
Abstract
Analytical solutions of the generalized nonlinear Schrödinger with four powers of nonlinearity for description of propagating pulses in optical fiber are presented. Optical solitons corresponding to the mathematical model are given. Conservation laws of the generalized model for propagation pulses with four powers of nonlinearity are written. To the best of our knowledge, the conservation laws obtained have not yet been presented in literature. The equation investigated generalizes several well-known models, which allows us to evaluate the influence of various processes on pulse propagation. Conservative quantities for the bright optical soliton, corresponding to its power, momentum and energy, are calculated. The analytical expressions for conservative quantities obtained can be applied to check whether numerical schemes for the explored equation are conservative.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
In this paper we study the equation in the form (Kudryashov 2019)
where q(x, t) is a complex function, \(i^2=-1\), \(n\in {\mathbb {Z}},\) a, \(b_1\), \(b_2\), \(b_3\) and \(b_4\) are parameters of Eq. (1). \(n \ne -1\) (if \(b_1 \ne 0\)), \(n \ne -2\) (if \(b_2 \ne 0\)), \(n \ne 2\) (if \(b_3 \ne 0\)), \(n \ne 1\) (if \(b_4 \ne 0\)).
Equation (1) has been proposed by Kudryashov in (2019) and it is known as the Kudryashov model (Biswas et al. 2020d; Raheel et al. 2023; Sonmezoglu et al. 2022; Yıldırım et al. 2020; Zayed et al. 2020a, 2020c). Equation (1) does not pass the Painlevé test (Kudryashov 2019) and the Cauchy problem for this equation cannot be solved by the inverse scattering transform. However, taking into account the traveling wave reduction (for more recent examples of the search for soliton solutions of PDEs see, for instance, Biswas et al. 2018; Triki et al. 2022a, 2022b; Yıldırım 2019a, 2019b, 2021; Yıldırım and Yaşar 2017) one can find periodic and solitary wave solutions of Eq. (1) in the form of optical solitons, which have recently been found in a number of papers (see, for example, Arnous et al. 2021; Arshed and Arif 2020; Arshed et al. 2021, 2022; Biswas et al. 2019, 2020a, 2020b, 2020e; Hu and Yin 2022; Kai and Li 2023; Kudryashov 2020b, 2020d, 2020f, 2021d, 2021e; Kudryashov and Antonova 2020; Kumar et al. 2020; Li and Wang 2022; Raheel et al. 2022a; Raza et al. 2021; Zayed and Alngar 2021; Zayed et al. 2020d, 2021b, 2021e). Without stopping at a detailed analysis of optical solitons, which are solutions of Eq. (1), we note that Eq. (1) generalizes a number of well-known equations used to describe impulses in optical media. It is obvious that Eq. (1) at \(n=1\), \(b_2=0\), \(b_3=0\) and \(b_4=0\) is the famous non-linear Schrödinger equation, which was the first mathematical model that was proposed to describe the optical solitons (Hasegawa and Tappert 1973a, b; Tai et al. 1986).
As we have previously mentioned, optical soliton solutions described by Eq. (1) are currently well-investigated. However, to the best of our knowledge, conservation laws corresponding to Eq. (1) have not been studied yet to date. Conservative quantities of partial differential equations are often applied to check whether numerical schemes used for solving partial differential equations are conservative (see, for example, Bayramukov and Kudryashov (2024). To analytically calculate conservative quantities for the solitary wave one must first find an explicit expression for the solitary wave solution and the conservation law of the equation, therefore we also present them in this work. The aforementioned discussion explains why it is significant to look for conservation laws of the proposed equation. Thus, the main purpose of this paper is to present conservation laws of Eq. (1) by means of direct calculations and find conserved quantities corresponding to its soliton solution.
It is well known that we say there exists the conservation law corresponding to Eq. (1), if we can write this equation in the form
where \(T\equiv T_j(u,u_x,u_t,\ldots ,x,t)\) is the density and \(X_j\equiv X(u,u_x,u_t,\ldots ,x,t)\) is the flux.
Integrating Eq. (2) with respect to x, we get the conservative quantity of the density as follows (Alshehri et al. 2022a, Alshehri et al. 2022b; Alshehri and Biswas 2022; Arnous et al. 2022; Biswas et al. 2020c, 2021a, 2021b; Kivshar and Agrawal 2003; Kivshar and Malomed 1989; Kivshar and Pelinovsky 2000; Kudryashov et al. 2022; Olver 1993; Serkin and Belyaeva 2018; Vega-Guzman et al. 2021; Yıldırım et al. 2021; Zayed et al. 2020b, 2021a, 2021c2021d, 2021f)
One can see that \(I_j\) is the conservative quantity for the solution q(x, t).
This paper is organized as follows. Periodic and solitary wave solutions of Eq. (1) are given in Sect. 2. Bifurcations of phase portraits of the traveling wave reduction of Eq.(1) are presented in Sect. 3. In Sects. 4, 5 and 6 we obtain conservation laws corresponding to Eq. (1). In Sect. 7 conservative quantities of optical soliton of Eq. (1) are calculated.
2 Optical solitons of equation
The Cauchy problem for Eq. (1) cannot be soled by the inverse scattering transform (Kudryashov 2019). However the optical soliton of Eq. (1) can be found using the traveling wave solutions. These solutions can be found using special methods (see, for example, (Alotaibi 2021; Biswas et al. 2021c, 2022; Ege 2022; Ekici 2022; Eldidamony et al. 2022a, 2022b; González-Gaxiola 2022; Kudryashov 1990, 1991, 2005, 2009, 2012, 2020a, 2020c, 2020e, 2021a, 2021b, 2021c, 2022a,2022b, 2022c; Ozisik et al. 2022; Raheel et al. 2022b; Vitanov 2010, 2011a, 2011b; Vitanov and Dimitrova 2010; Vitanov et al. 2010; Wang 2022a, 2022b; Zayed et al. 2022).
We take into account traveling wave solutions in the form
where y(z), \(\psi (z)\) are new functions and \(z=x-C_0\,t\).
Substituting (4) into Eq. (1), we obtain the system of equations for imaginary and real part as the following (Kudryashov 2019)
and
Equation (5) can be integrated after being multiplyed by y(z). We have
where \(C_1\) is an arbitrary constant.
Substituting \(\psi _z\) into (6), we get the second-order differential equation for y(z) in the form
Multiplying Eq. (8) by \(y_z\) and integrating the resulting expression with respect to z, we have at \(n \ne -1\), \(n \ne -2\), \(n \ne 1\) and \(n \ne 2\) the first integral as follows (Kudryashov 2019)
Some partial cases of Eq. (9) were considered in the paper by Kudryashov in 2019). Here, let us consider Eq. (9) at \(C_1=0\) and \(C_2=0\) using the new variable in the form (Kudryashov 2019)
Substituting the expression (4) into Eq. (9), we have the equation
where \(\mu \), \(\beta \), \(\nu \), \(\alpha \) and \(\delta \) are determined as follows
The general solution of Eq. (11) is expressed via the Jacobi elliptic sine in the form (Kudryashov 2020b, 2020d, 2020f, 2021d, 2021e)
where
and \(V_1\), \(V_2\), \(V_3\) and \(V_4\) are roots of the following algebraic equation
These real roots satisfy the following constraints
Taking into account (4), (10) and (13), we get the periodic solution of Eq. (1) in the form
In the case of \(V_1=V_2\), we have \(S^2=1\) and the elliptic sine is reduced to the hyperbolic tangent. From the solution (13) we obtain the solitary wave solution in the form
Using (4), (10) and (21), we have the bright and dark soliton of Eq. (1) as follows
In particular, the optical soliton of Eq. (1) can be found by looking for the solution of Eq. (9) at \(b_3=b_4=C_1=C_2=0\) in the form (see E_{{{\text{MP}}}} 2020c, 2020e, 2021c, 2022a)
where \(z_0\) is a constant and parameters \(\mu \), \(\beta \) and \(\nu \) are determined by (12). Some other optical solitons have been obtained in the paper by Kudryashov in (2019).
3 Bifurcations of phase portraits of the system (8)
In this section we plot several partial cases of phase portraits of the studied system (8). In rewrite it as
Let us observe the first partial case. We write the equation explored at \(n=1\), \(C_1=0\) and \(b_4=0\)
The first integral of the system (25) is written in a following way
Equilibrium points of Eq. (25) are located on the v axis and with the coordinate defined by the following cubic equation

Phase portraits for the first case

Phase portraits for the first case
Equation (27) may have at most three roots. Let us denote them as \(y_{1s}, \ y_{2s}, \ y_{3s}\). Provided that the root \(y_{is}\) is real, the stability of an equilibrium point \((y_{is},0)\) is determined by the eigenvalues of the following matrix
The eigenvalues of (28) are as follows
Thus, if \(f_1(y)\) increases at the point \(y_{is}\), then an equilibrium is a saddle, if it decreases at that point, then it is a center, otherwise it is a degenerate equilibrium. Having said that, we can propose the following classification of equilibria, depending on the parameter values and the sign of the discriminant \(D_1\) of Eq. (27):
-
1.
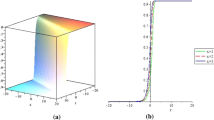
\(D_1>0, \hspace{5.0pt}-{b_1}/{a}>0\). Equation (25) has three equilibria on the v axis with coordinates \(y_{1\,s},\ y_{2\,s}, \ y_{3\,s}\) (we assume \(y_{1\,s}<y_{2\,s}<y_{3\,s}\)), out of which left and right equilibria are saddles and the middle one is a center (Fig. 1a-b).
-
2.
\(D_1>0, \hspace{5.0pt}-{b_1}/{a}<0\). Equation (25) has three equilibria on the v axis with coordinates \(y_{1\,s},\ y_{2\,s}, \ y_{3\,s}\) (we assume \(y_{1\,s}<y_{2\,s}<y_{3\,s}\)), out of which left and right equilibria are centers and the middle one is a saddle.
-
3.
\(D_1<0, \hspace{5.0pt}-{b_1}/a>0\). Equation (25) has one equilibrium on the v axis with the coordinate \(y_{1s}\), which is a saddle.
-
4.
\(D_1<0, \hspace{5.0pt}-{b_1}/a<0\). Equation (25) has one equilibrium on the v axis with the coordinate \(y_{1s}\), which is a center.
-
5.
\(D_1=0, \hspace{5.0pt}-{b_1}/a > 0\). Equation (25) has two equilibria \(y_{1s}\) and \(y_{2s}\) out of which one is a saddle and one is degenerate. On the curve \(D_1=0\) in the parameter space a pitchfork bifurcation occurs, where two equilibria of Eq. (25) either appear or vanish.
-
6.
\(D_1=0, \hspace{5.0pt}-{b_1}/a < 0\). Equation (25) has two equilibria \(y_{1s}\) and \(y_{2s}\) out of which one is a center and one is degenerate. On the curve \(D_1=0\) in the parameter space a pitchfork bifurcation occurs, where two equilibria of Eq. (25) either appear or vanish.
The phase portraits for the above cases are shown in Figs. 1-2. The pitchfork bifurcationw occur in the last two instances of the phase portraits.
Next, we write the equation studied for \(n=1\), \(C_1=0\), \(b_2=0\) and \(b_3=0\)

Phase portraits for the second case

Phase portraits for the second case
The right hand side of the system of Eq. (30) is not continuous at \(y=0\). To get the regular system associated to (30), we use the following variable transformation
Therefore, the regular system assosiated with (30) is written as follows
Systems of equations (30) and (32) have the same first integral
therefore their orbits are topologically the same, with the exception of the line \(y=0\). Thus, we can investigate the stability of equilibria of (32), which will match the stability of equilibria of (30). Every equilibrium of (32) is located on the v axis with the coordinate determined by the following equation
This equation can have at most four roots. Let us denote them as \(y_{1s}, \ y_{2s}, \ y_{3s}, \ y_{4s}\). Provided that the root is real, the stability of an equilibrium point \((y_{is},0)\) is determined by the eigenvalues of the matrix
Accordingly, if \(f_2(y)\) increases at the point \(y_s\) and \(y_s>0\), or decreases at the point \(y_s\) and \(y_s<0\), then an equilibrium is a saddle; if \(f_2(y)\) decreases at \(y_s\) and \(y_s>0\), or \(f_2(y)\) increases at \(y_s\) and \(y_s<0\), then it is a center, otherwise it is a degenerate equilibrium (this works for \(a>0\), in the case of \(a<0\) the situation is reversed). Thus, we present the following classification for equilibrium points in this case (in all the cases we assume that the discriminant of Eq. (34) is nonnegative \(D_2\ge 0\), except for the last one)
-
1.
\(b_1>0, \hspace{5.0pt}b_4>0, \hspace{5.0pt}\omega +C_0^2/4\ge 0\). Equation (32) has no equilibria (Fig. 3a).
-
2.
\(b_1>0, \hspace{5.0pt}b_4>0, \hspace{5.0pt}\omega +C_0^2/4 < 0\). Equation (32) has four equilibria in a sequence: (center, saddle, saddle, center) (Fig. 3b).
-
3.
\(b_1>0, \hspace{5.0pt}b_4<0\). Equation (32) has two center equilibria (Fig. 3c).
-
4.
\(b_1<0, \hspace{5.0pt}b_4>0\). Equation (32) has two saddle equilibria (Fig. 3d).
-
5.
\(b_1<0, \hspace{5.0pt}b_4<0, \hspace{5.0pt}\omega +C_0^2/4>0\). Equation (32) has four equilibria in a sequence: (saddle, center, center, saddle) (Fig. 3e).
-
6.
\(b_1<0, \hspace{5.0pt}b_4<0, \hspace{5.0pt}\omega +C_0^2/4<0\). Equation (32) has no equilibria (Fig. 3f).
-
7.
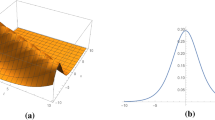
\(b_1\cdot (\omega +C_0^2/4)>0, \hspace{5.0pt}b_4=0\). Equation (32) has a degenerate zero equilibrium (Fig. 4a-b).
-
8.
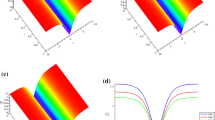
\(b_1>0, \hspace{5.0pt}\omega +C_0^2/4<0, \hspace{5.0pt}b_4=0\). Equation (32) has three equilibria in a sequence: (center, degenerate, center) (Fig. 4c).
-
9.
\(b_1<0, \hspace{5.0pt}\omega +C_0^2/4>0, \hspace{5.0pt}b_4=0\). Equation (32) has three equilibria in a sequnce: (saddle, degenerate, saddle) (Fig. 4d).
-
10.
\(b_1\cdot (\omega +C_0^2/4)<0, \hspace{5.0pt}D_2=0\). Equation (32) has two degenerate equilibria (Fig. 4e).
4 The first conservation law corresponding to Eq. (1)
Let us write Eq. (1) as the system of equations in the form
and
Multiplying Eq. (36) by \(q^{*}\) and Eq. (37) by \(-q\) and adding the resulting expressions, we obtain the equation
Equation (38) can be presented in the form
where \(T_1\) and \(X_1\) take the form
From Eq. (39) follows the conservative quantity
The conservative quantity (41) correspons to the impulse power.
5 The second conservation law corresponding to Eq. (1)
The second conservation law can be found by multiplying Eq. (36) by \(q_x^{*}\) and Eq. (37) by \(q_x\) and adding the resulting equations. We get
Taking into account the following formulas
we can write Eq. (42) in the form
The last equation can be presented as the conservation law
where \(T_2\) and \(X_2\) are determined by formulas
From Eq. (47) we obtain the conservative quantity in the form
Conservative quantity (50) corresponds to the conservation of the momentum of the solution q(x, t).
6 The third conservation law corresponding to Eq. (1)
At the first step we multiply Eq. (36) by \(|q|^{2n}\,q^{*}\) and Eq. (37) by \(-|q|^{2n}\,q\). After that we add the equations obtained. As a result we have the following equation
We also have the following equation after multiplying Eq. (36) by \(|q|^{n}\,q^{*}\) and Eq. (37) by \(-|q|^{n}\,q\) and then adding them. We get
The two following equations can be obtained by multiplying Eq. (36) by \(|q|^{-n}\,q^{*}\) and by \(|q|^{-2n}\,q^{*}\), consequently, and Eq. (37) by \(-|q|^{-n}\,q\), and bt \(-|q|^{-2n}\,q\). Adding these expressions yields two following equations
and
From Eqs. (51)–(54) one can see that we need other equations to find the third conservation law of Eq. (1). At the second step, first of all, we multiply Eq. (36) by \(q_{xx}^{*}\) and Eq. (37) by \(-q_{xx}\). Adding the expressions obtained, we have the equation
At the third step, we, first of all, multiply Eqs. (51), (52), (53) and (54) by \(b_1\), \(b_2\), \(b_3\) and \(b_4\), respectively. Then, Eq. (55) is multiplied by a. Adding five equations obtained yields the equation in the form
The last equation can be written as the conservation law
where \(T_3\) and \(X_3\) take the form
and
From (57) we obtain the conservative quantity in the form
Expression (60) corresponds to the conservation of energy for the optical soliton of Eq. (1).
7 Conservative quantities corresponding to the soliton (23) of Eq. (1)
Using the conservation laws we can calculate conservative quantities of solutions of Eq. (1). Without loss of generality, let us calculate the conservative quantities of optical soliton (23) corresponding to Eq. (1).
Let us note that to calculate the conservative quantity we use the following integral (Hammer 1953)
where B(x, y) is the beta function and F(a, b, c, z) is the Gaussian hypergeometric function, and \(2m>k\).
Substituting (23) into (41), we obtain the power of optical soliton (23) in the form
Using the new variable \(\xi =\frac{1}{\sqrt{\mu }}\,\ln (z)\), the integral (41) is reduced to the following
The conservative quantity corresponding to the momentum is found by substituting solution (23) into expression (50). As a result we have
Conservative quantity of solution (23) corresponding to Eq. (1) can be calculated by substituting solution (23) into (60) and taking into account integral (61) at \(b_3=0\) and \(b_4=0\). This yields the conservative quantity in the form
This conservative quantity (65) corresponds to the energy of the optical soliton (23).
8 Conclusion
In this paper we have studied the mathematical model for propagation pulses with four powers of nonlinearity. This nonlinear partial differential equation is the generalization of the nonlinear Schrödiner equation and some other well-known mathematical models for description of propagation pulses in optical medium, therefore it may help us evaluate the influence of various processes on pulse propagation. The main objective of this paper was to construct conservation laws of Eq. (1). There have been derived three conservation laws corresponding to Eq. (1) by means of direct calculations. To present analytical expressions of conserved quantites for the explored equation, analytical optical soliton solutions corresponding to the mathematical model have also been given. Conservative quantities for the bright optical soliton have been calculated. We suppose that the analytical expressions for conservative quantities obtained can be applied to verify whether numerical schemes for the studied equation are conservative.
Data availability
No data was used for the research described in the article.
References
Alotaibi, H.: Traveling wave solutions to the nonlinear evolution equation using expansion method and addendum to Kudryashov’s method. Symmetry 13(11), 2126 (2021). https://doi.org/10.3390/sym13112126
Alshehri, H.M., Biswas, A.: Conservation laws and optical soliton cooling with cubic-quintic-septic-nonic nonlinear refractive index. Phys. Lett. A 455, 128528 (2022). https://doi.org/10.1016/j.physleta.2022.128528
Alshehri, A.M., Alshehri, H.M., Alshreef, A.N., et al.: Conservation laws for dispersive optical solitons with Radhakrishnan-Kundu-Lakshmanan model having quadrupled power-law of self-phase modulation. Optik 267, 169715 (2022). https://doi.org/10.1016/j.ijleo.2022.169715
Alshehri, H.M., Alshehri, A.M., Alshreef, A.N., et al.: Conservation laws of optical solitons with quadrupled power-law of self-phase modulation. Optik 271, 170132 (2022). https://doi.org/10.1016/j.ijleo.2022.170132
Arnous, A.H., Biswas, A., Ekici, M., et al.: Optical solitons and conservation laws of Kudryashov’s equation with improved modified extended tanh-function. Optik 225, 165406 (2021). https://doi.org/10.1016/j.ijleo.2020.165406
Arnous, A.H., Biswas, A., Kara, A.H., et al.: Highly dispersive optical solitons and conservation laws in absence of self-phase modulation with new Kudryashov’s approach. Phys. Lett. A 431, 128001 (2022). https://doi.org/10.1016/j.physleta.2022.128001
Arshed, S., Arif, A.: Soliton solutions of higher-order nonlinear Schrödinger equation (NLSE) and nonlinear Kudryashov’s equation. Optik 209, 164588 (2020). https://doi.org/10.1016/j.ijleo.2020.164588
Arshed, S., Mirhosseini-Alizamini, M.S., Baleanu, D., et al.: Soliton solutions for non-linear Kudryashov’s equation via three integrating schemes. Therm. Sci. 25(2), 157–163 (2021)
Arshed, S., Raza, N., Butt, A.R., et al.: New soliton solutions of nonlinear Kudryashov’s equation via improved tan-expansion approach in optical fiber. Kuwait J. Sci. (2022). https://doi.org/10.48129/kjs.12441
Bayramukov, A.A., Kudryashov, N.A.: Numerical study of the model described by the fourth order generalized nonlinear Schrödinger equation with cubic-quintic-septic-nonic nonlinearity. J. Comput. Appl. Math. 437, 115497 (2024). https://doi.org/10.1016/j.cam.2023.115497
Biswas, A., Yıldırım, Y., Yaşar, E., et al.: Optical soliton perturbation with quadratic-cubic nonlinearity using a couple of strategic algorithms. Chin. J. Phys. 56(5), 1990–1998 (2018)
Biswas, A., Sonmezoglu, A., Ekici, M., et al.: Optical solitons with Kudryashov’s equation by f-expansion. Optik 199, 163338 (2019). https://doi.org/10.1016/j.ijleo.2019.163338
Biswas, A., Asma, M., Guggilla, P., et al.: Optical soliton perturbation with Kudryashov’s equation by semi-inverse variational principle. Phys. Lett. A 384(33), 126830 (2020). https://doi.org/10.1016/j.physleta.2020.126830
Biswas, A., Ekici, M., Sonmezoglu, A., et al.: Optical solitons with Kudryashov’s equation by extended trial function. Optik 202, 163290 (2020). https://doi.org/10.1016/j.ijleo.2019.163290
Biswas, A., Kara, A.H., Zhou, Q., et al.: Conservation laws for highly dispersive optical solitons in birefringent fibers. Regul. Chaot. Dyn. 25, 166–177 (2020)
Biswas, A., Sonmezoglu, A., Ekici, M., et al.: Cubic-quartic optical solitons with differential group delay for Kudryashov’s model by extended trial function. J. Commun. Technol. Electron. 65, 1384–1398 (2020)
Biswas, A., Vega-Guzmán, J., Ekici, M., et al.: Optical solitons and conservation laws of Kudryashov’s equation using undetermined coefficients. Optik 202, 163417 (2020). https://doi.org/10.1016/j.ijleo.2019.163417
Biswas, A., Kara, A.H., Sun, Y., et al.: Conservation laws for pure-cubic optical solitons with complex Ginzburg-Landau equation having several refractive index structures. Results Phys. 31, 104901 (2021). https://doi.org/10.1016/j.rinp.2021.104901
Biswas, A., Sonmezoglu, A., Ekici, M., et al.: Cubic-quartic optical solitons and conservation laws with Kudryashov’s law of refractive index by extended trial function. Comput. Math. Math. Phys. 61(12), 1995–2003 (2021)
Biswas, A., Sonmezoglu, A., Ekici, M., et al.: Cubic-quartic optical solitons and conservation laws with Kudryashov’s law of refractive index by extended trial function. Comput. Math. Math. Phys. 61(12), 1995–2003 (2021)
Biswas, A., Ekici, M., Sonmezoglu, A.: Stationary optical solitons with Kudryashov’s quintuple power-law of refractive index having nonlinear chromatic dispersion. Phys. Lett. A 426, 127885 (2022). https://doi.org/10.1016/j.physleta.2021.127885
Ege, S.M.: Solitary wave solutions for some fractional evolution equations via new Kudryashov approach. Rev. Mex. Fís. (2022). https://doi.org/10.31349/revmexfis.68.010703
Ekici, M.: Stationary optical solitons with complex Ginzburg-Landau equation having nonlinear chromatic dispersion and kudryashov’s refractive index structures. Phys. Lett. A 440, 128146 (2022). https://doi.org/10.1016/j.physleta.2022.128146
Eldidamony, H.A., Ahmed, H.M., Zaghrout, A.S., et al.: Cubic-quartic solitons in twin-core couplers with optical metamaterials having Kudryashov’s sextic power law of arbitrary refractive index by using improved modified extended tanh-function method. Optik 265, 169498 (2022). https://doi.org/10.1016/j.ijleo.2022.169498
Eldidamony, H.A., Ahmed, H.M., Zaghrout, A.S., et al.: Optical solitons with Kudryashov’s quintuple power law nonlinearity having nonlinear chromatic dispersion using modified extended direct algebraic method. Optik 262, 169235 (2022). https://doi.org/10.1016/j.ijleo.2022.169235
González-Gaxiola, O.: Optical soliton solutions for Triki-Biswas equation by Kudryashov’s r function method. Optik 249, 168230 (2022). https://doi.org/10.1016/j.ijleo.2021.168230
Hammer, C.: Higher Transcendental Functions, Volume I. McGraw-Hill Book Co. Inc, New York (1953)
Hasegawa, A., Tappert, F.: Transmission of stationary nonlinear optical pulses in dispersive dielectric fibers. I. Anomalous dispersion. Appl. Phys. Lett. 23(3), 142–144 (1973)
Hasegawa, A., Tappert, F.: Transmission of stationary nonlinear optical pulses in dispersive dielectric fibers. II. Normal dispersion. Appl. Phys. Lett. 23(4), 171–172 (1973)
Hu, X., Yin, Z.: A study of the pulse propagation with a generalized Kudryashov equation. Chaos Solitons Fractals 161, 112379 (2022). https://doi.org/10.1016/j.chaos.2022.112379
Kai, Y., Li, Y.: A study of Kudryashov equation and its chaotic behaviors. Waves Random Complex Media 45, 1–17 (2023). https://doi.org/10.1080/17455030.2023.2172231
Kivshar, Y.S., Agrawal, G.P.: Optical Solitons: From Fibers to Photonic Crystals. Academic Press, Cambridge (2003)
Kivshar, Y.S., Malomed, B.A.: Dynamics of solitons in nearly integrable systems. Rev. Modern Phys. 61(4), 763–915 (1989)
Kivshar, Y.S., Pelinovsky, D.E.: Self-focusing and transverse instabilities of solitary waves. Phys. Rep. 331(4), 117–195 (2000)
Kudryashov, N.A.: Exact solutions of the generalized Kuramoto-Sivashinsky equation. Phys. Lett. A 147(5–6), 287–291 (1990)
Kudryashov, N.: On types of nonlinear nonintegrable equations with exact solutions. Phys. Lett. A 155(4–5), 269–275 (1991)
Kudryashov, N.A.: Simplest equation method to look for exact solutions of nonlinear differential equations. Chaos Solitons Fractals 24(5), 1217–1231 (2005)
Kudryashov, N.A.: Seven common errors in finding exact solutions of nonlinear differential equations. Commun. Nonlinear Sci. Numer. Simul. 14(9–10), 3507–3529 (2009)
Kudryashov, N.A.: One method for finding exact solutions of nonlinear differential equations. Commun. Nonlinear Sci. Numer. Simul. 17(6), 2248–2253 (2012)
Kudryashov, N.A.: A generalized model for description of propagation pulses in optical fiber. Optik 189, 42–52 (2019)
Kudryashov, N.A.: First integrals and general solution of the complex Ginzburg-Landau equation. Appl. Math. Comput. 386, 125407 (2020). https://doi.org/10.1016/j.amc.2020.125407
Kudryashov, N.A.: Highly dispersive optical solitons of an equation with arbitrary refractive index. Regul. Chaot. Dyn. 25, 537–543 (2020)
Kudryashov, N.A.: Highly dispersive solitary wave solutions of perturbed nonlinear Schrödinger equations. Appl. Math. Comput. 371, 124972 (2020). https://doi.org/10.1016/j.amc.2019.124972
Kudryashov, N.A.: Mathematical model of propagation pulse in optical fiber with power nonlinearities. Optik 212, 164750 (2020). https://doi.org/10.1016/j.ijleo.2020.164750
Kudryashov, N.A.: Method for finding highly dispersive optical solitons of nonlinear differential equations. Optik 206, 163550 (2020). https://doi.org/10.1016/j.ijleo.2019.163550
Kudryashov, N.A.: Optical solitons of mathematical model with arbitrary refractive index. Optik 224, 165391 (2020). https://doi.org/10.1016/j.ijleo.2020.165391
Kudryashov, N.A.: Almost general solution of the reduced higher-order nonlinear Schrödinger equation. Optik 230, 166347 (2021). https://doi.org/10.1016/j.ijleo.2021.166347
Kudryashov, N.A.: The generalized duffing oscillator. Commun. Nonlinear Sci. Numer. Simul. 93, 105526 (2021). https://doi.org/10.1016/j.cnsns.2020.105526
Kudryashov, N.A.: Implicit solitary waves for one of the generalized nonlinear Schrödinger equations. Mathematics 9(23), 3024 (2021). https://doi.org/10.3390/math9233024
Kudryashov, N.A.: Model of propagation pulses in an optical fiber with a new law of refractive indices. Optik 248, 168160 (2021). https://doi.org/10.1016/j.ijleo.2021.168160
Kudryashov, N.A.: Solitary waves of the non-local Schrödinger equation with arbitrary refractive index. Optik 231, 166443 (2021). https://doi.org/10.1016/j.ijleo.2021.166443
Kudryashov, N.A.: Method for finding optical solitons of generalized nonlinear Schrödinger equations. Optik 261, 169163 (2022). https://doi.org/10.1016/j.ijleo.2022.169163
Kudryashov, N.A.: Optical solitons of the generalized nonlinear Schrödinger equation with Kerr nonlinearity and dispersion of unrestricted order. Mathematics 10(18), 3409 (2022). https://doi.org/10.3390/math10183409
Kudryashov, N.A.: Stationary solitons of the generalized nonlinear Schrödinger equation with nonlinear dispersion and arbitrary refractive index. Appl. Math. Lett. 128, 107888 (2022). https://doi.org/10.1016/j.aml.2021.107888
Kudryashov, N.A., Antonova, E.V.: Solitary waves of equation for propagation pulse with power nonlinearities. Optik 217, 164881 (2020). https://doi.org/10.1016/j.ijleo.2020.164881
Kudryashov, N.A., Biswas, A., Kara, A.H., et al.: Cubic-quartic optical solitons and conservation laws having cubic-quintic-septic-nonic self-phase modulation. Optik 269, 169834 (2022). https://doi.org/10.1016/j.ijleo.2022.169834
Kumar, S., Malik, S., Biswas, A., et al.: Optical solitons with Kudryashov’s equation by lie symmetry analysis. Phys. Wave Phenom. 28, 299–304 (2020)
Li, C., Wang, C.: Propagation pulses in optical fiber modeled by the Kudryashov equation. J. Phys. Conf. Ser. 2381, 012035 (2022). https://doi.org/10.1088/1742-6596/2381/1/012035
Olver, P.J.: Applications of Lie Groups to Differential Equations, vol. 107. Springer, Cham (1993)
Ozisik, M., Cinar, M., Secer, A., et al.: Optical solitons with Kudryashov’s sextic power-law nonlinearity. Optik 261, 169202 (2022). https://doi.org/10.1016/j.ijleo.2022.169202
Raheel, M., Inc, M., Tala-Tebue, E., et al.: Optical solitons of the Kudryashov equation via an analytical technique. Opt. Quantum Electron. 54(6), 340 (2022). https://doi.org/10.1007/s11082-022-03728-2
Raheel, M., Inc, M., Tala-Tebue, E., et al.: Optical solitons of the Kudryashov equation via an analytical technique. Opt. Quantum Electron. 54(6), 340 (2022). https://doi.org/10.1007/s11082-022-03728-2
Raheel, M., Zafar, A., Nawaz, M.S., et al.: Exact soliton solutions to the time-fractional Kudryashov model via an efficient analytical approach. Pramana 97(1), 45 (2023). https://doi.org/10.1007/s12043-023-02514-3
Raza, N., Seadawy, A.R., Kaplan, M., et al.: Symbolic computation and sensitivity analysis of nonlinear Kudryashov’s dynamical equation with applications. Phys. Scr. 96(10), 105216 (2021). https://doi.org/10.1088/1402-4896/ac0f93
Serkin, V., Belyaeva, T.: Do n-soliton breathers exist for the Hirota equation models? Optik 173, 44–52 (2018)
Sonmezoglu, A., Ekici, M., Biswas, A.: Optical solitons for Kudryashov’s model: undetermined coefficients with Jacobi’s elliptic functions. Optoelectron. Adv. Mater. Rapid Commun. 16(5–6), 243–247 (2022)
Tai, K., Hasegawa, A., Tomita, A.: Observation of modulational instability in optical fibers. Phys. Rev. Lett. 56(2), 135–138 (1986)
Triki, H., Sun, Y., Zhou, Q., et al.: Dark solitary pulses and moving fronts in an optical medium with the higher-order dispersive and nonlinear effects. Chaos Solitons Fractals 164, 112622 (2022). https://doi.org/10.1016/j.chaos.2022.112622
Triki, H., Zhou, Q., Liu, W., et al.: Chirped optical soliton propagation in birefringent fibers modeled by coupled Fokas-Lenells system. Chaos Solitons Fractals 155, 111751 (2022). https://doi.org/10.1016/j.chaos.2021.111751
Vega-Guzman, J., Biswas, A., Kara, A.H., et al.: Cubic-quartic optical soliton perturbation and conservation laws with Lakshmanan-Porsezian-Daniel model: undetermined coefficients. J. Nonlinear Opt. Phys. Mater. 30(03–04), 2150007 (2021). https://doi.org/10.1142/S0218863521500077
Vitanov, N.K.: Application of simplest equations of Bernoulli and Riccati kind for obtaining exact traveling-wave solutions for a class of PDES with polynomial nonlinearity. Commun. Nonlinear Sci. Numer. Simul. 15(8), 2050–2060 (2010)
Vitanov, N.K.: Modified method of simplest equation: powerful tool for obtaining exact and approximate traveling-wave solutions of nonlinear pdes. Commun. Nonlinear Sci. Numer. Simul. 16(3), 1176–1185 (2011)
Vitanov, N.K.: On modified method of simplest equation for obtaining exact and approximate solutions of nonlinear PDES: the role of the simplest equation. Commun. Nonlinear Sci. Numer. Simul. 16(11), 4215–4231 (2011)
Vitanov, N.K., Dimitrova, Z.I.: Application of the method of simplest equation for obtaining exact traveling-wave solutions for two classes of model pdes from ecology and population dynamics. Commun. Nonlinear Sci. Numer. Simul. 15(10), 2836–2845 (2010)
Vitanov, N.K., Dimitrova, Z.I., Kantz, H.: Modified method of simplest equation and its application to nonlinear PDES. Appl. Math. Comput. 216(9), 2587–2595 (2010)
Wang, M.Y.: Highly dispersive optical solitons of perturbed nonlinear Schrödinger equation with Kudryashov’s sextic-power law nonlinear. Optik 267, 169631 (2022). https://doi.org/10.1016/j.ijleo.2022.169631
Wang, M.Y.: Highly dispersive optical solitons of perturbed nonlinear Schrödinger equation with Kudryashov’s sextic-power law nonlinear. Optik 267, 169631 (2022). https://doi.org/10.1016/j.ijleo.2022.169631
Yildirim, Y.: Bright, dark and singular optical solitons to Kundu-Eckhaus equation having four-wave mixing in the context of birefringent fibers by using of modified simple equation methodology. Optik 182, 110–118 (2019)
Yildirim, Y.: Optical solitons of Biswas-Arshed equation by modified simple equation technique. Optik 182, 986–994 (2019)
Yıldırım, Y.: Optical solitons with Biswas-Arshed equation by F-expansion method. Optik 227, 165788 (2021). https://doi.org/10.1016/j.ijleo.2020.165788
Yıldırım, Y., Yaşar, E.: Multiple exp-function method for soliton solutions of nonlinear evolution equations. Chin. Phys. B 26(7), 070201 (2017). https://doi.org/10.1088/1674-1056/26/7/070201
Yıldırım, Y., Biswas, A., Ekici, M., et al.: Optical solitons with Kudryashov’s model by a range of integration norms. Chin. J. Phys. 66, 660–672 (2020)
Yıldırım, Y., Biswas, A., Kara, A.H., et al.: Optical solitons and conservation law with Kudryashov’s form of arbitrary refractive index. J. Opt. 50(6), 1–6 (2021). https://doi.org/10.1007/s12596-021-00688-w
Zayed, E.M., Alngar, M.E.: Optical soliton solutions for the generalized Kudryashov equation of propagation pulse in optical fiber with power nonlinearities by three integration algorithms. Math. Methods Appl. Sci. 44(1), 315–324 (2021)
Zayed, E.M., Alngar, M.E., Biswas, A., et al.: Chirped and chirp-free optical solitons in fiber Bragg gratings with Kudryashov’s model in presence of dispersive reflectivity. J. Commun. Technol. Electron. 65, 1267–1287 (2020)
Zayed, E.M., Alngar, M.E., Biswas, A., et al.: Solitons and conservation laws in magneto-optic waveguides with triple-power law nonlinearity. J. Opt. 49, 584–590 (2020)
Zayed, E.M., Shohib, R.M., Biswas, A., et al.: Optical solitons with differential group delay for Kudryashov’s model by the auxiliary equation mapping method. Chin. J. Phys. 67, 631–645 (2020)
Zayed, E.M., Shohib, R.M., Biswas, A., et al.: Optical solitons and other solutions to Kudryashov’s equation with three innovative integration norms. Optik 211, 164431 (2020). https://doi.org/10.1016/j.ijleo.2020.164431
Zayed, E., Shohib, R., Alngar, M., et al.: Optical solitons and conservation laws associated with Kudryashov’s sextic power-law nonlinearity of refractive index. Ukr. J. Phys. Opt. 22(1), 38–49 (2021). https://doi.org/10.3116/16091833/22/1/38/2021
Zayed, E.M., Alngar, M.E., Biswas, A., et al.: Solitons and conservation laws in magneto-optic waveguides with generalized Kudryashov’s equation. Chin. J. Phys. 69, 186–205 (2021). https://doi.org/10.1088/1674-1056/26/7/070201
Zayed, E.M., Alngar, M.E., Biswas, A., et al.: Solitons and conservation laws in magneto-optic waveguides with generalized Kudryashov’s equation. Chin. J. Phys. 69, 186–205 (2021)
Zayed, E.M., Alngar, M.E., El-Horbaty, M.M., et al.: Cubic-quartic polarized optical solitons and conservation laws for perturbed Fokas-Lenells model. J. Nonlinear Opt. Phys. Mater. 30(03–04), 2150005 (2021). https://doi.org/10.1142/S0218863521500053
Zayed, E.M., Shohib, R.M., Alngar, M.E., et al.: Solitons and conservation laws in magneto-optic waveguides with generalized Kudryashov’s equation by the unified auxiliary equation approach. Optik 245, 167694 (2021). https://doi.org/10.1016/j.ijleo.2021.167694
Zayed, E.M., Shohib, R.M., Alngar, M.E., et al.: Solitons and conservation laws in magneto-optic waveguides with generalized Kudryashov’s equation by the unified auxiliary equation approach. Optik 245, 167694 (2021). https://doi.org/10.1016/j.ijleo.2021.167694
Zayed, E.M., Alngar, M.E., Shohib, R.M., et al.: Optical solitons having Kudryashov’s self-phase modulation with multiplicative white noise via itô calculus using new mapping approach. Optik 264, 169369 (2022). https://doi.org/10.1016/j.ijleo.2022.169369
Acknowledgements
This research was supported by Russian Science Foundation Grant No. 23-41-00070, https://rscf.ru/en/project/23-41-00070/.
Funding
Russian Science Support Foundation (23-41-00070).
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that credit have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Kudryashov, N., Lavrova, S. & Nifontov, D. Analytical solutions and conservation laws of the generalized model for propagation pulses with four powers of nonlinearity. Opt Quant Electron 56, 1110 (2024). https://doi.org/10.1007/s11082-024-06598-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-024-06598-y