
Abstract
Numerous variations of cognitive challenges, such as those in fluid mechanics, plasma physics and nonlinear optics as well as in engineering and mathematics, involve nonlinear partial differential equations. In this study, we explore the (3+1)-dimensional generalized Yu–Toda–Sasa–Fukuyama (YTSF) equation with application in engineering and physical science. Three (1+1)-dimensional nonlinear partial differential equations can be acquired from the YTSF equation. Using a N-fold Darboux transformation technique of Lax pair to obtain the multi-soliton, resonant and complex soliton solutions of the equation. Also, by showing the solutions graphically, the completeness of the outcome was confirmed. The conclusions in this study might be useful for understanding the soliton solutions in mathematics and physics.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Investigations on nonlinear partial differential equations (NLPDEs) are crucial and significant because these equations describe numerous different tendencies in a variety of scientific fields, including bioengineering, molecular biology, hydrodynamics, fluid mechanics, biogenetics, physiology, fiber optics and many more (Malik et al. 2023; Lin and Wen 2023; Abdulwahhab 2021; Shen et al. 2022; Perumalsamy et al. 2020). NLPDEs in a fluid mechanic describe the movement of neutrally buoyant plumes in a curving absorbent media, the authors of Adeyemo et al. (2022), Wen and Yan (2017, 2018) researched it. The solutions like solitons, breathers, rogue waves and semi-rational solutions on periodic backgrounds for the coupled Lakshmanan–Porsezian–Daniel equations was investigated by Li and Guo (2023). The generalized Korteweg–de Vries–Zakharov–Kuznetsov equation was also researched in Khalique and Adeyemo (2020). In particular, the authors in Gao et al. (2021) investigated a (3+1)-dimensional generalized varying Kadomtsev–Petviashvili (KP)-Burgers-type equation for several forms of interstellar dust plasma screens that was supported by observational and experimental data. One of the galactic or laboratory dust plasmas could be described by this equation as having an acceptor, subatomic or dust-ion-acoustic wave. Further examples are available for the reader in Raza et al. (2023), Zahran et al. (2023). In addition to the aforementioned, there has been a significant increase in mathematicians and physicists discovering efficient methods to find an exact solution to NLPDEs in recent times. Many of these methods include, the theory of the Lie groups (Yao et al. 2023), the generalized Riccati equation expansion method (Cakicioglu et al. 2023), the complicated hyperbolic function technique (Leonenko and Phillips 2023), the kather method (Ali et al. 2023), the \(\tan -\cot\) technique (Muatjetjejaa et al. 2023), the non-classical strategy (Raza et al. 2023), the variational transform (Golovnev 2023), the transformations (Singh and Ray 2023), the F-expansion technique (Rezazadeh et al. 2023), the extended simplest approach (Rehman et al. 2022), the Hirota bilinear technique (Ma and Fan 2011), the bifurcation technique (Ding et al. 2023), the \(\frac{G'}{G^2}\)-expansion technique (Walls and Stein 1973), the Darboux transformation (DT) (Li et al. 2020), the sine-Gordon equation expansion method approach (Kheaomaingam et al. 2023), the Kudryashov technique (Barman et al. 2021), the exp-function technique (Shakeel et al. 2023) and so on (Ahmad 2023, 2022).
It has been demonstrated in recent publications (Gilson et al. 1996) that multidimensional NLPDEs can be divided into a few (1+1)-dimensional NLPDEs. As a result, the latter can be used to deduce accurate solutions. Of the numerous methods, the DT is well recognized for being successful at identifying soliton solutions for NLPDEs. Geng has provided a new method for breaking down a YTSF equation into three (1+1)-dimensional Ablowitz–Kaup–Newell–Segur (AKNS) spectral equations.
It is observed that the YTSF equation is frequently employed to study the dynamics of solitons together with nonlinear waves that occur in fluid mechanics, hydrodynamics and weakly scattering media. Consider the YTSF equation (Dong et al. 2019)
this is a counterpart of the (3+1)-dimensional NLPDEs of the dynamic type defined as
which contains the integro-differential component in Eq. (2) was primarily proposed by Ma et al. (2009) by the use of strong symmetry when creating the three-dimensional extension from the (2+1)-dimensional Calogero–Bogoyavlenkii–Schiff equation (Wazwaz 2017)
similar to the manner in which the KdV equation was used to derive the KP equation. System of Eq. (2) converts to the YTSF Eq. (1), which is an auxiliary of the Bogoyavlenskii–Schiff equation by taking \(u=v_{x}\). Furthermore, we see that Eq. (1) becomes the KP equation if \(z=x\) is assumed and it also reduces to the KdV equation if \(v_{y}=0\) is assumed. It is worth noting that the YTSF equation Eq. (1) is a hugely important higher dimensional nonlinear evolution equation (NLEE) capable of describing several dynamic processes as well as key phenomena encountered in both physics and engineering. The authors of Verma and Kaur (2021) used the exp-\((\psi (z))\)-expansion approach in conjunction with a sophisticated method to obtain some approximations to the Eq. (1). Furthermore, they were able to derive five different sorts of solutions, including exponentially, hyperbolic, rational, elliptical function and trigonometric solutions. Feng introduced a Bernoulli sub-ODE approach in Yang et al. (2015) to get certain accurate wave solutions of Eq. (1). The authors of Kristiansen (2004) used the \(\frac{G'}{G}\)-expansion approach to obtain several generalized solitary solutions of various physical structures for the YTSF Eq. (1). Adeyemo et al. (2023) used the transformations of undefined functions to change Eq. (1) into an integrated equation with two unique bilinear forms. Furthermore, the authors used Darvishi’s strategy to get certain modern multi-solutions by the use of homoclinic test technique and three wave techniques. Additionally, the non-traveling wave solution was realized by way of auto-B\(\ddot{a}\)cklund transformation, as well as the extended projective Riccati equation approaches (Li and Chen 2003). Additionally, several periodic solutions, as well as soliton solutions for the YTSF equation, were obtained using the Hirota bilinear, exp-function, homoclinic, \(\tanh -\coth\) and extended homoclinic tests. Recently, Darvishi employed the modified of the homoclinic testing method to secure certain closed-form solutions to the YTSF in Eq. (1) (Naidoo et al. 2023). In a similar spirit, Zayed and Arnous used the improved simple equation technique to obtain specific closed-form approximations to the YTSF equation (Wazwaz 2022). Also, by using the multiple \((\frac{G'}{G},\frac{1}{G})\)-expansion technique, Zayed and Hoda Ibrahim both succeeded in finding some analytical traveling wave solutions to the YTSF equation (Feng 2012). By using the \(\tanh\) approach, new closed-form solutions to the problem were derived after engaging in symmetry reduction of Eq. (1) (Gonze et al. 2020). Zayed and Arnous (2012) recently introduced
the equation is also known as the (2+1)-dimensional YTSF equation. Using symbolic computation and the Hirota bilinear approach, the authors got several closed-form solutions to Eq. (4) and some lump solutions.
In our study, we used a generalized YTSF equation
where parameters \(\epsilon ,~\delta ~and~\alpha\) are considered real constants with nonzero values. If \(\epsilon =2,~\delta =3~and~\alpha =1\), the YTSF Eq. (5) may be connected to the totally generalized YTSF Eq. (1). In this study, an explicit N-fold DT (Wen et al. 2015; Guo and Xie 2023) of the AKNS spectral equations is developed and the DT and decomposition are used to provide the multi-soliton, resonant and complex soliton solution to the YTSF equation. As an example, we get the solutions to a variety of solutions interactions. In contrast to the other approaches, DT is completely algebraic and offers a logical process for creating soliton solutions for nonlinear equations. By using DT to iteratively combine the solutions to the associated spectrum problem and nonlinear equation, one is able to generate solutions like resonant, complex, and multi-soliton solutions.
The article’s layout is set up as follows: Sect. 2 presents the decomposition of the YTSF equation to the three (1+1)-dimensional ANKS equation. Section 3 implements the DT technique. Sect. 4 represents the multi-soliton, along with the subsections of resonant and complex soliton solutions to the YTSF equation. Results and discussions are presented in Sect. 5 and concluding observations are made in Sect. 6.
2 The decomposition of a (3+1)-dimensional nonlinear YTSF equation to the (1+1)-dimensional AKNS equations
Assume that the AKNS spectral equation
and the adjunct problem
where
where \(c_{i},~d_{i}~and ~e_{i} ~(i = 0, 1,\ldots , r-1)\) being function of x and \(t_{r}\), \(\gamma\) is a constant spectral component and \(\beta\) is a constant. The zero distortion equation \(W_{{t}_{r}}-L^{(r)}_{x}+[W,~L^{(r)}]=0\), which is equal to the AKNS hierarchical, is the compatibility prerequisite of Eqs. (6) and (7).
where
and
The three major AKNS hierarchical members are provided by Eq. (8).
The AKNS equation is given for \(r = 2,~ t_{2} = y~and~\beta =-2\) is
and the associated adjunct problem,
We obtain the AKNS equation for \(r = 3,~ t_{3} = t~ and~\beta = 4\) is,
and the associated adjunct problem,
We obtain the AKNS equation for \(r = 4,~ t_{4} = z~ and~\beta = -8\) is,
and the associated adjunct problem,
where
Considering the constraint, Geng recently published a novel decomposition of the (3+1)-dimensional NEE of Eq. (1)
It is noteworthy that the reduction is perfectly connected to the (1+1)-dimensional AKNS Eqs. (12), (14) and (16).
Proposition (i)
Considering that the (1+1)-dimensional AKNS Eqs. (12), (14) and (16) have a corresponding solution of (n, m). Then, the (3+1)-dimensional NEE of Eq. (1) is solved by the function of (18).
By creating an exact N-fold DT of the Eqs. (12), (14) and (16). The interoperable solutions (n, m) of Eqs. (12), (14) and (16) as well as the constraint provide the multi-soliton, resonant and complex soliton solution to the (3+1)-dimensional NEE.
3 Darboux transformation
The DT of the spectral Eq. (6) and (7) (with Eqs. (12), (14) and (16)) will be discussed. In actuality, the DT is a gauge transformation.
of the Eqs. (13), (15) and (17) from the spectrum Eqs. (6) and (7). It is necessary that \({\overline{\varphi }}\) also meets the same criteria as spectral difficulties.
The previous potentials n and m in \(W,~ L ^{(2)},~ L ^{(3)} and L^{(4)}\) must be replaced with the new potentials \({\overline{n}}~ and~ {\overline{m}}\), which implies we must discover a matrix \({\textbf{U}}\) that accomplishes this goal.
Now assume that
where
with \(G(\gamma ),~Q(\gamma ),~R(\gamma )~and~H(\gamma ) ~(0\le j\le M-1)\) are functions of x, y, z and t.
\(\varphi (\gamma _{i})=(\varphi _{1}(\gamma _{i}),\varphi _{2}(\gamma _{i}))^{{\textbf{U}}}\) and \(\varPsi (\gamma _{i})=(\varPsi _{1}(\gamma _{i}),\varPsi _{2}(\gamma _{i}))^{{\textbf{U}}}\) are two fundamental solution to Eqs. (6) and (7), including Eqs. (13), (15) and (17). Constants \(p_{i}~ (1 \le i \le 2M)\), which fulfill Eq. (19), exist.
The Eqs. (27) and (28) can also be expressed as a linear algebraic problems.
or
with
The consideration of the constants \(\gamma _{i}~(\gamma _{j}\ne \gamma _{i}~as~j\ne i)\) and \(p_{i}\) ensures that the determinant of the coefficients in Eq. (30) is non-zero. As a result, determines \(G_{j},~Q_{j},~R_{j}~and~H_{j}~(0 \le j\le M-1)\) exclusively in Eq. (30). The Eqs. (25) and (26) illustrate that \(\det ({\textbf{U}}(\gamma ))\) is a second order polynomial in \(\gamma\),
from Eq. (29), we obtain
As a result, it asserts that
This suggest that \(\gamma _{i}~ (1 \le ~i \le ~ 2M)\) are 2M root of \(\det {\textbf{U}}(\gamma )\), which is
Proposition (ii)
The matrix \({\overline{W}}\) obtained from Eq. (20) possesses the same structure as W, which is
where the transformation between n, m and \({\overline{n}}\), \({\overline{m}}\) is obtained by
and
that is \(1~\le ~f\le ~ M,~G_{-1}=~Q_{-1}=~R_{-1}=~H_{-1}=~0.\)
Proof
Suppose \({\textbf{U}}^{-1}={\textbf{U}}^{*}/\det {\textbf{U}}\) and
It is unambiguous that \(g_{11}(\gamma )\) and \(g_{22}(\gamma )\) are polynomials of \((2M + 1)th\) order in \(\gamma\), whereas \(g_{12}(\gamma )\) and \(g_{21}(\gamma )\) are polynomials of 2Nth order in \(\gamma\). We explore Eqs. (6) and (31).
All \(\gamma _{i}~(0 ~\le ~i ~2M)\) are roots of \(g_{cd}(\gamma )~(c,d=1,2)\), according to Eqs. (33) and (42). Explored with Eqs. (35) and (41), yield us
where
\(b_{ed}^{k}~ (e,~ d = 1, 2, ~k = 0, 1)\) are unrelated by the variable \(\gamma\). Equation (43) may now be expressed as
observations are made by contrasting the coefficients of \(\gamma ^{M+1}\) and \(\gamma ^{M}\) in Eq. (45) and observing Eq. (36).
Hence, we proved that \(B(\gamma )={\overline{W}}\), with the help of Eqs. (20) and (45). \(\square\)
Proposition (iii)
The only difference between the matrix \({\overline{L}}^{(2)}\) and the matrix \(L^{(2)}\) described by Eq. (21) is the substitution of \({\overline{n}}\) and \({\overline{m}}\) for n and m. The identical DT in Eq. (19) are used to transfer the existing potentials (n, m) into new ones Eq. (36).
Proof
We write \({\textbf{U}}^{-1}={\textbf{U}}^{*}/\det {\textbf{U}}\), in a similar manner to proposition (ii) and
It is noteworthy that \(q_{11}^{(2)}\) and \(q_{22}^{(2)}\) are polynomial of \((2M + 2)th\) order in \(\gamma\), whereas \(q_{12}^{(2)}\) and \(q_{21}^{(2)}\) are polynomial of \((2M + 1)th\) order in \(\gamma\). Using Eqs. (7), (13), (31) and (33), we derive that
By using Eqs. (33) and (49–51), we can demonstrate that all \(\gamma _{i}~ (1 ~\le ~ i~ 2M)\) are roots of \(q_{cd}^{(2)}(\gamma ) (c,d = ~1, ~2).\) Eqs. (35) and (48), together with
where
\(a_{ed}^{(k)}~(e,d=~0,~1,~k=0,~1,~2)\) are not dependent on \(\gamma\). Equation (52) is now represented as
using Eqs. (36–40) and contrasting the coefficients of \(\gamma ^{M+2},~ \gamma ^{M+1}\) and \(\gamma ^{M}\) in Eq. (54), we obtain
Hence, we proved that \(A(\gamma )={\overline{L}}^{(2)}\), with the help of Eqs. (21) and (54). \(\square\)
Proposition (iv)
The difference between \(L^{(3)]}\) and the matrix \({\overline{L}}^{(3)}\) described in Eq. (22) is the substitution of \({\overline{n}}\) and \({\overline{m}}\) for n and m. The similar DT are used to transfer the existing potentials n, m into new ones of Eqs. (19) and (36).
Proof
From Eq. (19)
where
\(c_{ed}^{(k)}~(e,d=~0,~1,~k=0,~1,~2,~3)\) are not dependent on \(\gamma\). According to Eqs. (7), (15), (31) and (33), we obtain
using Eqs. (36–40) and contrasting the coefficients of \(\gamma ^{M+3},~\gamma ^{M+2},~\gamma ^{N+1}\) and \(\gamma ^{M}\) in Eq. (60), we have
Hence, we proved that \(C(\gamma )={\overline{L}}^{(3)}\), with the help of Eqs. (22) and (60). \(\square\)
Proposition (v)
The only difference between the matrix \({\overline{L}}^{(4)}\) and the matrix \(L^{(4)}\) described by Eq. (23) is the substitution of \({\overline{n}}\) and \({\overline{m}}\) for n and m. The identical DT of Eqs. (19) and (36) are used to transfer the existing potentials n, m into new ones.
Proof
From Eq. (19)
where
\(s_{ed}^{(k)}~(e,d=~0,~1,~k=0,~1,~2,~3,~4)\) are not dependent on \(\gamma\). According to Eqs. (7), (17), (31) and (33), we obtain
using Eqs. (36–40) and contrasting the coefficients of \(\gamma ^{M+4},~\gamma ^{M+3},~\gamma ^{M+2},~\gamma ^{N+1}\) and \(\gamma ^{M}\) in Eq. (73), we have
Hence, we proved that \(S(\gamma )={\overline{L}}^{(4)}\), with the help of Eqs. (23) and (74).
The modifications of Eqs. (19) and (36), turn the lax pair of Eqs. (6), (13), (15) and (17) into additional lax pair of the Eqs. (20–23), as shown by propositions \((ii)-(v)\). It follows that both Lax pair of Eqs. (6), (13) and Eqs. (20), (21) lead to the same AKNS equation of Eq. (12), both Lax pairs of Eqs. (6), (15) and Eqs. (20, 22) lead to the same AKNS Eq. (14) and both Lax pairs of Eqs. (6), (17) and Eqs. (20), (23), lead to the same AKNS Eq. (16). The DT of the AKNS Eqs. (12), (14) and (36), are the transformation of Eqs. (19) and (36). \(\square\)
4 Soliton solutions
In accordance with the proposition (i)–(v), we will create the fundamental solution of Eqs. (6) and (7) (such as Eqs. (13), (15) and (17) and the DT of Eqs. (19) and (36) for the (1 + 1)-dimensional AKNS equations of Eqs. (12), (14) and (16). Start by substituting \(n=m=0\) into the spectral Eqs. (6) and (7) (such as Eqs. (13), (15) and (17)). Then select one of the two simple solutions,
that is \(\zeta _{i}=\gamma _{i}x-2\gamma ^{2}_{i}y-8\gamma _{i}^{4}z+4\gamma _{i}^{3}t~~(1\le ~i\le ~2\,M).\) Eq. (31) implies that,
Proposition (vi)
We may derive a novel solution for the (3+1)-dimensional NEE of Eq. (1) using DT of Eqs. (19) and (36) and constraints of Eq. (18),
where
Now, we discuss following cases for different values for M.
Case (i). \((M=1)\)
Suppose that \(\gamma _{i},~p_{i}~(i=1,~2),\) solve the algebraic Eq. (30),
A one-soliton solution of Eq. (1) is derived by inserting Eq. (92) into Eq. (91),
that is \(\theta _{1}=\zeta _{1}-\zeta _{2}.\)
Case (ii). \((M=2)\)
Suppose that \(\gamma _{i},~p_{i}~(i=1,~2,~3,~4),\) solve the algebraic Eq. (30),
where
A two-soliton solution of Eq. (1) is derived by using Eq. (91),
Case (iii). \((M=3)\)
Suppose that \(\gamma _{i},~p_{i}~(i=1,~2,~3,~4,~5,~6),\) solve the algebraic Eq. (30),
where
A three-soliton solution of Eq. (1) is derived by using Eq. (91),
and a four-soliton solution of Eq. (1) is derived by using Eq. (91), when substitute \(M=4\),we get
4.1 Resonant solution
In order to solve the spectrum Eqs. (6) and (7) (such as Eqs. (13), (15) and (17)), we first start with the simple solutions \(v(x, y, t, z) = v\) (a non-zero constant), \(u(x, y, t, z) = 0\), then select one of the two simple solutions.
that is \(\theta _{i}=\gamma _{i}x-2\gamma _{i}^{2}y+4\gamma _{i}^{3}t-8\gamma _{i}^{4}z~~~(1\le ~i~\le ~2M).\) From Eq. (31), we derive
We can provide a resonant solution of Eq. (1), when Eqs. (99) is used in place of Eq. (90). A resonant solutions of Eq. (1) is
4.2 Complex solitons
The complex solution for the Eq. (1) will be created using Eq. (91). We will cover the exceptional dynamic to keep problems simple of Eq. (95). Suppose we set \(n = m = 0\),
now, from spectral Eqs. (6) and (7), are
where
and \(\beta _{1}\) and \(\alpha _{1}\) are constants, from Eq. (31)
Inserting Eq. (102) and Eqs. (107–110), to Eq. (95), we get
and
where
5 Results and discussion
This section thoroughly contrasts the evaluated results with the previously computed outcomes to demonstrate the uniqueness of the present investigation. It can be illustrated that (Adeyemo and Khalique 2022) calculated a relatively small number of solutions by employing Lei symmetry analysis. However, by utilizing the Darboux transformation, we have acquired a large number of solutions in this article. We obtain the multi-soliton, resonant and complex soliton solution to the YTSF Eq. (5) in the preceding sections using the DT. The AKNS hierarchy simplifies all solutions for solving a linear algebraic system, which is appropriate for generating solutions. Multi-solitons are a type of soliton solution that can be found in nonlinear wave equations. These solitons are characterized by the presence of several waves that move at various speeds and engage in nonlinear interactions. The YTSF equation is one such nonlinear wave equation that accepts multiple solitons. The DT approach has lately been employed by researchers to look into the dynamics of multi-solitons. By leveraging existing solutions, the DT method is a mathematical technique that enables the construction of new solutions for NLPDEs. This approach has allowed researchers to examine the behavior of multi-solitons. With the use of DT, we explore unique multi-soliton, resonant, and complicated solutions in this study. Complex interactions between these solitons can result in phenomena. The analysis of multi-solitons and the YTSF equation using DT has, all in all, yielded important insights into the dynamics of nonlinear wave equations. These discoveries are crucial for industries like optics, where soliton solutions are essential for the movement of light through optical fibers.
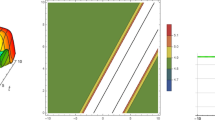
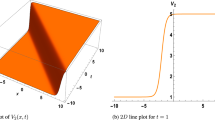
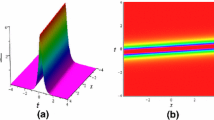
The wavelength and frequency of a wave are determined by its period, which is the duration of time it takes for a cycle to complete, and its soliton solution, which is a wave with a repeating continuous pattern. Here, we plotted a number of wave profiles that were taken from the solutions to Eq. (5) and Solutions in the YTSF equation can be represented graphically in a 3-dimensional plot along with the projection of a contour plot and a 2-dimensional plot. A single, localized wave-like structure is represented by a one-soliton solution. Two solitons, which are frequently depicted as peaks or waves, are combined to form a two-soliton solution. Three solitons can travel at once in a three-soliton solution. Through particular restrictions or mechanisms, such as velocity resonance, resonant soliton solutions are attained. Solitons with additional characteristics, such as fluctuating amplitudes or phases, are referred to as complex soliton solutions. The one-soliton solution of Eq. (93) is depicted in Fig. (1) by applying appropriate parameter values. Equation (95) two-soliton solution is shown in Fig. (2). The three-soliton solution of Eq. (97) is shown in Fig. (3). The hyperbolic solutions to Eq. (98) are shown in Fig. (4). The resonances of Eq. (101) are shown in Fig. (5). The complex soliton solution of Eqs. (111) and (112) are shown in Figs. (6 and 7).
These graphical interpretations can be used to examine the propagation and interaction of solitons in a variety of physical systems and are crucial for comprehending the dynamics and behavior of the YTSF equation and its solutions.

Physical depiction of Eq. (93) at \(p_1=1.2,~p_2=1.1,~\gamma _{1}=0.22~and~\gamma _2=0.13\)

Physical depiction of Eq. (95) at \(\sigma _1=2.1,~\sigma _2=2,~\gamma _{1}=1.2,~\gamma _2=1.23.,~\sigma _3=1-.4,~\gamma _{3}=1.2~and~~\sigma _4=1.2,~\gamma _{4}=0.6\)

Physical depiction of Eq. (97) at \(\sigma _1=2,~\sigma _2=1,~\gamma _{1}=0.2,~\gamma _2=0.23,~\sigma _3=1.4,~\gamma _{3}=0.2,~\sigma _4=1.5,\)\(\gamma _{4}=0.4,~\sigma _5=1.6,~\gamma _{5}=0.9~and~\sigma _6=1.2,~\gamma _{6}=0.6\)

Physical depiction of Eq. (99) at \(\sigma _1=2.2,~\sigma _2=2.1,~\gamma _{2}=2.3,~\gamma _2=2.23,~\sigma _3=2.4,~\gamma _{3}=2.25,~\sigma _4=2.5,~\gamma _{4}=2.4,~\sigma _5=1.26,~\gamma _{5}=1.9~and~\sigma _6=-0.2,~\gamma _{6}=0.7\)

Physical depiction of Eq. (102) at \(p_1=1.2,~\gamma _2=0.21,~\gamma _{1}=1.2,~p_2=1.23\)

Physical depiction of Eq. (111) at \(\alpha _1=0.42,~\beta _1=0.9\)

Physical depiction of Eq. (112) at \(\alpha _1=1.42,~\beta _1=2.4\)
6 Conclusions
The YTSF equation has multi-soliton, resonant, and complex soliton solutions, which we obtain in this work. The DT technique, which is based on the Lax pair, can be used to find these solutions. The study of nonlinear wave dynamics in a variety of physical systems, such as fluid mechanics, plasma physics and nonlinear optics, will be significantly impacted by these results. With a few graphical illustrations, the characteristics of the derived solutions were explored. Through carefully choosing the parameter values, the different dynamical behaviors of derived solutions were explored in order to comprehend the physical difficulties. Several soliton features have been thoroughly described by modifying arbitrary functions. Overall, the paper contributes to ongoing research efforts to understand the behavior of nonlinear wave phenomena in various physical systems.
Data Availability
Since no datasets were created or examined during the current investigation, information sharing is not as relevant to this topic.
References
Abdulwahhab, M.A.: Comment on “Lie symmetry analysis, optimal system, new solitary wave solutions and conservation laws of the Pavlov equation’’ by Nardjess Benoudina and et al. [CNSNS 2021, 94: 105560]. Commun. Nonlinear Sci. Numer. Simul. 101, 105868 (2021)
Adeyemo, O.D., Khalique, C.M.: Analytic solutions and conservation laws of a (2+ 1)-dimensional generalized Yu-Toda-Sasa-Fukuyama equation. Chin. J. Phys. 77, 927–944 (2022)
Adeyemo, O.D., Motsepa, T., Khalique, C.M.: A study of the generalized nonlinear advection-diffusion equation arising in engineering sciences. Alex. Eng. J. 61(1), 185–194 (2022)
Adeyemo, O.D., Khalique, C.M., Gasimov, Y.S., Villecco, F.: Variational and non-variational approaches with Lie algebra of a generalized (3+ 1)-dimensional nonlinear potential Yu-Toda-Sasa-Fukuyama equation in Engineering and Physics. Alex. Eng. J. 63, 17–43 (2023)
Ahmad, J.: Dispersive multiple lump solutions and solitons interaction to the nonlinear dynamical model and its stability analysis. Eur. Phys. J. D 76(1), 14 (2022)
Ahmad, J.: Dynamics of optical and other soliton solutions in fiber bragg gratings with Kerr Law and stability analysis. Arab. J. Sci. Eng. 48(1), 803–819 (2023)
Ali, A., Ahmad, J., Javed, S.: Solitary wave solutions for the originating waves that propagate of the fractional Wazwaz-Benjamin-Bona-Mahony system. Alex. Eng. J. 69, 121–133 (2023)
Barman, H.K., Akbar, M.A., Osman, M.S., Nisar, K.S., Zakarya, M., Abdel-Aty, A.H., Eleuch, H.: Solutions to the Konopelchenko-Dubrovsky equation and the Landau-Ginzburg-Higgs equation via the generalized Kudryashov technique. Results Phys. 24, 104092 (2021)
Cakicioglu, H., Ozisik, M., Secer, A., Bayram, M.: Stochastic dispersive Schrodinger-Hirota equation having parabolic law nonlinearity with multiplicative white noise via Ito calculus. Optik 279, 170776 (2023)
Ding, Y., Liu, G., Zheng, L.: Equivalence of MTS and CMR methods associated with the normal form of Hopf bifurcation for delayed reaction diffusion equations. Commun. Nonlinear Sci. Numer. Simul. 117, 106976 (2023)
Dong, M.J., Tian, S.F., Wang, X.B., Zhang, T.T.: Lump-type solutions and interaction solutions in the (3+ 1)-dimensional potential Yu-Toda-Sasa-Fukuyama equation. Anal. Math. Phys. 9, 1511–1523 (2019)
Feng, Q.H.: Traveling wave solution of (3+ 1) dimensional potential-YTSF equation by Bernoulli sub-ODE method. Adv. Mater. Res. 403, 212–216 (2012)
Gao, X.Y., Guo, Y.J., Shan, W.R.: Cosmic dusty plasmas via a (3+ 1)-dimensional generalized variable-coefficient Kadomtsev-Petviashvili-Burgers-type equation: auto-Bäcklund transformations, solitons and similarity reductions plus observational/experimental supports. Waves Random. Complex. Media. 13, 1–21 (2021)
Gilson, C., Lambert, F., Nimmo, J., Willox, R.: On the combinatorics of the Hirota D-operators. Proc. Royal Soci. Lond. Series A: Math. Phys.Eng. Sci. 452(1945), 223–234 (1996)
Golovnev, A.: The variational principle, conformal and disformal transformations, and the degrees of freedom. J. Math. Phys. 64(1), 012501 (2023)
Gonze, X., Amadon, B., Antonius, G., Arnardi, F., Baguet, L., Beuken, J.M., Bieder, J., Bottin, F., Bouchet, J., Bousquet, E., Brouwer, N.: The ABINIT project: impact, environment and recent developments. Comput. Phys. Commun. 248, 107042 (2020)
Guo, M., Xie, X.: Binary Darboux transformation and interactions of solitons for a higher-order matrix nonlinear Schrödinger equation. Results Phys. 53, 106942 (2023)
Khalique, C.M., Adeyemo, O.D.: A study of (3+ 1)-dimensional generalized Korteweg-de Vries-Zakharov-Kuznetsov equation via Lie symmetry approach. Results Phys. 18, 103197 (2020)
Kheaomaingam, N., Phibanchon, S., Chimchinda, S.: Sine-Gordon expansion method for the kink soliton to Oskolkov equation. J. Phys: Conf. Ser. 2431(1), 012097 (2023)
Kristiansen, K.: Molecular mechanisms of ligand binding, signaling, and regulation within the superfamily of G-protein-coupled receptors: molecular modeling and mutagenesis approaches to receptor structure and function. Pharmacol Therapeutics 103(1), 21–80 (2004)
Leonenko, G., Phillips, T.N.: Transient numerical approximation of hyperbolic diffusions and beyond. J. Comput. Appl. Math. 422, 114893 (2023)
Li, B., Chen, Y.: Nonlinear partial differential equations solved by projective Riccati equations Ansatz. Zeitschrift For Naturforschung A 58(9–10), 511–519 (2003)
Li, X.L., Guo, R.: Interactions of localized wave structures on periodic backgrounds for the coupled lakshmanan-Porsezian-Daniel equations in birefringent optical fibers. Ann. Phys. 535(1), 2200472 (2023)
Li, N., Wang, G., Kuang, Y.: Multisoliton solutions of the Degasperis-Procesi equation and its shortwave limit: Darboux transformation approach. Theor. Math. Phys. 203(2), 608–620 (2020)
Lin, Z., Wen, X.Y.: Hodograph transformation, various exact solutions and dynamical analysis for the complex Wadati-Konno-Ichikawa-II equation. Phys. D 451, 133770 (2023)
Ma, W.X., Fan, E.: Linear superposition principle applying to Hirota bilinear equations. Comput. Math. Appl. 61(4), 950–959 (2011)
Ma, H.C., Yu, Y.D., Ge, D.J.: The auxiliary equation method for solving the Zakharov-Kuznetsov (ZK) equation. Comput. Math. Appl. 58(11–12), 2523–2527 (2009)
Malik, S., Hashemi, M.S., Kumar, S., Rezazadeh, H., Mahmoud, W., Osman, M.S.: Application of new Kudryashov method to various nonlinear partial differential equations. Opt. Quant. Electron. 55(1), 8 (2023)
Muatjetjejaa, B., Moretlob, T., Ademd, A.: Soliton solutions and other analytical solutions of a new (3+ 1)-dimensional novel KP like equation. Int. J. Nonlinear Anal. Appl. 14(1), 2623–2632 (2023)
Naidoo, N., Maharaj, S.D., Govinder, K.S.: Radiating stars and Riccati equations in higher dimensions. Eur. Phys. J. C 83(2), 1–17 (2023)
Perumalsamy, S., Hong, S., Knight, D., Riley, T.: Laboratory surveillance of paediatric Clostridium difficile infections in healthcare and community settings in Australia, from 2013 to at present. Int. J. Infect. Dis. 101, 438 (2020)
Raza, N., Arshed, S., Wazwaz, A.M.: Structures of interaction between lump, breather, rogue and periodic wave solutions for new (3+ 1)-dimensional negative order KdV-CBS model. Phys. Lett. A 458, 128589 (2023)
Raza, N., Butt, A.R., Arshed, S., Kaplan, M.: A new exploration of some explicit soliton solutions of q-deformed Sinh-Gordon equation utilizing two novel techniques. Opt. Quant. Electron. 55(3), 200 (2023)
Rehman, S.U., Bilal, M., Ahmad, J.: The study of solitary wave solutions to the time conformable Schrödinger system by a powerful computational technique. Opt. Quant. Electron. 54(4), 228 (2022)
Rezazadeh, H., Davodi, A.G., Gholami, D.: Combined formal periodic wave-like and soliton-like solutions of the conformable Schrodinger-KdV equation using the G\(^{\prime }\)/G-expansion technique. Results Phys. 47, 106352 (2023)
Shakeel, M., Shah, N.A., Chung, J.D.: Application of modified exp-function method for strain wave equation for finding analytical solutions. Ain Shams Eng. J. 14(3), 101883 (2023)
Shen, S., Yang, Z.J., Pang, Z.G., Ge, Y.R.: The complex-valued astigmatic cosine-Gaussian soliton solution of the nonlocal nonlinear Schrödinger equation and its transmission characteristics. Appl. Math. Lett. 125, 107755 (2022)
Singh, S., Ray, S.S.: Integrability and new periodic, kink-antikink and complex optical soliton solutions of (3+ 1)-dimensional variable coefficient DJKM equation for the propagation of nonlinear dispersive waves in inhomogeneous media. Chaos, Solitons & Fractals 168, 113184 (2023)
Verma, P., Kaur, L.: New exact solutions of the (4+ 1)-dimensional fokas equation via extended version of exp\((-\Psi (\kappa ))-\)expansion method. Int. J. Appl. Comput. Math. 7(3), 104 (2021)
Walls, F.L., Stein, T.S.: Observation of the \(G^{\prime }/G^2\) resonance of a stored electron gas using a bolometric technique. Phys. Rev. Lett. 31(16), 975 (1973)
Wazwaz, A.M.: Abundant solutions of various physical features for the (2+ 1)-dimensional modified KdV-Calogero-Bogoyavlenskii-Schiff equation. Nonlinear Dyn. 89(3), 1727–1732 (2017)
Wazwaz, A.M.: Multi-soliton solutions for integrable (3+ 1)-dimensional modified seventh-order Ito and seventh-order Ito equations. Nonlinear Dyn. 110(4), 3713–3720 (2022)
Wen, X.Y., Yan, Z.: Higher-order rational solitons and rogue-like wave solutions of the (2+ 1)-dimensional nonlinear fluid mechanics equations. Commun. Nonlinear Sci. Numer. Simul. 43, 311–329 (2017)
Wen, X.Y., Yan, Z.: Modulational instability and dynamics of multi-rogue wave solutions for the discrete Ablowitz-Ladik equation. J. Math. Phys. 59(7), 073511 (2018)
Wen, X.Y., Yang, Y., Yan, Z.: Generalized perturbation (n, M)-fold Darboux transformations and multi-rogue-wave structures for the modified self-steepening nonlinear Schrödinger equation. Phys. Rev. E 92(1), 012917 (2015)
Yang, X.F., Deng, Z.C., Wei, Y.: A Riccati-Bernoulli sub-ODE method for nonlinear partial differential equations and its application. Adv. Differ. Equ. 2015(1), 1–17 (2015)
Yao, S.W., Hashemi, M.S., Inc, M.: A Lie group treatment on a generalized evolution Fisher type equation with variable coefficients. Results Phys. 46, 106307 (2023)
Zahran, E.H., Arqub, O.A., Bekir, A., Abukhaled, M.: New diverse types of soliton solutions to the Radhakrishnan-Kundu-Lakshmanan equation. AIMS Math. 8(4), 8985–9008 (2023)
Zayed, E.M.E., Arnous, A.H.: Exact solutions of the nonlinear ZK-MEW and the potential YTSF equations using the modified simple equation method. AIP Conf. Proc. 1479(1), 2044–2048 (2012)
Funding
The authors declare that they have no any funding source.
Author information
Authors and Affiliations
Contributions
AA: Formal analysis, supervision, review and editing. JA: Reviewed, supervision, formal analysis and editing. SJ: Conceptualization, formal analysis, writing the original draft, review, software implementation and editing.
Corresponding author
Ethics declarations
Conflict of interest
The researchers assured that they have no competing interests. The authors have no relevant financial or non-financial interests to disclose.
Consent for publication
All authors have agreed and have given their consent for the publication of this research paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ali, A., Ahmad, J. & Javed, S. Dynamic investigation to the generalized Yu–Toda–Sasa–Fukuyama equation using Darboux transformation. Opt Quant Electron 56, 166 (2024). https://doi.org/10.1007/s11082-023-05562-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-023-05562-6