
Abstract
Site response analysis is usually the first step of any seismic soil-structure study. Geotechnical earthquake engineers and engineering geologist have been trying to find both practical and most appropriate solution techniques for ground response analysis under earthquake loadings. The paper attempts to give a critical overview of the field of site response analysis. In this paper, the influences of nonlinearity on the site response analysis summarized and were evaluated with a numerical example. Site response of a two layered soil deposit with the assumption of linear and rigid base bedrock (or viscoelastic half-space) was analyzed by using linear and nonlinear approaches. The amplification spectrum of the soil column is computed between the top and the bottom of this soil deposit. Nonlinear analysis was compared with the linear method of analysis. Steps involved in ground response analyses to develop site-specific response spectra at a soil site are briefly summarized. Some of the well-known site response analysis methods are summarized and similarities and differences between linear and nonlinear methods are compared by a numerical example.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Geotechnical earthquake engineering deals with the effects of earthquakes on people and environments. Thus, engineering geologist and geotechnical earthquake engineers try to find most appropriate methods to reduce the magnitude of earthquake related hazards. Evaluation of ground response is one of the most crucial problems encountered in geotechnical earthquake analysis. Ground response analyses are used to predict surface ground motions for development of design response spectra, to evaluate dynamic stresses and strains for evaluation of liquefaction hazards, and to determine the earthquake-induced forces that can lead to instability of earth and earth-retaining structures (Kramer 1996).
The acceleration response spectra are mainly used to predict the effects of earthquake magnitudes on the relative frequency content of ground-bedrock motions. Even though seismic waves generally travel tens of kilometers of rock and less than 100 m of soil, the soil plays a very important role in determining the characteristics of ground motion (Kramer 1996).
The acceleration time histories thus obtained together with the complete description of the dynamic properties of the soils determined from seismic refraction studies are used to understand the responses of the soil columns to earthquake waves. Understanding of site response of geological materials under seismic loading is an important element in developing a well-established constitutive model. A number of different techniques have been developed for site response analysis since 1920s.
Equivalent linear model is one of the most widely used approaches to model soil nonlinearity. To approximate the actual nonlinear, inelastic response of soil, an equivalent linear approach was proposed by Schnabel et al. (1972). In the equivalent linear approach, linear analyses are performed with soil properties that are iteratively adjusted to be consistent with an effective level of shear strain induced in the soil. Yoshida (1994), Huang et al. (2001) and Yoshida and Iai (1998) showed that equivalent linear analysis shows larger peak acceleration because the method calculates acceleration in high frequency range large.
The nonlinearity of soil behavior is known very well thus most reasonable approaches to provide reasonable estimates of site response is very challenging area in geotechnical earthquake engineering. In this paper, nonlinear and equivalent linear approach of site response analysis will be compared and similarities and differences will be summarized with a numerical example. The main objective of this paper is to compare the linear and nonlinear site response analysis techniques as an overview and as numerically and to show their similarities and differences.
Previous studies on site response analysis
The importance of site effects on seismic motion has been realized since 1920s. Since then, many studies have been conducted. The amplification due to sediments is well understood in terms of linear elasticity for the weak ground motion accompanying small earthquakes, but there has been a debate regarding the amplification associated with the strong ground motion produced by large earthquakes. As Field et al. (1997, 1998) explained, the view of geotechnical engineers, based largely on laboratory studies, is that Hooke’s law (linear elasticity) breaks down at larger strains causing a reduced (nonlinear) amplification. Seismologists, on the other hand, have tended to remain skeptical of this nonlinear effect (Field et al. 1997), mainly because the relatively few strong-motion observations seemed to be consistent with linear elasticity.
Quantitative studies have been conducted using strong-motion array data after 1970s. Several methods have been proposed for evaluating site effects by using ground motion data, such as soil-to-rock spectral ratios (e.g., Borcherdt 1970), a generalized inversion (e.g., Iwata and Irikura 1988; Boatwright et al. 1991), and horizontal-to-vertical spectral ratios (e.g., Nakamura 1988; Lermo and Chavez-Garcia 1993; Field and Jacob 1995; Yamazaki and Ansary 1997; Bardet et al. 2000; Bardet and Tobita 2001; Lam et al. 1978; Joyner and Chen 1975).
Analytical methods for site response analysis include many parameters that could affect earthquake ground motions and corresponding response spectra. It is important to investigate the effect of these parameters on site response analysis in order to make confident evaluations of earthquake ground motions at site. Seed and Idriss (1970), Joyner and Chen (1975) and Hwang and Lee (1991) investigated the effects of site parameters such as secant shear modulus, low-strain damping ratio, types of sand and clay, location of water table, and depth of bedrock. The parametric studies have shown that the secant shear modulus, depth of bedrock, and types of sand and clay have a significant effect on the results of site response analysis. However, the low-strain damping ratio and variations of water tables have only a minor influence on site response analysis.
Two basic approaches have commonly been employed for representing soil stress–strain behavior during cyclic loading, for application in site response analysis. The first, in which the soil is modeled by a series of springs and frictional elements (Iwan model), uses Masing’s rules to establish the shape of the cyclic, hysteresis curves (Seed et al. 1972). This model does not normally simulate the degradation observed due to cyclic loading of soils, nor does it provide a good simulation of the observed strain dependence of the shear modulus and damping ratio. Furthermore, application of Masing’s rules does not provide an adequate approximation simultaneously for shear modulus and damping ratio. In the second approach, damping is modeled as a viscous, rather than frictional, effect. This approach is adopted, which uses a pseudo-linear treatment, and applies an iterative procedure in order to account for the strain dependence of modulus and damping (Schnabel et al. 1972). The main shortcoming of the linear method is its inability to take account of the strong strain dependence observed experimentally for shear modulus and damping ratio. The best that can be done with the linear model is to apply the method of iterations, and to set values of shear.
Borja et al. (1999) developed a fully nonlinear finite-element (FE) model to investigate the impact of hysteretic and viscous material behavior on the downhole motion recorded by an array at a large-scale seismic test site in Lotung, Taiwan, during the earthquake of 20 May 1986. The constitutive model was based on a three-dimensional bounding surface plasticity theory with a vanishing elastic region, and accounts for shear stiffness degradation right at the onset of loading. The accuracy of the method proposed by Borja et al. (1999) is good, although the peak values were slightly underpredicted.
Rodriguez et al. (2001) proposed and empirical geotechnical seismic site response procedure that accounts the nonlinear stress–strain response of earth materials under earthquake loading. In this study, the primary effects of material nonlinearities are: the increases of site period and material damping as the intensity of ground motion increases. The larger damping ratio is observed in lower spectral amplifications for all periods. However, the effect of damping is pronounced for high frequency motion. Thus, soil damping significantly affected the peak acceleration.
In summary, there have been many researches on site response analysis of ground under earthquake loading. Equivalent linear approach (Schnabel et al. 1972) is widely used for site response analysis. In the following section, equivalent linear approach and nonlinear approach proposed by Kramer (1996) will be compared to illustrate similarities and differences of linear and nonlinear approaches.
Background for equivalent linear and nonlinear site response analysis
Schnabel et al. (1972), Idriss and Sun (1992) and Kramer (1996) explained that the actual nonlinear hysteretic behavior of cyclically loaded soil can be approximated by equivalent linear approximation. Linear approximation requires an equivalent shear modulus (G) and equivalent linear damping ratio (ξ). SHAKE (Schnabel et al. 1972) is the most known computer program that uses equivalent linear approximation, used widely. This code based on the multiple reflection theory, and nonlinearity of soil is considered by the equivalent linear method. Unlike the name of “equivalent,” this is an approximate method.
SHAKE uses a frequency domain approach to solve the ground response problem. In simple terms, the input motion is represented as the sum of a series of sine waves of different amplitudes, frequencies, and phase angles (Schnabel et al. 1972). A relatively simple solution for the response of the soil profile to sine waves of different frequencies (in the form of a transfer function) is used to obtain the response of the soil deposit to each of the input sine waves. The overall response is obtained by summing the individual responses to each of the input sine waves.
To illustrate the basic approach used in SHAKE, consider a uniform soil layer lying on an elastic layer of rock that extends to infinite depth, as illustrated in Fig. 1. If the subscripts s and r refer to soil and rock, respectively, the horizontal displacements due to vertically propagating harmonic s-waves in each material can be written as
where u is the displacement, ω is the circular frequency of the harmonic wave and k * is the complex wave number. No shear stress can exist at the ground surface (z s=0), so
where \(G_{{\rm s}}^{*} = G(1 + 2{\rm i}\xi)\) is the complex shear modulus of the soil.

Bedrock half-space interface
In the equivalent linear approach, the shear modulus is taken as the secant shear modulus which, as shown to the right, approximates an “average” shear modulus over an entire cycle of loading. Because the transfer function is defined as the ratio of the soil surface amplitude to the rock outcrop amplitude, the soil surface amplitude can be obtained as the product of the rock outcrop amplitude and the transfer function. Therefore, the response of the soil layer to a periodic input motion can be obtained by the following steps (Idriss and Sun 1992).
Schnabel et al. (1972) explained that within a given layer (layer j), the horizontal displacements for the two motions (motions A and B) may be given as:
Thus, at the boundary between layer j and layer j + 1, compatibility of displacements requires that
Continuity of shear stresses requires that
The effective shear strain of equivalent linear analysis is calculated as
where γmax is the maximum shear strain in the layer and R γ is a strain reduction factor often taken as
in which M is the magnitude of earthquake.
While the equivalent linear approach allows the most important effects of nonlinear, inelastic soil behavior to be approximated, it must be emphasized that it remains a linear method of analysis. It is based on the continuous solution of the wave equation, adapted to use with transitory movements by means of the Fast Fourier Transform algorithm. The strain-compatible shear modulus and damping ratio remain constant throughout the duration of an earthquake—when the strains induced in the soil are small and when they are large. Permanent strains cannot be computed and pore water pressures cannot be computed. However, the equivalent linear approach has been shown to provide reasonable estimates of soil response under many conditions of practical importance.
Maximum shear modulus of a layer is calculated via
in which G max is maximum shear modulus, ρ is density of the soil, γ is unit weight, and g is the acceleration of gravity.
As Finn et al. (1978) and Kramer (1996) explained the method is incapable of representing the changes in soil stiffness that actually occurs under cyclic loadings. In addition, the behavior of geological materials under seismic loading is nonlinear.
Nonlinear site response analysis
Main reason using linear approach is the method is computationally convenient and provides reasonable results for some practical cases (Kramer 1996). However, the nonlinear and inelastic behavior of soil is well established in geotechnical engineering. The nonlinearity of soil stress–strain behavior for dynamic analysis means that the shear modulus of the soil is constantly changing. The inelasticity means that the soil unloads along a different path than its loading path, thereby dissipating energy at the points of contact between particles. Both time domain and the frequency domain analyses are used to account for the nonlinear effects in site response problems. Nonlinear and equivalent linear methods are utilized respectively in the time and frequency domain for the one-dimensional analyses of shear wave propagation in layered soil media. When compared with earthquake observation, nonlinear analyses are shown to agree with the observed record better than the equivalent linear analysis.
Kramer (1996) developed a nonlinear approach as by this method a nonlinear inelastic stress–strain relationship is followed in a set of small incrementally linear steps.
The soil medium is divided into sublayers with absolute displacements u j , defined at the jth sublayer, interface and with shear stress, τ j , defined at the midpoints of each interface. As Kramer (1996) explained, the response of soil deposit under dynamic loading is governed by the equation of motion:
The differentiation for a soil divided to N sublayers of thickness Δz and proceeding for the small time increment (Δt) is calculated by using finite difference method as
where \( \dot{u} = \partial u / \partial t\) is the velocity of the motion and \(\partial^{2} u / \partial t^{2} = \partial \dot{u} / \partial t\) is the acceleration.
If we combine Eqs. 10, 11, and 12, we will get
The equation can be simplified as:
It should be noted that for the soil surface the shear stress is equal to zero and boundary condition for each sublayer must be satisfied.
Joyner and Chen (1975) proposed an equation for soil rock boundaries as:
By using Eqs. 14 and 15, boundary conditions are satisfied.
Kramer (1996) gave the shear for each layer as:
As can be seen from the above equations, the shear stress is calculated by using current shear strain and stress–strain history \((\tau_{{i,t}} = G_{i} \gamma_{{i,t}})\). Thus the proposed method satisfies the nonlinear and inelastic behavior of soil under cyclic loading. The nonlinear method is implemented into commercial software MATLAB and the results are compared with SHAKE for two layers soil deposit.
Numerical example
Nonlinear and linear approximations are compared in a two layers soil deposit as shown in Fig. 1. Total thickness of the soil deposits is 180 m. The top soil is silty sand (SM) with 75 m thickness and 19.5 kN/m3 mass density (ρ1) and 420 m/s shear wave velocity V S1 = 420 m/s. Lower layer is silty gravel (GM) with 105 m thickness and mass density, ρ2 = 19.5 kN/m3 and the shear wave velocity and V S2 = 600 m/s. The shear wave velocity of the half-space interface is 1,000 m/s.
The results of site response analyses were presented in terms of acceleration time history and response spectra. As explained in previous sections, SHAKE uses linear equivalent approaches with an iterative procedure to obtain soil properties compatible with the deformations developed in each stratum. The method of analysis used in SHAKE cannot allow for nonlinear stress–strain behavior because its representation of the input motion by a Fourier series and use of transfer functions for solution of the wave equation rely on the principle of superposition—which is only valid for linear systems.
The input and output motion of the soil medium is given through Figs. 2, 3, 4, 5, 6, and 7. The comparison of linear elastic numerical analysis by using SHAKE and nonlinear analysis are given in Figs. 8, 9, and 10, and the results are summarized in Table 1.

The normalized strain-dependent damping ratio (Seed and Idriss 1970)

The normalized strain-dependent shear modulus ratio (Seed and Idriss 1970)

Output motions: top layer response spectra (SHAKE)

Output motions: second layer response spectra (SHAKE)

Top layer time history of acceleration (SHAKE)

Second layer time history of acceleration (SHAKE)

Comparison of acceleration and time history relation for the top layer

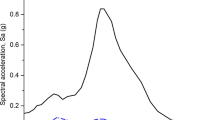
Comparison of acceleration response spectra for the top layer

Comparison of acceleration and time history relation for the second layer
The solution algorithm used in SHAKE assumes viscous soil damping which represents using a complex shear modulus. Viscous damping implies behavior that would be characterized by elliptical stress–strain loops. Because actual stress–strain loops are seldom elliptical, an equivalent damping ratio is used—the equivalent damping ratio is equal to the damping ratio that would be computed based on the area within the hysteresis loop, the secant shear modulus, and the maximum shear strain. The relationship between this equivalent damping ratio and shear strain is characterized by means of a damping curve. Five percent damping ratio is used in this study.
As Table 1 and Figs. 8, 9, and 10 illustrates, equivalent linear approach gives a higher acceleration. The reason of the high acceleration can is explained graphically in Fig. 11 (Kramer 1996). If the solid line in Fig. 11 is a stress–strain curve for the analysis and γmax is a maximum strain, then linear relation used in the equivalent linear analysis is a line OAC. Therefore the shear stress (τ2) at point B is not the peak shear stress that lies on the specified stress–strain curve, but τ1. Similarly, when specified stress–strain curve is a solid line, then the peak stress–peak strain relationship may be expressed to be a dashed line; as it is seen in the figure, the shear stress is always overestimated. As Yoshida (1994) explained, Fig. 11 summarizes the reason why equivalent linear analysis gives larger shear stress than the nonlinear analysis. It should be noted that larger acceleration begins to appear as nonlinear behavior becomes predominant.

The reason why linear approximations exhibit larger shear strain than specified (Kramer 1996)
Summary and conclusions
This paper is an attempt to summarize what is currently known about the linear and nonlinear site response analysis. It began with a general overview on site response analysis. It then goes on to discussions about linear and nonlinear analysis of site response. It finally compares the similarities and differences of linear and nonlinear approaches with a numerical example. Site responses of two layers soil column by using linear and nonlinear solution techniques were analyzed for numerical simulation. Site response analysis results of computer program SHAKE, which is widely used in engineering practice, and a nonlinear method of solution are compared numerically. Previous studies showed that, based on one-dimensional site response analyses, the effect of nonlinear soil behavior is one of the key factors for response spectra. Maximum acceleration distribution along depth and spectrum ratios has proved that equivalent linear analysis calculates larger peak acceleration. Because linear site response analysis calculates acceleration in high frequency range, the method gives higher acceleration. The depth and properties of soil are important parameters in estimating seismic site response. This paper summarized some of the well-known site response analysis methods and compared similarities and differences between linear and nonlinear methods by formulation and implementation of a nonlinear method of site response analysis.
References
Bardet JP, Tobita T (2001) NERA: a computer program for nonlinear earthquake site response analyses of layered soil deposits, Department of Civil Engineering, University of Southern California, Los Angeles, CA, 43 pp
Bardet JP, Ichii K, Lin CH (2000) EERA: a computer program for equivalent–linear earthquake site response analyses of layered soil deposits, Department of Civil Engineering, University of Southern California, Los Angeles, CA, 37 pp
Boatwright J, Fletcher JB, Fumal TE (1991) A general inversion scheme for source, site, and propagation characteristics using multiply recorded sets of moderate-sized earthquakes. Bull Seismol Soc Am 81:1754–1782
Borcherdt RD (1970) Effects of local geology on ground notion near San Francisco Bay. Bull Seismol Soc Am 60:29–81
Borja RI, Chao H-Y, Montans FJ, Lin C-H (1999) Nonlinear ground response at Lotung LSST site. J Geotech Geoenviron Eng 125(3):187–197
Field EH, Jacob KH (1995) A comparison and test of various site-response estimation techniques, including three that are not reference-site dependent. Bull Seism Soc Am 85:1127–1143
Field EH, Johnson PA, Beresnev IA, Zeng Y (1997) Nonlinear ground-motion amplification by sediments during the 1994 Northridge earthquake. Nature 390:599–602
Field EH, Kramer S, Elgamal A-W, Bray JD, Matasovic N, Johnson PA, Cramer C, Roblee C, Wald DJ, Bonilla LF, Dimitriu PP, Anderson JG (1998) Nonlinear site response: where we’re at. Seismol Res Lett 69:230–234
Finn WDL et al (1978) Comparison of dynamic analysis of saturated sand. Proc ASCE GT Spec Conf, pp 472–491
Huang HC, Shieh CS, Chiu HC (2001) Linear and nonlinear behaviors of soft soil layers using Lotung downhole array in Taiwan. Terr Atmos Ocean Sci 12:503–524
Hwang HHM, Lee CS (1991) Parametric study of site response analysis. Soil Dyn Earthq Eng 10(6):282–290
Idriss IM, Sun JI (1992) User’s manual for SHAKE91: a computer program for conducting equivalent linear seismic response analyses of horizontally layered soil deposits. Center for Geotechnical Modelling, Department of Civil and Environmental Engineering, University of California
Iwata T, Irikura K (1988) Source parameters of the 1983 Japan Sea earthquake sequence. J Phys Earth 36:155–184
Joyner WB, Chen ATF (1975) Calculation of nonlinear ground response in earthquakes. Bull Seismol Soc Am 65:1315–1336
Kramer SL (1996) Geotechnical earthquake engineering. In: Prentice-Hall international series in civil engineering and engineering mechanics. Prentice-Hall, New Jersey
Lam I, Tsai CF, Martin GR (1978) Determination of site dependent spectra using nonlinear analysis. In: 2nd international conference on microzonation, San Francisco, CA
Lermo J, Chavez-Garcia FJ (1993) Site effects evaluation using spectral ratios with only one station. Bull Seismol Soc Am 83:1574–1594
Nakamura Y (1988) On the urgent earthquake detection and alarm system (UrEDAS). In: Proceedings of World Conference in Earthquake Engineering
Rodriguez-Marek A, Williams JL, Wartman J, Repetto PC (2003) Southern Peru Earthquake of 23 June, 2001: Ground motions and site response, Earthquake Spectra. 19A:11–34
Schnabel PB, Lysmer J, Seed HB (1972) SHAKE: a computer program for earthquake response analysis of horizontally layered sites. Report No. EERC72-12, University of California, Berkeley
Seed HB, Idriss IM (1970) Soil moduli and damping factors for dynamic response analysis. Report No. EERC70-10, University of California, Berkeley
Seed HB, Whitman RV, Dezfulian H, Dobry R, Idriss IM (1972) Soil conditions and building damage in the 1967 Caracas earthquake. J Soil Mech Found Div ASCE 98:787–806
Yamazaki F, Ansary MA (1997) Horizontal-to-vertical spectrum ratio of earthquake ground motion for site characterization. Earthq Eng Struct Dyn 26:671–689. JSSMFE: 14–31
Yoshida N (1994) Applicability of conventional computer code SHAKE to nonlinear problem. In: Proceedings of symposium on amplification of ground shaking in soft ground
Yoshida N, Iai S (1998) Nonlinear site response analysis and its evaluation and prediction. In: 2nd international symposium on the effect of surface geology on seismic motion, Yokosuka, Japan, pp 71–90
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Arslan, H., Siyahi, B. A comparative study on linear and nonlinear site response analysis. Environ Geol 50, 1193–1200 (2006). https://doi.org/10.1007/s00254-006-0291-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00254-006-0291-4