
The construction of a set of two-level integration ω-schemes for the equations of the flow theory of plasticity, describing anisothermic loading processes along the deformation paths of small curvature, is described. In this case, a stress-strain state is dependent on thermomechanical loading history, and inelastic deformation should be followed over the whole examined time interval in step solving the boundary problem. Basic concepts of the phenomenological model are built upon the Prandtl– Reuss equations of plasticity and the Huber–Mises yield condition. The loading process is divided into several time steps. The equations of plasticity are integrated in a loading step. The general procedure of transformations to construct a set of two-level integration ω-schemes for the equations of plasticity is proposed. The conditions for the agreement between the considered equations of plasticity and the principle of work irreversibility with plastic strain increments and Drucker’s hardening postulate are formulated. As an example, illustrating the properties of these equations, the deformation problem is solved for a thin-walled round pipe subject to axial tension and torsional moment. Results of solving the model problem, obtained with different two-level integration schemes, are presented. Practical recommendations as to the choice of the parameter ω are given.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction. For investigations of anisothermic elastoplastic deformation, the process of loading is divided into several time steps. Stress-strain kinetics is examined by successive analysis of thermomechanical loading history when at each subsequent loading step the problem is solved, accounting for the solution obtained at the previous one. The choice of a loading step duration is dependent on active external load and temperature field variation patterns.
The evolutionary elastoplastic problem based on incremental theories is determined from stress, strain, and displacement components at each loading step and from the solution of the system of nonlinear equations against increments of desired values in a loading step. The nonlinear boundary problem in increments is determined by approximate methods, which are used to reduce the thermoplasticity problem at each loading step to the successive solution of auxiliary linear problems.
However, it should be taken into consideration that for the solution of the elastoplastic problem in increments at each loading step, it is necessary to control accuracy of the satisfaction of resolving equations written for the full values of stress, strain, and displacement components since the boundary problem is solved approximately for the increments of these values and, thus, their summation may result in the accumulation of errors.
Moreover, the use of constitutive equations in increments suggests greatly smoothed approximating functions for generalized deformation diagrams of the material since the computation process stability would require the continuity of tangential moduli of these diagrams.
It should also be taken into account that the step-iterative procedure of solving the elastoplastic problem in increments may be accompanied by the so-called “false unloading” effect when under active plastic deformation, unloading in some body points on successive iterations occurs by the elastic law. For eliminating this effect, it is necessary to greatly reduce load increment steps or have the means of its detection available for the possibility of advancing along the deformation curve in the opposite direction. The first procedure extends considerably the time of problem solution, the second one complicates the computational algorithm and is inconvenient from the point of view of program realization.
The alternative approach consists in integrating the equations of plasticity in a loading step to derive the system of resolving equations not in increments but for the full values of stress, strain, and displacement components. This approach is used by Yu. N. Shevchenko and his disciples in Timoshenko Institute of Mechanics, National Academy of Sciences of Ukraine, e.g., in [1, 2] the defining relations, obtained by step-by-step integration of the equations of plasticity, are examined.
In this connection, the calculation procedure for stress-strain kinetics in welded structures, developed in Paton Electric Welding Institute, National Academy of Sciences of Ukraine, should be mentioned [3, 4].
The above approach to the solution of the elastoplastic problem allows difficulties to be circumvented, the latter are associated with the account of the false unloading effect, computation of tangential moduli from the deformation diagrams and accumulation of errors in the numerical solution in increments that contributes to the stability of the computation process. The duration of a loading step can be rather long if within the time step, deformation of all body points takes place along the paths of small curvature, which reduces considerably computational efforts in numerical analysis.
At the same time, consideration must be given to the solution of the elastoplastic problem [3, 4], assuming that at each time step, direction stress deviator components do not change under loading and are approximated by corresponding values at an examined loading moment. Note that the case in point is only approximation of direction stress deviator components in the equations of plasticity but not realization of proportional loading at each time step [5].
It is evident that piecewise-constant approximation of stress deviator components greatly simplifies the integration of the equations of plasticity. Nevertheless, the assumption for the direction stress deviator remaining unchanged under loading at each time step may be constrained. In particular, the description of plastic deformation under multiaxial loading can require a rather large number of time intervals for computations, which extends the time of solving the elastoplastic problem.
Note [1, 2] that the integration of equations of plasticity in a loading step is based on the Lagrange theorem of mean, known from analysis [6], and the assumption for the direction stress deviator components remaining unchanged under loading is not used.
Mathematical verification of the correctness of defining relations, obtained by the integration of equations of plasticity in a loading step [1–4], as well as analytical results for approximate methods of solving corresponding nonlinear boundary problems are absent in those studies. The above equations of plasticity can be correct if certain general principles used as the basis for the theory of flow of any kind are not violated. Thus, it is necessary to determine conditions of the agreement between the equations of plasticity and the principle of work irreversibility in plastic strain increments and Drucker’s hardening postulate [7]. If these conditions are satisfied, the one-to-one correspondence between stress and strain deviators are in existence, so within a loading step stresses can always be expressed as strains and vice versa. Moreover, the correctness of defining relations is used as the basis for mathematical analysis in studies on the solvability conditions of the nonlinear boundary problem, corresponding to the adopted deformation model, as well as on the proof of agreement between approximate solutions and the exact solution of the problem.
The conditions of existence and uniqueness of the solution of the boundary problem, describing anisothermic elastoplastic deformation along the paths of small curvature, were formulated in [8]. The boundary problem was stated on the basis of defining relations obtained by integrating the equations of plasticity in a loading step with the rectangular formula [9], which is equaivalent to the assumption for the direction stress deviator remaining unchanged under loading at each time step. Thus, cited results [8] of analysis of the boundary elastoplastic problem point to the correctness of defining relations for deformation along the paths of small curvature in the form of equations used in [3, 4].
The present study examines the construction of a set of two-level integration I-schemes for the equations of the flow theory of plasticity, describing anisothermic loading along the deformation paths of small curvature. The integration problem for the equations of plasticity and the Cauchy problem are formulated for ordinary differential equations with the initial condition, with the length of a deformation path in the space of plastic strains assumed as the argument (parameter characterizing the loading process). The general procedure of formal transformations is proposed to construct a set of two-level integration I-schemes for the equations of plasticity, and the conditions were examined for these equations to agree with the principle of work irreversibility in increments and Drucker’s hardening postulate.
Basic Concepts of the Phenomenological Model. Let σ(t) = (σ ij (t)) (1 ≤ i, j ≤ 3) be the symmetric stress tensor represented as the two components
where σ S (t) is the spherical tensor, σ D (t) is the stress deviator, and t is the time or any other parameter, characterizing the variation of loads experienced by the body.
The tensor of small strains ε(t) = (ε ij (t)) (1 ≤ i, j ≤ 3) by analogy with the stress tensor allows for the expansion as
where ε S (t) is the spherical tensor and ε D (t) is the strain deviator.
The statement of the anisothermic elastoplastic problem is based on the following concepts.
The body volume changes over the whole range of stress and strain variations are of elastic nature, i.e., the tensors ε S (t) and σ S (t) are linearly related
where k 0(T(t)) is the modulus of uniform volumetric expansion against the temperature T(t) and ε S (T) (t) is the tensor of thermal strains.
The deviator of the total strains ε D (t) is taken as the sum of the elastic and plastic components
The elastic component of the strain deviator is determined by the generalized Hooke law, which can be represented for the isotropic body as
where G 0(T(t)) is the initial shear modulus, temperature-dependent in the general case.
The stress σ D (t) and strain ε D (t) deviators in terms of their intensities \( \bar{\sigma}(t) \) and \( \bar{\varepsilon}(t) \) are determined by the relations given below
Here and below the following designations are used: (∙,∙) is the convolution of two arbitrary stress and strain tensors and ||∙|| is the tensor modulus, determined with the tensor convolution.
We have for the arbitrary stress σ(t) and strain ε(t) tensors
According to the elastoplastic model of the medium with isotropic hardening, the loading surface under plastic deformation is determined by the Huber–Mises yield condition [7] and is described by the equation
where Ψ(q 1(t), q 2(t),…, T(t), t) is the scalar functional, characterizing the material hardening, and q 1 (t), q 2 (t),… are the hardening parameters.
The plastic component of the strain deviator is defined by the law of plastic flow [7] associated with the loading surface [Eq. (5)]
where \( {{\overline{{d\varepsilon}}}^{(p) }}(t) \) is the intensity of infinitesimal increments of plastic strains,
In the case of deformation along the paths of small curvature, the equations of plasticity [Eqs. (6)] can be derived without resorting to the loading surface concept, which with the account of creep strains loses its significance.
According to the theory of elastoplastic processes developed by A. A. Il’yushin, the relations for deformation along the paths of small curvature can be deduced from the isotropy postulate and delay principle [5] and experimentally substantiated for the materials of different classes at room and elevated temperatures.
Among the above processes are those with the least radius of deformation path curvature much larger than the trace of delay of material vector properties at developed plastic strains [5]. In accordance with the principle of delay, the stress deviator vector may be directed at a tangent to the path of plastic strains. In this case, the relations of deformation along arbitrary flat paths are greatly simplified and transformed into Eqs. (6).
Thus, the constitutive equations, describing anisothermic processes of elastoplastic deformation along the paths of small curvature, include condition of elastic volume change (1) and relations (2), (3), and (6), which are equivalent to the Prandtl–Reuss equations of state [7, 10]
Relations (6) and (7) are usually termed the equations of the theory of flow with isotropic hardening under anisothermic loading. Applicability of these equations is depicted by their self-explanatory name “dependences of deformation processes along low-curvature paths.”
Integration of Equations of Plasticity. When Eqs. (7) are used, the loading process is divided into the time steps in a way that calculated time moments, separating loading and unloading steps, were coincident whenever possible with the time moments of changing the deformation direction of body elements from loading to unloading and vice versa [1].
Integrate equations of plasticity (6) in a loading step. As a result, the equality is obtained
where ∆ m ε(p) D is the increments of plastic strains in the end of an mth loading step,
From relations (2), (3), and (9), we find
The construction of the constitutive equations relative to the full values of stress and strain tensor components would require the derivation of explicit analytical relations for plastic strain increments in a loading step.
As follows from the analysis given below, such analytical formulas can be obtained with different approximate (numerical) methods of integrating equations of plasticity (6). Although they are solved with numerical integration methods, their approximate solution can always be represented as an analytical recurrent formula. This formula may be used to derive the explicit analytical relations for plastic strain increments in a loading step. If these relations are substituted in Eq. (10), the defining relations for deformation along the paths of small curvature would be obtained relative to stress, total and plastic strain deviator components.
Therefore, the following problem is stated: construct adequate integration schemes for equations of plasticity (6) and derive explicit analytical relations for determining plastic strain increments in a loading step. “Adequate integration schemes” imply that governing equations, which correspond to these integration schemes, should have a correct formulation.
Let s = s(t) be the deformation path arc length in the space of plastic strains defined by
Assume that at the loading step the plastic strain path arc length extends monotonically under deformation, i.e., in the time dt, the arc length s = s(t) gains the increment
Thus, the stress and strain tensor components may be considered not only as the time (t) functions but also as the path length (s) functions.
Introduce the direction stress deviator \( {{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{\sigma}}_D}(s) \)
Then Eqs. (6) may be represented as kinetic differential relations, describing deformation in the space of plastic strains
So the mathematical model of plastic deformation is the Cauchy problem for ordinary differential equations (12) supplemented with the initial condition
where ε(0) D is the deviator of initial irreversible strains in the elastoplastic body.
Exact analytical solutions of the Cauchy problem for Eqs. (12) and (13) can be obtained for loads of several classes, e.g., for simple loading processes. For the mogority of problems of practical interest, Eqs. (12) and (13) cannot be solved by analytical methods.
The objective of the present study is to describe the adequate methods of construction of approximate solutions of the Cauchy problem based on the one-step integration of equations (12).
Initial conceptual grounds for the construction of approximate solutions of Eqs. (12) and (13) may be different. By now the three approaches with common specific features can be recognized.
The first approach is based on the Taylor expansion of plastic strain deviator components [6] and the use of finite difference methods. The explicit Euler method of the first order of accuracy is the simplest numerical scheme of the methods of this class [9]. Among other difference methods, the Runge-Kutta method of the second order of accuracy should be mentioned [9].
The second approach is built upon the integration of differential equations (12) in a loading (deformation) step, which leads to the computation of integrals relative to the direction stress deviator components. If different approximations are used for their computation, the corresponding integration schemes for Eqs. (12) are obtained. The simplest approximation procedure is the application of numerical integration formulas [9], another one is the use of piecewise-polynomial interpolation of the direction stress deviator components followed by exact integration of the interpolating polynomial [9].
The third approach is apparently the most general one, it is based on the construction of approximate solutions for Eqs. (12) and (13) with a procedure of projection methods [11]. For this, the left-hand and right-hand sides of differential equations (12) are multiplied by the arbitrary continuous function μ(s) and the increment ds, and then the equalities in a deformation step are integrated. As a result, the integral identity is obtained
where
Integral identity (14) was obtained by the “projection” of equations of plasticity (12) on the multitude of the admissible functions μ(s).Note that the projection form of integral identity (14) is close to the equalities of the Petrov–Galerkin projection method and the Bubnov–Galerkin method [11].
If within the examined deformation range, the plastic strain deviator ε D (p) (s), direction stress deviator \( {{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{\sigma}}_D}(s) \), and function μ(s) are approximated by their values at the range boundaries [s n-1, s n ], a set of two-level integration ω-schemes for equations of plasticity (12) are obtained
where ω is the weighting factor, its value determining an integration scheme.
As regards the choice of the weighting factor ω, we assume that it cannot take on negative or infinitely large values. Moreover, only those integration schemes (15) would be examined where admissible values of the weighting factor ω are bounded by the inequality
where \( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{\omega }} \) is the lower threshold value of the factor ω, which is necessary to be estimated.
Cite several versions, following from Eq. (15), as the special cases of a set of integration I-schemes for Eqs. (12).
Thus, if the function μ(s) in integral identity (14) is assumed to be equal to unity and the direction stress deviator \( {{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{\sigma}}_D}(s) \) is approximated with the relation
we arrive at the Petrov–Galerkin method, which results in implicit integration scheme (15) with the weighting factor ω = 1, used by V. I. Makhnenko.
Moreover, if in identity (14) μ(s) = 1 is assumed and the direction stress deviator \( {{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{\sigma}}_D}(s) \) is approximated with the linear interpolation
we get the integration scheme of the Runge-Kutta method with the weighting factor ω = 1/2 known in the theory of finite difference methods as the Crank–Nicholson scheme of the second order of accuracy [9]. Integration formula (15) with the weighting factor ω = 1/2 is used by Yu. N. Shevchenko.
The more general approach is built upon the application of linear interpolation of the plastic strain deviator ε D (p) (s), direction stress deviator \( {{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{\sigma}}_D}(s) \), and function μ(s) within the examined deformation range.
When linear interpolation of the plastic strain deviator ε D (p) (s) is used, we get the following equation for the derivative
It should also be considered that the values of the deviator components ε D (p) (s n-1) and \( {{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{\sigma}}_D}\left( {{s_{n-1 }}} \right) \) are known and, thus, the function μ(s) is set as
If relations (17)–(19) are substituted in integral identity (14), the integration scheme of the Bubnov–Galerkin method with the weighting factor ω = 2/3 is obtained.
Other approaches to the construction of integration schemes for equations of plasticity (12) are also possible, however, they are not examined in this study.
Estimate the error of formula (15) in computation of plastic strain increments in a deformation step. For this, the equalities are written
with the account of error estimates for the rectangular formula [9], we find
where k = k(s) is the parameter of deformation path curvature in the space of plastic strains, determined by the relation
Since the processes of deformation along the paths of small curvature are examined, the upper bound is set on the value of the parameter |k(s)|,thus, according to estimation (20), formula (15) possesses the second order of accuracy relative to the increment of the plastic strain path length in a deformation step.
The error of formula (15) in the computation of the plastic strain deviator \( \bar{\varepsilon}_D^{(p)}\left( {{s_m}} \right) \) in the end of an mth deformation step is estimated by the equality
with the account of the triangle inequality [9] and estimation (20), we find
Therefore, the estimate is valid
According to estimation (21), the computation of the plastic strain deviator with integration formula (15) introduces the error of the first order relative to a maximum increment of the plastic strain path length in a deformation step.
On the basis of estimation (21) and the equality
the following remark can be made. If the direction stress deviator \( {{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{\sigma}}_D}(s) \) under deformation varies “rather smoothly” relative to the argument s, formula (15) does not apparently introduce large errors.
It should also be noted that the Crank–Nicholson integration scheme with the weighting factor ω = 1/2 provides the plastic strain deviator computation of the second order of accuracy with formula (15).
Statement of Constitutive Equations. The statement of defining relations for deformation along the paths of small curvature should consider a set of two-level integration I-schemes for equations of plasticity (12). For determining the increments of plastic strains in a loading step, formula (15) is used where the upper symbol “~”is omitted to simplify the representation of equations.
On the basis of formula (15), the equation for plastic strain increments in a loading step can be represented as
Introduce the positive scalar function G s (t m ), dependent on the parameter ω and determined from the relation
According to formulas (22) and (23), we find
where \( {{\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{\sigma}}_D}\left( {{t_{m-1 }}} \right) \) is the deviator of “additional” stresses,
According to Eqs. (10) and (24), we have
from (26) follows the equation for the stress deviator σ D (t m )
On the basis of relations (1) and (27), the constitutive equations of the theory of plasticity can be represented as
where ξ(t m ) is the tensor of initial strains,
Notice that the form of Eqs. (28) is coincident with that of the equations of the theory of simple deformation processes, in particular the theory of small elastoplastic strains [5]. Nevertheless, such coincidence is entirely formal. The initial strains in Eqs. (28) are obtained from (29) and determined not only by nonuniform heating of the body but also by elastoplastic deformation history.
Assume that ε D (a) (t m ) is the deviator of active strains arising in the body element in addition to the initial strains ξ D (t m ) in the end of an mth loading step
Then Eqs. (28) can be written as
If substitute Eq. (31) in formula for the intensity of the stress deviator (5), we get
where \( {{\bar{\varepsilon}}^{(a) }}\left( {{t_m}} \right) \) is the intensity of the active strain deviator ε D (a) (t m ),
It follows from (32) that at the fixed intensities of stress deviators and active strains, the scalar function G s can be interpreted as the “secant shear modulus” of the material. However, such interpretation of Eq. (32) is formal since the intensity of the active strain deviator is also determined with the secant shear modulus, which is evident from Eqs. (29), (30), and (33).
So the nonlinearity of Eqs. (28), (29), and (32) is dependent on the two factors. The first one is defined by the relation between the secant shear modulus and the intensities of stress deviators and active strains, which follows from Eq. (32). The second one is controlled by the relation between the deviator of initial strains and the intensity of the stress deviator and the secant shear modulus, which follows from Eqs. (25) and (29).
The intensity of the stress deviator may be expressed in terms of the intensity of the active strain deviator with the functional relation describing the material hardening. In such a case, the secant shear modulus and deviator of initial strains would depend only on the intensity of the active strain deviator. Nevertheless, by the start of the loading step, the intensity of the active strain deviator for the examined loading step is the unknown function, which leads to the nonlinearity of Eqs. (28), (29), and (32).
Computation of Plastic Strains. Plastic strains in the end of an mth loading step are calculated by Eqs. (2) and (3), hence the formula follows
which with regard for Eqs. (28) can be written as
where ε D (m) (t m ) is the modified strain deviator defined by the equation
Computation of the Odquist Parameter. The Odquist parameter q(t m ), characterizing accumulated plastic strains in the end of an mth loading step, is determined by the relation
It is evident that this parameter has a simple geometrical meaning, viz with an accuracy to the multiplier \( \sqrt{{{2 \left/ {3} \right.}}} \) it is equal to the deformation path arc length in the space of plastic strains.
If in Eq. (36) the additivity property of a definite integral is considered, we obtain
where the increment Δ n q is calculated by Eq. (23)
With relations (3), (32), and (38), we find
hence the equality follows whereby the interrelation between the intensities of active and elastic strains and the increment of the Odquist parameter
According to equality (40), the intensity of the active strain deviator can be represented as the sum of the intensity of the elastic strain deviator and a certain part of the Odquist parameter increment, which is dependent on the weighting factor of the integration scheme [Eq. (22)].
The geometrical interpretation of relations (32) and (40) is presented in Fig. 1.

Generalized deformation diagram.
Construction of the Functional Relation of the Material Hardening. In the incremental theories of plasticity, it is usually presumed that the intensity of the stress deviator \( \bar{\sigma}(t) \) for an examined material is the functional of the Odquist parameter q(t), temperature T(t), and, probably, time t:
However, constitutive equations (28), (29), and (32), would require the construction of another, different from (41) functional relation that characterizes the material hardening under plastic deformation.
It is assumed [Eq. (32)] that for an examined material, the intensity of the stress deviator \( \bar{\sigma}(t) \) is the functional of the intensity of the active strain deviator \( {{\bar{\varepsilon}}^{(a) }}(t) \), temperature T(t), and time t:
It is obvious that such a definition is not exaustive since no account is taken in the effect of hardening acquired by the material under prior plastic deformation. For the examined time moment t at the corresponding temperature T(t), the intensity of the stress deviator \( \bar{\sigma}(t) \) is dependent not only on the intensity of the active strain deviator \( {{\bar{\varepsilon}}^{(a) }}(t) \) at a given time moment t but also on the material hardening at the time moment τ < t.
It follows that functional relation (42) should describe elastoplastic deformation with regard to the initial material hardening, viz. the material hardening by the start of a loading step. From this, represent functional relation (42) in the more complete form
where the parameter, characterizing the material hardening by the start of a current loading step, is taken as the additional argument q(τ). Note that the hardening parameter q(τ) is determined by deformation history, therefore, in Eq. (43) this parameter may describe loading history. The simplest assumption for the hardening behavior of the material is that the value of accumulated plastic strains, i.e., the Odquist parameter, is taken as the measure of hardening.
Under isothermic loading, functional (43) may be interpreted as the deformation surface with the initial hardening. Under anisothermic loading, it describes the multitude of thermomechanical surfaces against the hardening level. For the fixed values of the hardening parameter q(τ), functional (43) may be interpreted as the thermomechanical surface with the initial hardening.
For the concrete definition of functional relation (43), the deformation parameter e(t) is used that characterizes the material hardening under elastoplastic deformation in each body point. It is determined as the sum of accumulated plastic strains and the intensity of the elastic strain deviator
We find with Eqs. (37), (40), and (44)
with the account of second formula (39), we get
where the term γ(t) is set as
Analysis of Eqs. (44) and (45) may lead to the following comments. According to Eq. (44), the parameter e(t) characterizes the total accumulated strain under elastoplastic deformation of the material in each body point. As follows from Eq. (45), this parameter can be determined with the parameter of initial hardening q(τ) and the intensity of the active strain deviator \( {{\bar{\varepsilon}}^{(a) }}(t) \).
Thus, functional relation (45) can be presented as
Assume that functional (47) does not depend on the path curvature, hydrostatic pressure, or a stress deviator and is determined from uniaxial tensile tests of cylindrical specimens at different fixed temperatures. The defining relations of the theory of plasticity in the form of Eqs. (28), (29), and (32) should be supplemented with functional relation (47). The constitutive equations are written in a unified form irrespective of a loading process, which allows their use in the description of simple active loading, deformation along the paths of small curvature, unloading and reloading.
Further derivation of functional relation (47) is based on the equation of the instantaneous thermomechanical surface
where by the strain \( \bar{\varepsilon} \) is meant only a pure mechanical component, i.e., the total strain minus the thermal one. Note that the equation of the instantaneous thermomechanical surface is the locus of deformation diagrams plotted at different fixed temperatures. It confirms that stresses in the specimen are the function of strains and temperature.
If for the concrete definition of functional relation (47) equation of the instantaneous thermomechanical surface (48) is used, it would be necessary to establish the agreement between a multiaxial stress-strain state of the body element and uniaxial tension of the specimen. Assume that in uniaxial tension of the specimen, the parameter e is identified with the total strain \( \bar{\varepsilon} \) and the parameter q, characterizing the material hardening, is associated with the plastic strain of the specimen. Then with the account of the linear relation over the elastic deformation range, we obtain
where e p is the strain, corresponding to the instantaneous proportionality limit f (e p T), dependent on the accumulated plastic strain q and temperature T.
From Eq. (49), we get the equation for e p :
With relations (32) and (50), we find
Comments on Defining the Strain e p with Eq. ( 50 ). Assume that at the fixed temperature T, the piecewise linear approximation of the function f (e, T) is used against the strain e. For this, the whole range of e variations is divided into the portions [e n-1, e n ], and within each of them the linear interpolation of the following form is preset
where g n (T) is the linear hardening modulus within the portion [e n-1, e n ]
Then from Eqs. (50) and (51), we obtain the equation for e p :
Comments on the Odquist Parameter. Demonstrate that for equations of plasicity (28), (29), and (32), the increment of the Odquist parameter is not equal to the intensity of plastic strain increments in a loading step. This statement is formulated more exactly in the following way. If the values of the weighting factor ω satisfy the condition
then the inequality is valid
where \( {{\overline{{{\varDelta_m}\varepsilon}}}^{(p) }} \) is the intensity of plastic strain increments in a loading step,
The deviator of active strains can actually be represented as
where the strain deviator \( \varepsilon_D^{(m)}\left( {{t_m}} \right) \) is determined by Eq. (35).
Then in accordance with the triangle inequality, we obtain such estimates
From (32), (35), (52), and (55), we arrive at the inequalities
According to equality (34), we have
and with regard for (39), (54), (56), and (57), we find
Thus, we obtain the inequalities
hence (53) follows. The exception is integration scheme (15) with the weighting factor ω = 1 for which the equality \( {\varDelta_m}q={{\overline{{{\varDelta_m}\varepsilon}}}^{(p) }} \) is valid and the invariability of direction stress deviator components at a loading step is assumed.
Differential Form of Equations of Plasticity. Demonstrate that differential equations of plasticity, corresponding to defining relations (28), (29), and (32), belong to the equations of so-called singular plasticity, assuming the existence of a specific point on the loading surface. It is well to bear in mind that the nature of singularity is dependent not on the physical relationships of deformation of the elastoplastic medium but on approximate integration of equations of plasticity (6) in a loading step.
Let the body be in the plastic state, which is characterized by the stresses σ D at an examined time moment. Impart the infinitesimal increments dσ D to the latter, which leads to additional plastic strains. Compute the infinitesimal increments of plastic strains at a preset reloading dσ D . For this, apply relation (24) for the finite increments of plastic strains in a loading step, so it follows
where σ′ D is the deviator of the sum of stresses
Differentiate the right-hand side of equality (58). According to the differentiation rules for complicated functions, we have
Moreover, accounting for (32), we find
where G t is the tangent shear modulus of the material,
Differentiation of relation (44) results in
where the increment dγ is derived from Eq. (46):
If (61) is substituted in formula (64) and then the expression for the increment dγ is inserted in the right-hand side of equality (63), we arrive at the relation
With regard for (65), Eq. (61) takes on the form
where G ω is the shear modulus in the form of the linear combination
From Eqs. (60) and (66), we obtain the equation for infinitesimal increments of plastic strains
Advance the expression for the stress increment dσ′ D used in Eq. (68). If the stress deviator σ′ D is preset as sum (59), the equality is valid
The increment \( d{{\tilde{\sigma}}_D} \) is determined from (25), hence
Accounting for (59), (69), and (70), Eq. (68) becomes
With certain comments on the properties of Eq. (71), represent it in a somewhat different form
In the case of proportional loading, in Eq. (72) only the first term remains, which is transformed to the basic equation of the theory of flow on isotropic hardening, i.e., to equation of plasticity (6).
It also follows from Eq. (72) that under neutral/orthogonal reloading, the first term disappears but the second one remains, so according to Eq. (72), neutral reloading can give rise to the changes in some plastic strain deviator components.
Thus, under arbitrary reloading, the second term in Eq. (72) governs the increment of plastic strain deviator components caused by the rotation of principal axes with the infinitesimal increment of stress deviator components.
Referring to Eq. (71) and following reasonings [12], we notice that the loading surface cannot be smooth since the direction of the vector of plastic strain increments depends only on the stress vector σ D but not on the reloading vector dσ D and the stress vector \( {{\tilde{\sigma}}_D} \). The first term in Eq. (71) satisfies this condition, the second and third ones are dependent on the increment vector dσ D and the stress vector \( {{\tilde{\sigma}}_D} \), respectively, so the vector of plastic strain increments under reloading can change its direction depending on the ratio of the components of the above vectors. Therefore, the end of the stress vector σ D is the angular point of the loading surface.
However, Eqs. (71) and (72) do not allow for any particular conclusions of a loading surface in the vicinity of the angular point. As follows from those equations, for certain loadings, other than the proportional one, the subsequent loading surfaces, bounding the area of elastic unloading, can have the angular point moving along the loading path together with the stress vector end.
Comments on the Correctness of Constitutive Equations. Present certain quite evident reasonings as to the applicability conditions for constitutive equations (28), (29), and (32) without their detailed analysis.
It appears reasonable that constitutive equations (28), (29), and (32) would be correct only if some general principles of any theory of flow are not violated. In this connection, it would be necessary to clarify the conditions of the agreement between equations of plasticity (28), (29), and (32) and the principle of work irreversibility with plastic strain increments and Drucker’s hardening postulate.
Verify the fulfilment of the irreversibility condition, which consists in that the increment of plastic form change work is the positive value
For this, one should consider that the deviator of additional stresses \( {{\tilde{\sigma}}_D} \) is computed with Eq. (25), hence
where σ D is the direction stress deviator for the preceding loading step with its modulus of unity, i.e., ||σ D || = 1.
The increment of the intensity of the stress deviator \( d\bar{\sigma} \) is preset as
thus, if expression for plastic strain increments (71) with the account of Eqs. (74) and (75) is substituted in Eq. (73), we obtain
where θ is the angle from the relation
Note that by virtue of the Cauchy–Bunyakovsky–Schwarz inequality [6], the expression in the right-hand side of equality (77) does not exceed unity, i.e., the angle θ was computed correctly.
With regard to relation (67), we have
therefore, Eq. (76) takes on the form
Make several comments on Eq. (79). For the majority of real materials, the deformation diagram is usually convex upwards and does not exhibit the inflection points, therefore, the conditions G 0 > G t > 0 are always fulfilled. Thus, the first term in the right-hand side of equality (79) is positive.
Under the reloading \( d\bar{\sigma}>0 \) and the condition cos θ ≥ 0, Eq. (79) results in the inequality dA > 0. From the inequality cos θ < 0, we conclude that the condition dA > 0 would be fulfilled only if the values of the weighting factor ω do not contradict the inequality
The simplest analysis allows for the following conclusion. The modulus of angle cosine does not exceed unity, thus, we obtain the condition that sets the lower bound on the choice of admissible values of the weighting factor ω
Check on the fulfilment of the inequality stemming from Drucker’s postulate, which implies that the work of the additional stresses dσ D in the whole cycle of additional loading and unloading is positive in the presence of plastic strains
If (71) is substituted in inequality (81), with the account of relations (74), (75), and (78), we get
where \( \overline{{d\sigma }} \) is the intensity of stress deviator increments,
Λ (φ, ψ) is the trigonometric function, which can be presented in the form
φ and ψ are the reloading angles
Examine some typical reloading cases. Under proportional loading, we have φ = ψ = θ = 0, thus, Eq. (82) takes on the form
Moreover, under neutral reloading, we have φ < π/2, as a result, we arrive at the equality
Equations (83) and (84) are positive at G0 > G s > G t > 0, which is usually fulfilled if the material is hardened monotonically and the deformation curve has no inflection points.
Accounting for the reloading \( d\bar{\sigma}>0 \), the estimate cos φ > 0 follows from equality (75), so if 0 ≤ ψ ≤ π/2, we have cos ψ ≥ 0 which allows the lower bound on the function Λ(φ, ψ) to be estimated with the following inequality:
Under the arbitrary reloading \( d\bar{\sigma}>0 \) and the condition π/2 < ψ ≤ π but with the limitation on the reloading angle φ in the form of the inequality φ ≤ π-ψ, we get the estimate |cos ψ| ≤ cos φ. In this case, the lower bound on the function Λ(φ, ψ), can be evaluated
hence it follows that the inequality Λ(φ, ψ) > 0 would be valid if the condition ω > 1/2 is fulfilled, setting the lower bound on the weighting factor ω.
For all other reloadings, function (82) is written as
hence the necessary and sufficient conditions for the fulfilment of inequality (81) are as follows
Inequalities (85) set the lower bound on the weighting factor ω
Thus, the limitations, stemming from the principle of work irreversibility and Drucker’s hardening postulate, refer to the estimation of the lower threshold \( {\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{\omega }} \) value, introduced above with inequalities (16).
Practical Recommendations for the Choice of the Parameter ω. Conditions (85) and (86) narrow the range of admissible values of the weighting factor ω and influence the error of integration formula (15). Really, not all of the above integration ω-schemes for equations of plasticity (6) result in the construction of stable defining relations, as Eqs. (28), (29), and (32). In particular, explicit integration schemes, e.g., the Euler method with the weighting factor ω = 0 and the Crank–Nicholson integration scheme with the weighting factor ω = 1/2 of the second order of accuracy, can lead to the violation of Drucker’s hardening postulate and the principle of work irreversibility with plastic strain increments, which in its turn, violates the correctness of constitutive equations (28), (29), and (32) and causes the incorrect statement of the boundary problem.
Results of numerical calculations confirmed that ignoring the condition ω > 1/2 can induce the degeneracy of the boundary problem, the loss of stability or violation of convergence of the computation processes. The integration scheme of the Bubnov–Galerkin method with the weighting factor ω = 2/3 and the implicit scheme of the Petrov–Galerkin method with the weighting factor ω = 1 can be recommended for practical applications. The experience of solution of practical problems shows that the integration scheme of the Bubnov–Galerkin method with the weighting factor ω = 2/3 would be advantageous to use for the solution of elastoplastic problems with a moderate change in the direction of deformation of body elements when passing from a current loading step to the next one, e.g., for the solution of heating or cooling problems with a smooth variation of external loads. The implicit integration scheme of the Petrov–Galerkin method with the weighting factor ω = 1 can be recommended for the solution of elastoplastic problems with lumped loading steps and abrupt changes in the directions of deformation of body elements under loading, e.g., under loading followed by total or partial unloading, or variable reloading.
Example. For illustrating the properties of equations of plasticity (28), (29), and (32), analyze the deformation problem for a thin-walled round pipe subject to axial tension and torsional moment.
The elastic modulus E 0 is taken to be 10MPa. Assume that the material is incompressible with the linear hardening E 1 = E 0/2. The yield stress σ s is set to be 200 MPa.
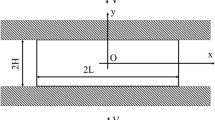
The problem is solved at a plane stress state. Take a unit square, the axial tensile c and tangential σ stresses are applied to its sides according to a preset loading program.
Examine the two paths of step loading, each represents the two broken lines in the space of stresses σ - τ (Fig. 2).

Two paths of step loading of a thin-walled pipe.
The first path corresponds to the tension-torsion loading program. The first broken line describes a monotonic growth of the tensile stress σ from zero to \( \sqrt{3} \) σ s , the second one covers a monotonic increase in the tangential stress τ from zero to \( {{{{\sigma_s}}} \left/ {{\sqrt{3}}} \right.} \), given that the tensile stress σ is constant and equal to \( \sqrt{3} \) σ s .
The second loading path is an alternative to the first one and describes loading history according to the torsion-tension program. The first broken line corresponds to a monotonic growth of the tangential stress τ from zero to \( {{{{\sigma_s}}} \left/ {{\sqrt{3}}} \right.} \), the second one describes a monotonic increase in the tensile stress σ from zero to \( \sqrt{3} \) σ s , given that the tangential stress τ does not change and equals \( {{{{\sigma_s}}} \left/ {{\sqrt{3}}} \right.} \).
The exact solutions of the problem for the axial ε(p) and shear γ(p) components of the plastic strain tensor in the end of each loading path are based on the following formulas:
first loading path
second loading path
where
Since the problem is statically definable, an estimate was made of the summary error δ of determining the plastic strain tensor components in the end of each loading path
where \( {{\tilde{\varepsilon}}^{(p) }} \) and \( {{\tilde{\gamma}}^{(p) }} \) are the approximate solutions obtained with integration ω-schemes.
For the first and second loading paths, the first broken line describes proportional loading, therefore, only the second one was divided into additional steps.
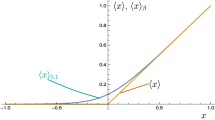
The solution results, obtained with different values of the weighting factor ω and different numbers N of loading steps of the second broken line, are summarized in Tables 1–6. As is seen, in the case of lumped loading steps, the application of the integration scheme of the Bubnov–Galerkin method with the weighting factor ω = 2/3 to the solution of the model problem results in the smallest summary error of plastic strain determinations. It is a rather important argument in favor of practical application of the above scheme since the solution of the elastoplastic problem with lumped loading steps can greatly cut computational efforts. With an increase in the number of loading steps, the problem can be solved more exactly on the basis of the Crank–Nicholson integration scheme with the weighting factor ω = 1/2 of the second order of accuracy. According to the results, with any number of loading steps of the second broken line, a maximum error is characteristic of the implicit integration scheme of the Petrov–Galerkin method with the weighting factor ω = 1. Also note that a reduction in the hardening modulus E 1 does not result in essential changes of the solution error–parameter ω relation.
Conclusions. The construction of a set of two-level integration I-schemes for the equations of the flow theory of plasticity, describing anisothermic loading processes along the deformation paths of small curvature, has been proposed. Basic concepts of the phenomenological model are based on the Prandtl–Reuss equations of plasticity and the Huber–Mises yield condition. The integration problem for the equations of plasticity was stated as the Cauchy problem for ordinary differential equations, with the deformation path length in the space of plastic strains taken as the argument characterizing the loading process. A general scheme of formal transformations for the construction of approximate solutions of the Cauchy problem on the basis of a set of two-level integration I-schemes for the equations of plasticity has been discussed. The differential equations of plasticity belong to the equations of so-called singular plasticity, assuming the existence of a specific point on the loading surface. The conditions of agreement between the equations of plasticity, constructed with two-level integration ω-schemes, and the principle of work irreversibility with plastic strain increments and Drucker’s hardening postulate have been investigated. As an example, illustrating the properties of the equations of plasticity, the deformation problem was solved for a thin-walled round pipe subject to axial tension and torsional moment. The solution results for the model problem, obtained with different two-level integration I-schemes for the equations of plasticity, are presented and recommendations for the choice of the weighting factor I are given.
References
Yu. N. Shevchenko and V. G. Savchenko, Thermoviscoplasticity [in Russian], Naukova Dumka, Kiev (1987).
Yu. N. Shevchenko, M. E. Babeshko, and R. G. Terekhov, Thermoviscoplastic Processes of Multiaxial Deformation of Structural Elements [in Russian], Naukova Dumka, Kiev (1992).
V. I. Makhnenko, Calculation Methods for the Studies on the Kinetics of Weld Strains and Stresses [in Russian], Naukova Dumka, Kiev (1976).
V. I. Makhnenko, E. A. Velikoivanenko, V. E. Pochinok, et al., Numerical Methods for the Predictions of Welding Stresses and Distortions, Welding and Surfacing Reviews Ser., Vol. 13, Pt. 1, Taylor & Francis (1999).
A. A. Il’yushin, Plasticity: Foundations of General Mathematical Theory [in Russian], AN SSSR Izd., Moscow (1963).
L. D. Kudryavtsev, Short Course of Mathematical Analysis [in Russian], Nauka, Moscow (1989).
L. M. Kachanov, Foundations of the Theory of Plasticity [in Russian], Nauka, Moscow (1969).
A. Yu. Chirkov, “Analysis of boundary-value problems describing the non-isothermal processes of elastoplastic deformation taking into account the loading history,” Strength Mater., 38, No. 1, 48–71 (2006).
N. S. Bakhvalov, N. P. Zhidkov, and G. M. Kobel’kov, Numerical Methods [in Russian], Nauka, Moscow (1987).
I. A. Birger and I. V. Dem’yanushko, “Theory of plasticity under anisothermic loading,” Mekh. Tverd. Tela, No. 6, 70–77 (1968).
G. I. Marchuk and V. I. Agoshkov, Introduction to Projection-Grid Methods [in Russian], Nauka, Moscow (1981).
Yu. N. Rabotnov, Mechanics of a Deformable Solid Body [in Russian], Nauka, Moscow (1979).
Acknowledgments
The author is thankful to Dr. K. N. Rudakov and Dr. V. A. Romashchenko for analytical materials and discussion of solution results for the test problem.
Author information
Authors and Affiliations
Additional information
Translated from Problemy Prochnosti, No. 6, pp. 93 – 124, November – December, 2012.
Rights and permissions
About this article
Cite this article
Chirkov, A.Y. Construction of two-level integration schemes for the equations of plasticity in the theory of deformation along the paths of small curvature. Strength Mater 44, 645–667 (2012). https://doi.org/10.1007/s11223-012-9420-3
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11223-012-9420-3