
Abstract
Equivalent static load and dynamic analyses methods are usually used for designing structures under and subjected to earthquake excitations. Estimation of site response from an earthquake is fundamental step to anticipate the possible damages and then to try to mitigate them. In this paper, the effect of nonlinearity on site response analyses summarized and evaluating ground surface response taking into account the local soil and subsurface soils properties for the proposed bridge over the river at Sirdjan Boulevard road subjected to earthquake vibration and provokes with assumption of rigid (viscoelastic) and elastic half space bedrock and quantify the site effect on the surface over a number of geotechnical areas has been notified. First, by field investigation, the required data were collected and by primary processing the acceptable data were selected. Then, in nonlinear analysis, for elastic and rigid half space bedrock, standard hyperbolic model was selected and executed, and then the results were compared to each other. The critical point of this work was to develop and use a computer code by the authors, named the “Abbas Converter”, with several advantages, such as work and quick installation, operating as a connecter function between the used softwares and generating the input data corresponding to defined format for them. Its output results can easily be exported to the other used softwares in this study. This code can make and render this study more easily than the previous softwares have done, and take over the encountered problem. This study clearly showed the applicability of the “Abbas Converter” for evaluation of site response with bedrock-type assumption on soil behavior under the earthquake excitations. The proposed scheme is used to analyze the ground motion data from the Bam earthquake in Kerman Province, Iran (2003, Mw 6.5).
الملخص:
الطُرق لتحلیل کیفیۃ الضغط الثابت أو المتحرک یُستعمل فی اکثر الٲحیان لتخطیط العوامل المتٲثرۃ من الهزّۃ الارضیۃ. ٲمّا تقدیر جواب البناء الحاصلۃ من الهزۃ الارضیۃ هو الخطوۃ الٲساسیۃ لتبصّر الخسائر المحتملۃ و خفض هذه الخطرات. فی هذا البحث قد طُرح تاثیر غیر الخطیۃ لتحلیل جواب البناء و یستفاد من تقدیر جواب سطحیۃ الارض لخصائص التراب المحلیۃ و تحت السطحی حول جسر المخطط علی النهر فی الطریق سیرجان بولواورد.
وعالجنا اهتزازات الناشئۃ من الزلزال مع النظر الی الحجر السطح الصلب و المتمّغط فی النصف الدائرۃ (half space) و تطرقنا علی اثر هذه البناء فی السطح فی عدۃ المناطق الجیوتکنیکیۃ.
فی المرحلۃ الاولی بدأنا بتجمیع المعطیات المطلوبۃ بالحبوث الکثیرۃ و قد انتخبت المعطیات المقبولۃ اولاً. ثم فی التحلیل غیرالخطی (nonlinear) للحجر بصورۃ نصف الدائرۃ المتمّغط أو الصلب انتخب و اُجری نموذج التقنین (hyperbolic) و بعد ذلک قد قارّنا الاستنتاجات معاً. النقطۃ المفتاحیۃ فی هذا البحث، التوسیع و استعمال الرقم الکمبیوتریۃ المکتوبۃ بواسطۃ الکاتبین باسم "عباس المبدل" (Abbas Converter) مع المیزات الکثیرۃ منها التتشغیل و النصب السهل، الاستعمال کالدّالۃ الاتصالیۃ بین البرامج اللازمۃ و المستعملۃ و اعداد المعطیات الدخولیۃ مع المعیار البرامج المذکورۃ. هذا البحث یوّضع قابلیۃ الاجراء "للمبدّل عباس" (Abbas Converter) فی تقدیر جواب البناء خلال الهزۃ الارضیۃ. و قد استعمل من المعلومات المتربطۃ ال الزلزال فی مدینۃ بم فی استان الکرمان من الایران (2003, Mw6.5).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
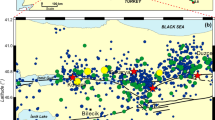
Bam earthquake occurred at 1:56 AM UTC (5:26 AM Iran Standard Time) on 26 Dec. of 2003. Its epicenter was roughly 10 km southwest of the ancient city of Bam with determined coordination by IIEES (2003) at 29.01 N and 58.26 E that is close to that mentioned by the USGS (2003) at 28.99 N, 58.29 E. Maximum intensities were at Bam and Baravat, with the most damage concentrated within the 16-km radius around the city. The Bam earthquake is 100 km south of the destructive earthquakes of 11 June of 1981 (M 6.6) with approximately 3,000 deaths, and 28 July of 1981(M 7.3), with approximately 1,500 deaths. These earthquakes were caused by a combination of reverse and strike–slip motion on the north–south-oriented Gowk fault. Towards the northwest of Bam, four major earthquakes with magnitudes greater than 5.6 have struck the cities and villages between 1981 and 1998. The strike of the main faults (including the Bam fault) in this region are N–S (Nayband, Chahar-Farsakh, Anduhjerd, Gowk, Sarvestan, and Bam faults), and NW–SE (Kuhbanan and Ravar faults). These two systems intersect in the western area of the Lut Desert. These intersection zones were some of the main sources for disastrous earthquakes, some of them are described as follows:
-
11 June 1981, Golbaf earthquake (M s 6.6): This was associated with a fault rupture along the Gowk fault and caused 1,071 life losses and caused great damage in the Golbaf region.
-
28 July 1981, Sirch earthquake (M s 7.0): occurred 49 days after the Golbaf earthquake and caused 877 life losses. It seems that this earthquake originated as the secondary faulting along the Gowk fault or the triggering of the rupture from the activation of the Gowk fault in the hidden continuation of the Kuhbanan, in their intersection zone. Such a situation might be the reason for the great earthquakes around Sirch in 1877 and 1981 (both magnitudes were greater than 7.0).
-
20 November 1989 South Golbaf earthquake (m b 5.6): caused four fatalities and 45 injured and some damages in Golbaf. Some surface faulting and folding have been reported to be related to this event.
-
14 March 1998 North Golbaf (Fandogha) earthquake (M w 6.6): caused five fatalities and 50 injured, and were associated with surface faulting (about 20 km length) north of Golbaf.
The record obtained in the Bam station shows the greatest PGA of 0.8×g and 0.7×g for the E–W horizontal and N–S horizontal components, respectively, and 0.98×g for the vertical component (all non-corrected values). The preliminary observations on the strong motion record obtained in the Bam station, as well as the observed damages in the region showed a vertical directivity effect. Table 1 shows the seismicity of the selected region.
Site response and site effect
The effect of local geology on ground motion propagation is significant and cannot be ignored. Empirical procedures have been developed to estimate site effects but are limited in applications. Site response analysis is commonly performed to estimate and characterize site effects by solving the dynamic equations of motion via an idealized soil profile.
Site effect and responses are associated with:
Superficial deposits
It has long been understood that earthquake ground motion can be significantly amplified by superficial deposits. Even though seismic waves generally travel along tens of kilometers of rock and less than 100 m of soil, the soil plays a very important role in determining the characteristics of ground motion (Kramer 1996). Therefore, understanding of site response of geological materials under seismic loading is an important element in developing a well-established constitutive model. Most recent destructive earthquakes (Mexico City, 1985; Loma Prieta, 1989; Northridge, 1994; Kobe, 1995; Kocaeli, 1999; Colombia, 1999; Bam, 2003; etc.) have brought additional evidence of the importance of site effect on ground motions. Accounting for such effects has therefore gained critical importance in seismic regulations, land use planning, and seismic design of critical facilities and to get this aim, the acceleration response spectra are mainly used to predict the effects of earthquake magnitudes on the relative frequency content of ground–bedrock motions.
Topographic and basin effects, liquefaction, ground failure and structural deficiencies
These are factors that potentially contribute to damage. The amplification of ground motion due to local site conditions plays an important part in increasing seismic damage (Rodriguez-Marek et al. 2000).
Profile depth
Site response is also a function of profile depth; thus, ignoring profile depth may have a detrimental effect in ground motion prediction and have also been introduced into most current attenuation relationships. However, most attenuation relationships account for site effects only through a broad site classification system that divides sites into “rock and shallow stiff soil”, “deep stiff soil”, and “soft soil” (Park and Hashash 2004; Rodriguez-Marek et al. 2000).
Dynamic stiffness, depth, impedance ratio between the soil deposit and underlying bedrock, the material damping of the soil deposits, and the nonlinear response of a soft potentially liquefiable soil deposit
Are important factors in seismic site response.
Soil type
The effect of nonlinearity is largely a function of soil type (Vucetic 1990; Vucetic and Dobroy 1991).
Cementation and geologic age
May also affect the nonlinear behavior of soils. To account partially for these factors, a site classification scheme should include the nonlinear behavior of soil and measuring the dynamic stiffness of the site and depth of the deposit (Rodriguez-Marek et al. 2000).
There are two main numerical methods for its solving namely, equivalent linear analysis method (frequency domain solution) and nonlinear analysis method (time domain solution); and for strong vibrations (medium and large earthquakes), the linear elastic solution is no longer valid. Soil behavior is inelastic, nonlinear, and strain-dependent.
-
Equivalent linear analysis (Schnabel et al. (1972):
-
1.
This method is performed in the frequency domain (only able linear viscoelastic representation of the true nonlinear soil behavior) and has been developed to approximate the nonlinear behavior of soil (Schnabel et al. 1972).
-
2.
Approximates nonlinear behavior by incorporating a shear–strain dependent shear modulus and damping soil curves (Park and Hashash 2004). In this approach, linear analysis is performed with soil properties that are iteratively adjusted to be consistent with an effective level of shear strain induced in the soil.
-
3.
It is essentially a linear method that does not account the change in soil properties in duration of ground motion.
-
4.
The frequency domain solution of wave propagation provides the exact solution when the soil response is linear.
-
5.
It is well accepted and most popular for approximate the actual nonlinear, inelastic response of soil and widely used in engineering practice due to its simplicity.
-
6.
Originally, it is based on the lumped mass model of sand deposits resting on a rigid base to which the seismic motion was applied.
-
1.
-
Nonlinear analysis:
-
1.
Uses a step by step integration time domain scheme.
-
2.
More accurately simulates the true nonlinear behavior of soils.
-
3.
Nonlinearity of soil starts from very small strain; therefore, consideration of that is inevitable.
-
4.
Is usually performed by using a discrete model such as finite element and lumped mass models.
-
5.
To give meaningful results, the stress–strain characteristics of the particular soil must be realistically modeled.
-
6.
The accuracy of time domain solution depends on the time steps.
-
1.
Yoshida (1994); Huang et al. (2001) and Yoshida and Iai (1998) showed that equivalent linear analysis shows larger peak acceleration because the method computes and takes into account the acceleration in high frequency range. The nonlinearity of soil behavior is known very well; thus, most reasonable approaches to provide reasonable estimates of site response are very challenging areas in geotechnical earthquake engineering.
In strong motion propagation, the strain vibration during loading is significant and cannot be approximated by representative strain throughout the duration of shaking; thus, evaluation of ground response is one of the most crucial problems encountered in earthquake motion analysis. An alternative way for taking over to this problem is based on computer codes, developed from the knowledge of the seismic source process and of the propagation of seismic waves, that can simulate the ground motion associated with the given earthquake scenario (Arslan and Siyahi 2006; Romanelli and Vaccari 1999; Park and Hashash 2004).
The importance of site effect on seismic motion has been realized since the 1920s and quantitative studies have been conducted using strong motion array data after the 1970s. There have been many researches on site response analysis of ground under earthquake loading and excitation, that some of them have described in Table 2.
Nonlinear behavior
Soil behavior is nonlinear when shear strains exceed about 10−5 (Hardin and Drenvich 1972). The nonlinear behavior of soils is the most important factor in ground motion propagation and should be accounted for when soil shearing strains are expected to exceed the linear threshold strain. In site response analysis, soil properties including shear modulus and cyclic soil behavior are required. Shear modulus is estimated using field tests such as seismic down hole or cross hole tests. Cyclic soil behavior is characterized using laboratory tests such as resonant column, cyclic triaxial, or simple shear tests. The maximum shear modulus is defined as G max and corresponds to the initial shear modulus. The slope of the stress–strain curve at a particular strain is tangent shear modulus (G tan). The secant shear modulus (G sec) is the average shear modulus for a given load cycle. The G sec decreases with increase in cyclic shear strain. Instead of defining the actual hysteresis loop, the cyclic soil behavior is often represented as shear modulus degradation and damping ratio curves. The shear modulus degradation curve relates secant shear modulus to cyclic shear strain, whereby shear modulus is normalized by the maximum or initial shear modulus.
In situ measurement of V s using geophysical methods is the best method for measuring the G max (Rolling et al. 1998). Geophysical methods are based on the fact that the velocity of propagation of a wave in an elastic body is a function of the modulus of elasticity, Poisson ratio, and density of material (Hvorslev 1949).
By consideration, a uniform soil layer lying on an elastic layer of rock that extends to infinite depth and the subscripts s and r refer to soil and rock, the horizontal displacement due to vertically propagation harmonic S wave in each material can be written as:
u displacement, ω circular frequency of the harmonic wave, k* complex wave number No shear stress can exist at the ground surface (z s = 0), so
Where G *s = G (1 + 2iξ) is the complex shear modulus of the soil. Schnabel et al. (1972) explained that within a given layer (layer j); the horizontal displacements for two motions (A and B) may be given as:
Thus, by consideration of h as the thickness of the layer, at the boundary between layer j and j + 1, compatibility of displacements requires that:
The effective shear strain of equivalent linear analysis is computed as:
γ max maximum shear strain in the layer, R γ strain reduction factor, M magnitude of earthquakeThe motion at any layer can be easily computed from the motion at any other layer (e.g., input motion imposed at the bottom of the soil column) using the transfer function that relates displacement amplitude at layer i to that the layer j:
Harmonic motions and the transfer function can be used to compute accelerations and velocities. The main reason for using linear approach is that the method is computationally convenient and provides reasonable results for some practical cases (Kramer 1996). The nonlinearity of soil stress–strain behavior for dynamic analysis means that the shear modulus of the soil is constantly changing. Both time and frequency domain analyses are used to account for the nonlinear effects in site response problems. Nonlinear and equivalent linear methods are utilized, respectively, in the time and frequency domain for the 1D analysis of shear wave propagation in layered soil media. When compared with earthquake observation, nonlinear analysis is shown to agree with the observed record better than the equivalent linear analysis (Arslan and Siyahi 2006).
The nonlinear hyperbolic model used in this paper was developed by Konder and Zelasko (1963) to model the stress–strain soil behavior of soils subjected to constant rate of loading. The hyperbolic equation is defined as:
τ shear stress, γ shear strain, G mo initial shear modulus, τ mo shear strength, γ r = τ mo/G mo reference shear strain
The reference shear strain is strain at which failure would occur if soil were to behave elastically. It has been considered a material constant by Hardin and Drenvich (1972). The reference strain can also be represented as function of initial tangent modulus and undrained shear strength in clays (Mersi et al. 1981). The hyperbolic model has been implemented in many site response analysis codes, such as DERSA. One of the most reliable methods to characterize G max, is in situ measurement of V s in the field at small strain using seismic methods (Rolling et al. 1998). On the ground surface at strain levels less than 0.001%, G max can be determined from the measured V s profile by assuming the density (ρ) as:
G max can also be estimated directly from N values in the field as:
Several correlations are reported between V s and N values measured in the field and are comprehensively summarized in Table 1, which are often expressed in the following form:
A, B constant parameters and are often accompanied by a correlation coefficient R. Usually, the trend observed is that if A increases B decreases for the same type soil (Ohsaki and Iwasaki 1973; Imai 1977; Ohta and Goto 1978; Imai and Tonouchi 1982). Estimation of V s can be improved, if the effective stress is included in the regression equation. Similarly, Table 3 can be used to estimate G max by assuming the density of soil, since slight variation of density does not influence the estimated value.
Data and analysis method
Three major steps were considered for this study:
-
1.
Characterization of site based on field investigation and laboratory test results.
-
2.
Elect and apply the rock motions (natural or synthetic acceleration time histories) on soil profile column to represent the effect of motion for the site in elastic and rigid half space conditions.
-
3.
Analysis and development of site surface response spectra.
Using the rock time history as input motion, ground response analysis is conducted for the modeled soil profiles to compute ground motion at the surface. Response spectra of the motions of the surface are computed for various analysis made. Figure 1 shows the steps of this study.

Site specific ground response analysis
The study was performed by the following software:
Seismosignal
Capable to derive a number of strong motion parameters often required by engineer seismologist and earthquake engineering. In this study, the Bam strong motion in Kerman province (2003, Iran, Mw6.5) as rock motion at bedrock were applied on the bottom of profile for each borehole location based the hypocentral distance calculated for them which try to present the effect of vibrations on selected site. The recorded data was picked up from BHRC web site of Iran. The input motion was drawn as shown in Figs. 2, 3, and 4. The time histories as input motions are assigned to measure at the hypothetical rock outcrop at the site rather than directly at the base of the soil profile. This is because the knowledge of motions is based on recording at rock outcrops and unless the rock is rigid, the motions at the base of the soil profile will differ from those of outcrop.

Bam earthquake, L component (PGA = 7.991g at t = 47.450 s, V max/a max = 0.259 s)

Bam earthquake, T component (PGA = 6.634g at t = 39.140 s, V max/a max = 0.200 s)

Bam earthquake, V component (PGA = 9.885g at t = 37.910 s, V max/a max = 0.086 s)
LisCAD v6.2
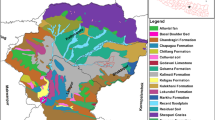
This software was performed for geotechnical map drawing for selected area.
Log 2.1
Boreholes logging as physical, mechanical, in situ tests and geological sections were drawn by this software.
Proshake
Used for comparisons of modulus reduction curves for selected boreholes, corresponding to defined input motion and V s profile for selected area. It is possible to find out the G max after soil definition.
SMSIM (Boore 2003)
If the natural recorded time history for the selected region was not available, artificial motion or time history to evaluate the surface response spectra would be used. It is the reason for using the SMSIM code which is designed by David. M. Boore (2003).
Curve expert 1.3 (mathematical software) and MATLAB programming environment
The regression models (both linear and nonlinear) as well as various interpolation schemes were performed and compared by these softwares.
UIUC developed software
This is used to obtain the response of site in nonlinear state.
Designed computer code by the authors, the “Abbas converter”
Because of the limitation in software applicability, by itself, none of the above softwares can reply to all requested parameters because of the use of a specific predefined format. For this reason, the authors were forced to produce a computer program to generate the new data, information, and motions corresponding to seismotectonic motions of the selected area and convert the primary input of the mentioned softwares to the other. The start and converter screen of this code is shown in Figs. 5 and 6. The recorded earthquakes of Iran were established as the sample inputs for this code. It can also build the geotechnical model and classify the site based on a geotechnical point of view. In addition, this code can represent the motion with all of its properties before using the mentioned softwares. This is the main reason for designing the “Abbas Converter”. This produced code has several advantages such as:

Start screen of “Abbas Converter”

Converter screen of “Abbas Converter”
-
1.
Work and installs quickly.
-
2.
Operates as a logic connecter link between the used softwares.
-
3.
Can generate the input data corresponding to the defined format for the used softwares.
-
4.
Its output results can easily be exported to the other used software in this study.
-
5.
This designed software makes and renders the study more easily than previous softwares have done.
-
6.
With it, the authors could enter recorded data with a different format as an input and take a defined format for used softwares.
This code has a graphical user interface and allows the user to select the required item. In this code, the user has two choices. By clicking in Input Earthquake Data (Record) it is possible to select the recorded earthquake of Iran which is placed as samples or browse the desired file. Also, this code can present the properties of the motion. In the Geotechnical Model, the user can simulate the idealized soil profile and the code will compute the soil characteristics. It can present the type of the geotechnical category of the site according to the defined procedure. This code has an ability to draw each selected parameter versus each other. At first, by the use of the “Abbas Converter”, the recorded data is converted as input for seismosignal. Then, the output file of the seismosignal by the use of the “Abbas Converter” will be applicable as input motion for Proshake, and with this arrangement, the output of Proshake will be the input for UIUC developed software.
At the end, by Curve expert1.3 and MATLAB environment, both linear and nonlinear regression models schemes were performed and compared. As a previous illustrated method shows, the “Abbas Converter” facilitates and renders the procedure more easily than other softwares have done. In this study for nonlinear time domain analysis, the standard hyperbolic model with elastic half space bedrock for first analysis and rigid half space for the second one, flexible time control, maximum strain increment about 0.005, and damping matrix defined with frequency for soil properties modeling were selected and performed.
Testing program was performed in two steps:
Field tests→field density, moisture content, soil type, SPT, and standard load tests.
A total of 16 bore holes were performed with truck-mounted rotary drilling rig. Out of 16 borelogs, eight of them were carefully evaluated (in this paper, the results of two borelogs (E3, E4) were presented). In order to obtain reliable information and accurate data regarding the structural pattern of the subsurface soil, eight boring holes were dug down to a maximum depth of 15 m by means of human hands and effort performance of the field and laboratory tests. The others were drilled for performance of SPT tests. Steel casing was inserted into each bore holes for stability of the sides. Soil condition indicates medium to hard sandy gravel or gravelly sand with different porosity, void ratio, water content, and unit dry weight to a depth of 15 m. In these sites, the water table was not found up to a depth of 15 m at the time of drilling operation.
Laboratory tests→specific gravity, Atterburg limits, sieve analysis, direct shear tests, and chemical analysis.
After completion of the testing program, all the soil samples were visually reclassified in the laboratory according to USCS. On the basis of field and laboratory investigation and tests, idealized soil profiles are developed and improved for the selected site as shown in Table 4 and Figs. 7, 8, and 9. The soil profile for comparison must be created and modified. Obtained information from the drilled holes, SPT, density, V s, and their variations for each soil layer were determined at the investigated site as shown in Figs. 10 and 11. It is clear that the ground motion amplitude depends on the density and shear wave velocity of subsurface material. Usually, in situ density has relatively smaller variation with depth and thus the V s is the logical choice for representing site conditions. V s of surficial sediments were investigated in correlation with geotechnical properties determined by laboratory testing and, in addition, lithofacies based on detailed core investigation were taken in to account for the correlation analysis. N values (one of the most common parameters for the evaluation of geotechnical properties of soils) obtained by in situ field measurement SPT, bulk densities, solidities, and mean grain size measured by the standard soil test and V s were correlated to N values to obtain the empirical relationship between them. Despite its incorrectness, N value is quite attractive because of the existence of a large amount of data at 1-m interval, which makes it easy to correlate with V s. The proposed method in this study was presented in Fig. 12. In view of this, no attempts were made for developing the regression correlation based on the entire dataset and N values from locations where tests were conducted; thus, for this study, 128 pairs of N values and V s were applied and a formula which explained V s as a function of N value was determined as shown in Table 5.

Site plan of test boring

Location of test boring

Cross section of drilled boreholes

Variation of SPT (N) vs. depth

Variation of density vs. depth

Schematic proposed procedure for this study
Elastic constants determined by triaxial dynamic loading tests were correlated with V s at the same horizons in the same boreholes. The shear modulus is evaluated based on the equation developed by Imai and Tonouchi (1982) using corrected SPT and N values. The applied rock motion is assigned at the bedrock level as input in seismosignal, and by use of “Abbas Converter” exported to Proshake and UIUC. PGA values and acceleration time histories at the top of each sub layer was evaluated. Response spectra at the top of the bedrock and at ground surface and amplification spectrum between the first and last layer were obtained as shown in Figs. 13, 14, and 15. Similarly, stress–strain time history and Fourier amplitude spectrum can be obtained for all the borehole locations. The PGA values at the bedrock level are amplified based on the soil profile at various locations. Obtained results from Fig. 13 are as follows:

Computed response in various states

Amplification ratio (elastic half space)

Amplification ratio (rigid half space)
Borehole | Condition | Damping (%) | Max at... |
E4 | Elastic half space | 0 | 19.69 g (5.26 s) |
E4 | Elastic half space | 5 | 13.65 g (5.25 s) |
E3 | Elastic half space | 0 | 15.62 g(6.08 s) |
E3 | Elastic half space | 5 | 12.37 g(6.44 s) |
E4 | Rigid half space | 0 | 20.13 g(5.31 s) |
E4 | Rigid half space | 5 | 13.86 g(5.29 s) |
E3 | Rigid half space | 0 | 12.48 g(6.41 s) |
E3 | Rigid half space | 5 | 13.86 g(5.26) |
Obtained results from Figs. 14 and 15 are as follows:
Condition | E3 | E4 |
Rigid half space | 114.2(Freq. = 3.2715 Hz) | 115(Freq. = 4.7363 Hz) |
Elastic half space | 2.883(Freq. = 9.1309 Hz) | 2.413(Freq. = 5.5176 Hz) |
In general, damping ratio decreases with increasing depth (Elgamal et al. 2005). In more than 60-m depths, the soil response was practically linear (Elgamal et al. 1996) and it maintains the same stiffness and response patterns throughout the earthquake. Relative density has no significant influence on the dynamic properties of soils in the large strain (>1%) levels, but it has considerable influence at small strain levels (Sitharam et al. 2004a, 2004b). The seismic geophysical tests do not provide a realistic estimation of material damping which can be determined accurately only by laboratory testing (Boominathan 2004). Figures 16 and 17 show the computed results by assumption of elastic and rigid half space bedrock for nonlinear site response analysis.

Computed response spectra in various conditions

Computed motions in various conditions
Conclusion and discussion
It is widely accepted that the V s profile of a site is a fundamental parameter to estimate the site response and amplification factor. In most geotechnical investigation programs, dynamic in situ tests are usually not conducted due to cost considerations and lack of specialized personnel. For this reason, many attempts have been made in the past to correlate values of V s or shear modulus to other readily available soil parameters such as N values. Several empirical equations have been proposed for estimating the V s by use of several soil indices, so as to avoid in situ measurement and also to examine the physical relation between soil indices and V s. The most common relations are based on the N value obtained from the SPT. Shear modulus and damping ratio of soils is a function of the amplitude of shear strain under cyclic loading. Modulus reduction and damping curves of local soils are an essential input for carrying out ground response analysis using the most commonly used equivalent linear technique.
In many regions, the subsoil medium is not sufficiently recognized to simulate the wave’s propagation in a relevant frequency band for earthquake engineering purposes (between 0.1 and 20 Hz), thus experimental measurements plays very important and substitutable role for reliable prediction of seismic loads, which is a crucial information for solution of seismic impacts on bridges and other structures. Computed results of this study shows that all the desired parameters (output acceleration time history, maximum output of response spectra (0.1–1 s), Fourier amplitude, variations of PGA profile, column displacement in equal condition for two states, amplification ratio and spectral acceleration) for elastic half space is less than rigid condition.
This paper is an attempt to show and discuss what is currently known about the time domain nonlinear site response analysis with elastic and rigid half space bedrock and ultimately compares the obtained results' similarities and differences about both. The obtained results on response spectra can then be statistically analyzed and/or interpreted in some methods to develop design response spectra of site surface motions. The time histories obtained from the site response analyses can be used as representative time histories of surface motions. Because the response spectra of the input motions may not closely match the design response spectrum, particularly when natural time histories are used, it may be desirable to obtain site amplification ratios from the site response analyses rather than using the response spectra of computed surface motions directly. Based on these results on the estimate of site amplification, ratios can be selected and used to multiply the design response spectrum to develop an estimate of site and ground surface response spectrum. This paper and study showed that based on 1D site response analyses, the effect of nonlinear soil behavior is one of the key factors for response spectra. Distribution of maximum acceleration along the depth and spectrum ratios has proved that rigid half space bed rocks compute larger PA.
References
Arslan H, Siyahi B (2006) A comparative study on linear and nonlinear site response analysis. Environ Geol 50:1193–1200
Boominathan A (2004) Seismic site characterization for nuclear structures and power plants. Curr Sci 87:1384–1397
Boore DM (2003) SMSIM: Stochastic Method SIMulation of ground motion from earthquakes. In: Lee WHK, Kanamori H, Jennings PC, Kisslinger C (eds) International handbook of earthquake and engineering seismology, Chapter 85.13, 81B and CD #3, Academic Press, Amsterdam, pp 1631–1632
Borja RI, Chao HY, Montas FJ, Lin CH (1999) Nonlinear ground response at Lotung LSST site. J Geotech Geoenviron Eng 125(3):187–197
Elgamal AW, Zeghal M, Parra E, Gunturi R, Tang HT, Stepp JC (1996) Identification and modeling of earthquake ground response I. Site amplification. Soil Dyn Earthquake Engg 15:499–522
Elgamal AW, Yang Z, Lai T, Kutter BL, Wilson DW (2005) Dynamic response of saturated dense sand in laminated centrifuge container. J Geotech Geoenv Engg ASCE 131:598–609
Field EH, Johnson PA, Bersenev IA, Zeng Y (1997) Nonlinear ground motion amplification by sediments during the 1994 Northridge earthquake. Nature 390:599–602
Hanumantharao C, Ramana GV (2008) Dynamic soil properties for microzonation of Delhi, India. J Earth Syst Sci 172:719–730
Hardin BO, Drenvich VP (1972) Shear modulus and damping in soils: measurement and parameter effects. Journal of Soft Mechanics and Foundation Division 98(SM6):603–624
Huang HC, Shieh CS, Chiu HC (2001) Linear and nonlinear behaviors of soft soil layers using Lotung downhole array in Taiwan. Terr Atmos Ocean Sci 12:503–524
Hvorslev MJ (1949) Subsurface exploration and sampling ofsoils for civil engineering purposes. Waterway Experiment Station, Vicksburg, p 521
Hwang HHM, Lee CS (1991) Parametric study of site response analysis. Soil Dyn Earthq Eng 10(6):282–290
Idriss IM (1990) Response of soft soil sites during earthquakes. Proceedings of the symposium to Honor H.B. Seed, Berkeley, CA, 273–289
Imai T (1977) P and S wave velocities of ground in Japan. In: Proceedings of the IX international conference on soil mechanics and foundation engineering, vol 2, pp 127–132
Imai T, Tonouchi K (1982) Correlation of N-value with S-wave velocity. Proc. 2nd Euro Symp on Penetration Testing, 67–72
Joyner WB, Chen ATF (1975) Calculation of nonlinear ground response in earthquake. BSSA 65:1315–1336
Konder RL, Zelasko JS (1963) A hyperbolic stress-strain formulation for sands. In: Proceeedings of 2nd pan american conference on soil mechanics and foundation engineering, Sao Paulo, Brazil, pp 289–324
Kramer SL (1996) Geotechnical earthquake engineering. In Prentice-Hall international series in civil engineering and engineering mechanics. Prentice-Hall, New Jersey
Mersi G, Febres-Cordero E, Sheilds DR, Castro A (1981) Shear stress–strain time behavior of clays. Geotechinique 31(4):537–552
Ohsaki Y, Iwasaki R (1973) On dynamic shear moduli and Poisson's ratio of soil deposits. Soil Found 13(4):61–73
Ohta Y, Goto N (1978) Empirical shear wave velocity equations in terms of characteristic soil indexes. Earthq Eng Struct Dyn 6:167–187
Park D, Hashash YMA (2004) Soil damping formulation in nonlinear time domain site response analysis. J Earthqu Eng 8(2):249–274
Rodriguez-Marek A, Bray JD and Abrahamson NA (2000) A geotechnical seismic site response evaluation procedure. In Proceeding of 12 WCEE, Auckland, New Zealand
Rodriguez-Marek A, Williams JL, Wartman J (2001) Repetto PC (2003), Southern Peru Earthquake of 23 June, 2001: Ground motions and earthquake site response. Earthq Spectra 19A:11–34
Rolling KM, Evans MD, Diehl NB, Daily WD (1998) Shear modulus and damping relationships for gravel. J Geotech Geoenv Engg, ASCE 124:396–405
Romanelli F, Vaccari F (1999) Site response estimation and ground motion spectrum scenario in the Catania area. J Seismol 3:311–326
Schnabel PB, Lysmer J, Seed HB (1972) SHAKE: a computer program for earthquake response analysis of horizontally layered sites. Report No. EERC72-12, University of California, Berkeley
Seed HB, Idriss IM (1970) Soil moduli and damping factors for dynamics response analysis. Report No. EERC70-10, University of California, Berkeley
Seed HB, Murarka R, Lysmer J, Idriss IM (1976) Relationships between maximum acceleration, maximum velocity, distance from source and local site conditions for moderately strong earthquakes. BSSA 66(4):1323–1342
Sitharam TG, Govindaraju L, Sridharan A (2004a) Dynamic properties and liquefaction potential of soils. Curr Sci 87:1370–1378
Sitharam TG, Govindaraju L, Srinivasa Murthy BR (2004b) Evaluation of liquefaction potential and dynamic properties of silty sand using cyclic triaxial testing. Geotech Testing J, ASTM 27:1–7
Vucetic M (1990) Normalized behavior of clay under irregular cyclic loading. Can Geotech J 27:29–46
Vucetic M, Dobroy R (1991) Effect of soil plasticity on cyclic response. J Geotech Eng 117(1):87–107
Yoshida N (1994) Application for conventional computer code SHAKE to nonlinear problem. In proceedings of symposium on amplification of ground shaking in soft ground
Yoshida N, Iai S (1998) Nonlinear site response analysis and its evaluation and prediction. In: 2nd international symposium on the effect of surface geology on seismic motion, Yokosuka, Japan, pp 71–90
www.BHRC.ac.ir (Building and Housing Research Center of Iran)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Abbaszadeh Shahri, A., Esfandiyari, B. & Hamzeloo, H. Evaluation of a nonlinear seismic geotechnical site response analysis method subjected to earthquake vibrations (case study: Kerman Province, Iran). Arab J Geosci 4, 1103–1116 (2011). https://doi.org/10.1007/s12517-009-0120-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12517-009-0120-7