
Abstract
This paper presents a number of new solutions obtained for solving the nonlinear electrical transmission lines by using the improved Bernoulli sub-ODE method and the extended trial equation method. The proposed solutions are kink soliton solution, hyperbolic solution, trigonometric solution and bellshaped soliton solutions. Then our new results are compared with the well-known results. The methods used here are very simple and concise and can be also applied to other nonlinear partial differential equations. The balance number of these methods is not constant contrary to other methods. The proposed methods also allow us to construct many new types of exact solutions. By utilizing the Maple software package, we show that all obtained solutions satisfy the conditions of the studied model. More importantly, the solutions found in this work can have significant applications in telecommunication systems where solitons are used for codify data.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In recent years, to model and describe phenomena in various fields of science such as plasma physics, nonlinear optics, nonlinear transmission lines, solid state physics, chemical kinematics, and biology, to mention a few, we have generally used nonlinear equations. The popularity of these equations is because of their capacity to model many real systems. In fact, it has been discovered that many models in mathematics and physics are described by nonlinear partial differential equations. Accordingly, nonlinear equations have gained a very significant place in the current research. In this way, a challenging task is to look for solutions for these nonlinear equations. There has been an overwhelming progress in this line of research (Wang and Winful 1988; Matula 1979; Pelap and Faye 2005; Wazwaz 2006). The literature is replete with many methods for building exact solutions including the Exp-function method (Dehghan et al. 2011; Ekici et al. 2017; Manafian and Lakestani 2015c; Manafian 2015), the generalized Kudryashov method (Zhou et al. 2005), the extended Jacobi elliptic function expansion method (Ekici et al. 2017; Chen and Wang 2005; Zhou and Liu 2015; Mirzazadeh et al. 2016), the improve \(\tan (\phi /2)\)-expansion method (Manafian 2016a, b, 2017; Manafian and Lakestani 2015a, 2016a, b; Manafian et al. 2016a, b, c, d; Aghdaei and Manafian 2016; Zinati and Manafian 2017), the \(G'/G\)-expansion method (Manafian and Lakestani 2015b, 2017; Manafian et al. 2016c; Sindi and Manafian 2016; Sonmezoglu et al. 2017), the Bernoulli sub-equation function method (Baskonus and Bulut 2016a; Baskonus et al. 2016a; Bulut and Baskonus 2016), the sine-Gordon expansion method (Baskonus et al. 2016b; Baskonus and Bulut 2016b), the ansatz scheme (Zhou et al. 2016), the Ricatti equation expansion (Zhou 2016), the formal linearization method (Mirzazadeh and Eslami 2015), the extend \(\exp (-\Psi (\tau ))\)-expansion method (Taghizadeh et al. 2017; Mirzazadeh et al. 2017a), the Riccati method (Inc et al. 2016), and the Lie symmetry (Tchier et al. 2017). However, these methods can not satisfy all the existing nonlinear equations. For this reason, several new methods have to be explored. In this paper, building upon the improved Bernoulli sub-ODE method (Bulut and Baskonus 2016; Foroutan et al. 2017) and the extended trial equation method (Foroutan et al. 2017; Mohyud-Din and Irshad 2017; Mirzazadeha et al. 2017b), we derive many solutions which can help to understand the mechanism underlying different phenomena observed through a nonlinear transmission line described through the modified Zakharov–Kuznetsov (mZK) equation.
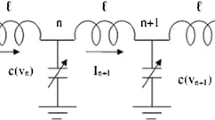
The model studied here is given by Fig. 1. Nonlinear electrical transmission lines (NETLs) (Tala-Tebue et al. 2014) are good examples to provide a useful way to check how the nonlinear excitations behave inside the nonlinear medium. They are constructed by periodically loading a normal transmission line with varactors or, alternatively, by arranging inductors and varactors in a 1-D lattice. The model used in this work consists of a nonlinear network with many coupled nonlinear LC dispersive transmission lines. We imagine that there are many identical dispersive lines which are coupled by means of capacitance \(C_s\) at each node, as shown in Fig. 1. Each section of line consists of a constant inductor L in the series branch and a nonlinear capacitor of capacitance \(C(V_{n,m})\) in the shunt branch. The nodes in the system are labeled with two discrete coordinates n and m, where n specifies the nodes in the direction of propagation of the wave, and m labels the lines in the transverse direction. The same model has been studied in Duan (2004). In his work, Duan derive a coupled Zakharov–Kuznetsov equation for a nonlinear transmission line and study the instability of this equation.

Schematic representation of the nonlinear electrical transmission line
Applying the Kirchhoff law on the model, one can easily obtain the following discrete differential equation:
where \(V_{n,m}=V_{n,m}(T)\) is the voltage in the transmission lines. The nonlinear charge in the shunt branch are voltage dependent and are given by
where \(\beta _1\) and \(\beta _2\) are constants. Inserting (1.2) into Eq. (1.1), we obtain
Setting \(V_{n,m}(T)=V(n,m,T)\), which means that n and m are treated as the continuous variables, we get the following equation
Via the independent variable transformations
where \(\chi\) is the formal parameter, \(v_s=1/(LC_0)\), and with the help of the reductive perturbation technique, then Eq. (1.4) can be reduced to the following modified mZK equation (Duan 2004; Sardar et al. 2015) as
where
Therefore, u(x, y, t) represents the first-order perturbation voltage in the coupled nonlinear electrical transmission lines, and the subscripts x, y and t denote the partial derivatives. The modified ZK equation (Yu et al. 2007) has received a great among of attention. Zhen et al. (2014) have given different expressions of the parameters of the mZK equation and by means of the Hirota method, bilinear forms and soliton solutions of the this equation were obtained. In the same way, Sardar et al. (2015) applied the (\(G'/G\))-expansion method, extended tanh method and sine-cosine method to obtain different kinds of solutions which are solitary, shock, singular, periodic, rational and kink-shaped solitons. For further information in about the mZK equation see Krishnan and Biswas (2010), Naranmandula and Wang (2005), Nozaki and Bekki (1983) and Panthee and Scialom (2010). The rest of the paper is organized as follows: In Sect. 2, we offer the improved Bernoulli sub-ODE method and its application to mZK equation. Also, in Sect. 3, we present the extended trial equation method along and discuss its use for the mZK equation. Finally conclusion is given in Sect. 4.
2 The improved Bernoulli sub-ODE method
The IBSOM is well-known analytical method which was improved and developed by Baskonus and Bulut (2016a). We consider the following stages
Step 1 We suppose that given nonlinear partial differential equation for u(x, t) to be in the form
which can be converted to an ODE
by the transformation \(\xi =r_1x+r_2y-r_3t\) is the wave variable. Also, \(r_1, r_2\) and \(r_3\) are constants to be determined later.
Step 2 Considering trial equation of solution in Eq. (2.2), it can be written as follows:
and according to the Bernoulli theory,
where \(F(\xi )\) is Bernoulli differential polynomial. Substituting the above relations in Eq. (2.2), we have an equation of polynomial \(\Psi (F(\xi ))\) of \(F(\xi )\):
According to the homogenous balance method, we can obtain the relationship between n, m, and \(\theta\).
Step 3 Let the coefficients of \(\Psi (F(\xi ))\) all be zero. Then it yields an equation system as follows:
Solving this system, we will determine the values of \(a_0, a_n\) and \(b_0, b_m\).
Step 4 By solving nonlinear Bernoulli differential equation (2.4), we obtain two cases according to b and d situations as follows:
where E is both the constant of integration and non-zero. Using a complete discrimination system for polynomial of \(F(\xi )\), we solve Eq. (2.6) with the help of Maple 13 and classify the exact solutions for Eq. (2.2). For a better interpretations of solutions obtained in this way, we can plot two- and three-dimensional surfaces of the solutions by taking suitable parameters.
2.1 Implementations of IBSOM
This illustrates the performance of the analytical algorithm proposed. To this end, we use the transformation \(u(x,y,t)=u(\xi )\) and \(\xi =r_1x+r_2y-r_3t\) to reduce Eq. (1.1) to the following nonlinear ODE:
Considering the Eqs. (2.3) and (2.4) for the homogenous balance method between \(u^3\) and \(u''\), we obtain the following relationship for m, n, and \(\theta\):
For different values of \(\theta , m,\) and n, we have the following cases:
Case I \(\theta =n=3, m=1\).
If we take \(\theta =n=3\) and \(m=1\) for Eq. (2.9), then we obtain
where \(F'=bF + dF^3\), \(b\ne 0\), \(d\ne 0\), \(a_3\ne 0\) and \(b_1\ne 0\). When we use Eqs. (2.11) and (2.13) in Eq. (2.9), we get a system of algebraic equations. Therefore, we attain a system of equations from the coefficients of polynomial of F. This system of equations is solved for the above parameters with the following cases of solutions:
Subcase I
Subcase II
Subcase III
For Subcase I, we have the following solution
For Subcase II, we have the following solution
For Subcase III, we have the following solution
Result 1 If we take (2.7) and (2.8), then we have the following solutions based on (2.14) and (2.17) as:
Result 2 If we take (2.7) and (2.8), then we have the following solutions based on (2.15) and (2.18) as:
Result 3 If we take (2.7) and (2.8), then we have the following solutions based on (2.16) and (2.19) as:
where
where
Case II \(\theta =3, n=2\), and \(m=0\).
If we take \(\theta =3, n=2,\) and \(m=0\) for Eq. (2.9), then we obtain
where \(F'=bF + dF^3\), \(b\ne 0\), \(d\ne 0\), \(a_2\ne 0\) and \(b_0\ne 0\). When we use Eqs. (2.26) and (2.28) in Eq. (2.9), we get a system of algebraic equations. Therefore, we attain a system of equations from the coefficients of polynomial of F. This system of equations is solved for the above parameters with the following cases of solutions as:
Subcase I
Subcase II
For Subcase I, we have the following solution
For Subcase II, we have the following solution
Result 1 If we take (2.7) and (2.8), then we have the following solutions based on (2.29) and (2.31) as:
Result 2 If we take (2.7) and (2.8), then we have the following solutions based on (2.30) and (2.32) as:
3 Extended trial equation method
The second method described here is the extended trial equation method used to find traveling wave solutions of nonlinear models which can be understood through the following steps:
Step 1 We assume that the given nonlinear PDE
Utilizing the wave transformation
where \(\lambda \ne 0\) and \(c\ne 0\). Substituting (3.2) into Eq. (3.1) yields a nonlinear ordinary differential equation,
Step 2 Take the transformation and trial equation as follows:
where
Using the Eqs. (3.4) and (3.5), we can find
where \(\Phi (\Gamma )\) and \(\Psi (\Gamma )\) are polynomials. Substituting these terms into Eq. (3.1) yields an equation of polynomial \(\Lambda (\Gamma )\) of \(\Gamma\):
According to the balance principle on (3.8), we can arrive at a relation of \(\theta , \epsilon\) and \(\delta\). We can take some values of \(\theta , \epsilon\) and \(\delta\).
Step 3 Setting each coefficient of polynomial \(\Lambda (\Gamma )\) to zero to derive a system of algebraic equations:
By solving the system (3.9), we will obtain the values of \(\xi _0,\xi _1,\ldots ,\xi _\theta\), \(\zeta _0,\zeta _1,\ldots ,\zeta _\sigma\) and \(\tau _0,\tau _1,\ldots ,\tau _\delta\).
Step 4In the following step, we obtain the elementary form of the integral by reduction of Eq. (3.5), as follows
where \(\eta _0\) is an arbitrary constant. We can classify the roots of \(\Phi (\Gamma )\) with the help of complete discrimination system for polynomials. Furthermore, we can write the exact traveling wave solutions to Eq. (3.1) respectively.
3.1 Implementations of ETEM
By processing manipulations on Eq. (1.1) and reducing to ODE by help the transformations \(u(x,y,t)=u(\eta )\) and \(\eta =r_1x+r_2y-r_3t\) get to the following nonlinear ODE:
Multiplying \(u'\) in (3.11) and integrating it we get the following equation
Substituting Eq. (3.7) in Eq. (3.12) and using the balance principle technique, between \(u^3\) and \(u''\), we obtain the following relationship for \(\delta , \theta\), and \(\epsilon\):
For different values of \(\delta , \theta\) and \(\epsilon\), we have the following cases:
Case I \(\delta =1, \theta =4, \epsilon =0\).
If we take \(\delta =1, \theta =4\), \(\epsilon =0\) for Eq. (2.9), then we obtain
where \(\xi _4\ne 0\) and \(\zeta _0\ne 0\). Solving the system of (3.9) yields
Substituting these results into Eqs. (3.5) and (3.10), we get
Integrating Eq. (3.17), we obtain the solutions for Eq. (1.1) as follows:
where
and
Also \(\alpha _1,\alpha _2,\alpha _3\) and \(\alpha _4\) are the roots of the polynomial equation
Substituting the solutions (3.18)–(3.23) into (3.4), we obtain the following traveling wave solutions for Eq. (1.1):
If we take \(\tau _0=-\tau _1\alpha _1\) and \(\eta _0=0\), then the solutions (3.26)–(3.30) can reduce to rational function solutions
traveling wave solutions
soliton solution
where \(\Pi _1=2(\alpha _1-\alpha _2)(\alpha _1-\alpha _3)\tau _1\) is the amplitude of the soliton, while \(v=r_3\) is the velocity and \(\Pi _2=\frac{\sqrt{(\alpha _1-\alpha _2)(\alpha _1-\alpha _3)}}{\Pi }\) is the inverse width of the soliton. On the other hand, if we take \(\tau _0=-\tau _1\alpha _2\) and \(\eta _0=0\), the Jacobi elliptic function solution (3.30) can be written in the form
If the modulus \(l\rightarrow 1\), then the solution (3.35) can be reduced to the solitary wave solution
where \(\alpha _3=\alpha _4\). If the modulus \(l\rightarrow 0\), then the solution (3.35) can be reduced to the solitary wave solution
where \(\alpha _2=\alpha _3\).
Case II \(\delta =1, \theta =5, \epsilon =1\).
If we take \(\delta =1, \theta =5\), and \(\epsilon =1\) for Eq. (2.9), then we obtain
where \(\xi _5\ne 0\) and \(\zeta _1\ne 0\). Solving the system of (3.9) yields
Substituting these results into Eqs. (3.5) and (3.10), we get
To integrate Eq. (3.41), we must discuss the following families:
Family 1 If \(\Gamma ^5+\frac{\xi _4}{\xi _5}\Gamma ^4+ \frac{\xi _3}{\xi _5}\Gamma ^3+\frac{\xi _2}{\xi _5}\Gamma ^2+\frac{\xi _1}{\xi _5}\Gamma +\frac{\xi _0}{\xi _5}\) can be written in the following form:
where \(\alpha _1\) is an arbitrary constant. Then, we have
or
Substituting (3.44) into (3.14), we get the exact solution of Eq. (1.1) in the form of:
Family 2 If \(\Gamma ^5+\frac{\xi _4}{\xi _5}\Gamma ^4+ \frac{\xi _3}{\xi _5}\Gamma ^3+\frac{\xi _2}{\xi _5}\Gamma ^2+\frac{\xi _1}{\xi _5}\Gamma +\frac{\xi _0}{\xi _5}\) can be written in the following form:
where \(\alpha _1\) and \(\alpha _2\) are arbitrary constants. Then, we have
where
Family 3 If \(\Gamma ^5+\frac{\xi _4}{\xi _5}\Gamma ^4+ \frac{\xi _3}{\xi _5}\Gamma ^3+\frac{\xi _2}{\xi _5}\Gamma ^2 +\frac{\xi _1}{\xi _5}\Gamma +\frac{\xi _0}{\xi _5}\) can be written in the following form:
where \(\alpha _1\) and \(\alpha _2\) are arbitrary constants. Then, we have
where
Family 4 If \(\Gamma ^5+\frac{\xi _4}{\xi _5}\Gamma ^4+ \frac{\xi _3}{\xi _5}\Gamma ^3+\frac{\xi _2}{\xi _5}\Gamma ^2+\frac{\xi _1}{\xi _5}\Gamma +\frac{\xi _0}{\xi _5}\) can be written in the following form:
where \(\alpha _1, \alpha _2\) and \(\alpha _3\) are arbitrary constants. Then, we have
where
Remark 1
The other Families are ignored for simplicity.
Remark 2
We also observe that some solutions found in this paper are the same as those obtained in Sardar et al. (2015) when \(l\rightarrow 1\) or when \(l\rightarrow 0\). The other results are new solutions not yet reported in the literature. We then suppose that these exact solutions may have significant applications in telecommunication systems where solitons are used to codify or for the transmission of data.
Note that All the obtained results have been checked with Maple 13 by putting them back into the original equation and found correct.
4 Conclusion
In this paper, we have used the improved Bernoulli sub-ODE method and the extended trial equation method for building exact soliton solutions of nonlinear electrical transmission lines described by a mZK equation. A comparison of our results and with those obtained in (Sardar et al. 2015; Zhen et al. 2014) by using the (\(G'/G\))-expansion method, the extended tanh method, the sine–cosine method and the Hirota method shows, that there are many new solutions in the present work. It is worth noting that the new solutions obtained by means of aforementioned methods confirm the correctness of those obtained by other methods. Not only, the newly obtained solutions are identical to already published results, but also further solutions have obtained. The solutions obtained in this paper can help to explain many phenomena observed in nonlinear electrical transmission lines. Therefore, these methods can be applied to study many other nonlinear partial differential equations which frequently arise in engineering, mathematical physics.
References
Aghdaei, M.F., Manafian, J.: Optical soliton wave solutions to the resonant Davey–Stewartson system. Opt. Quant. Electr. 48, 1–33 (2016)
Baskonus, H.M., Bulut, H.: Exponential prototype structures for \((2+1)\)-dimensional Boiti–Leon–Pempinelli systems in mathematical physics. Waves Random Complex Media 26, 201–208 (2016a)
Baskonus, H.M., Bulut, H.: New wave behaviors of the system of equations for the ion sound and Langmuir Waves. Waves Random Complex Media (2016). https://doi.org/10.1080/17455030.2016.1181811
Baskonus, H.M., Koç, D.A., Bulut, H.: New travelling wave prototypes to the nonlinear Zakharov–Kuznetsov equation with power law nonlinearity. Nonlinear Sci. Lett. A 7, 67–76 (2016a)
Baskonus, H.M., Bulut, H., Atangana, A.: On the complex and hyperbolic structures of longitudinal wave equation in a magneto-electro-elastic circular rod. Smart Mater. Struct. 25, 035022 (2016b)
Bulut, H., Baskonus, H.M.: New complex hyperbolic function solutions for the \((2+1)\)-dimensional dispersive long water-wave system. Math. Comput. Appl. 21, 6–10 (2016)
Chen, Y., Wang, Q.: Extended Jacobi elliptic function rational expansion method and abundant families of Jacobi elliptic functions solutions to \((1+1)\)-dimensional dispersive long wave equation. Chaos Solitons Fract. 24, 745–757 (2005)
Dehghan, M., Manafian, J., Saadatmandi, A.: Application of the exp-function method for solving a partial differential equation arising in biology and population genetics. Int. J. Num. Methods Heat Fluid Flow 21, 736–753 (2011)
Duan, W.S.: Nonlinear waves propagating in the electrical transmission line. Europhys. Lett. 66(2), 192–197 (2004)
Ekici, M., Zhou, Q., Sonmezoglu, A., Manafian, J., Mirzazadeh, M.: The analytical study of solitons to the nonlinear Schrödinger equation with resonant nonlinearity. Optik Int. J. Elec. Opt. 130, 378–382 (2017)
Ekici, M., Mirzazadeh, M., Sonmezoglu, A., Zhou, Q., Triki, H., Zaka Ullah, M., Moshokoa, S.P., Biswas, A.: Optical solitons in birefringent fibers with Kerr nonlinearity by exp-function method. Optik Int. J. Light Elec. Opt. 131, 964–976 (2017)
Foroutan, M.R., Zamanpour, I., Manafian, J.: Applications of IBSOM and ETEM for solving the nonlinear chains of atoms with long-range interactions. Eur. Phys. J. Plus 132(421), 1–18 (2017)
Inc, M., Kilic, B., Baleanu, D.: Optical soliton solutions of the pulse propagation generalized equation in parabolic-law media with space-modulated coefficients. Optics 127, 1056–1058 (2016)
Krishnan, E.V., Biswas, A.: Solutions to the Zakharov–Kuznetsov equation with higher order nonlinearity by mapping and ansatz methods. Phys. Wave Phenom. 18(4), 256–261 (2010)
Manafian, J.: On the complex structures of the Biswas–Milovic equation for power, parabolic and dual parabolic law nonlinearities. Eur. Phys. J. Plus 130, 1–20 (2015)
Manafian, J.: Optical soliton solutions for Schrödinger type nonlinear evolution equations by the \(tan(\phi /2)\)-expansion method. Optik 127, 4222–4245 (2016a)
Manafian, J.: Optical soliton solutions for Schrödinger type nonlinear evolutionequations by the \(tan(\phi /2)\)-expansion method. Optik Int. J. Electr. Opt. 127, 4222–4245 (2016b)
Manafian, J.: Application of the ITEM for the system of equations for the ion sound and Langmuir waves. Opt. Quant. Electr. 49(17), 1–26 (2017)
Manafian, J., Lakestani, M.: New improvement of the expansion methods for solving the generalized Fitzhugh–Nagumo equation with time-dependent coefficients. Int. J. Eng. Math. 2015, 1–35 (2015)
Manafian, J., Lakestani, M.: Solitary wave and periodic wave solutions for Burgers, Fisher, Huxley and combined forms of these equations by the \(G^{\prime }/G\)-expansion method. Pramana J. Phys. 130, 31–52 (2015b)
Manafian, J., Lakestani, M.: Optical solitons with Biswas–Milovic equation for Kerr law nonlinearity. Eur. Phys. J. Plus 130, 1–12 (2015c)
Manafian, J., Lakestani, M.: Application of \(tan(\phi /2)\)-expansion method for solving the Biswas–Milovic equation for Kerr law nonlinearity. Optik Int. J. Elec. Opt. 127, 2040–2054 (2016a)
Manafian, J., Lakestani, M.: Dispersive dark optical soliton with Tzitzéica type nonlinear evolution equations arising in nonlinear optics. Opt. Quant. Electr. 48, 1–32 (2016b)
Manafian, J., Lakestani, M.: Abundant soliton solutions for the Kundu–Eckhaus equation via \(tan(\phi /2)\)-expansion method. Optik Int. J. Electr. Opt. 127, 5543–5551 (2016c)
Manafian, J., Lakestani, M.: Optical soliton solutions for the Gerdjikov–Ivanov model via \(tan(\phi /2)\)-expansion method. Optik Int. J. Electr. Opt. 127, 9603–9620 (2016d)
Manafian, J., Lakestani, M.: A new analytical approach to solve some the fractional-order partial differential equations. Indian J. Phys. 91, 243–258 (2017)
Manafian, J., Aghdaei, M.F., Zadahmad, M.: Analytic study of sixth-order thin-film equation by \(tan(\phi /2)\)-expansion method. Opt. Quant. Electron 48, 1–16 (2016a)
Manafian, J., Lakestani, M., Bekir, A.: Application of a new analytical method for the Richards’ equation, based on the Brooks and Corey model. J. Porous Media 19(11), 975–991 (2016b)
Manafian, J., Lakestani, M., Bekir, A.: Comparison between the generalized tanh–coth and the \(G^{\prime }/G\)-expansion methods for solving NPDEs and NODEs. Pramana J. Phys. 87(95), 1–14 (2016c). https://doi.org/10.1007/s12043-016-1292-9
Matula, R.A.: Electrical resistivity of copper, gold, palladium, and silver. J. Phys. Chem. 8, 1147–1298 (1979)
Mirzazadeh, M., Eslami, M.: Exact multisoliton solutions of nonlinear Klein–Gordon equation in \(1+2\) dimensions. Eur. Phys. J. Plus 128, 1–9 (2015)
Mirzazadeh, M., Ekici, M., Sonmezoglu, A., Ortakaya, S., Eslami, M., Biswas, A.: Soliton solutions to a few fractional nonlinear evolution equations in shallow water wave dynamics. Eur. Phys. J. Plus 131(166), 1–11 (2016)
Mirzazadeh, M., Ekici, M., Zhou, Q., Sonmezoglu, A.: Analytical study of solitons in the fiber waveguide with power law nonlinearity. Superlattices Microstruct. 101, 493–506 (2017a)
Mirzazadeha, M., Ekici, M., Zhou, Q., Biswas, A.: Exact solitons to generalized resonant dispersive nonlinear Schrödinger’s equation with power law nonlinearity. Optik 130, 178–183 (2017b)
Mohyud-Din, S.T., Irshad, A.: Solitary wave solutions of some nonlinear PDEs arising in electronics. Opt. Quant. Electron. 49, 130–145 (2017). https://doi.org/10.1007/s11082-017-0974-y
Naranmandula, N., Wang, K.X.: New spiky and explosive solitary wave solutions for further modified Zakharov–Kuznetsov equation. Phys. Lett. A 336, 112–116 (2005)
Nozaki, K., Bekki, N.: Chaos in a perturbed nonlinear Schrdinger equation. Phys. Rev. Lett. 50, 1226–1237 (1983)
Panthee, M., Scialom, M.: Asymptotic behavior for a class of solutions to the critical modified Zakharov–Kuznetsov equation. Stud. Appl. Math. 124, 229–245 (2010)
Pelap, F.B., Faye, M.: Solitonlike excitations in a one-dimensional electrical transmission line. J. Math. Phys. 46, 1–10 (2005)
Sardar, A., Husnine, S.M., Rizvi, S.T.R., Younis, M., Ali, K.: Multiple travelling wave solutions for electrical transmission line model. Nonlinear Dyn. (2015). https://doi.org/10.1007/s11071-015-2240-9
Sindi, C.T., Manafian, J.: Wave solutions for variants of the KdV-Burger and the K(n, n)-Burger equations by the generalized \(G^{\prime }/G\)-expansion method. Math. Methods Appl. Sci. 87, 1–14 (2016)
Sonmezoglu, A., Ekici, M., Moradi, M., Mirzazadeh, M., Zhou, Q.: Exact solitary wave solutions to the new \((3+1)\)-dimensional generalized Kadomtsev–Petviashvili equation. Optik Int. J. Light Electr. Opt. 128, 77–82 (2017)
Taghizadeh, N., Zhou, Q., Ekici, M., Mirzazadeh, M.: Soliton solutions for Davydov solitons in \(\alpha\)-helix proteins. Superlattices Microstruct. 102, 323–341 (2017)
Tala-Tebue, E., Tsobgni-Fozap, D.C., Kenfack-Jiotsa, A., Kofane, T.C.: Envelope periodic solutions for a discrete network with the Jacobi elliptic functions and the alternative (G’/G)-expansion method including the generalized Riccati equation. Eur. Phys. J. Plus 129(136), 1–10 (2014)
Tchier, F., Yusuf, A., Aliyu, A.I., Inc, M.: Soliton solutions and conservation laws for lossy nonlinear transmission line equation. Superlattices Microstruct. 107, 320–336 (2017)
Wang, S., Winful, H.: Dynamics of phase-locked semiconductor laser arrays. Appl. Phys. Lett. 52, 1774–1776 (1988)
Wazwaz, A.M.: Reliable analysis for nonlinear Schrödinger equations with a cubic nonlinearity and a power law nonlinearity. Math. Comput. Model. 43, 178–184 (2006)
Yu, J., Zhang, W.J., Gao, X.M.: Dynamical behavior in the perturbed compound KdVBurgers equation. Chaos Solitons Fractals 33, 1307–1313 (2007)
Zhen, H.-L., Tian, B., Zhong, H., Jiang, Y.: Dynamic behaviors and soliton solutions of the modified Zakharov–Kuznetsov equation in the electrical transmission line. Comput. Math. Appl. 68(5), 579–588 (2014)
Zhou, Q.: Optical solitons in medium with parabolic law nonlinearity and higher order dispersion. Waves Random Complex Media 25, 52–59 (2016)
Zhou, Q., Liu, S.: Dark optical solitons in quadratic nonlinear media with spatio-temporal dispersion. Nonlinear Dyn. 81, 733–738 (2015)
Zhou, Q., Ekici, M., Sonmezoglu, A., Manafian, J., Khaleghizadeh, S., Mirzazadeh, M.: Exact solitary wave solutions to the generalized Fisher equation. Optik Int. J. Light Electron Opt. 127, 12085–12092 (2005)
Zhou, Q., Mirzazadeh, M., Zerrad, E., Biswas, A., Belic, M.: Bright, dark, and singular solitons in optical fibers with spatio-temporal dispersion and spatially dependent coefficients. J. Modern Opt. 63, 950–954 (2016)
Zinati, R.F., Manafian, J.: Applications of He’s semi-inverse method, ITEM and GGM to the Davey–Stewartson equation. Eur. Phys. J. Plus 132, 1–26 (2017)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Manafian, J., Jalali, J. & Ranjbaran, A. Applications of IBSOM and ETEM for solving a discrete electrical lattice. Opt Quant Electron 49, 406 (2017). https://doi.org/10.1007/s11082-017-1239-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-017-1239-5