
Abstract
Purpose
In LCA, a multi-functionality problem exists whenever the environmental impacts of a multi-functional process have to be allocated between its multiple functions. Methods for fixing this multi-functionality problem are controversially discussed because the methods include ambiguous choices. To study the influence of these choices, the ISO standard requires a sensitivity analysis. This work presents an analytical method for analyzing sensitivities and uncertainties of LCA results with respect to the choices made when a multi-functionality problem is fixed.
Methods
The existing matrix algebra for LCA is expanded by explicit equations for methods that fix multi-functionality problems: allocation and avoided burden. For allocation, choices exist between alternative allocation factors. The expanded equations allow calculating LCA results as a function of allocation factors. For avoided burden, choices exist in selecting an avoided burden process from multiple candidates. This choice is represented by so-called aggregation factors. For avoided burden, the expanded equations calculate LCA results as a function of aggregation factors. The expanded equations are used to derive sensitivity coefficients for LCA results with respect to allocation factors and aggregation factors. Based on the sensitivity coefficients, uncertainties due to fixing a multi-functionality problem by allocation or avoided burden are analytically propagated. The method is illustrated using a virtual numerical example.
Results and discussion
The presented approach rigorously quantifies sensitivities of LCA results with respect to the choices made when multi-functionality problems are fixed with allocation and avoided burden. The uncertainties due to fixing multi-functionality problems are analytically propagated to uncertainties in LCA results using a first-order approximation. For uncertainties in allocation factors, the first-order approximation is exact if no loops of the allocated functional flows exist. The contribution of uncertainties due to fixing multi-functionality problems can be directly compared to the uncertainty contributions induced by uncertain process data or characterization factors. The presented method allows the computationally efficient study of uncertainties due to fixing multi-functionality problems and could be automated in software tools.
Conclusions
This work provides a systematic method for the sensitivity analysis required by the ISO standard in case choices between alternative allocation procedures exist. The resulting analytical approach includes contributions of uncertainties in process data, characterization factors, and—in extension to existing methods—uncertainties due to fixing multi-functionality problems in a unifying rigorous framework. Based on the uncertainty contributions, LCA practitioners can select fields for data refinement to decrease the overall uncertainty in LCA results.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Multi-functionality is still one of the most controversial issues of LCA (e.g., Finnveden et al. 2009; Guinée et al. 2011). A multi-functional process causes a multi-functionality problem (also called allocation problem) in LCA whenever environmental impacts have to be partitioned among multiple functions (cf. Curran 2007). Following textbooks on LCA, the most common methods for fixing multi-functionality problems are system expansion, avoided burden, and allocation (cf. Baumann and Tillmann 2004, pp. 34–37, 110–119; Klöpffer and Grahl 2009, pp. 94–123; Guinée et al. 2002, pp. 505–522).
Avoided burden and system expansion are conceptually equivalent (cf. Heijungs and Guinée 2007): Both avoided burden and system expansion select additional processes, which are either added to (system expansion) or subtracted from (avoided burden) the process system. The choice for the LCA practitioner, i.e., selecting a process, is identical for system expansion and avoided burden; however, it always occurs for avoided burden. Therefore, this work studies only avoided burden. Allocation transforms multi-functional unit processes into mono-functional unit processes; the environmental impacts of the multi-functional unit process are then partitioned between the mono-functional unit processes using an allocation principle.
The benefits and disadvantages of these modifications were frequently discussed over the past 15 years (e.g., Frischknecht 1998; Ekvall 1999; Azapagic and Clift 1999; Weidema 2001; Guinée et al. 2002; Curran 2007; Suh et al. 2010). From 1998 on, the ISO standard gave guidelines on how to fix multi-functionality problems in LCA (ISO 2006, pp. 28–32). Still, the ISO standard is criticized (e.g., in Curran 2007, Reap et al. 2008) for its rather vague formulations such as “avoid allocation, if possible” or “use other relationships” (ISO 2006, p. 29). The vague formulations leave choices open how to select processes for system expansion and avoided burden or allocation principles. Therefore, both the EU Commission and the United Nations Environmental Program (UNEP) published guidelines that specify how to select processes for system expansion and avoided burden, and how to choose allocation principles (European Commission 2010, pp. 72–81 and 254–272; UNEP 2011, pp. 78–79). Still, choices remain because multiple candidate processes for avoided burden may exist as well as multiple allocation principles. Therefore, the ISO standard requires that “whenever several alternative allocation procedures seem applicable, a sensitivity analysis shall be conducted […]” (ISO 2006, p. 28).
The influence of “alternative allocation procedures” is acknowledged and studied in many LCA case studies (e.g., Ayer et al. 2007; Bernesson et al. 2004; González-Garcia et al. 2010; Guinée and Heijungs 2007; Guinée et al. 2009; Kaufmann et al. 2010; Luo et al. 2009; Malca and Freire 2006; Nguyen and Hermansen 2012; Sayagh et al. 2010; Svanes et al. 2011; Thrane 2004; Wardenaar et al. 2012). All these authors compare LCA results of scenarios that use alternative allocation principles or alternative processes for system expansion and avoided burden. The influence of the choices due to fixing multi-functionality problems is thus studied using scenario analysis. However, scenario analysis can suffer from ambiguity because the definition of scenarios relies completely on the LCA practitioner and can hardly become an automated part of LCA calculations (Spielmann et al. 2005; Hojer et al. 2008).
In contrast to the influence of allocation procedures, data uncertainties are mostly studied using Monte-Carlo (MC) simulations (Lloyd and Ries 2007). Algorithms for MC simulations are available in LCA software tools. Therefore, MC simulations are often used for analyzing uncertainties in process data or characterization factors (e.g., Geisler et al. 2005; Huijbregts 1998a; Hung and Ma 2009; Lo et al. 2005). The influence or uncertainties due to fixing multi-functionality problems, however, are only integrated in a few studies (e.g., Huijbregts 1998b; Bojarski et al. 2008). These authors combined MC simulations with scenario analysis and acknowledge the influence of uncertainty due to fixing multi-functionality problems in their studies.
However, MC simulations require time-consuming iterations of the LCA calculations (Heijungs 2010). This drawback can be overcome by using analytical uncertainty propagation for uncertainty analysis in LCA. Analytical uncertainty propagation has successfully been applied to LCA calculations, e.g., by Heijungs (1996), Ciroth (2001), Sakai and Yokoyama (2002), Heijungs and Suh (2002, pp. 131–146), Heijungs and Frischknecht (2005), Heijungs (2010), and Hong et al. (2010). Recently, analytical uncertainty propagation has been compared with MC simulations for uncertainty analysis in LCA: Imbeault-Tétrault et al. (2013) confirm that analytical uncertainty propagation requires less computation time than MC simulations and suggest using analytical methods as “somewhat automated” procedure for uncertainty analysis in LCA.
Existing applications of analytical uncertainty propagation focus on uncertainties in process data and characterization factors while uncertainties due to fixing multi-functionality problems are not yet considered in the analytical approach. Heijungs and Kleijn (2001) and Heijungs and Suh (2002, p. 182) suggest integrating parameters such as allocation factors into analytical uncertainty propagation. Applying analytical uncertainty propagation to allocation factors requires explicit equations for calculating LCA results as a function of allocation factors. But such explicit equations are missing so far (Heijungs 2013a).
The aim of this work is deriving explicit equations for calculating LCA results as a function of allocation factors and applying analytical uncertainty propagation to these equations. For this purpose, matrix-based LCA is reviewed in Section 2: the existing equations of the general matrix algebra in LCA are summarized in Section 2.1; fixing multi-functionality problems with allocation and avoided burden in matrix-based LCA without explicit equations is illustrated in Section 2.2; and analytical uncertainty propagation for LCA calculations is described in Section 2.3. In Section 3.1, new explicit equations are derived for calculating LCA results as a function of, e.g., allocation factors. Based on these equations, sensitivity coefficients for LCA calculations with respect to parameters such as allocation factors are derived in Section 3.2. In Section 3.3, parameters such as allocation factors are used to model and propagate uncertainties due to fixing multi-functionality problems with allocation and avoided burden. In Sections 4.1 and 4.2, the approach is illustrated using a virtual example. The outlook in Section 4.3 focuses on the applicability of the presented methods in real life LCA studies. Conclusions complete the paper in Section 5.
2 Review of matrix-based LCA
2.1 General matrix algebra for LCA
Heijungs and Suh (2002) provided a detailed framework for matrix-based LCA calculations. That computational structure and its notation are fundamental for this work and therefore briefly summarized in this section.
The technology matrix A consists of the economic flows of all unit processes included in a LCA study. The functional unit is expressed in a final demand vector f. A scaling vector s is calculated for a given final demand vector f and an invertible technology matrix A from
The elementary flows of all unit processes are collected in the intervention matrix B. The total elementary flows related to a final demand vector f are comprised in the inventory vector g calculated from
The elementary flows are summarized to environmental impact flows in the impact vector h calculated from
The characterization matrix Q contains characterization factors which transform elementary flows to environmental impacts. In this work, we refer to the inventory vector g as life cycle inventory results (LCI results). The impact vector h is called life cycle impact assessment results (LCIA results).
2.2 Fixing multi-functionality problems in matrix-based LCA
Matrix-based calculations of LCA results require an inverted technology matrix A −1 (cf. Eqs. (1) to (3)). The inverse A −1 can always be calculated for a square and non-singular technology matrix A. A multi-functionality problem is characterized by a technology matrix A that cannot be inverted (Heijungs and Frischknecht 1998). Fixing multi-functionality problems with allocation and avoided burden both modify the structure of the technology matrix A so that it becomes invertible. In fact, Heijungs and Frischknecht (1998) showed that the pseudo-inverse can also yield correct LCA results for non-square technology matrices. In this work, however, we discuss the most common case with a square technology matrix A after multi-functionality problems are fixed. Matrix-based allocation and avoided burden are also described on pp. 41–49 in Heijungs and Suh (2002). These authors refer to substitution instead of avoided burden and to partitioning instead of allocation. The illustration of allocation and avoided burden are fundamental for Section 3.1; therefore, they are briefly repeated here using the virtual example from Heijungs and Suh (2002).
2.2.1 An illustrating example
The process flow diagram of a virtual example is shown in Fig. 1.

Process flow diagram for a virtual process system containing four unit processes with five economic flows (Ec1 to Ec5) and three elementary flows (El1 to El3)
The process system consists of five economic flows and four unit processes. The corresponding technology matrix A and intervention matrix B are
The columns represent the unit processes and the rows represent the economic flows (in technology matrix A) and the elementary flows (in the intervention matrix B). We assume that a given functional unit represented by the final demand vector f and a characterization matrix Q is used to calculate three environmental impacts, i.e.,
Process 1 in Fig. 1 is multi-functional because it produces two economic flows Ec2 and Ec3; the technology matrix is A is non-square and cannot be inverted. Moreover, a pseudoinverse does not allow calculation of LCA results from Eqs. (1)–(3). Therefore, a multi-functionality problem exists (cf. Heijungs and Frischknecht 1998).
2.2.2 Allocation in matrix-based LCA
Allocation fixes a multi-functionality problem by transforming multi-functional unit processes into mono-functional unit processes. For the multi-product process 1, both economic input flows and the elementary flows are partitioned to two mono-functional unit processes using an allocation factor C. The allocated technology matrix A allocation of the illustrating example becomes
The matrix A allocation is square and non-singular. LCA results can thus be calculated from Eqs. (1)–(3) using a likewise allocated intervention matrix B allocation, i.e.,
The choice for an allocation factor C can be subject to uncertainties. But even though allocation is implemented in matrix-based software tools such as CMLCA (Heijungs 2013b) or Simapro (Goedkoop et al. 2006), explicit equations for calculating LCA results as a function of an allocation factor C are missing (Heijungs 2013a). Such explicit equations are necessary for analytical sensitivity analysis and propagation of uncertainties. Therefore, explicit equations for calculating LCA results as a function of allocation factors are derived in Section 3.1.1.
2.2.3 Avoided burden in matrix-based LCA
Avoided burden fixes the multi-functionality problem by subtracting environmental impacts of an avoided process. The product(s) of such an avoided process are replaced by one or more products of a multi-functional process that are not required by the final demand vector. In the illustrating example, the final demand vector contains only the second economic flow Ec2 in the technology matrix A. The economic flow Ec2, however, is produced jointly with the third economic flow Ec3 in process 1. An avoided process is thus required producing an economic flow that can be replaced by the third economic flow from process 1. Here, we assume that process 3 in Fig. 1 produces an equivalent economic flow (fourth economic flow Ec4 in technology matrix A) that can be replaced by the third economic flow of process 1. Therefore, the rows of the third and fourth economic flow are merged in both the technology matrix A and the final demand vector f:
Production of the third economic flow in process 1 can now avoid its production in process 3. The environmental impacts from process 3 are therefore avoided. Mathematically, the square technology matrix A burden is now invertible and allows calculating LCA results from Eqs. (1) to (3) using the final demand vector f burden.
A problem arises if there are several candidates for an avoided process. In our example, this could occur if the fourth and the fifth economic flow could both be replaced by the third economic flow. The LCA practitioner has to select between processes 3 and 4 as avoided process. This choice is subject to uncertainty and the consequences are often unknown. This uncertain choice, however, is not modeled in a parameter and thereby also not included in explicit equations for calculating LCA results. A parameter modeling the choice between multiple candidates for an avoided process and explicit equations for calculating LCA results as a function of that parameter are derived in Section 3.1.2.
2.3 Sensitivity analysis and analytical uncertainty propagation for matrix-based LCA
The matrix-based LCA calculations presented in Section 2.1 allow analytical sensitivity analysis. For sensitivity analysis, so-called sensitivity coefficients quantify how an output variable is influenced by a change of an input variable. For small changes of input variables, sensitivity coefficients are first-order partial derivatives of an output variable with respect to an input variable (Morgan and Henrion 1990, p. 174).
In matrix algebra for LCA (cf. Section 2.1), inputs are process data A ij and B vj in the technology matrix A and the intervention matrix B and characterization factors Q uv in the characterization matrix Q. Outputs are the scaling vector s, LCI results g, and LCIA results h. For these outputs, sensitivity coefficients can be derived from Eqs. (1) to (3). As an example, Heijungs and Suh (2002) derived a sensitivity coefficient from Eq. (1) for the influence of technology matrix element A ij on the scaling vector element s k :
Following this approach, Heijungs (2010) presented sensitivity coefficients for LCA outputs such as scaling vectors s k, LCI results g k, and LCIA results h k with respect to input data such as process data A ij , B vj , and characterization data Q kv .
The uncertainty in the input data can be propagated into uncertainties in the outputs using first-order approximations (cf. Morgan and Henrion 1990, p. 185). For LCA computations, Heijungs (2010) expressed the total output uncertainty with the variance and derived analytical equations for variances of LCA results based on his sensitivity coefficients, e.g., for LCI results g k
In this work, the approach of Heijungs (2010) is expanded to include input parameters that model uncertainties due to fixing multi-functionality problems with allocation and avoided burden.
3 Sensitivity analysis and analytical propagation of uncertainties due to fixing multi-functionality problems
In Section 3.1, we derive explicit equations for calculating LCA results as a function of the choices due to fixing multi-functionality problems. Based on these equations, sensitivity coefficients with respect to these choices are derived in Section 3.2. The sensitivity coefficients allow analytical propagation of uncertainties due to fixing multi-functionality (Section 3.3).
We illustrate the construction of the explicit equations in Section 3.1 with the example presented in Section 2.2.1. That example facilitates the understanding of the equations because it contains only one multi-functional unit process (process 1 in Fig. 1) with β = 2 functional flows. However, the equations and methods presented in the entire section apply to any process system given by a (m × n) technology matrix A and a (b × n) intervention matrix B. Additionally, we use a (q × b) characterization matrix Q and a final demand vector f. The process systems may contain any desired number of multi-functional unit processes, i.e., m − n > 1. For process systems with several multi-functional processes, the construction steps are repeated for each multi-functional process.
3.1 Expanded matrix-based equations for fixing multi-functionality problems in LCA
3.1.1 Expanded equations for calculating LCA results as a function of allocation factors
Allocation transforms multi-functional unit processes in the technology matrix A and the intervention matrix B into mono-functional unit processes (cf. Section 2.2.2). Thereby, a (m × n) technology matrix A is transformed into a square (m × m) technology matrix A allocation. An explicit formula realizing this transformation is
In Eq. (6) and throughout this work, the “∘ ” operator represents an entry-wise matrix product. Equation (6) uses three new matrices: a copying matrix T 1, a function matrix U, and an allocation matrix C. The meaning and construction of these matrices is explained in the following paragraph using the illustrating example from Section 2.2.2.
The transformation matrix T 1 copies columns which represent multi-functional unit processes in the technology matrix A. The construction of the (n × (n + β)) transformation matrix T 1 is straightforward from the (m × n) technology matrix A: The transformation matrix T 1 is a (n × n) identity matrix expanded by a total number of β columns, where β is the number of functional flows of the multi-functional unit process. The expanded columns contain zeros except for the row that corresponds to the column of the multi-functional unit process in the technology matrix A: The entry in that row is one. The matrix–product A · T 1 yields a matrix where the column of a multi-product process is copied β times.
For the illustrating example, the multi-product process is in the first column of the technology matrix and has β = 2 products; thus, the transformation matrix T 1 and the matrix product A · T 1 of the illustrating example are
The function matrix U creates mono-functional unit process from the copied columns in A · T 1. For this purpose, the (m × (n + β)) function matrix U has the same dimension as the product A · T 1 and is directly constructed from this product. The column vectors of U that correspond to the duplicated columns (here columns 2 and 3 in A · T 1) have only a single one-entry. These one-entries define the (mono-) functional flows in each duplicated column. The one-entries are in rows that correspond to the functional flows of the multi-functional unit process (here rows 2 and 3 in A · T 1). In contrast, the column vectors of U that corresponds to the original multi-product process (here column 1) has zeros in the rows of the functional flows and ones elsewhere. All other elements of U are ones. The illustrating example yields a function matrix U and the matrix product U ∘ (A ⋅ T 1):
The economic and elementary flows of the multi-functional unit process can be allocated to the mono-functional unit process by multiplying the matrix U ∘ (A ⋅ T 1) by an allocation matrix C. The allocation matrix C contains the allocation factors C pq . The ((n + β) × m) allocation matrix C is constructed from a (m × m) identity matrix that is expanded by one row for every multi-functional process of the considered system. The rows of the allocation matrix C correspond to the columns of the product A · T 1. The expanded row vectors of C (here row 1 of C) correspond to the original multi-functional process columns of A · T 1 (here column 1 of A · T 1) and contain the allocation factors C pq (here C 11 = C and C 12 = 1 − C 11 = 1 − C). The allocation matrix C of the illustrating example and the product (U ∘ (A ⋅ T 1)) ⋅ C becomes
The corresponding (b × m) intervention matrix B allocation is obtained from
In contrast to the copying matrix T 1, the expanded columns of copying matrix T 0 contain only zeros. For the illustrating example, T 0 is given by:
The equations for the technology matrix A allocation and the intervention matrix B allocation in Eqs. (6) and (7) can be inserted in Eqs. (1) to (3). Thereby, LCA results can be calculated as function of allocation factors comprised in the allocation matrix C.
3.1.2 Expanded equations for calculating LCA results as a function of avoided burden
Avoided burden requires merging rows of equivalent economic flows in the technology matrix A and the final demand vector f (cf. Section 2.2.4). For this purpose, the LCA practitioner has to select an avoided process that provides an equivalent economic flow. In this work, the choice between multiple candidates for an avoided process is modeled by aggregating candidate processes for an avoided process into a single avoided process: The idea is to replace the set of candidate avoided processes by a mix of weighted candidate processes. The weighting factors quantifying the contribution of each candidate process are called aggregation factors to avoid confusion with weighting factors used during life cycle impact assessment. Thereby, the discrete selection among candidate processes is turned into specifying aggregation factors. The aggregation factors are continuous variables which can be used for sensitivity and uncertainty analysis.
Avoided burden transforms a (m × n) technology matrix A into modified to a square (r × r) technology matrix A burden wherein rows of equivalent economic flows are merged and candidate processes for an avoided process are aggregated. An explicit formula for the transformation is
Equation (8) uses two new matrices: an equivalence matrix E and an aggregation matrix V. The multiplication of the technology matrix A by the equivalence matrix E merges rows of equivalent economic flows. The multiplication of the technology matrix A by the aggregation matrix V aggregates candidate processes for an avoided process. The construction of both the equivalence matrix E and the aggregation matrix V is described in the following paragraphs using the illustrating example from Section 2.2.2.
The (r × m) equivalence matrix E is directly constructed from the technology matrix A. The columns of the equivalence matrix E correspond to the rows (i.e., economic flows) of the technology matrix A. Every column vector of E has a single one-entry. Equivalent economic flows of the technology matrix A have one-entries in the same row of the equivalence matrix E. The rows of the matrix E represent equivalent economic flows. For illustration, we assume that economic flows Ec3, Ec4, and Ec5 (Fig. 1) of the technology matrix A are equivalent. Thereby, process 3 and process 4 in Fig. 1 are candidates for an avoided process. The equivalence matrix E and the matrix product E ⋅ Aare
The (n × r) equivalence matrix V is constructed from an initial (n × n) identity matrix. For the aggregation of a total number of α candidate processes, (α-1) columns in the initial identity matrix are deleted. The rows of the aggregation matrix V correspond to the columns (i.e., processes) of the technology matrix A. The column vectors of the aggregation matrix V correspond to the rows (i.e., the equivalent products) of the equivalence matrix E. The aggregation factors of the candidate processes are in columns of V that correspond to a row in E that includes more than two equivalent products, i.e., the row sum is greater than 2.
For the illustrating example, one column is deleted from the initial (4 × 4) identity matrix. The aggregation factor V 33 = V for process 3 is in the third row and the factor V 43 = 1 − V for process 4 is in the fourth row of the aggregation matrix V. The aggregation matrix V and the matrix product E · A · V are
Equivalent economic flows have to be merged in the final demand vector f as well. For this purpose, the final demand vector f is also multiplied by the equivalence matrix E, i.e.,
The aggregation of candidate processes has to be applied to the elementary flows in the intervention matrix B as well. For this purpose, the intervention matrix B is also multiplied by the aggregation matrix V, i.e.,
The equations for the technology matrix A burden, the intervention matrix B burden, and the final demand vector f burden in Eqs. (8) to (10) can be inserted in Eqs. (1) to (3). Thereby, LCA results can be calculated as function of aggregation factors comprised in the aggregation matrix V.
3.1.3 Summary of expanded equations for matrix-based LCA calculations
The equations presented in the previous sections allow calculating LCA results as a function of allocation factors C pq and aggregation factors V jl . The equations for allocation and avoided burden are derived separately to facilitate understanding of the construction of the new matrices. In real LCA studies, however, multiple multi-functionality problems can be fixed with different methods. For this case, the equations derived in Sections 3.1.1 and 3.1.2 are combined into one set of equations. The construction procedures described in the previous sections can be executed repeatedly for each multi-functionality problem.
Combining Eqs. (6) and (8) in Eq. (1) allows calculating a scaling vector s as a function of allocation factors C pq and aggregation factors V jl from
Consequently, explicit equations for the calculation of LCI results g and LCIA results h are
and
All matrices used in Eqs. (11) to (13) are summarized in Table 1. Equations (11) to (13) expand the existing matrix-based equations for LCA calculations by including allocation factors and aggregation factors for fixing multi-functionality problems with allocation and avoided burden. To study the influence of changes in these allocation and aggregation factors, sensitivity coefficients are derived from Eqs. (11) to (13) in the following section.
3.2 Sensitivity analysis for fixing multi-functionality problems
Sensitivity analysis can be performed by calculating partial derivatives of LCA results with respect to given input parameters. The partial derivatives are also called sensitivity coefficients (Heijungs 2010). In this section, we derive sensitivity coefficients \( \frac{\partial }{\partial {C}_{pq}} \) with respect to allocation factors C pq and sensitivity coefficients \( \frac{\partial }{\partial {V}_{jl}} \) with respect to aggregation factors. The coefficients \( \frac{\partial }{\partial {C}_{pq}} \) are a systematic measure for the influence of selecting an allocation principle to fix a multi-functionality problem. Sensitivity coefficients \( \frac{\partial }{\partial {V}_{jl}} \) are a measure for the influence of selecting between candidates for an avoided process used to fix a multi-functionality problem with avoided burden.
The derivation of the sensitivity coefficients applies basic matrix algebra. Most fundamentally, the derivative of a (α × β) matrix Z with respect to a matrix element Z xy is
Here, J xy (α×β) is a single-entry matrix with J xy = 1 while all other elements are zero. For a square and invertible (α × α) matrix Z, the derivative of the inverted matrix Z −1 with respect to the matrix elements Z xy is
More detailed explanations of matrix algebra can be found in Petersen and Pedersen (2008) and Magnus and Neudecker (2007, pp. 3–74).
As indicated in Eqs. (11)–(13), a technology matrix A that is modified with both allocation and avoided burden is denoted A fixed, i.e.,
The corresponding intervention matrix B fixed is
3.2.1 Sensitivity analysis for allocation
A partial derivative of Eq. (11) with respect to an allocation factor C pq gives a vector of sensitivity coefficients \( \frac{\partial \mathbf{s}}{\partial {C}_{pq}}: \)
The vector \( \frac{\partial \mathbf{s}}{\partial {C}_{pq}} \) contains sensitivity coefficients for all elements of a scaling vector s with respect to an allocation factor C pq . The corresponding vectors of sensitivity coefficients for LCI results g and LCIA results h are calculated from the partial derivatives of Eqs. (12) and (13), i.e.,
and
In Eqs. (19) and (20), the matrix I (w+β)×(w+β)denotes a (w + β) × (w + β) identity matrix.
3.2.2 Sensitivity analysis for avoided burden
A partial derivative of Eq. (11) with respect to an aggregation factor V jl gives a vector of sensitivity coefficients \( \frac{\partial \mathbf{s}}{\partial {V}_{jl}} \):
The vector \( \frac{\partial \mathbf{s}}{\partial {V}_{jl}} \) contains sensitivity coefficients for all elements of a scaling vector s with respect to an allocation factor V jl . The corresponding vectors of sensitivity coefficients for LCI results g and LCIA results h are calculated from the partial derivatives of Eqs. (12) and (13), i.e.,
and
3.3 Analytical propagation of uncertainties due to fixing multi-functionality problems in LCA
In this work, we expand the approach of Heijungs (2010) to include uncertainties in allocation and aggregation factors. For this purpose, we provide a method for analytical propagation of uncertainties in allocation and aggregation factors. Uncertainties in allocation and aggregation factors represent uncertainties due to fixing multi-functionality problems with allocation or avoided burden. The prerequisites are derived in the previous Sections 3.1 and 3.2: explicit equations for calculating LCA results as a function of allocation and aggregation factors (Eqs. (11) to (13)) and equations for sensitivity coefficients with respect to allocation and aggregation factors (Eqs. (18) to (23)).
The total variance var (y) of an output y = f(x 1, …, x n ) can be approximated using a first-order approximation (cf. Morgan and Henrion 1990, p. 185), i.e.,
The variance of a parameter x can be computed from its standard deviation σ x
In this work, we follow Heijungs (2010) in applying Eq. (24) to calculate the variance of an impact vector element h k following Eq. (13). Heijungs (2010) included input uncertainties in process data (elementary flows in the intervention matrix B and economic flows in the technology matrix A) and uncertainties in characterization factors (in the characterization matrix Q).
In this work, we additionally include uncertainties in allocation factors (in the allocation matrix C) and uncertainties in aggregation factors (in the aggregation matrix V). The first-order approximation of the variance of an impact vector element h k is thus
The partial derivatives \( \frac{\partial {h}_k}{\partial {C}_{pq}} \) and \( \frac{\partial {h}_k}{\partial {V}_{jl}} \) can be obtained from element-wise evaluation of Eqs. (20) and (23). The partial derivatives \( \frac{\partial {h}_k}{\partial {Q}_{kv}} \), \( \frac{\partial {h}_k}{\partial {A}_{ij}} \), and \( \frac{\partial {h}_k}{\partial {B}_{vj}} \) can be derived from Eq. (13). They are identical to the expressions discussed by Heijungs (2010) if the matrices in that publication are replaced by the expanded matrices A fixed and B fixed presented in Section 3.1. The “0-1” sparsity patters of the matrices T 0, T 1, U, and E is constant for a given study. Therefore, uncertainties in matrix elements of those matrices are not considered in Eq. (26).
In Eq. (26), the first term ζ(Q) quantifies the contribution of uncertainty in characterization factors. The contributions of uncertainties in process data, i.e., elementary flows B vj and economic flows A ij , are denoted ζ(B) and ζ(A), respectively. For these three parameter types, we follow Heijungs (2010) and neglect correlations because covariance data is hardly available for these data and in general difficult to obtain (Morgan and Henrion 1990, pp. 122–123).
In contrast, the contributions of uncertainties in allocation factors ζ(C) and in aggregation factors ζ(V) include the covariance between allocation factors C pq and between aggregation factors V jl . Both allocation and aggregation factors are correlated: The ISO standard (2006, p. 28) requires that the sum of allocated environmental impacts equal the impacts from the multi-functional unit process. The requirement is met if the sum of all allocation factors used for each allocation procedure is 1, i.e.,
The environmental impacts of an aggregated avoided process should be equal to the sum of impacts from the candidate processes weighted with the aggregation factors. Therefore, the sum of aggregation factors used for each aggregation procedure is 1, i.e.,
For the common case of allocating between two functional flows (i.e., two allocation factors C pq and C p(q+1)) or aggregating two candidate processes (i.e., two aggregation factors V jl and V (j+1)l ), Eqs. (27) and (28) can be used to directly implement the covariance in Eq. (26). For this purpose, one allocation factor C p(q+1) is replaced by (1 − C pq ) and likewise V (j+1)l = 1 − V jl . The resulting simpler explicit expressions are presented in the electronic supplementary material 2 and 3.
The applicability of Eq. (26) to analyze uncertainties due to fixing multi-functionality problems is discussed in the following section.
4 Application to the illustrating example and discussion
In this section, the analytical approach for analysis of sensitivities (Section 3.2) and uncertainties (Section 3.3) due to fixing multi-functionality problems is applied to the illustrating example given in Section 2.2.1. Thereby, features and limitations are discussed for both sensitivity analysis (Section 4.1) and uncertainty analysis (Section 4.2). Opportunities for further development are provided in Section 4.3.
4.1 Sensitivity analysis
4.1.1 Sensitivity analysis with respect to allocation factors
One way to fix the multi-functionality problem in the illustrating example is allocation (Sections 2.2.2 and 3.1.1). For this case, Eq. (13) allows calculating LCIA results h k as a function of the allocation factor C 11 = 1 − C 12as shown in Fig. 2.

LCIA results h k as a function of allocation factor C 11 = 1 − C 12 for technology matrix A
The three virtual impacts h 1 , h 2 , and h 3 increase linearly with the allocation factor C 11 (Fig. 2). The corresponding sensitivity coefficients \( \frac{\partial {h}_k}{\partial {C}_{11}} \) are constant for all values of C 11 and do not depend on C 12, i.e.,
But sensitivity coefficients with respect to allocation factors are not constant in general. This is demonstrated by modifying process data A ij . A loop of the allocated functional flow Ec3 is introduced by changing A 32 = 0 to A 32 * = − 700; the corresponding technology matrix A *is
Here, the economic flow Ec3 is produced by process 1 and required by process 2 while the economic flow Ec1 is required by process 1 and produced by process 2. For this example, LCIA results h k * do not depend linearly on the allocation factor C 11 = 1 − C 12 as shown in Fig. 3. Now, the sensitivity coefficients \( \frac{\partial {h}_k^{\ast }}{\partial {C}_{11}} \) depend on C 11, e.g.,

LCIA results h k * as a function of the allocation factor C 11 = 1 − C 12 for technology matrix A*
Thus, the sensitivity coefficients quantify the reduced sensitivity of the results with increasing values of the allocation factor C 11.
The findings from the numerical example can be generalized. In fact, LCA results depend always linearly on the allocation factor, if no loops of allocated functional flows exist. A general proof is provided in the electronic supplementary material 1. The use of this information is further discussed in Section 4.2.1 where uncertainties in allocation factors are analyzed and propagated using the method presented in Section 3.3.
4.1.2 Sensitivity analysis with respect to aggregation factors
The multi-functionality problem in the illustrating example can also be fixed with avoided burden (cf. Section 2.2.3). Multiple candidates for an avoided process can be aggregated into a single avoided burden process (cf. Section 3.1.2). For that case, the LCIA results h k depend on the aggregation factor (cf. Eq. 13). In the illustrating example, process 3 and 4 (cf. Fig. 1) are aggregated. The LCIA results h k are shown as a function of the aggregation factor V 33 = 1 − V 43 in Fig. 4. Here, the environmental impacts h k for V 33 = 1 represent a scenario wherein only process 3 is used as avoided burden process. Impacts for V 33 = 0 model a scenario wherein only process 4 is used as avoided burden because V 33 = 1 − V 43.

LCIA results h k as a function of aggregation factor V 33 = 1 − V 43 for technology matrix A
Studying the sensitivity coefficients \( \frac{\partial {h}_k}{\partial {V}_{33}} \) allows distinguishing impact categories that are strongly influenced by the choice among the two candidates for the avoided process, e.g.,
Here, the results in the impact categories h 1 and h 3 are more influenced by the choice among processes 3 and 4 than impact category h 2. Sensitivity coefficients such as \( \frac{\partial {h}_k}{\partial {V}_{33}} \) could be calculated automated in software tools whenever LCA practitioners have to choose from multiple candidate processes for an avoided burden process.
In the following section, uncertainty analysis following Section 3.3 is applied to the illustrating example.
4.2 Uncertainty analysis
4.2.1 Analysis of uncertainties in allocation factors
The sensitivity coefficients calculated from Eq. (20) can be used for analytical propagation of uncertainties in allocation factors following Eq. (26). Thereby, the contribution of uncertainty in allocation factors to the overall uncertainty in an LCIA result h k can be approximated and compared to the contributions of uncertainties in, e.g., process data or characterization factors. For illustration, this method is applied to the example given in Sections 2.2.1 and 3.1.1.
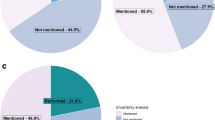
For this purpose, we assume that characterization factors Q kv and process data A ij and B vj of the virtual example have a relative standard deviation of 5 %, i.e., σ(Q kv ) = 0.05 ⋅ Q kv ,σ(A ij ) = 0.05 ⋅ A ij , and σ(B vj ) = 0.05 ⋅ B vj . Moreover, we use two arbitrary parameterized allocation factors C 11 = 0.36 and C 12 = 1 − C 11 = 0.64. The standard deviation of these allocation factors is assumed to be σ(C 11) = σ(C 12) = 0.05. The variances of all input parameters Q kv , A ij , B vj , and C pq are calculated from Eq. (25) and used to propagate the corresponding uncertainties in those input parameters to the uncertainty of the LCIA results h k (Eq. (26)). The LCIA results h k , the corresponding standard deviations σ(h k ), and variances var (h k ) are shown in Table 2. Moreover, the contributions of uncertainties in characterization factors ζ(Q), in process data ζ(B) and ζ(A), and in allocation factors ζ(C) calculated from Eq. (26) are also displayed in Table 2.
The contribution of uncertainty in allocation factors ζ(C) is large (60.8–74.5 %) in this virtual example. For LCA with real data, further data refinement of characterization factors Q kv , process data A ij and B vj would decrease overall uncertainty, but the uncertainty in the allocation factors still dominates the uncertainty of LCIA results. That information supports the LCA practitioner in selecting meaningful processes for data refinement.
In the example above, the uncertainty in the allocation factors was chosen arbitrarily for illustration. In a real case study, the uncertainty in allocation factors should be chosen in a way that it reflects the uncertainty due to the choice of selecting an allocation factor. For this purpose, the sample variance of the sample mean of alternative allocation factors could be used in Eq. (26). Equation (26) then quantifies the contribution of the uncertainty in selecting one out of several possible allocation principles.
A second potential application for Eq. (26) concerns economic allocation (Guinée et al. 2004): Economic allocation is sometimes criticized because economic allocation factors are derived from potentially fluctuating market prices (Ardente and Cellura 2012; Pelletier and Tyedmers 2011; Weinzettel 2012; Pelletier and Tyedmers 2012). The uncertainty due to using a constant economic allocation factor can be quantified with Eq. (26). For this purpose, the uncertainty in an allocation factor can be calculated from the sample variance of a set of fluctuating allocation factors. The contribution of uncertainty in economic allocation factors then represents the volatility of economically allocated impacts h k with respect to fluctuating market prices.
In any case, it is necessary to bear in mind that a first-order Taylor approximation was used for Eq. (26). In general, the propagation of uncertainties in allocation factors is thus only a good approximation if the uncertainties in allocation factors are small. But the first-order approximation in Eq. (26) is exact for linear functional relationships (cf. Morgan and Henrion (1990), p. 186). For the virtual example, the LCIA results h k are a linear function of the allocation factors (Fig. 2). In general, LCIA results h k depend linearly on allocation factors if the allocated functional flows are not re-used in a loop in their own process system (cf. Section 4.1.1). A proof for this statement is provided in the electronic supplementary material 1. In this case, the proposed method to propagate uncertainties in allocation factors into uncertainties in LCIA results is thus exact.
For nonlinear relationship between LCIA results and allocation factors, higher order instead of first-order approximations could improve the accuracy of the uncertainty propagation in Eq. (26). Ciroth et al. (2004) already demonstrated that such higher order approximations can be used to propagate uncertainties in nonlinear LCA calculations more precisely. Therefore, future work could investigate the applicability of higher order approximations to matrix-based LCA calculations with nonlinear relationships. However, the higher accuracy of higher order approximations has to be compared with regard to the increased computational effort: The higher order partial derivatives become much more complicated than Eqs. (18) to (20).
4.2.2 Analysis of uncertainties in aggregation factors
The sensitivity coefficients calculated from Eq. (23) can be used to propagate uncertainties in aggregation factors following Eq. (26). Thereby, the contribution of uncertainty due to selecting an avoided process can be approximated and compared to the contributions of uncertainties in, e.g., process data or characterization factors. For illustration, this method is applied to the example given in Sections 2.2.1 and 3.1.2.
As in the previous section, we assume standard deviations of 5 % for characterization factors Q kv and process data A ij and B vj , i.e., σ(Q kv ) = 0.05Q kv , σ(A ij ) = 0.05A ij , and σ(B vj ) = 0.05B vj . The standard deviation of the aggregation factors V 33 and V 43 is arbitrarily assumed to σ(V 33) = σ(V 43) = 0.05. The LCIA results h k , the corresponding standard deviations σ(h k ), and variances var (h k ) are shown in Table 3. Moreover, the contributions of uncertainties in characterization factors ζ(Q), in process data ζ(B) and ζ(A), and in allocation factors ζ(V) calculated from Eq. (26) are also displayed in Table 3.
The aggregation factor uncertainty contributes strongest to the uncertainty of the result in impact categories h 2 (25.1 %). In contrast, for impact category h 3, the uncertainty of choosing between the alternative avoided burden processes p 3 and p 4 does barely contribute to the total variance of h 3. Refinement of process data in the technology matrix A would be advisable to reduce uncertainty in the impact category h 3 because uncertainty in process data A ij contributes 80.8 % (Table 3). For the impact categories h 1 and h 2, data refinement of process data in both the technology matrix A and the intervention matrix B can help reducing the result uncertainty (ζ(B) and ζ(A) contribute between 28 and 43.1 %).
In a real LCA study, it is necessary to specify the variance of the aggregation factors for evaluation of Eq. (26). For the choice between multiple candidates for the avoided burden process, sets of aggregation factors could be created with each set having exactly one aggregation factor V jl = 1 and all others zero. The sample variance for the mean aggregation factors of these sets could be used in Eq. (26).
The uncertainty in an aggregation factor can also be interpreted as the uncertainty due to fluctuating compositions of a mix process (e.g., country-specific electricity mix). Uncertainty is introduced whenever the mix composition is not constant and changes over time but a constant mix is used for LCA calculations. This uncertainty can be modeled using a sample variance of a set of mix compositions.
For analysis of uncertainties in aggregation factors, the considerations concerning the accuracy of the first-order approximation in Eq. (26) discussed in Section 4.2.1 apply. Here, however, LCIA results do not depend linearly on aggregation factors; the smoothness of LCIA results as a function of aggregation factors can however be studied using Eq. (13).
4.3 Outlook on future applications
Equation (26) propagates uncertainties in allocation and aggregation factors into uncertainties in LCA results. Even though the mathematical equations look complicated (cf. Eqs. (18) to (23)), they do not require any additional matrix inversion compared to calculating LCA results (cf. Eqs. (11) to (13)). Therefore, it is expected that the presented approach is computationally more efficient than MC simulations. This, however, should be demonstrated using a real LCA study instead of a virtual example. The recent comparison of analytical uncertainty propagation with MC simulations for uncertainties in process data and characterization factors (Imbeault-Tétrault et al. 2013) could therefore be expanded for uncertainties in allocation factors and in aggregation factors.
An application of the method presented in this work should include a larger process system with multiple multi-functional processes. Thereby, the influence of allocation factors for multiple processes can be compared to each other. To be tested with larger process systems, the presented approach could be implemented in matrix-based software tools such as CMLCA (Heijungs 2013b). It could then be used as a systematic method to meet the ISO standard requirement that “whenever several alternative allocation procedures seem applicable, a sensitivity analysis shall be conducted […]” (ISO 2006, p. 28).
In this work, we showed that the first-order approximation of uncertainties in allocation factors is exact if no loops of allocated functional flows exist (cf. electronic supplementary material 1). Future work should investigate the accuracy of the first-order approximations for nonlinear relationships between LCA results and allocation or aggregation factors. An approach could be to compare the uncertainty calculated with a first-order approximation to the uncertainty calculated with MC simulations for several sets of LCA results that represent alternative allocation factors. In case that the uncertainties calculated with the first-order approximation differ strongly from the uncertainties calculated with MC simulations, higher order approximations could be tested such as in Ciroth et al. (2004).
Another opportunity for future research is to investigate correlations between process data and allocation factors. Allocation factors are often derived from mass flows (cf. Klöpffer and Grahl 2009, pp. 103–104). Mass flows are typically comprised in the technology matrix A. Therefore, allocation factors based on mass flows could be expressed as functions of process data A ij . The equations derived in Section 3.1 can be the basis for future studies of the relationship between process data and allocation factors.
5 Conclusions
Methods for fixing multi-functionality problems are controversially discussed. The influence of fixing multi-functionality problems on LCA results is widely acknowledged. The ISO standard requires a sensitivity analysis if alternative procedures for fixing multi-functionality problems exist. This work provides an analytical matrix-based method for the sensitivity analysis required by the ISO standard.
This work discusses uncertainties in two practically relevant fixing methods: allocation and avoided burden. The choices within each method are represented by continuous parameters: allocation factors for allocation and aggregation factors for avoided burden. Expanded, newly developed matrix equations allow analytical propagation of uncertainties in these parameters. Uncertainties due to fixing multi-functionality problems were so far mostly analyzed with scenario analyses or MC simulations. In contrast to MC simulations, the presented approach seems computationally more efficient. Compared to scenario analyses, the analytical method could be automated in a software tool and thereby allow a direct analysis of uncertainties due to fixing multi-functionality problems. Future work should apply the presented approach to real LCA studies with larger process systems. Moreover, the analytical approach should be compared to MC simulations and scenario analysis with regard to computational effort, input required by the LCA practitioner, and information acquired.
It is hard to imagine that the uncertainty due to fixing multi-functionality problems in LCA will be reduced by more strict guidelines in the future. Quantifying the contribution of these uncertainties to the total result uncertainty therefore remains essential for the transparency of LCA results. The presented method could provide an analytical framework for uncertainty analysis in LCA including uncertainties due to fixing multi-functionality problems.
References
Ardente F, Cellura M (2012) Economic allocation in life cycle assessment. J Ind Ecol 16(3):387–398
Ayer NW, Tyedmers PH, Pelletier NL, Sonesson U, Scholz A (2007) Co-product allocation in life-cycle assessments of seafood production systems: review of problems and strategies. Int J Life Cycle Assess 12(7):480–487
Azapagic A, Clift R (1999) Allocation of environmental burdens in multiple-function systems. J Clean Prod 7(2):101–119
Baumann H, Tillmann AM (2004) The hitch hiker's guide to LCA. An orientation in LCA methodology and application. Lund, Studentlitteratur
Bernesson S, Nilsson D, Hansson P (2004) A limited LCA comparing large- and small-scale production of rape methyl ester (rme) under Swedish conditions. Biomass Bioenerg 26(6):545–559
Bojarski AD, Guillen-Gosalbez G, Jimenez L, Espuna A, Puigjaner L (2008) Life-cycle assessment coupled with process simulation under uncertainty for reduced environmental impact: application to phosphoric acid production. Ind Eng Chem Research 47(21):8286–8300
Ciroth A (2001) Fehlerrechnung in Ökobilanzen. PhD thesis (in German). Technical University of Berlin
Ciroth A, Fleischer G, Steinbach J (2004) Uncertainty calculation in life cycle assessments. Int J Life Cycle Assess 9(4):216–226
Curran MA (2007) Co-Product and input allocation approaches for creating life cycle inventory data: a literature review. Int J Life Cycle Assess 12 (Special Issue 1) 65–78
Ekvall T (1999) System expansion and allocation in life cycle assessment. PhD thesis. Chalmers University of Technology, Sweden
European Commission–Joint Research Centre–Institute for Environment and Sustainability (2010) International Reference Life Cycle Data System (ILCD) handbook—general guide for life cycle assessment—detailed guidance. 1st edition. EUR 24708 EN. Publications Office of the European Union, Luxembourg
Finnveden G, Hauschild MZ, Ekvall T, Guinée JB, Heijungs R, Hellweg S, Koehler A, Pennington D, Suh S (2009) Recent developments in life cycle assessment. J Environ Manage 91(1):1–21
Frischknecht R (1998) Life cycle inventory analysis for decision-making: scope-dependent inventory system models and context-specific joint product allocation. Ph.D. thesis, Energy Technology Department, ETH Zurich, Zurich, Switzerland
Geisler G, Hellweg S, Hungerbühler K (2005) Uncertainties in LCA of plant-growth regulators and implications on decision-making. Int J Life Cycle Assess 10(3):184–192
Goedkoop M, Schryver AD, Oele M (2006) Introduction to LCA with Simapro 7. Technical report, PRé Consultants. Available online: http://www.pre-sustainability.com/manuals. Last accessed 10 May 2013
González-Garcia S, Moreira MT, Feijoo G (2010) Comparative environmental performance of lignocellulosic ethanol from different feedstocks. Renew Sust Energ Rev 14(7):2077–2085
Guinée JB, Gorrée M, Heijungs R, Huppes G, Kleijn R, de Koning A, van Oers LFCM, Wegener Sleeswijk A, Suh S, de Haes HAU, de Bruijn H, van Duin R, Huijbregts MAJ (2002) Handbook on life cycle assessment: operational guide to the ISO standards. Kluwer, Dordrecht
Guinée JB, Heijungs R, Huppes G (2004) Economic allocation: examples and derived decision tree. Int J Life Cycle Assess 9(1):23–33
Guinée JB, Heijungs R (2007) Calculating the influence of alternative allocation scenarios in fossil fuel chains. Int J Life Cycle Assess 12(3):173–180
Guinée JB, Heijungs R, van der Voet E (2009) A greenhouse gas indicator for bioenergy: some theoretical issues with practical implications. Int J Life Cycle Assess 14(4):328–339
Guinée JB, Heijungs R, Huppes G, Zamagni A, Masoni P, Buonamici R, Ekvall T, Rydberg T (2011) Life cycle assessment: past, present, and future. Environ Sci Technol 45(1):90–96
Heijungs R, Frischknecht R (1998) A special view on the nature of the allocation problem. Int J Life Cycle Assess 3(6):321–332
Heijungs R, Frischknecht R (2005) Representing statistical distributions for uncertain parameters in LCA. Relationships between mathematical forms, their representation in ecospold, and their representation in CMLCA. Int J Life Cycle Assess 10(4):248–254
Heijungs R, Guinée JB (2007) Allocation and “what-if” scenarios in life cycle assessment of waste management systems. Waste Manage 27(8):997–1005
Heijungs R, Kleijn R (2001) Numerical approaches towards life cycle interpretation—five examples. Int J Life Cycle Assess 6(3):141–148
Heijungs R, Suh S (2002) The computational structure of life cycle assessment. Kluwer, Dordrecht
Heijungs R (1996) Identification of key issues for further investigation in improving the reliability of life-cycle assessments. J Clean Prod 4(3–4):159–166
Heijungs R (2010) Sensitivity coefficients for matrix-based LCA. Int J Life Cycle Assess 15(5):511–520
Heijungs R (2013a) personal communication. January 24th 2013
Heijungs R (2013b) CMLCA software. http://www.cmlca.eu/. Last accessed 10 May 2013
Hojer M, Ahlroth S, Dreborg KH, Ekvall T, Finnveden G, Hjelm O, Hochschorner E, Nilsson M, Palm V (2008) Scenarios in selected tools for environmental systems analysis. J Clean Prod 16(18):1958–1970
Hong J, Shaked S, Rosenbaum RK, Jolliet O (2010) Analytical uncertainty propagation in life cycle inventory and impact assessment: application to an automobile front panel. Int J Life Cycle Assess 15(5):499–510
Huijbregts M (1998a) Application of uncertainty and variability in LCA, part 1. Int J Life Cycle Assess 3(5):273–280
Huijbregts M (1998b) Application of uncertainty and variability in LCA, part 2. Int J Life Cycle Assess 3(6):343–351
Hung ML, Ma HW (2009) Quantifying system uncertainty of life cycle assessment based on Monte Carlo simulation. Int Int J Life Cycle Assess 14(1):19–27
Imbeault-Tétrault H, Jolliet O, Deschênes L, Rosenbaum RK (2013) Analytical propagation of uncertainty in life cycle assessment using matrix formulation. J Ind Ecol 17(4):485–492
ISO (2006) ISO 14044: environmental management—life cycle assessment—requirement and guidelines. International Organisation for Standardisation, Brussels
Kaufmann AS, Meier PJ, Sinistore JC, Reinemann DJ (2010) Applying life-cycle assessment to low carbon fuel standards—how allocation choices influence carbon intensity for renewable transportation fuels. Energ Policy 38(9):5229–5241
Klöpffer W, Grahl B (2009) Ökobilanz (LCA). Wiley-VCH, Weinheim (in German)
Lo SC, Ma HW, Lo SL (2005) Quantifying and reducing uncertainty in life-cycle assessment using the Bayesian Monte Carlo method. Sci Total Environ 340(1–3):23–33
Lloyd S, Ries R (2007) Characterizing, propagating and analyzing uncertainty in life cycle assessment: a survey of quantitative approaches. J Ind Ecol 11(1):161–179
Luo L, van der Voet E, Huppes G, Haes UH (2009) Allocation issues in LCA methodology: a case study of corn stover-based fuel ethanol. Int J Life Cycle Assess 14(6):529–539
Magnus JR, Neudecker H (2007) Matrix differential calculus with applications in statistics and economics. Wiley, Chichester
Malca J, Freire F (2006) Renewability and life-cycle energy efficiency of bioethanol and bio-ethyl tertiary butyl ether (bioETBE): assessing the implications of allocation. Energy 31(15):3362–3380
Morgan MG, Henrion M (1990) Uncertainty: a guide to dealing with uncertainty in quantitative risk and policy analysis. Cambridge University Press, Cambridge
Nguyen TLT, Hermansen JE (2012) System expansion for handling co-products in LCA of sugar cane bio-energy systems: GHG consequences of using molasses for ethanol production. Appl Energ 89(1):254–261
Pelletier N, Tyedmers P (2011) An ecological critique of the use of market information in life cycle assessment research. J Ind Ecol 15(3):342–354
Pelletier N, Tyedmers P (2012) Response to Weinzettel. J Ind Ecol 16(3):456–458
Petersen KB, Pedersen MS (2008) The matrix cookbook. Available online: http://matrixcookbook.com. Last accessed 10 August 2012
Reap J, Roman F, Duncan S, Bras B (2008) A survey of unresolved problems in life cycle assessment—part 1: goal and scope and inventory analysis. Int J Life Cycle Assess 13(4):290–300
Sakai S, Yokoyama K (2002) Formulation of sensitivity analysis in life cycle assessment using a perturbation method. Clean Technol Envir 4:72–78
Sayagh S, Ventura A, Hoang T, François D, Jullien A (2010) Sensitivity of the LCA allocation procedure for BFS recycled into pavement structures. Resour Conserv Recy 54(6):348–358
Spielmann M, Scholz R, Tietje O, de Haan P (2005) Scenario modelling in prospective LCA of transport systems. Application of formative scenario analysis. Int J Life Cycle Assess 10(5):325:335
Suh S, Weidema BP, Heijrup J, Heijungs R (2010) Generalized make and use framework for allocation in life cycle assessment. J Ind Ecol 14(2):335–353
Svanes E, Vold M, Hanssen O (2011) Effect of different allocation methods on LCA results of products from wild-caught fish and on the use of such results. Int J Life Cycle Assess 16(6):512–521
Thrane M (2004) Energy consumption in the Danish fishery: identification of key factors. J Ind Ecol 8(1–2):223–239
UNEP (2011) Global guidance principles for life cycle assessment databases. Sonnemann G and Vigon B (editors). UNEP/SETAC Life Cycle Initiative. Available online: http://lcinitiative.unep.fr. Last accessed 7 May 2013
Wardenaar T, van Ruijven T, Beltran AM, Vad K, Guinée J, Heijungs R (2012) Differences between LCA for analysis and LCA for policy: a case study on the consequences of allocation choices in bio-energy policies. Int J Life Cycle Assess 17(8):1059–1067
Weidema BP (2001) Avoiding co-product allocation in life cycle assessment. J Ind Ecol 4(3):11–33
Weinzettel J (2012) Understanding who is responsible for pollution: what only the market can tell us—comment on “An ecological critique of the use of market information in life cycle assessment”. J Ind Ecol 16(3):455–456
Acknowledgments
This work has been carried out within the project “CO2 Reduction during the Production of Basic Chemicals” (01LS0901D). The project is funded by the German Federal Ministry of Education and Research (BMBF) within the funding priority “Research for Climate Protection and Protection from Climate Impacts.” The authors thank Reinout Heijungs for his valuable comments on existing methods for matrix-based LCA. The authors thank an anonymous reviewer whose comments motivated us to improve this manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Responsible editor: Andreas Ciroth
Electronic supplementary material
Below is the link to the electronic supplementary material.
ESM 1
(PDF 61 kb)
Rights and permissions
About this article
Cite this article
Jung, J., von der Assen, N. & Bardow, A. Sensitivity coefficient-based uncertainty analysis for multi-functionality in LCA. Int J Life Cycle Assess 19, 661–676 (2014). https://doi.org/10.1007/s11367-013-0655-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11367-013-0655-4