
Abstract
Variable coefficients (3+1)-generalized shallow water wave equation (GSWE) is investigated via modified Hirota bilinear method. This method is presented for the first time. Compared with other methods, it solves solution without setting solution and calculates transformations without making logarithmic transformations. The rational transformation is first utilized to transform GSWE. According to homogeneous balance principle, the relation between F and G in rational transformation can be calculated by utilizing. Solutions that included rogue wave solutions, interaction solutions, breather solutions and so on, are obtained and depicted graphically. Figures are given out to the dynamic characteristics of the solution. Furthermore, the results obtained demonstrate that this approach is more direct, generalized, effective and holds for many nonlinear partial differential equations.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear issue is an interdisciplinary subject which studies nonlinear phenomena. Research activities on solitons theory have attracted more attention with expanded applications in many scientific fields. Therefore, it is very important and meaningful to consider the solution of nonlinear partial differential equations (NLPDEs). Recently, several effective methods have been established, including \(\frac{G'}{G}-\)expansion method [1,2,3,4,5], exp-expansion method [6,7,8,9,10], auxiliary equation method [8, 11, 12], the symmetric transformation [12, 13], Backlund transformation [14], and so on. These methods are used to investigate integrability and different exact solutions. But most solutions are only solitary wave solutions. With the introduction of Hirota bilinear method [15,16,17,18,19, 24, 25], linear superposition principle and perturbation method are applied to extensively solve multi-soliton solutions, rogue wave solutions and others. Hirota bilinear method enriches the solutions of NLPDEs. The discovery of multi-soliton solutions via a direct method was done by Ryogo Hirota [16], but there are no considering rogue wave solutions and others. The author has used bilinear derivative operators to derive Ito equation to bilinear form, and successfully solved multi-soliton and lump solutions [25]. However, research of most scholars is in constant coefficient NLPDEs. For comprehensive understanding the physical phenomena and features, NLPDEs with variable coefficients have been became particularly significant. In the literature [18], rogue wave and lump solutions of variable coefficient B-type Kadomtsev–Petviashvili equation have thus been calculated with Hirota bilinear method. These solutions arouse wide concern of the scientists to the traveling multi-wave and play an important role in nonlinear sciences, such as optical fiber communications, fluid dynamics and plasma physics.
In a large number of literature, the linear superposition principle and its extended have provided a direct way of searching multi-soliton solutions, rogue wave solutions and others from the bilinear equations. But there are few research on NLPDEs with variable coefficients. Therefore, this work analyzes (3+1)-dimensional variable coefficients generalized shallow water equation(GSWE) [15, 20,21,22], which is used to describe traveling wave propagation in ocean, estuary, atmosphere and tsunami prediction.
where \(\alpha (t),\beta (t),\gamma (t),\delta (t)\) are real functions. Additionally, Eq. (1) can easily become \(Jimbo--Miwa\) equation [16, 24]
which is derived by KP equation, and if \(z=y,u_{yt}=u_{xt}\), Eq. (1) can reduce to (2+1) GSWE [21]
As we all know, bilinear formulism satisfies linear superposition principle. And many equations can be transformed under the transformation
where \(f=f(x,y,t)\) is assumed as follows:
where \(a_{i}, k_{j}\) are the complex constants, \(i,j=1,2,3,\cdots \) For instance, f composed for two polynomial functions is used to solve lump solutions, f composed for many exponential functions is used in multi-soliton solutions, f composed for exponential, trigonometric and hyperbolic functions is used in breather solutions, etc. There is a feature that f is composed for kinds of functions.
Thus, the main thought is that these functions in f are tried to generalize as auxiliary equation function
which is introduced by Wang Mingliang [1] in 2008. And its solution is
where \(\varDelta =\lambda ^2+4\mu \), \(\lambda ,\mu ,b_{1},b_{2}\) are the constants. In Sect. 2, (3+1)-dimensional variable coefficients GSWE is successfully calculated via modified Hirota bilinear method. The solutions will be generated from exponential, polynomial, trigonometric and hyperbolic functions. Finally, some conclusions are given in Sect. 3.
2 Application for (3+1)-D variable coefficients GSWE
For facilitating calculation, via inserting
into Eq. (1) and integrating it with respect to x yields, Eq. (1) can be transformed into an equivalent form
Then, substituting the rational transformation
into Eq. (7), and an equation about F(x, y, z, t) and G(x, y, z, t) can be obtained
Next \(\varPhi \) and \(\varPsi \) selected from Eq. (9) add to zero, and the relation between F(x, y, z, t) and G(x, y, z, t) can be obtained. \(\varPhi \) and \(\varPsi \) meet the following conditions.
-
1.
\(\varPhi \) is obtained by rational transformation of the highest order linear term in Eq. (7); \(\varPsi \) is obtained by rational transformation of the highest power nonlinear term in Eq. (7).
-
2.
\(\varPhi \) and \(\varPsi \) are formed from F(x, y, z, t), G(x, y, z, t) and their first-order differentials.
In short, via equating the coefficients of \(\frac{1}{G^{5}}\) to zero in Eq. (9), the relation can be obtained
When Eq. (10) is substituted into Eq. (9), the bilinear form of GSWE is calculated
According to the above in Sect. 1, auxiliary equation function are used to generalize functions in f and to derive solutions for Eq. (1). So the transformation (12) and auxiliary equation(13) are introduced
where \(a_{i}(i=1-4,6-9),\lambda _{f},\lambda _{g},\mu _{f},\mu _{g}\) are real constants, \(a_{5}(t),a_{10}(t)\) are real functions. In addition, Eq. (13) is essentially Eq. (4). When the parameters of auxiliary equation is evaluated for different values, \(g(\xi ),f(\eta )\) will present different function forms.
According to Eqs. (6), (8), (10), transformation (12) and introduce auxiliary equation(13), the initial solution is obtained
It is obvious from the initial solution that a lot of unknowns for \(a_{i},f(\eta ),g(\xi )\) are considered. So substituting transformation (12) into Eq.(11) and equating all the coefficients of the \(f^{j}g^{k}(f')^{l}(g')^{m}(j,k,l,m=0,1,2\cdots )\) term to zero, we have the following sets of constraints:
Family-1
where \(a_{11}\) is integration constant. With help of the above solved relationship and translation Eq. (12), we have
Since the parameters of the auxiliary equation are unknown quantities, the solutions are considered as the following three cases.
Case 1 If the parameters are taken as
\(g(\xi _{1})\) and \(f(\eta _{1})\) are identified as hyperbolic function because of solution of the auxiliary equation Eq. (5). According to \(g(\xi _{1})\) and \(f(\eta _{1})\) considered in the previous article, the initial solution Eq. (14) and parameters Eqs. (15), (16), these results give the soliton solution
Case 2 If the parameters are taken as
\(g(\xi _{1})\) and \(f(\eta _{1})\) are identified as trigonometric functions by Eq. (5). According to Eq. (15), Eqs. (16) and (14), the periodic soliton solution is analogized
Case 3 If the parameters are taken as
\(g(\xi _{1})\) and \(f(\eta _{1})\) are identified as polynomial functions by Eq. (5). According to Eqs. (15), (16) and (14), the rational soliton solution is obtained
From (15), \(\varDelta _{g}\) and \(\varDelta _{f}\) are linearly correlated, and have the same positive and negative properties. Therefore, \(f(\xi _{1})\) and \(g(\eta _{1})\) have the same function form. The localized structures of Eqs. (18), (20) with Eq. (22) for particular values of the parameters are shown in Fig. 1. The 3D graph corresponding to solutions is drawn, wherein we take \(a_{1}=a_{2}=a_{4}=a_{7}=a_{11}=b_{1g}=a_{9}=\mu _{g}=b_{2f}=1,b_{2g}=2,a_{3}=a_{6}=b_{1f}=-1,\alpha (t)=t,\beta (t)=\gamma (t)=1\) for \(u_{1}\), \(a_{1}=a_{2}=a_{4}=a_{7}=a_{11}=b_{1g}=a_{9}=b_{2f}=1,b_{2g}=2,a_{3}=a_{6}=\mu _{g}=b_{1f}=-1,\alpha (t)=t,\beta (t)=\gamma (t)=1\) for \(u_{2}\), and \(a_{1}=a_{2}=a_{4}=a_{7}=a_{11}=b_{1g}=1,a_{6}=a_{9}=b_{2f}=2,a_{3}=b_{1f}=-1,b_{2g}=2,\alpha (t)=t,\beta (t)=\gamma (t)=1\) for \(u_{3}\).

3D graph of \(u_{1}\)(left),\(u_{2}\),\(u_{3}\)(right)
Family-2
And then, we have
Here, the solution is considered as follows.
Case 1 If the parameters is taken as
\(g(\xi _{2})\) and \(f(\eta _{2})\) are identified as mixture of hyperbolic and exponential functions through Eq. (5). According to Eqs. (23), (24) and (14), solution is
where
The 3D graph and contour graph corresponding to solutions are drawn in Fig. 2, wherein we take \(a_{1}=a_{2}=a_{9}=a_{11}=1,a_{3}=a_{4}=-1,a_{6}=-2,b_{1g}=2b_{2g}=2b_{1f}=b_{2f}=\lambda _{g}=2,\alpha (t)=1,\beta (t)=\cos (t),\gamma (t)=1.\)

3D graph (up) and contour graph (down) of \(u_{4}\) at \(\varDelta _{f}>0(\lambda _{f}=1,\mu _{f}=\frac{3}{4})\)
Case 2 If the parameters are taken as
\(g(\xi _{2})\) is mixture of hyperbolic and exponential functions, \(f(\eta _{2})\) is mixture of trigonometric and exponential functions. In particular, form of the solution \(u_{5}\) in this case is analogous to last case. Thus, we can obtain
whereas
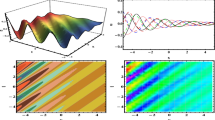
The 3D graph and contour graph corresponding to solutions are drawn in Fig. 3, wherein we take \(a_{1}=a_{2}=a_{9}=a_{11}=1,a_{3}=a_{4}=-1,a_{6}=-2,b_{1g}=-1,b_{2g}=b_{1f}=1,b_{2f}=0,\lambda _{g}=2,\alpha (t)=\beta (t)=1,\gamma (t)=t.\)

3D graph (up) and contour graph (down) of \(u_{5}\) at \(\varDelta _{f}>0(\lambda _{f}=1,\mu _{f}=\frac{3}{4})\)
Case 3 If the parameters are taken as
\(g(\xi _{2})\) is polynomial function, \(f(\eta _{2})\) is mixture of hyperbolic and exponential functions. Likewise, solution is obtained
where \(f(\eta _{2})=G_{1}|_{\zeta =\eta _{2},\lambda =\lambda _{f},\mu =\mu _{f},b_{1}=b_{1f},b_{2}=b_{2f}}\) Eq. (27). The 3D graph and contour graph corresponding to solutions are drawn in Fig. 4, wherein we take \(a_{1}=a_{3}=a_{6}=1,a_{2}=a_{4}=a_{11}=-1,a_{9}=2,2b_{1g}=b_{2g}=2b_{1f}=b_{2f}=2,\lambda _{g}=0,\alpha (t)=1,\gamma (t)=\cos (t)\).

3D graph (up) and contour graph (down) of \(u_{6}\) at \(\varDelta _{f}>0(\lambda _{f}=1,\mu _{f}=\frac{15}{4})\)
Case 4 If the parameters are taken as
the solution form in this case is analogous to last case. And then, solution is obtained
whereas \(f(\eta _{2})=G_{2}|_{\zeta =\eta _{2},\lambda =\lambda _{f},\mu =\mu _{f},b_{1}=b_{1f},b_{2}=b_{2f}}\) Eq. (30). The 3D graph and contour graph corresponding to solutions are drawn in Fig. 5, wherein we take \(a_{1}=a_{3}=a_{6}=1,a_{2}=a_{4}=a_{11}=-1,a_{9}=2,b_{1g}=b_{2g}=b_{1f}=b_{2f}=1,\lambda _{g}=0,\alpha (t)=1,\gamma (t)=t.\)

3D graph (up) and contour graph (down) of \(u_{7}\) at \(\varDelta _{f}<0(\lambda _{f}=0,\mu _{f}=-1)\)
In Family-2, \(\varDelta _{g}\) is non-negative, and is linearly independent with \(\varDelta _{f}\). Therefore, there are 6 cases to consider. But cases for
are not shown. \(g(\xi _{2})\) and \(f(\eta _{2})\) are hyperbolic function and mixture of polynomial and exponential functions in (I), but are polynomial function and mixture of hyperbolic and exponential functions in \(u_{6}\), so solutions in case 3 and (I) possess the similar function form. The same is true that solution form in (II) is similar to \(u_{3}\), because \(g(\xi _{2})\) and \(f(\eta _{2})\) are polynomial function and its and exponential functions mixed function. Hence, only four solutions are shown. From the graphs, it is evident that the \(\alpha (t),\beta (t),\gamma (t)\) influences the development of the wave. According to the case 1 and Eq. 23, \(g(\xi _{2})\) and \(f(\eta _{2})\) could be changed from mixture of hyperbolic and exponential functions to exponential functions, so \(u_{4}\) is a kink wave with a height difference in Fig. 2. \(u_{4}\) in influence of variable coefficients \(\beta (t)=\cos (t)\) has a periodic change, but its whole direction with time t has no variation. Figures 3, 4 and 5 are rogue wave. Figures 3 and 5 have tended to be symmetrical under the influence of \(\gamma (t)=t\). In addition, Fig. 4 is also under \(\beta (t)=\cos (t)\) and shows a complete periodic about x, y and time t. It is clearly found that \(u_{6}\) changes dramatically from time 4 to 5.5.
Family-3
And then, we have
The solution is considered as follows.
Case 1
If the parameters are taken as
\(g(\xi _{3})\) is hyperbolic functions, \(f(\eta _{3})\) is mixture of hyperbolic and exponential functions. Solution is obtained
where
The 3D graph, contour graph and 2D graph corresponding to solutions are drawn in Fig. 6, wherein we take \(a_{1}=a_{2}=a_{8}=a_{10}=a_{11}=1,a_{6}=-1,a_{9}=3,2b_{1g}=b_{2g}=2b_{1f}=b_{2f}=2,\mu _{g}=1,\alpha (t)=1,\beta (t)=\gamma (t)=t\).

\(u_{8}\) at \(\varDelta _{f}>0(\mu _{f}=\frac{3}{4},\lambda _{f}=1)\)
Case 2 If the parameters is taken as
\(g(\xi _{3})\) is hyperbolic functions, \(f(\eta _{3})\) is mixture of trigonometric and exponential functions. Solution is obtained
where
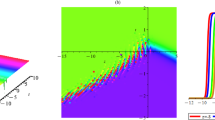
The 3D graph, contour graph and 2D graph corresponding to solutions are drawn in Fig. 7, wherein we take \(a_{1}=a_{2}=a_{8}=a_{10}=a_{11}=\mu _{g}=1,a_{6}=-1,a_{9}=3,2b_{1g}=b_{2g}=2b_{1f}=b_{2f}=2,\alpha (t)=1,\beta (t)=\gamma (t)=t\).

\(u_{9}\) at \(\varDelta _{f}<0(\mu _{f}=-\frac{5}{4},\lambda _{f}=1)\)
Case 3 If the parameters are taken as
solution is obtained
where \(f(\eta _{3})=G_{1}|_{\zeta =\eta _{3},\lambda =\lambda _{f},\mu =\mu _{f},b_{1}=b_{1f},b_{2}=b_{2f}}\) Eq. (39). The 3D graph, contour graph and 2D graph corresponding to solutions are drawn in Fig. 8, wherein we take \(a_{1}=a_{2}=a_{8}=a_{11}=1,a_{6}=5,a_{9}=3,a_{10}=0,2b_{1g}=b_{2g}=2b_{1f}=b_{2f}=2,\mu _{g}=-1,\alpha (t)=1,\beta (t)=\gamma (t)=t\).

\(u_{10}\) at \(\varDelta _{f}>0(\mu _{f}=\frac{3}{4},\lambda _{f}=1)\)

\(u_{11}\) at \(\varDelta _{f}<0(\mu _{f}=-\frac{5}{4},\lambda _{f}=-1)\)

\(u_{12}\) at \(\varDelta _{f}<0(\mu _{f}=-1,\lambda _{f}=2)\)
Case 4 If the parameters are taken as
solution is obtained
where \(f(\eta _{3})=G_{2}|_{\zeta =\eta _{3},\lambda =\lambda _{f},\mu =\mu _{f},b_{1}=b_{1f},b_{2}=b_{2f}}\) Eq. (42). The 3D graph, contour graph and 2D graph corresponding to solutions are drawn in Fig. 9, wherein we take \(a_{1}=a_{2}=a_{8}=a_{11}=1,a_{6}=5,a_{9}=3,a_{10}=0,2b_{1g}=b_{2g}=2b_{1f}=b_{2f}=2,\mu _{g}=-1,\alpha (t)=1,\beta (t)=\gamma (t)=t\).
Case 5 If the parameters are taken as
solution is obtained
where
The 3D graph, contour graph and 2D graph corresponding to solutions are drawn in Fig. 10, wherein we take \(a_{1}=a_{2}=a_{8}=a_{11}=1,a_{6}=5,a_{9}=3,a_{10}=0,2b_{1g}=b_{2g}=2b_{1f}=b_{2f}=2,\mu _{g}=-1,\alpha (t)=\beta (t)=\gamma (t)=t\).
Family-3, \(\varDelta _{g}\) and \(\varDelta _{f}\) is linearly independent. When \(\varDelta _{g}\) takes a certain value, there are three cases for \(\varDelta _{f}\). So there are 9 cases that need to be analyzed. But cases for
are not shown. Periodic solutions, which are similar to \(u_{6}\), are obtained when some parameters are set to (I) and (II); rogue wave solutions, which are similar to \(u_{7}\) are obtained when some parameters are set to (III); soliton solutions, which are similar to \(u_{3}\) are obtained when some parameters are set to (IV). The analysis is the same as Family-2. Therefore, only five solutions are shown. It is obvious from the image that Fig. 7 is rogue wave solution, and Fig. 8 is breather solution. g and f in \(u_{8}\) are hyperbolic functions and mixture of hyperbolic and exponential functions, so solution \(u_{8}\) is similar to \(u_{4}\) and can be constructed from exponential functions. However, there is no kink in Fig. 6. According to image Fig. 6 display, \(u_{8}\) is interaction solution via exponential form [19]. Through 2D graph, we can obtain the dynamic behavior of solving solution with x, y, z, t. In Figs. 9 and 10, we have the x-periodic and y-periodic soliton structures of solutions. The alternation of light and dark of soliton can be observed in Fig. 9.
3 Conclusions
This work studied (3+1)-dimensional variable coefficients GSWE. Via rational transformation, the bilinear formulism of Eq. (1) is determined. Thereafter, the corresponding system of algebraic equations is constructed by introduced auxiliary equation. The results obtained demonstrate that modified Hirota bilinear method possesses the following advantages: it can deal with the relationship between the highest order linear term and the highest order nonlinear term; it avoids the problems arising from setting the solution and transforming the bilinear formulism; it successfully calculates a large number of solutions included rogue wave solutions, interaction solutions, breather solutions. In order to better understand the physical phenomena, 3D, contour and 2D graph were showed by choosing appropriate values of the parameter. Through the graph analysis of the solution, we clearly find that \(\alpha (t),\beta (t),\gamma (t)\) affects the trend of wave movement. In particular, when variable coefficients \(\beta (t)=\cos (t)\), the travels of \(u_{6}\) is periodic changes. Via calculation result, the variable coefficients \(\beta (t)\) and \(\delta (t)\) need to satisfy certain conditions. This method used in this paper is reliable to search the exact solutions of other nonlinear models. These results provide useful information and new ideas for the study of nonlinear problems with variable coefficients.
Data availability
The datasets generated analyzed during the current study are not publicly available, but are available from the corresponding author on reasonable request.
References
Wang, M.L., Li, X.Z., Zhang, J.L.: The \(G^{\prime }/G\)-expansion method and travelling wave solutions of nonlinear evolution equations in mathematical physics. Phys. Lett. A 372(4), 417–423 (2008)
Jing, Pang, Ling-Hua, Jin, Qiang, Zhao: Nonlinear evolution equation with variable coefficient \(G^{\prime }/G\)-expansion solution. Acta Physica Sinica 61(14), 1–5 (2012)
Elsayed, M.E. Zayed., Ibrahim, S.A. Hoda., Mona, E.M. Elshater.: Solitons and other solutions to higher order nonlinear Schrdinger equation with non-Kerr terms using three mathematical methods. Optik-Int. J. Light Electron. Opt. 127(22), 10498–10509 (2016)
Shakeel, M., Mohyud-Din, S.: Modified \(G^{\prime }/G\)-expansion method with generalized riccati equation to the sixth-order boussinesq equation. Italian J. Pure Appl. Math. 30, 393–410 (2013)
Zheng, B.: New exact traveling wave solutions for three nonlinear evolution equations. WSEAS Trans. Computers 9(6), 624–633 (2010)
Bekir, A., Aksoy, E.: Exact solutions of nonlinear evolution equations with variable coefficients using exp-function method. Appl. Math. Comput. 217(1), 430–436 (2010)
Ma, Wen-Xiu., Huang, Tingwen, Zhang, Yi.: A multiple exp-function method for nonlinear differential equations and its application. Physica Scripta 82(6), 5468–5478 (2010)
Si, R.D.R.J.: Traveling wave solutions for nonlinear wave equations: Theory and applications of the auxiliary equation method, 1–184. Science Press, Beijing (2019)
Ray, S.S.: New analytical exact solutions of time fractional KdV-KZK equation by Kudryashov methods. Chin. Phys. B 4(35), 34–40 (2016)
Hedli, Riadh: Exact traveling wave solutions to the fifth-order KdV equation using the exponential expansion method. Iaeng Int. J. Appl. Math. 50(1), 121–126 (2020)
Pang, J., Bian, C.Q., Chao, L.: New auxiliary equation method for solving the KdV equation. Appl. Math. Mech. 31(7), 884–890 (2010)
Li, Z.B.: Traveling wave solutions of nonlinear mathematical physics equations, 1–156. Science Press, Beijing (2006)
Ghanbari, B., Kumar, S., Niwas, M.: The Lie symmetry analysis and exact Jacobi elliptic solutions for the Kawahara-KdV type equations. Results Phys. 23(7), 104006 (2021)
Fuchssteiner, B., Fokas, A.S.: Symplectic structures, their Backlund transformations and hereditary symmetries. Physica D Nonlinear Phenomena 4(1), 47–66 (1981)
Kuo, Chun-Ku., Ghanbari, Behzad: On novel resonant multi-soliton and wave solutions to the (3+1)-dimensional GSWE equation via three effective approaches. Results Phys. 26, 104421 (2021)
Hirota, R.: The direct method in solition theory, 1–57. Cambridge University, Cambridge (2004)
Peng, Y., Taogetu, S.: Multiple soliton solution of the(3+1)-dimensional Hirota bilinear soliton equation. Math. Appl. 33(1), 165–171 (2020)
Zhang, Y.-N., Pang, J.: To construct solutions of the dimensionally reduced variable-coefficient B-type Kadomtsev-Petviashvili equation. J. Math. 39(1), 121–127 (2019)
Ahmed, S., Ashraf, R., Seadawy, A.R.: Lump, multi-wave, kinky breathers, interactional solutions and stability analysis for general (2+1)-rth dispersionless Dym equation. Results Phys. 25(4), 104160 (2021)
Solitons and Infinite-Dimensional Lie Algebras: JIMBO, Michio, MIWA. Publ. Res. Instit. Math. Sci. 19, 943–1001 (1983)
Clarkson, P.A., Mansfield, E.L.: On a shallow water wave equation. Nonlinearity 7(3), 975–1000 (1994)
Huang, Q.M., Gao, Y.T., Jia, S.L.: Bilinear Backlund transformation, soliton and periodic wave solutions for a (3+1)-dimensional variable-coefficient generalized shallow water wave equation. Nonlinear Dyn. 87(4), 2529–2540 (2016)
Boiti, M., Leon, J.P., Manna, M.: On the spectral transform of a Korteweg-de Vries equation in two spatial dimensions. Inverse Probl. 2(3), 271–279 (1985)
Tang, Y., Zhang, Q., Zhou, B., et al.: General high-order rational solutions and their dynamics in the (3+1)-dimensional Jimbo-Miwa equation. Nonlinear Dyn. 109, 2029–2040 (2022)
Wazwaz, A.M.: Integrable (3+1)-dimensional Ito equation: variety of lump solutions and multiple-soliton solutions. Nonlinear Dyn. 109, 1929–1934 (2022)
Funding
This work was supported by the National Natural Science Foundation of China (Grant numbers 11561051).
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Material preparation, data collection and analysis were performed by Tianle Yin and Jing Pang. The first draft of the manuscript was written by Tianle Yin and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Yin, T., Xing, Z. & Pang, J. Modified Hirota bilinear method to (3+1)-D variable coefficients generalized shallow water wave equation. Nonlinear Dyn 111, 9741–9752 (2023). https://doi.org/10.1007/s11071-023-08356-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-023-08356-3
Keywords
- (3+1)-dimensional variable coefficients generalized shallow water wave equation
- Modified Hirota bilinear method
- Rogue wave solutions
- Breather solutions
- Interaction solutions