
Abstract
Site-specific management of crops represents an important improvement in terms of efficiency and efficacy of the different labours, and its implementation has experienced a large development in the last decades, especially for field crops. The particular case of the spray application process for what are called “specialty crops” (vineyard, orchard fruits, citrus, olive trees, etc.) represents one of the most controversial and influential actions directly related with economical, technical, and environmental aspects. This study was conducted with the main objective to find possible correlations between data obtained from remote sensing technology and the actual canopy characteristics. The potential correlation will be the starting point to develop a variable rate application technology based on prescription maps previously developed. An unmanned aerial vehicle (UAV) equipped with a multispectral camera was used to obtain data to build a canopy vigour map of an entire parcel. By applying the specific software DOSAVIÑA®, the canopy map was then transformed into a practical prescription map, which was uploaded into the dedicated software embedded in the sprayer. Adding to this information precise georeferenced placement of the sprayer, the system was able to modify the working parameters (pressure) in real time in order to follow the prescription map. The results indicate that site-specific management for spray application in vineyards result in a 45% reduction of application rate when compared with conventional spray application. This fact leads to a equivalent reduction of the amount of pesticide when concentration is maintained constant, showing once more that new technologies can help to achieve the goal of the European legislative network of safe use of pesticides.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Crop protection issues, and related pesticide application, is one of the most important and critical aspect associated with environmental contamination, safety of operators, and food safety (EFSA 2018; Carvalho 2017). Moreover, it represents one of the most influential aspects in the economical balance of crop production (Damalas and Eleftherohorinos 2011). These considerations justify the widespread and intensive research activities carried out in the past and current activities.
Considering the specific case of what is recently being called ‘specialty crops’, which include orchard trees, citrus, olive trees, and vineyard crops, the most important factors to control for a better and more efficient spray application process are those associated with the specific and particular canopy characteristics (structure, dimensions, trellis system, etc.) (Solanelles et al. 2006; Balsari et al. 2008; Rosell and Sanz 2012; Salcedo et al. 2015; Palleja and Landers 2015). Every crop, in combination with specific characteristics (parcel, variety, zone, etc.) is provided with a particular and very well-defined structure, dimensions, and even foliar area and density. All of these aspects have to be considered during the requested adjusting/calibration process of the sprayer before the spraying process. Furthermore, in most cases, vegetative crops also have a crucial effect on the final shape and structure of the target to be sprayed. Numerous studies have already been conducted with the objective of quantifying the relationship between the quality of the spray application process and differences in canopy characteristics (Balsari et al. 2008; Doruchowski et al. 2009; Gil et al. 2014a, b, Miranda-Fuentes et al. 2016; Garcerá et al. 2017).
Canopy characteristics and its influence on both the optimal volume rate and the most efficient amount of pesticide to be applied is currently a crucial aspect directly related with the discussion about the best way to express the recommended amount of pesticide (pesticide dose) and the optimal amount of water, as practical information to be included on the pesticide label. For the abovementioned ‘specialty crops’, much discussion and research are also being conducted with the objective of achieving a common agreement among EU zones (EPPO 2012). Linked to the recommended dose of pesticide, it is clear that the canopy characteristics must be considered. Consequently, in the last decades various methods have been proposed, not only for canopy characterisation, but also with the aim of establishing a proper way to express the intended dose (Walklate and Cross 2012; Codis et al. 2012; Gil et al. 2014a, b; Toews and Friessleben 2012).
Target detection has been developed either by using advanced techniques, such as vision systems and laser scanning, or by ultrasonic and spectral systems. Gil et al. (2007) obtained a significant reduction in the total amount of applied volume (57%) using a sprayer prototype with ultrasonic sensors able to measure the crop width variations and to apply a variable dose rate according to the instantaneous measured vine row volume (VRV), in comparison with a conventional and constant application volume rate. However, this reduction did not affect the results in terms of deposit of pesticide, leaf coverage and penetration where similar normalized values were achieved. Solanelles et al. (2002) demonstrated that different shapes, sizes and foliar densities in tree crops during the same growing season require a continuous adjustment of the applied dose rate to optimize the spray application efficiency and to reduce environmental contamination. Crop characteristics are directly related to the total amounts of pesticide deposit on leaves and values of leaf area and canopy dimensions (mainly height and width) can widely affect the efficiency values, as a relationship between the expected deposit and the actual one. It seems that any approach to adapt the spraying volume rate to crop characteristics will lead with a general principle that foliar application must results in similar deposits (μg cm−2), independently of crop size or canopy density. That system would avoid the problem of overdosage of PPP detected as a frequent problem in the early crop growth stages, especially in orchards and vineyards where in most cases pesticide dose rate is expressed in many different ways.
Considering the particular case of vineyards, the latest trends (EPPO 2016) have been focused on the use of the leaf wall area (LWA) method as the most accurate way to establish the relationship between canopy structure and the recommended amount of pesticide and water. This decision is based on important research results that demonstrate that it is beneficial for those types of crops (Gil et al. 2014a, b; Pergher and Petris 2008; Walklate and Cross 2012).
However, even if the canopy characteristics can be defined using the methods outlined, it is also clear that a certain amount of variability can be assumed to exist inside the parcel. When a uniform canopy structure is assumed for the whole parcel, differences in the total amount of pesticide arriving at the canopy can occur, which reduces the effectiveness of its application. Numerous studies using different electronic and manual measurement methods have demonstrated the importance of this variability in different types of specialty crops, with one of the most challenging aspects being achievement of variable rate application on specialty crops. Promising results have been obtained using onboard sensors such as LiDAR or ultrasonic sensors (Wei and Salyani 2005; Lee and Ehsani 2008; Llorens et al. 2011), showing in all cases a very close relationship between electronic and manual measurements. Alternatively, canopy characterization has also been investigated using remote sensing technologies. Grapes, orchards, and citrus trees have been characterized using remote sensors (de Castro et al. 2018). The canopy volume of trees in forests has also been measured (Mõttus et al. 2006; Le Maire et al. 2008) with different degrees of success. The use of remote systems in fields organized by parallel row lines has been challenged by Jeon et al. (2011), who argue that the scale of these remote sensing techniques is relatively large and, consequently, the sensing resolution may be insufficient for real-time variable rate application. Another aspect to be considered is the high resolution of these sensors, especially the LiDAR, and the large volume of the data to be processed, which prevents it from being possible to adapt it to be used for variable rate application in real time.
Accurate canopy characterization is linked, in most cases, with the promising concept of variable rate application. Assuming the objective is to maintain a constant application rate per unit of canopy, these developments on canopy measurements have been linked with research developments on modified sprayers that are able to modify the spray parameters (working pressure, nozzle flow rate, number of nozzles, etc.) according to the canopy characteristics, while maintaining a constant application rate per unit of canopy (Escolà et al. 2013; Gil et al. 2013; Du et al. 2008).
Canopy characterization becomes then, a crucial aspect for what is defined site-specific management strategies. Especially when georeferenced information about canopy structure and variability at the field scale is required (De Castro et al. 2018), the use of non-destructive and remote sensing technologies become a very useful alternative, offering the possibility of a rapid assessment of large areas (Hall et al. 2002; Johnson et al. 2003). Unmanned Aerial Vehicles (UAVs) have been widely used to carry remote sensing devices due their flexibility for flight scheduling, versatility and affordable management. Spatial information direct or indirectly linked with canopy characteristics or information about designed area as water status (Baluja et al. 2012), disease detection (Albetis et al. 2017) and canopy characterization (Ballesteros et al. 2015; Weiss and Baret 2017; Mathews and Jensen 2013; Poblete-Echeverría et al. 2017) can be recorded in a practical and efficient way. De Castro et al. (2018) developed a fully automatic process for vineyard canopy characterization self-adapted to different crop conditions, representing an important improvement in the canopy characterization process, generating a time-efficient, reliable and accurate method, avoiding potential errors inherent to the manual process.
UAVs embedded with specific devices for data acquisition have been tested in different conditions and crops with diverse results (Primicerio et al. 2012; Xiongkui et al. 2017; Matese et al. 2015; Patrick and Li 2017). The potential advantages of UAV for canopy characterization are linked to its capability for characterization of large areas, relatively low cost for functioning, great capability for recording large volumes of data, and potential to obtain a real picture from above, giving complementary information about the crop distribution over the measured area. Remote sensing, and more specifically NDVI (Rouse et al. 1973), has been widely studied and correlated with certain structural and physiological characteristics of vines. For example, LAI (leaf area index) was found strongly related to NDVI in vineyards (Johnson 2003; Johnson et al. 2003). On the other hand, pruning weight has been stablished as an in indicator of canopy density and vigour to delineate management zones related with vine size by means of vegetation indices (Johnson et al. 2001; Dobrowski et al. 2003).
However, even if it has been largely demonstrated the relationship between canopy characteristics and the optimal amount of pesticide/water volume during spray applications in specialty crops as vineyard, there is still a gap in the research focused in VRA in this kind of crops, where canopy structure and dimensions have been shown as one of the most affecting factors on the efficacy of the process.
The overall objective of this paper is to find a good correlation between data obtained from remote sensing technologies and canopy characteristics. The hypothesis is that NDVI is a good indicator of canopy vigor and consequently application volume can be varied by NDVI zones to maintain a roughly constant application coverage. The practical implications of that correlation will be shown in the form of a novel smart spray application device based on the principle of Variable Rate Application (VRA) adapted for vineyard plantations. The new developed technology will be able to follow a georeferenced prescription map obtained by combining the spatial canopy characterization together with the application of the modified method of LWA (Leaf Wall Area) generated by a newly developed Decision Support System (DSS) Dosaviña. The specific steps in this research were:
-
To obtain a canopy map identifying the zones with clear differences in vigour
-
To establish a prescription map (amount of liquid and pesticide) to be applied according to the previously defined canopy characteristic
-
To develop a modified conventional orchard sprayer adapted for automatic site-specific management during spray application
-
To evaluate the accuracy of the proposed method
The achieving the above objectives will improve the specific knowledge and available technologies to improve the spray application process in specialty crops as vineyard, including economic and environmental benefits derived from the potential reduction of the amount of pesticides and water.
Materials and methods
Experimental site
Trials were conducted in the heart of the viticulture zone of appellation of origin Penedès, one of the official wine-producing zones in Spain. A representative parcel of c.a. 5 ha was selected in El Pla del Penedès (X: 393.264,99 Y: 4.584.840,50 UTM31 ETRS89). Vineyards of variety Merlot were planted at 1.2 m distance in the row, and 2.8 m between rows, resulting in 2976 plants ha−1. Trellis system Double Royat was adopted with two lines of wires, as most representative in the zone. Trials were arranged at canopy between stage 75 (Berries pea-sized, bunches hang) and 77 (Berries beginning to touch) (Meier 1997).
Data acquisition for canopy characterization
Canopy characterization was done using a UAV that was properly adjusted and managed to conduct stable flight over the parcel. A hexacopter (model: DroneHEXA, Dronetools SL, Sevilla, Spain) was used. The drone was provided with two batteries (4S of 6000 mAh) and had a maximum autonomy of 15 min at full load of 2.5 kg and 25 min for the no-load case.
The hexacopter was loaded with a digital camera (model: RedEDGE, Micasense, Seattle, USA) equipped with a five-sensor matrix (1280 × 960), five lenses (5.5 m focal distance), and their corresponding filters. The function of each filter was to acquire the corresponding narrow band in the spectrum: three in the visible zone (red centred at 668 nm (R), green at 560 nm (G), and blue at 475 (B)); one in the RedEdge centred at 717 nm (RE); and the last one in the near infrared centred at 840 nm (NIR). The spectral bandwidths of each filter were 10 nm for R and RE, 20 nm for B and G, and 40 nm for NIR. Flight was conducted at 95 m above ground level (AGL) at a cruise flight speed of 6 m s−1. Overlapping zones were adjusted at 80% in the sense of flight and 60% in the transverse sense.
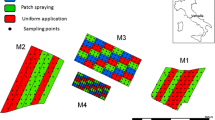
In order to obtain a complete range of data during the whole canopy season, three different flights with the UAV were additionally arranged at three different canopy stages, corresponding to Beginning of Flowering (BBCH 61), Berries Pea size (BBCH 75) and Beginning of ripening (BBCH 81), according Meier (1997). Previous to the first flight, a randomized process was established to identify a total of 69 sample points in the parcel (Fig. 1). Every single sample point, consisted on 1 m canopy row, was properly identified in the parcel in order to arrange a complete manual and remote canopy characterization after every single flight, with the main objective to determine the potential relationship between data obtained with remote sensing technology, and the actual canopy parameters, including Leaf Wall Area (LWA) \(\left( {{\text{m}}_{{_{\text{canopy}} }}^{2} \,{\text{ha}}^{ - 1} } \right)\) and TRV (Tree Row Volume) \(\left( {{\text{m}}_{{_{\text{canopy}} }}^{3} \,{\text{ha}}^{ - 1} } \right).\)

Regular sampling points distributed over the parcel
Adapted sprayer for variable rate application
The starting point for the development of the variable rate technology sprayer was a commercial multi-row orchard sprayer (model: Hardi Iris-2, Ilemo-Hardi, S.A.U., Lleida, Spain) with a 1 500 L tank trailed sprayer equipped with four lateral booms, each having eight nozzles, and able to spray two rows of vine simultaneously. The hydro-pneumatic sprayer was provided with a centrifugal fan offering an average air flow rate of 7 500 m3 h−1 (Gil et al. 2015). The original sprayer was modified in order to follow a prescription map. For this purpose, several elements were installed (Fig. 2):
-
One pressure sensor GEMS 1200 series (Gems Sensors & Controls, Plainville, USA) with the purpose of adjusting the required pressure according to the prescription map.
-
Two ultrasonic sensors Sonar Bero Compact II (Siemens AG, Munich, Germany) to detect presence/absence of vegetation along the canopy lines.
-
Four electro valves (Asco model S272, ASCO Neumatics, Rueil Malmaison, France) placed just at the feeding point of each vertical boom; the function of the electro valves was to shut-off the nozzle flow rate when the signal received from the ultrasonic sensors indicated no vegetation.
-
Electronic controller (Topcon Corporation, Tokyo, Japan), including GPS receiver model SGR-1, with a frequency up to 20 Hz, a X25 touchscreen and an automatic section controller ASC-10. The whole system was in charge to determine the exact sprayer position into the parcel, to calculate the desired volume rate, based on the previously uploaded prescription map, and to modify the working pressure in order to obtain the adjusted nozzle flow rate.
The modified sprayer operated according to the following two different scenarios:
-
a.
According to the position in the parcel detected by the GPS receiver, the system identifies the canopy characteristics and, from that, the recommended volume. At this point the embedded controller calculates the required working pressure and sends the order to the pressure controller in order to adjust the nozzle flow rate.
-
b.
If at a certain point in the parcel, the ultrasonic sensors detect absence of vegetation (end of the canopy row), the corresponding signal is transformed into a shut-off order to the electro valves, which turn off the entire flow rate of the vertical booms.

Variable rate application prototype
Decision support system to determine optimal volume rate
A decision support system (DSS, DOSAVIÑA®) (UMA-UPC 2018) was used to determine the optimal volume rate based on the canopy characteristics. The system (Gil et al. 2011; Gil and Escolà 2009) enables determination of the most accurate volume rate based on a modified version of the leaf wall area (LWA) method (Walklate and Cross 2012).
Methodology of the whole process
The entire process for variable application rate based on canopy vigour maps is illustrated in Fig. 3. Firstly, the orthophotomap created from the high-resolution imagery acquired with the drone, yielded a spatial resolution of 6.33 cm pixel−1 and was composed of the same five bands offered by the camera (R, G, B, RE, and NIR). The orthophotomap (Fig. 4a) was radiometrically calibrated using four grayscale standards placed in the field at the time of flight and visible in the image. Calibration curves were built with 22, 32, 44, and 51% grayscale reflectance standards for each of the spectral channels from the multispectral camera. The equations extracted from the calibration process were used to convert grayscale 12-bit digital numbers to reflectance values. The new reflectance images were then combined to calculate the normalized differential vegetation index (NDVI) (Rouse et al. 1973) (Eq. (1)).

Scheme of the whole process: from UAV vigour map to actual variable rate application map

a Orthophotomap of the parcel, b Vineyard mask
The NDVI is a normalized index with values from − 1 to 1, where photosynthetically active vegetation ranges from 0.2 to 1 (USGS 2018). As vineyards grow in rows, and weeds, soil, and shadows are not desired, vineyard-only pixels were segmented from the image based on a threshold from NDVI, which could ensure that pure vineyard-only vegetation pixels could be masked out of the image. The NDVI threshold to create the vineyard mask (Fig. 4b) was set to 0.35, and pixels above this threshold were considered vineyard pixels and coded as ‘1’, whereas pixels below the threshold were considered noise (soil, shadows, weeds, etc.) and set to ‘0’. Once the NDVI threshold was applied, an Inverse Distance Weighting interpolation (IDW) was performed to generate a continuous NDVI map. Final processing consisted on a value clustering in 3 NDVI levels, which was later smoothed by performing a neighbor median filtering to produce the final vigor map.
The process was executed using the QGIS software (QGIS Development Team, 2016. QGIS Geographic Information System. Open Source Geospatial Foundation. URL http://qgis.osgeo.org).
Once the vigour map was created with the three different zones, they were identified in the parcel, corresponding to low, medium, and high canopy vigour. For each of the zones, 15 manual measurements were systematically taken in order to have a complete canopy characterization (Table 1). The obtained values were then entered into the dedicated software application DOSAVIÑA® (Gil and Escolà, 2009; Gil et al. 2011) in order to obtain the recommended volume rate. Based on recommendations, the selected applied volumes were 260 L ha−1, 205 L ha−1, and 150 L ha−1, for high, medium and low vigour canopy zones, respectively.
Once the three different volume rates were calculated, the corresponding values were introduced into the georeferenced canopy vigour map using the specific software QGIS. Following this procedure, it was then possible to generate the georeferenced prescription map. The generated map was transferred via USB to the X25 touch screen previously described and installed into the sprayer. Specific data concerning dedicated working parameters for each vigour zone was also uploaded into the system (Table 1). In all cases forward speed was maintained constant around 6 km h−1; also, the number and nozzle type were maintained constant in all the cases, using hollow cone nozzles Albuz ATR (Albuz Saint-Gobain, Evreux, France). In order to adapt the requested application rate, only the working pressure was automatically modified, always maintaining the values inside the recommended range provided by nozzle manufacturer.
The spraying process began when all the parameters and information (canopy vigour map, prescription map, and working conditions) were uploaded into the embedded controller. During the spraying process the system recorded, information concerning the sprayer position in the parcel, the applied volume rate, and the adjusted working pressure.
In order to simplify the process, the system was programmed to apply the same amount of liquid on the two simultaneously sprayed rows, avoiding differences between left and right side of the sprayer during the circulation over the rows.
Developed methodology for comparison of prescription versus actual application map
On generating the actual application map after the spray pass, the actual and objective maps were compared in order to evaluate the precision of the system; QGIS software (QGIS Development Team 2016) was used for this purpose.
For the comparison process, a random net of circa 100 000 points were developed (Fig. 5). For every single point, information about prescription value and actual application rate was compared individually. Then, for the total number of sample points, the RMSE was calculated according to Eq. (2):
where r is the expected value; and p is the obtained value (actual).

Randomized distribution of selected points for comparing actual and intended spray application maps
Furthermore, a specific comparison process was designed for each of the 100 000 randomly defined points. For every value of expected value ‘r’, 11 intervals of tolerance were assigned (each representing an increase of 5% compared with the previous one). The defined intervals ranged from zero to 50% deviation. Each point was compared and quantified for its coincidence between p and r values. In addition, a determination was made as to whether the p value was inside the calculated range [r − i, r + i]. Once all the points were compared, the percentage of coincidence was also calculated.
Finally, in order to visualize the level of accuracy of the actual spray application map, a specific interpolation process based on the inverse distance weighed (IDW) method was applied.
Results and discussion
Correlation between NDVI and canopy characteristics
According the overall objective of this research, data obtained with multispectral camera were evaluated in order to find a proper relationship with one or several canopy parameters obtained after an accurate manual characterization of the canopy. Table 2 shows the average values of main canopy parameters (including NDVI) for the three canopy stages analysed. A deep analysis of the obtained data from the 69 sample points evaluated in the parcel indicated a good correlation between canopy area, expressed as TRV \(\left( {{\text{m}}_{{_{\text{canopy}} }}^{3} \,{\text{ha}}^{ - 1} } \right)\) and a dedicated index generated after the combination of NDVI and the projected area measured by the UAV (Fig. 6). The obtained results after 69 measuring points at the three different crop stages demonstrated that the proposed remote canopy characterization offers interesting results, directly related with the latest proposal to determine a common canopy parameter (EPPO 2016).

Relationship between TRV (manual measurements) and NDVI*Projected area (remote sensing determination). Values obtained after measurements at three different crop stages (BBCH 61, 75 and 81) at the 69 defined measuring points
Once the relationship between NDVI and canopy characteristic was established, the three different identified zones in the parcel were quantified and classified according their main characteristics (Table 3).
Considering the previous relationship, the intended procedure of development of canopy vigour map, prescription map and actual application map was developed in order to achieve the variable application rate global procedure.
Developed maps
This subsection presents and discusses the maps generated during the process. The sequence of the obtained maps was as follows: (1) NDVI map, (2) canopy vigour map, (3) prescription map, and (4) actual application map (Fig. 7).

Obtained maps: a raw only vegetation NDVI map superimposed on the false colour infrared image; b canopy vigour map; c prescription map; d actual variable application map
NDVI map
Data obtained from the multispectral camera embedded in the UAV was used to generate the NDVI map (Fig. 7a). This map shows how the intensity of colour was captured by the camera, being the first step for determining the different canopy vigour zones.
Canopy vigour map
Once the NDVI map was developed, all the data were appropriately managed and classified in order to distinguish the three clearly different zones in the parcel. The three zones were plotted on the map (Fig. 7b) with three different colours, assigning specific canopy parameter to each zone (Table 1). Taking the NDVI map as the starting point, 15 complete manual characterization of the canopy were made in each zone, establishing the corresponding correlation between NDVI and canopy parameters (canopy height, canopy width) and the subsequent values of LWA (m2 canopy ha−1). Table 1 shows the obtained results per zone. According to the obtained values, the total area of the parcel (5.05 ha) was distributed as follows: 21.5% (1.09 ha) for low canopy vigour, 63.9% (3.23 ha) for medium canopy vigour, and 14.6% (0.73 ha) for high canopy vigour (Fig. 7b).
Prescription map
The three defined zones identified in the canopy vigour map were used as the starting point to determine the optimal volume rate to be sprayed. For the process to transform LWA into the corresponding L ha−1, the special DSS DOSAVIÑA® was used (UMA-UPC, 2018). The functioning principle of DOSAVIÑA for calculating the optimal volume rate (Gil and Escolà 2009; Gil et al. 2011) is based on a modified method of the Leaf Wall Area (LWA) principle, which has been recently proposed by EPPO (2016) as the recommended and harmonized method for dose expression in uniform wall 3D crops. Modifications from the original LWA method consisted in the introduction of important canopy parameters as canopy width and canopy density. Additionally, the dedicated DSS introduces a quantification of the efficacy of the spraying process considering the type of sprayer. This new developed tool was used during the research to determine the optimal volume rate for the different identified zones in the parcel.
From that, the intended prescription map was generated (Fig. 7c). In this case, the corresponding obtained values were 150 L ha−1 for low canopy vigour, 206 for medium canopy vigour, and 260 L ha−1 for high canopy vigour.
Actual variable application map
Once the prescription map was embedded into the controller installed on the sprayer, the spray application process started. During the process, data associated with the georeferenced position of the sprayer, actual working pressure, and forward speed were automatically recorded and saved in the dedicated software. Following further processing of the saved data the actual application map was generated (Fig. 7d). A detailed analysis of this map facilitates explanation of certain characteristics. The actual application map is divided into small and irregular rectangles. The common dimension was the width of the rectangle, and was assigned to 5.6 m. This length corresponds to the working width of the sprayer (two simultaneous rows at 2.8 m row distance). The decision was made to maintain the same application rate on both sides of the sprayer in order to simplify the process. The length of the rectangles varied depending on the detected changes on canopy vigour, with a maximum length of 5.6 m, as programmed in the software.
The white lines observed in the actual application map (Fig. 7d) correspond to internal roads in the parcel. As the spraying process was continuous, in those zones without the presence of canopy, the spraying process was automatically turned-off according to the signal detected by the ultrasonic sensors installed on both sides of the sprayer.
Quantification of the accuracy of the system
Following generation of the actual application map, the mathematical procedure outlined below was used to evaluate and quantify the accuracy of the process. As will be seen, the results obtained indicated that the developed system had exceptionally good accuracy, quantified by the comparison between the actual spray application rate and the intended application rate.
The obtained value of RMSE for the whole group of 100 000 sample points was 24.4. RMSE is a good statistical tool for comparison analysis. However, in this case there is no previous research were similar procedure has been applied, being difficult to evaluate the goodness of the obtained value. For this reason, an alternative method to quantify the correspondence between prescription and actual map was proposed. A range of eleven different thresholds was established, from 0 to 50% tolerance. The most restrictive threshold (0%) measured the percentage of points (out of 100 000) where there was no difference between the intended and actual application rate. On the opposite extreme, the highest tolerance (50%) quantified the percentage of points where variations of ± 50% of applied volume was detected. This last case is explained as follows: for the intended value of 150 L ha−1 (low case), the areas were the actual spray application rate ranged from 75 to 225 L ha−1 were counted; for medium application rate (206 L ha−1), the counted range was from 103 L ha−1 to 309 L ha−1; and, for the highest intended spray application rate (260 L ha−1) the measured range was from 130 L ha−1 to 390 L ha−1. Table 4 shows the complete range of thresholds applied during the accuracy evaluation process.
Figure 8 shows the spatial distribution of the accuracy in the parcel, classified according the established threshold level, ranging from 0 to 50%. The dark zones on the maps indicate the areas where the accuracy of the system exceeded the established thresholds. The main percentage of dark zones corresponds to transition zones, where the variable application sprayer was forced to modify the working parameters (working pressure) while maintaining the forward speed. During the data processing, some outsider cases were also detected. In a small number of points, differences greater than 50% between intended and actual spray application rate were detected. A small percentage of the total measured area (1.2%) was identified as the worst cases. Those zones correspond to values were the spray application rate (Table 3) fell lower than 75 L ha−1 (less than 50% of the lower recommended application rate of 150 L ha−1) and were higher than 390 L ha−1 (50% over the highest recommended value of 260 L ha−1). Those extreme values correspond to the zones where sudden and important changes in the forward speed of the tractor were necessary for manoeuvrability (such as changing rows and driving direction).

Spatial distribution of accuracy for different degrees of tolerance (intended vs. actual application)
Figure 9 presents the percentage of established points for comparison included on each threshold. Assuming as the highest requested accuracy from the practical point of view a maximum deviation of ± 10%, 83.2% of the total of 100 000 comparative points (see Fig. 5) were classified as successful points, whereas when the requested accuracy fell to 30%, 96.8% of the measured points were classified as successful points.

Percentage of points according to the tolerance (intended vs. actual application)
Quantification of savings
The actual spraying application map obtained following the variable rate application procedure, was compared with the standard application map based on a constant volume rate of 325 L ha−1, the normal volume rate selected by the farmer for conventional spray application. For those two scenarios, the total time for the spray process, the amount of water, and the number of tanks to be filled were calculated, and the hypothetical amount of active ingredient (a.i) were compared in order to quantify the savings. The potential savings in terms of active ingredient were calculated assuming 0.4% copper concentration (400 g h L−1) as the common dose recommendation in viticulture. Time saving was calculated assuming an average time of 45 min for the filling and mixing process of every tank. Table 5 shows the absolute and relative values for the following cases: conventional spray application, variable rate spray application, and variable rate spray application with ultrasonic sensors. In this last case, savings were also calculated for the specific zones where the sprayer was turned-off (internal rows in the parcel) according the received signal from the sensors.
The results clearly show the positive effect of the variable rate application process. The total amount of liquid applied in the 5 ha parcel was reduced by 44.3% and 47.3% using the developed site-specific management sprayer, without and with US sensors, respectively. The corresponding saving in terms of time was approximately 45 min for both cases, equivalent to circa 9 min ha−1. Finally, the potential savings on active ingredient were 3.1 kg and 2.9 kg, with and without ultrasonic sensors, respectively.
Conclusions
The results obtained in this study indicate that a bright future is ahead with the application of new remote techniques for canopy characterization. Further, they demonstrate the interesting possibilities of the variable application rate for specialty crops as vineyard, allowing to improve the use of plant protection products. The obtained results can be directly linked with the objectives established in the European Directive for Sustainable Use of Pesticides (EU 2009). For the overall study, the following conclusions can be drawn:
-
The research showed potential savings in pesticide, water and time, by adapting a variable rate application over a vineyard parcel based on canopy maps. This fact has been largely developed in the past for field crop sprayers, but it represents a clear improvement in the spray application process in specialty crops.
-
The use of a multiespectral camera embedded in a UAV enabled the acquisition of an accurate canopy vigour map of a parcel, with a potential capability for distinguishing zonal differences.
-
Interesting correlation was observed between TRV and a combination of NDVI and the projected area of the canopy obtained by the UAV. However, it is interesting to remark the differences between the different crop stages it terms of estimation of vegetation. Early crop stages seem more difficult to predict than large canopy densities.
-
The canopy vigour map was easily transformed into a prescription map by using the dedicated decision support system DOSAVIÑA®
-
It was possible to develop a specific software application to upload the prescription map for a certain parcel of vineyard into a modified sprayer for the variable application process. This will enable improved spray application for field crops, which are widely disseminated, and is a novelty for 3D crops such as vineyard crops.
-
Excellent accuracy was obtained with the system (demonstrated by comparing the intended and actual application maps), with assumed tolerances of around 10% deviation.
-
The proposed method for accuracy quantification resulted in an objective, practical, and useful procedure for those types of data.
-
Savings on water and pesticide of over 40% were quantified. However, the saving concerning the total amount of pesticide can be expected only for the cases where dose recommendation on the pesticide label is based on concentration.
Overall, this study demonstrated that improvements arise from the combination of canopy characteristics, intra-parcel variability, new technologies for variable application rate, and the latest developments linked with the use of UAV in agriculture.
References
Albetis, J., Duthoit, S., Guttler, F., Jacquin, A., Goulard, M., Poilvé, H., et al. (2017). Detection of Flavescence dorée grapevine disease using Unmanned Aerial Vehicle (UAV) multispectral imagery. Remote Sensing, 9, 308.
Ballesteros, R., Ortega, J. F., Hernández, D., & Moreno, M. Á. (2015). Characterization of Vitis vinifera L. canopy using unmanned aerial vehicle-based remote sensing and photogrammetry techniques. American Journal of Enology and Viticulture, 66(2), 120–129.
Balsari, P., Doruchowski, G., Marucco, P., Tamagnone, M., Van de Zande, J., & Wenneker, M. (2008). A system for adjusting the spray application to the target characteristics. Agricultural Engineering International: CIGR Journal, XS, 1–11.
Baluja, J., Diago, M. P., Balda, P., Zorer, R., Meggio, F., Morales, F., et al. (2012). Assessment of vineyard water status variability by thermal and multispectral imagery using an Unmanned Aerial Vehicle (UAV). Irrigation Science, 30, 511–522.
Carvalho, F. P. (2017). Pesticides, environment, and food safety. Food and Energy Security, 6(2), 48–60.
Codis, S., Douzals, J. P., Davy, A., Chapuis, G., Debuisson, S., & Wisniewski, N. (2012). Doses de produits phytos autorisées sur vigne en Europe, vont-elles s’harmoniser? Phytoma, 656, 37–41.
Damalas, C. A., & Eleftherohorinos, I. G. (2011). Pesticide exposure, safety issues, and risk assessment indicators. International Journal of Environmental Research and Public Health, 8(5), 1402–1419.
de Castro, A. I., Jiménez-Brenes, F. M., Torres-Sánchez, J., Peña, J. M., Borra-Serrano, I., & López-Granados, F. (2018). 3-D characterization of vineyards using a novel UAV imagery-based OBIA procedure for precision viticulture applications. Remote Sensing, 2018(10), 584. https://doi.org/10.3390/rs10040584.
Doruchowski, G., Balsari, P., & Van de Zande, J. C. (2009). Development of a crop adapted spray application system for sustainable plant protection in fruit growing. In Proceedings of international symposium on application of precision agriculture for fruits and vegetables, Orlando, FL, USA.
Dobrowski, S., Ustin, S., & Wolpert, J. (2003). Grapevine dormant pruning weight prediction using remotely sensed data. Australian Journal of Grape and Wine Research, 9, 177–182.
Du, Q., Chang, N. B., Yang, C., & Srilakshmi, K. R. (2008). Combination of multispectral remote sensing, variable rate technology and environmental modeling for citrus pest management. Journal of Environmental Management, 86(1), 14–26.
EFSA (European Food Safety Authority). (2018). The 2016 European Union report on pesticide residues in food. EFSA Journal, 16(7), 5348. https://doi.org/10.2903/j.efsa.2018.5348.
EPPO (European Plant Protection Organization). (2012). Dose expression for plant protection products. Bulletin OEPP/EPPO Bulletin, 42(3), 409–415. https://doi.org/10.1111/epp.12000.
EPPO (European Plant Protection Organization). (2016). Conclusions and recommendations. Plenary session. Workshop on harmonized dose expression for the zonal evaluation of plant protection products in high growing crops. Vienna. Retrieved from https://www.eppo.int/media/uploaded_images/MEETINGS/Conferences_2016/dose_expression/Conclusions_and_recommendations.pdf
Escolà, A., Rosell-Polo, J. R., Planas, S., Gil, E., Pomar, J., Camp, F., et al. (2013). Variable rate sprayer Part 1—Orchard prototype: design, implementation and validation. Computers and Electronics in Agriculture, 95, 122–135. https://doi.org/10.1016/j.compag.2013.02.004.
EU. (2009). Directive 2009/128/EC of the European Parliament and of the Council of 21 October 2009 Establishing a Framework for Community Action to Achieve the Sustainable Use of Pesticides; 2009/128/EC (p. 2009). Bruxelles, Belgium: European Parliament.
Garcerá, C., Fonte, A., Moltó, E., & Chueca, P. (2017). Sustainable use of pesticide applications in citrus: A support tool for volume rate adjustment. International Journal of Environmental Research and Public Health, 14(7), 715.
Gil, E., Arnó, J., Llorens, J., Sanz, R., Llop, J., Rosell-Polo, J. R., et al. (2014a). Advanced technologies for the improvement of spray application techniques in Spanish viticulture: An overview. Sensors, 14(1), 691–708. https://doi.org/10.3390/s120100691.
Gil, E., & Escolà, A. (2009). Design of a decision support method to determine volume rate for vineyard spraying. Applied Engineering in Agriculture, 25(2), 145–151.
Gil, E., Escolà, A., Rosell, J. R., Planas, S., & Val, L. (2007). Variable rate application of plant protection products in vineyard using ultrasonic sensors. Crop Protection, 26, 1287–1297.
Gil, E., Gallart, M., Llorens, J., Llop, J., Bayer, T., & Carvalho, C. (2014b). Spray adjustments based on LWA concept in vineyard. Relationship between canopy and coverage for different application settings (pp. 25–32). Oxford, UK: International Advances in Pesticide Applications.
Gil, E., Llop, J., Gallart, M., Valera, M., Llorens, J. (2015). Design and evaluation of a manual device for air flow rate adjustment in spray application in vineyards. A: Workshop on spray application techniques in fruit growing. In: Proceedings of the Suprofruit 2015—13th Workshop on Spray Application in Fruit Growing. Linday: p. 8-9.
Gil, E., Llorens, J., Landers, A., Llop, J., & Giralt, L. (2011). Field validation of DOSAVIÑA, a decision support system to determine the optimal volume rate for pesticide application in vineyards. European Journal of Agronomy, 35(1), 33–46. https://doi.org/10.1016/j.eja.2011.03.005.
Gil, E., Llorens, J., Llop, J., Escolà, A., & Rosell-Polo, J. R. (2013). Variable rate sprayer. Part 2—Vineyard 1 prototype: Design, implementation and validation. Computers and Electronics in Agriculture, 95, 136–150. https://doi.org/10.1016/j.compag.2013.02.010.
Hall, A., Lamb, D. W., Holzapfel, B., & Louis, J. (2002). Optical remote sensing applications in viticulture—A review. Australian Journal of Grape and Wine Research, 8, 36–47.
Jeon, H. Y., Zhu, H., Derksen, R., Ozkan, E., & Krause, C. (2011). Evaluation of ultrasonic sensor for variable—Rate spray applications. Computers and Electronics in Agriculture, 75(2011), 213–221.
Johnson, L. (2003). Temporal stability of an NDVI-LAI relationship in a Napa Valley vineyard. Australian Journal of Grape and Wine Research, 9, 96–101. https://doi.org/10.1111/j.1755-0238.2003.tb00258.x.
Johnson, L., Bosch, D., Williams, D., & Lobitz, B. (2001). Remote sensing of vineyard management zones: Implications for wine quality. Applied Engineering in Agriculture, 17, 557–560. https://doi.org/10.13031/2013.6454.
Johnson, L. F., Roczen, D. E., Youkhana, S. K., Nemani, R. R., & Bosch, D. F. (2003). Mapping Vineyard leaf area with multispectral satellite imagery. Computers and Electronics in Agriculture, 38, 37–48.
Le Maire, G., François, C., Soudani, K., Berveiller, D., Pontailler, J., Bréda, N., et al. (2008). Calibration and validation of hyperspectral indices for the estimation of broadleaved forest leaf chlorophyll content, leaf mass per area, leaf area index and leaf canopy biomass. Remote Sensing of Environment, 112, 3846–3864.
Lee, K., & Ehsani, R. (2008). A laser-scanning system for quantification of tree-geometric characteristics (p. 083980). St. Joseph, MI, ASABE Paper No: ASABE.
Llorens, J., Gil, E., Llop, J., & Escolà, A. (2011). Ultrasonic and LIDAR sensors for electronic canopy characterization in vineyards: advances to improve pesticide application methods. Sensors, 11(2), 2177–2194. https://doi.org/10.3390/s110202177.
Matese, A., Toscano, P., Di Gennaro, S., Genesio, L., Vaccari, F., Primicerio, J., et al. (2015). Intercomparison of UAV, Aircraft and Satellite Remote Sensing Platforms for Precision Viticulture. Remote Sensing, 7(3), 2971–2990.
Mathews, A. J., & Jensen, J. L. R. (2013). Visualizing and quantifying vineyard canopy LAI using an Unmanned Aerial Vehicle (UAV) collected high density structure from motion point cloud. Remote Sensing, 5, 2164–2183.
Meier, U. (1997). BBCH-Monograph. Growth stages of plants - Entwicklungsstadien von Pflanzen - Estadios de las plantas - Développement des Plantes. Blackwell Wissenschaftsverlag, Berlin und Wien. 622 p
Miranda-Fuentes, A., Llorens, J., Rodriguez-Lizana, A., Cuenca, A., Gil, E., Blanco-Roldán, G. L., et al. (2016). Assessing the optimal liquid volume to be sprayed on isolated olive trees according to their canopy volumes. Science of the Total Environment, 568(2016), 269–305.
Mõttus, M., Sulev, M., & Lang, M. (2006). Estimation of crown volume for a geometric radiation model from detailed measurements of tree structure. Ecological Modelling, 198, 506–514.
Palleja, T., Landers, A. (2015). Precision fruit spraying: measuring canopy density and volume for air and liquid control. SuproFruit 2015 – 13th workshop on spray application in fruit growing, Lindau, Germany, 15–18 July 2015. Julius-Kühn-Archiv, 448.
Patrick, A., & Changying, L. (2017). High throughput phenotyping of blueberry bush morphological traits using Unmanned Aerial Systems. Remote Sensing, 2017(9), 1250. https://doi.org/10.3390/rs9121250.
Pergher, G., Petris. R. (2008). Pesticide Dose Adjustment in Vineyard Spraying and Potential for Dose Reduction. Agricultural Engineering International: The CIGR Ejournal. Manuscript ALNARP 08 011. Vol. X.
Poblete-Echeverría, C., Olmedo, G. F., Ingram, B., & Bardeen, M. (2017). Detection and segmentation of vine canopy in ultra-high spatial resolution rgb imagery obtained from Unmanned Aerial Vehicle (UAV): A case study in a commercial vineyard. Remote Sens., 9, 268.
Primicerio, I., Di Gennaro, S. F., Fiorillo, E., Genesio, L., Lugato, E., Matese, A., et al. (2012). A flexible unmanned aerial vehicle for precision agriculture. Precision Agriculture, 13(4), 517–523.
Rosell, J. R., & Sanz, R. (2012). A review of methods and applications of the geometric characterization of tree crops in agricultural activities. Computers and electronics in agriculture, 81, 124–141.
Rouse, J. W., R. H. Haas, J. A. Schell, and D. W. Deering. (1973). Monitoring vegetation systems in the Great Plains with ERTS, Third ERTS Symposium, NASA SP-351 I, 309-317.
Salcedo, R., Garcerá, C., Granell, R., Molto, E., & Chueca, P. (2015). Description of the airflow produced by an air-assisted sprayer during pesticide applications to citrus. Spanish Journal of Agricultural Research, 2, 4.
Solanelles, F., Planas, S., Escolà, A., & Rosell, J. R. (2002). Spray application efficiency of an electronic control system for proportional application to the canopy volume. International advances in pesticide application 2002. Aspects of Applied Biology, 66, 139–146.
Solanelles, F., Planas, S., Rosell, J. R., Camp, F., & Gràcia, F. (2006). An electronic control system for pesticide application proportional to the canopy width of tree crops. Biosystems Engineering, 95(4), 473–481.
Toews, B., & Friessleben, R. (2012). Dose rate expression—Need for harmonization and consequences of the Leaf Wall Area approach. Aspects of Applied Biology, 114, 2012. https://doi.org/10.1007/s10341-012-016-z.
UMA-UPC. (2018). DOSAVIÑA®. Decision Support System for determining the optimal volume rate in vineyard. Retrieved August 2018, from https://dosavina.upc.edu.
USGS (2018). NDVI, the Foundation for Remote Sensing Phenology. Retrieved August 2018, from https://phenology.cr.usgs.gov/ndvi_foundation.php.
Walklate, P., & Cross, J. (2012). An examination of leaf-wall-area dose expression. Crop Protection, 35, 132–134.
Wei, J., & Salyani, M. (2005). Development of a laser scanner for measuring tree canopy characteristics: Phase 2. Foliage density measurement. Transactions of ASAE, 48(4), 1595–1601.
Weiss, M., & Baret, F. (2017). Using 3D point clouds derived from UAV RGB imagery to describe vineyard 3D macro-structure. Remote Sensing, 9, 111.
Xiongkui, H., Bonds, J., Herbst, A., & Langenakens, J. (2017). Recent development of unmanned aerial vehicle for plant protection in East Asia. International Journal of Agricultural and Biological Engineering, 10(3), 18–30.
Acknowledgements
The authors sincerely wish to thank Andreu Piñol, Topcon Positioning Spain S.L.U., Ilemo-Hardi, S.A.U., and AgriArgo Ibérica, S.A.
Funding
This research was partially funded by the “Ajuts a les activitats de demostració (operació 01.02.01 de Transferència Tecnològica del Programa de desenvolupament rural de Catalunya 2014–2020)” and an FI-DGR Grant from Generalitat de Catalunya (2018 FI_B1 00083). Research and improvement of Dosaviña have been developed under LIFE PERFECT project: Pesticide Reduction using Friendly and Environmentally Controlled Technologies (LIFE17 ENV/ES/000205).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Campos, J., Llop, J., Gallart, M. et al. Development of canopy vigour maps using UAV for site-specific management during vineyard spraying process. Precision Agric 20, 1136–1156 (2019). https://doi.org/10.1007/s11119-019-09643-z
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11119-019-09643-z