
Abstract
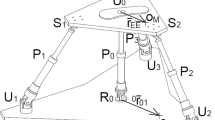
This paper presents a two degree-of-freedom (DOF) planar parallel manipulator with two linear actuators, whose degree of freedom is dependent on a passive constraining leg connecting the base and the platform. The kinematics of the presented manipulator is first studied: the inverse and forward kinematics problems are solved in the closed form, the practical workspace is described symbolically, the Jacobian matrix is derived, and several singular conditions are discussed. Then, in order to determine the geometric parameters and the operating range of the actuators, the optimization of the mechanism is performed considering its dexterity and stiffness.
Article PDF
Similar content being viewed by others


Avoid common mistakes on your manuscript.
References
Ma and J. Angeles, Architecture singularities of platform manipulator, Proc. IEEE Int. Conf. on Robotics and Automation, Sacramento, California, USA. (1991) 1542–1547.
F. Gao, X. Liu and W. A. Gruver, Performance evaluation of two-degree-of-freedom planar parallel robots, Mech. Mach. Theory 33(6) (1998) 661–668.
Frisoli, G. M. Prisco, F. Salsedo and M. Bergamasco, A two degrees-of-freedom planar haptic interface with high kinematic isotropy, Proc. IEEE Int. Works. on Robot and Human Interaction, Pisa, Italy (1999) 297–302.
M. Stock and K. Miller, Optimal kinematic design of spatial parallel manipulators: application to linear delta robot, Tran. ASME J. Mech. Des. 125(2) (2003) 292–301.
Author information
Authors and Affiliations
Corresponding author
Additional information
Ji-Hoon Lee received the B.S. and M.S. degrees from the Department of Mechanical Engineering, Pusan National University. His current research interests are hydraulic and pneumatic control, and haptic system by using smart fluids.
Myeong-Kwan Park received the M.S. and Ph.D. degrees from Tokyo Institute of Technology, Tokyo, Japan. He is currently a full professor with the Department of Mechanical Engineering and a researcher in the Research Institute of Mechanical Technology at Pusan National University.
Rights and permissions
About this article
Cite this article
Lee, JH., Nam, YJ. & Park, MK. Kinematics and optimization of a 2-DOF parallel manipulator with a passive constraining leg and linear actuators. J Mech Sci Technol 24, 19–23 (2010). https://doi.org/10.1007/s12206-009-1114-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-009-1114-9