
Abstract
Ferromagnetic-material investigations are active, with the applications in direct-current power supplies, radios, televisions, high-frequency power supplies, microwave equipments, magnetic recorders, electrodes, sensors, ferrofluids, etc. In this paper, we investigate the Kraenkel–Manna–Merle system for the ultra-short waves in a saturated ferromagnetic material with the zero conductivity in the presence of an external field. N-fold Darboux transformation of that system is derived via an existing Lax pair, where N is a positive integer. Three- and four-fold solutions of that system are determined via \(N=3\) and \(N=4\) in our N-fold Darboux transformation. With respect to the magnetization and external magnetic field related to the saturated ferromagnetic material, interaction among the three solitons and interaction among the four solitons are graphically depicted, which may be useful in understanding certain nonlinear phenomena in the ferromagnetic materials.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Magnetism has been a subject of intense research [1, 2]. Only a few metallic elements, notably iron, cobalt, nickel and some rare earths, have exhibited the large-scale magnetic effects that result in the commercial materials [3, 4]. There has been certain enhancement on the atomic spin effect in alloys or oxides of some materials containing those elements and some neighboring ions [3, 5]. That enhancement has resulted from the cooperative interaction of a large number (\(10^{13}\)–\(10^{14}\)) of the atomic spins producing a region in which all the atomic spins within it are aligned parallel [3]. Those materials have been called ferromagnetic [3]. Ferromagnetic materials have piqued the interest of researchers due to their applications in the data processing [2, 3], storage [2, 3, 6, 7] and communication [2, 3].
To study certain nonlinear phenomena in optics [8], fluid mechanics [9], Bose–Einstein condensation [10], plasma physics [11], etc., nonlinear evolution equations have been developed. Recently, researchers have concentrated their efforts on some nonlinear evolution equations relevant to the ferromagnetic materials, such as the Lakshmanan–Porsezian–Daniel equation describing the nonlinear spin excitations in one-dimensional isotropic biquadratic Heisenberg ferromagnetic spin with the octupole-dipole interaction [12, 13], a nonlinear Schrödinger-type equation for the magnetization dynamics of a ferromagnetic thin film with the interfacial Dzyaloshinskii–Moriya interaction in the long-wave-length approximation [14], a variable-coefficient modified Kadomtsev–Petviashvili system for certain electromagnetic waves in an isotropic charge-free infinite ferromagnetic thin film with the potential application in magneto-optic recording [15]. Another example has been the Kraenkel–Manna–Merle system for the ultra-short waves in a saturated ferromagnetic material with the zero conductivity in the presence of an external field [16], i.e.,
from the Maxwell’s equations with the Landau–Lifshitz–Gilbert equation, where the vectors H and M stand for the dimensionless magnetic induction and magnetization density, respectively, the constants \(\rho \) and \(\kappa \) mean the dimensionless saturation magnetization and Gilbert-damping parameter, respectively, \(\nabla \) represents for the divergence of corresponding vector field and \(\tau \) denotes the normalized time variable.
Via a blend of the coordinate transformations and certain expansion series of the magnetization density and the magnetic induction [17], System (1) has been transformed into the following system [17,18,19,20,21,22,23,24,25,26,27,28,29,30,31]:
with the real differentiable functions \(u = u(x,t)\) and \(v = v(x,t)\) standing for the magnetization and the external magnetic field related to the saturated ferromagnetic material, respectively, the parameter \(\sigma \) denoting the damping effect, while the subscripts meaning the partial derivatives with respect to the space variable x and time variable t.
Solitons, one type of the nonlinear waves, have been studied in nonlinear optics [32,33,34], Bose–Einstein condensation [35], fluid mechanics [36, 37] and other fields [38,39,40,41,42]. Researchers’ interests have also been drawn to some other types of the nonlinear waves, including the breathers [43, 44], periodic waves [45, 46] and rouge waves [47]. The Darboux transformation (DT) has been proposed as a method for finding the soliton solutions [48, 49]. The ability to derive some multiple solitons without an iterative approach has been regarded as an advantage of the N-fold DT over the one-fold DT, where N is a positive integer [50, 51]. Other ways for solving the nonlinear evolution equations have been developed, such as the Hirota method [52,53,54,55,56], Riemann–Hilbert approach [57], Bäcklund transformation [58,59,60], similarity reduction [61, 62], Lie symmetry approach [63], Pfaffian technique [64] and so on.
For System (2), Ref. [18] has obtained the corresponding Lax pair as
under the damping effect coefficient \(\sigma =0\), where \(\Phi =(\phi _{1}, \phi _{2})^T\), \(\phi _{1}\) and \(\phi _{2}\) are the differentiable functions of x and t, spectral parameter \(\lambda \) is a constant, the superscript “T” means the transpose for a vector/matrix. System (2) has been reproduced through the compatibility condition \(M_t-R_x + MR -RM=0\) [18]. Contributions have been seen on System (2): bilinear forms [17]; DT and loop-like soliton excitations [19]; rogue-wave solutions [20, 21]; some soliton solutions [17, 18, 22,23,24,25,26,27]; some analytic solutions [28,29,30] and influence of the damping effects [31].
However, to our knowledge, N-fold DT of System (2) and some solitonic interactions which differ from those in Refs. [17,18,19, 22,23,24,25,26,27] have not been reported. In Sect. 2, we shall determine an N-fold DT of System (2) via Lax Pair (3). In Sect. 3, based on our N-fold DT, we shall derive the three-fold solutions of System (2) when \(N=3\), which can describe the interaction among the three solitons, and the four-fold solutions of System (2) when \(N=4\), which can describe the interaction among the four solitons. In Sect. 4, we shall discuss the solitonic interactions graphically. In Sect. 5, our conclusions will be given.
2 N-fold DT of System (2)
To derive an N-fold DT of System (2) by virtue of Lax Pair (3), we begin by introducing a gauge transformation
where D is a reversible matrix and \({\widetilde{\Phi }}\) is required to satisfy
while \({\widetilde{M}}\) and \({\widetilde{R}}\) have the same forms as M and R, respectively, except that the old potentials u, v have been replaced with new ones \({\widetilde{u}}\), \({\widetilde{v}}\), and the superscript “\(-1\)” represents the inverse of a matrix. We assume that the N-fold Darboux matrix D is in the form of a polynomial matrix of \(\lambda \) as follows:
where \(a^{(n)}\)’s and \(b^{(n)}\)’s are some to-be-determined functions of x and t. Supposing that \(\lambda _{\imath }\!\)’s (\(\lambda _{\imath } \ne 0\), \(\imath = 1, 2, \ldots , N \)) are the N roots of detD, we have
Thus, we are able to determine \(a_n^{(n)}\)’s and \(b_n^{(n)}\)’s uniquely via the following linear algebraic system:
where
and \(\varphi \left( \lambda \right) = \left( \varphi _{1} \left( \lambda \right) , \varphi _{2} \left( \lambda \right) \right) ^T\) is a solution of Lax Pair (3), while the N parameters \(\lambda _{\imath }\!\)’s (\(\lambda _{\imath } \ne \lambda _{\jmath }, \imath \ne \jmath \)) are suitably chosen so that the determinant of the coefficients for Eqs. (8) is nonzero.
Proposition 1
The matrix \({\widetilde{M}}\) defined via Eq. (5a) has the same form as M, i.e.,
where the transformations from the old potential functions u, v into the new ones \({\widetilde{u}}\), \({\widetilde{v}}\) are given by
with \(\theta \left( t \right) \) being a differentiable function of t.
Proof
Let \(D^{-1}=D^{*}/ \text {det} D\) and
where
and the superscript “\(*\)” denotes the adjoint of a matrix. Making use of Eqs. (3a), (8) and (9), we have
Following that, combining Eqs. (11) with (12) yields
which indicates that \( \lambda _{\imath }\!\)’s are the roots of \(k_{11} \left( \lambda \right) \), \(k_{12} \left( \lambda \right) \), \(k_{21} \left( \lambda \right) \) and \(k_{22} \left( \lambda \right) \).
It should be noted that \(k_{11} \left( \lambda \right) \), \(k_{12} \left( \lambda \right) \), \(k_{21} \left( \lambda \right) \) and \(k_{22} \left( \lambda \right) \) are all the polynomials of \(\lambda \) with order \(-2N+1\). With the help of Eq. (7), it can be verified that there exists a matrix P such that
where
while \(p_{11}^{(1)}\), \(p_{11}^{(0)}\), \(p_{12}^{(1)}\), \(p_{12}^{(0)}\), \(p_{21}^{(1)}\), \(p_{21}^{(0)}\), \(p_{22}^{(1)}\) and \(p_{22}^{(0)}\) are some to-be-determined functions of x and t. In order to determine P, we rewrite Eq. (14) as
Equating the same powers of \(\lambda \) in Eq. (15) leads to the following results:
From Eqs. (5a) and (16), we arrive at the conclusion that \(P={\widetilde{M}}\). The proof is completed.
Proposition 2
The matrix \({\widetilde{R}}\) defined via Eq. (5b) has the same form as R under Transformations (1), i.e.,
Proof
Let
where
By virtue of Eqs. (3b), (8) and (9), we have
Then, applying Eqs. (17) and (18), we can verify that \( \lambda _{\imath }\!\)’s are the roots of \(l_{11} \left( \lambda \right) \), \(l_{12} \left( \lambda \right) \), \(l_{21} \left( \lambda \right) \) and \(l_{22} \left( \lambda \right) \).
Noting that \(l_{11} \left( \lambda \right) \) and \(l_{22} \left( \lambda \right) \) are the polynomials of \(\lambda \) with order \(-2N-1\), whereas \(l_{12} \left( \lambda \right) \) and \(l_{21} \left( \lambda \right) \) are the polynomials of \(\lambda \) with order \(-2N\). With the help of Eq. (7), it can be verified that there exists a matrix Q such that
where
while \(q_{11}^{(1)}\), \(q_{11}^{(0)} \), \(q_{12}^{(0)}\), \(q_{21}^{(0)}\), \(q_{22}^{(1)}\) and \(q_{22}^{(0)}\) are some to-be-determined functions of x and t. In order to determine Q, we rewrite Eq. (19) as
Equating the same powers of \(\lambda \) in Eq. (20), we obtain the following results:
From Eqs. (5b) and (21), we can see that \(Q={\widetilde{R}}\). The proof is completed.
According to Propositions 1 and 2, Transformations (4) and (1) can transform Lax Pair (3) into Lax Pair (5). Further, we have the following theorem:
Theorem 1
Let u and v be the seed solutions of System (2), \(\varphi \left( \lambda \right) = \left( \varphi _{1} \left( \lambda \right) , \varphi _{2} \left( \lambda \right) \right) ^T\) be the solution of Lax Pair (3), then the N-Fold DT of System (2) is given by Transformation (4) and
where
\(\Delta a^{(N-1)}\) is produced from \(\Delta \) by replacing its Nth column with \((-\lambda _1^{-N}, -\lambda _2^{-N}, \ldots , -\lambda _N^{-N}, -\lambda _1^{-N} \delta _1, -\lambda _2^{-N} \delta _2, \ldots , -\lambda _N^{-N} \delta _N)^{T} \) and \(\Delta b^{(N-1)}\) is produced from \(\Delta \) by replacing its 2Nth column with \((-\lambda _1^{-N}, -\lambda _2^{-N}, \ldots , -\lambda _N^{-N}, -\lambda _1^{-N} \delta _1, -\lambda _2^{-N} \delta _2, \ldots , -\lambda _N^{-N} \delta _N)^{T} \).
3 Solitonic interactions of System (2)
To obtain some solutions featuring the interactions among the solitons of System (2), we first have to choose the suitable seed solutions. Taking the seed solutions of System (2) as \(u=0\), \(v= \alpha x +\beta (t) \), we derive the following solutions of Lax Pair (3):
where \(\alpha \) is a constant and \(\beta (t)\) is a differentiable function of t.
Then, utilizing Theorem 1, we give the three- and four-fold solutions of System (2) as follows:
(I) When \(N=3\), three-fold solutions of System (2) can be expressed as
where
(II) When \(N=4\), four-fold solutions of System (2) can be expressed as
where

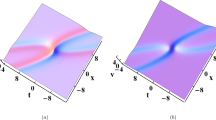
Interaction among the three solitons via Solutions (23) with \(\alpha =\frac{1}{10}\), \(\theta (t)=\text {sin} (\frac{1}{4}t)\), \(\lambda _1=-\frac{3}{2}\), \(\lambda _2=-1\) and \(\lambda _3=-2\)

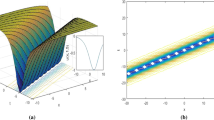
Interaction among the four solitons via Solutions (24) with \(\alpha =\frac{1}{10}\), \(\theta (t)=\text {cos} (\frac{1}{4}t)\), \(\lambda _1=-3\), \(\lambda _2=\frac{3}{2}\), \(\lambda _3=2\) and \(\lambda _4=-1\)
4 Discussions
With N-fold DT (4) and (1), we are able to give the N-fold solutions of System (2) via the determinants in Theorem 1. It should be pointed out that the DT constructed in Ref. [19] is a special case of our N-Fold DT (4) and (1) when \(N=1\) or 2. Interactions among the solitons of System (2) can be described via the N-fold solutions with certain parameters. Three-Fold Solutions (23) can describe the interaction among the three solitons with certain parameters, which is different from those in Refs. [17,18,19, 22,23,24,25,26,27]. With respect to u(x, t), the magnetization related to the saturated ferromagnetic material, Fig. 1a shows the interaction among the two bell-shape solitons and one anti-bell-shape soliton. With respect to v(x, t), the external magnetic field related to the saturated ferromagnetic material, Fig. 1b displays the interaction among the three kink-shape solitons. Those solitons interact with one another around \(t = 0\), and then move apart. Amplitudes, velocities and shapes of those solitons remain unchanged after the interaction, indicating that the interaction is elastic. Interaction among the four solitons can be described via Four-Fold Solutions (24) with certain parameters, which is different from those in Refs. [17,18,19, 22,23,24,25,26,27]. With respect to u(x, t), the magnetization related to the saturated ferromagnetic material, as shown in Fig. 2a, we can see the elastic interaction among the two bell-shape solitons and two anti-bell-shape solitons. With respect to v(x, t), the external magnetic field related to the saturated ferromagnetic material, elastic interaction among the four kink-shape solitons is exhibited in Fig. 2b. It can be observed that the amplitudes and shapes of those solitons change nonlinearly in the interaction region and then recover after the interaction.
5 Conclusions
Ferromagnetic-material investigations have been active, with the applications in direct-current power supplies, radios, televisions, high-frequency power supplies, microwave equipments, magnetic recorders, electrodes, sensors, ferrofluids, etc. As for the ultra-short waves in a saturated ferromagnetic material with the zero conductivity in the presence of an external field, with respect to u(x, t), the magnetization related to the saturated ferromagnetic material, and v(x, t), the external magnetic field related to the saturated ferromagnetic material, we have studied the Kraenkel–Manna–Merle system in this paper, i.e., System (2). With Lax Pair (3), we have constructed N-Fold DT (4) and (1) of System (2). By virtue of N-Fold DT (4) and (1) with \(N=3\) and 4, we have derived Three-Fold Solutions (23) and Four-Fold Solutions (24) of System (2), respectively. Via Three-Fold Solutions (23) and Four-Fold Solutions (24), we have given the solitonic interactions which are different from those in Refs. [17,18,19, 22,23,24,25,26,27]. Figure 1a shows the interaction among the two bell-shape solitons and one anti-bell-shape soliton, whereas Fig. 1b displays the interaction among the three kink-shape solitons. Figure 2a exhibits the interaction among the two bell-shape solitons and two anti-bell-shape solitons, and Fig. 2b shows the interaction among the four kink-shape solitons. As we have observed, those interactions are elastic.
Data availability
This paper has no associated data.
References
Vedmedenko, E.Y., Kawakami, R.K., Sheka, D.D., Gambardella, P., Kirilyuk, A., Hirohata, A., Binek, C., Chubykalo-Fesenko, O., Sanvito, S., Kirby, B.J., Grollier, J., Everschor-Sitte, K., Kampfrath, T., You, C.Y., Berger, A.: The 2020 magnetism roadmap. J. Phys. D: Appl. Phys. 53, 453001 (2020)
Barman, A., Sinha, J.: Spin Dynamics and Damping in Ferromagnetic Thin Films and Nanostructures. Springer, Cham (2018)
Goldman, A.: Modern Ferrite Technology. Springer, New York (1993)
Shi, P.: One-dimensional magneto-mechanical model for an hysteretic magnetization and magnetostriction in ferromagnetic materials. J. Magn. Magn. Mater. 537, 168212 (2021)
Davidson, A., Amin, V.P., Aljuaid, W.S., Haney, P.M., Fan, X.: Perspectives of electrically generated spin currents in ferromagnetic materials. Phys. Lett. A 384, 126228 (2020)
Walter, J., Voigt, B., Day-Roberts, E., Heltemes, K., Fernandes, R.M., Birol, T., Leighton, C.: Voltage-induced ferromagnetism in a diamagnet. Sci. Adv. 6, eabb7721 (2020)
Nevirkovets, I.P., Mukhanov, O.A.: Memory cell for high-density arrays based on a multiterminal superconducting-ferromagnetic device. Phys. Rev. Appl. 10, 034013 (2018)
Ermolaev, A.V., Sheveleva, A., Genty, G., Finot, C., Dudley, J.M.: Data-driven model discovery of ideal four-wave mixing in nonlinear fibre optics. Sci. Rep. 12, 12711 (2022)
Wazwaz, A.M.: Integrable (3+1)-dimensional Ito equation: variety of lump solutions and multiple-soliton solutions. Nonlinear Dyn. 109, 1929 (2022)
Katsimiga, G.C., Mistakidis, S.I., Schmelcher, P., Kevrekidis, P.G.: Phase diagram, stability and magnetic properties of nonlinear excitations in spinor Bose-Einstein condensates. New J. Phys. 23, 013015 (2021)
Kumar, S., Mohan, B., Kumar, R.: Lump, soliton, and interaction solutions to a generalized two-mode higher-order nonlinear evolution equation in plasma physics. Nonlinear Dyn. 110, 693 (2022)
Lakshmanan, M., Porsezian, K., Daniel, M.: Effect of discreteness on the continuum limit of the Heisenberg spin chain. Phys. Lett. A 133, 483 (1988)
Sun, W.R.: Vector solitons and rogue waves of the matrix Lakshmanan-Porsezian-Daniel equation. Nonlinear Dyn. 102, 1743 (2020)
Deng, Z.H., Wu, T., Tang, B., Wang, X.Y., Zhao, H.P., Deng, K.: Breathers and rogue waves in a ferromagnetic thin film with the Dzyaloshinskii-Moriya interaction. Eur. Phys. J. Plus 133, 450 (2018)
Gao, X.Y., Guo, Y.J., Shan, W.R., Yin, H.M., Du, X.X., Yang, D.Y.: Certain electromagnetic waves in a ferromagnetic film. Commun. Nonlinear Sci. Numer. Simul. 105, 106066 (2022)
Kraenkel, R.A., Manna, M.A., Merle, V.: Nonlinear short-wave propagation in ferrites. Phys. Rev. E 61, 976 (2000)
Nguepjouo, F.T., Kuetche, V.K., Kofane, T.C.: Soliton interactions between multivalued localized waveguide channels within ferrites. Phys. Rev. E 89, 063201 (2014)
Tchokouansi, H.T., Kuetche, V.K., Kofane, T.C.: On the propagation of solitons in ferrites: the inverse scattering approach. Chaos Solitons Fract. 86, 64 (2016)
Ma, Y.L., Li, B.Q.: Kraenkel-Manna-Merle saturated ferromagnetic system: Darboux transformation and loop-like soliton excitations. Chaos Solitons Fract. 159, 112179 (2022)
Jin, X.W., Lin, J.: Rogue wave, interaction solutions to the KMM system. J. Magn. Magn. Mater. 502, 166590 (2020)
Li, B.Q., Ma, Y.L.: Oscillation rogue waves for the Kraenkel-Manna-Merle system in ferrites. J. Magn. Magn. Mater. 537, 168182 (2021)
Li, B.Q., Ma, Y.L.: Rich soliton structures for the Kraenkel-Manna-Merle (KMM) system in ferromagnetic materials. J. Supercond. Nov. Magn. 31, 1773 (2018)
Younas, U., Sulaiman, T.A., Yusuf, A., Bilal, M., Younis, M., Rehman, S.U.: New solitons and other solutions in saturated ferromagnetic materials modeled by Kraenkel-Manna-Merle system. Indian J. Phys. 96, 181 (2021)
Rehman, S.U., Bilal, M., Ahmad, J.: Dynamics of soliton solutions in saturated ferromagnetic materials by a novel mathematical method. J. Magn. Magn. Mater. 538, 168245 (2021)
Tchokouansi, H.T., Tchidjo, R.T., Felenou, E.T., Kuetche, V.K.: Propagation of magnetic solitary waves in inhomogeneous ferrites, subjected to damping effects. J. Magn. Magn. Mater. 554, 169281 (2022)
Si, H.L., Li, B.Q.: Two types of soliton twining behaviors for the Kraenkel-Manna-Merle system in saturated ferromagnetic materials. Optik 166, 49 (2018)
Li, B.Q., Ma, Y.L., Sathishkumar, P.: The oscillating solitons for a coupled nonlinear system in nanoscale saturated ferromagnetic materials. J. Magn. Magn. Mater. 474, 661 (2019)
Younas, U., Bilal, M., Ren, J.: Diversity of exact solutions and solitary waves with the influence of damping effect in ferrites materials. J. Magn. Magn. Mater. 549, 168995 (2022)
Tchokouansi, H.T., Felenou, E.T., Tchidjo, R.T., Kuetche, V.K., Bouetou, T.B.: Traveling magnetic wave motion in ferrites: impact of inhomogeneous exchange effects. Chaos Solitons Fract. 121, 1 (2019)
Li, B.Q., Ma, Y.L.: Loop-like periodic waves and solitons to the Kraenkel-Manna-Merle system in ferrites. J. Electromagn. Wave. Appl. 32, 1275 (2018)
Tchidjo, R.T., Tchokouansi, H.T., Felenou, E.T., Kuetche, V.K., Bouetou, T.B.: Influence of damping effects on the propagation of magnetic waves in ferrites. Chaos Solitons Fract. 119, 203 (2019)
Randoux, S., Suret, P., Chabchoub, A., Kibler, B., El, G.: Nonlinear spectral analysis of Peregrine solitons observed in optics and in hydrodynamic experiments. Phys. Rev. E 98, 022219 (2018)
Yang, D.Y., Tian, B., Qu, Q.X., Zhang, C.R., Chen, S.S., Wei, C.C.: Lax pair, conservation laws, Darboux transformation and localized waves of a variable-coefficient coupled Hirota system in an inhomogeneous optical fiber. Chaos Solitons Fract. 150, 110487 (2021)
Wu, X.H., Gao, Y.T., Yu, X., Ding, C.C., Liu, F.Y., Jia, T.T.: Darboux transformation, bright and dark-bright solitons of an \(N\)-coupled high-order nonlinear Schrödinger system in an optical fiber. Mod. Phys. Lett. B 36, 2150568 (2022)
Kengne, E., Liu, W.M., Malomed, B.A.: Spatiotemporal engineering of matter-wave solitons in Bose-Einstein condensates. Phys. Rep. 899, 1 (2021)
Kumar, S., Mohan, B.: A study of multi-soliton solutions, breather, lumps, and their interactions for Kadomtsev-Petviashvili equation with variable time coefficient using Hirota method. Phys. Scr. 96, 125255 (2021)
Redor, I., Barthélemy, E., Michallet, H., Onorato, M., Mordant, N.: Experimental evidence of a hydrodynamic soliton gas. Phys. Rev. Lett. 122, 214502 (2019)
Gao, X.Y., Guo, Y.J., Shan, W.R.: Taking into consideration an extended coupled (2+1)-dimensional Burgers system in oceanography, acoustics and hydrodynamics. Chaos Solitons Fract. 161, 112293 (2022)
Yang, D.Y., Tian, B., Qu, Q.X., Du, X.X., Hu, C.C., Jiang, Y., Shan, W.R.: Lax pair, solitons, breathers and modulation instability of a three-component coupled derivative nonlinear Schrödinger system for a plasma. Eur. Phys. J. Plus 137, 189 (2022)
Kumar, S., Kumar, A., Mohan, B.: Evolutionary dynamics of solitary wave profiles and abundant analytical solutions to a (3+1)-dimensional burgers system in ocean physics and hydrodynamics. J. Ocean Eng. Sci. (2022). https://doi.org/10.1016/j.joes.2021.11.002
Zhou, T.Y., Tian, B., Zhang, C.R., Liu, S.H.: Auto-Bäcklund transformations, bilinear forms, multiple-soliton, quasi-soliton and hybrid solutions of a (3+1)-dimensional modified Korteweg-de Vries-Zakharov-Kuznetsov equation in an electron-positron plasma. Eur. Phys. J. Plus 137, 912 (2022)
Wu, X.H., Gao, Y.T., Yu, X., Ding, C.C., Li, L.Q.: Modified generalized Darboux transformation and solitons for a Lakshmanan-Porsezian-Daniel equation. Chaos Solitons Fract. 162, 112399 (2022)
Wang, M., Tian, B., Zhou, T.Y.: Darboux transformation, generalized Darboux transformation and vector breathers for a matrix Lakshmanan-Porsezian-Daniel equation in a Heisenberg ferromagnetic spin chain. Chaos Solitons Fract. 152, 111411 (2021)
Zhou, T.Y., Tian, B., Chen, Y.Q., Shen, Y.: Painlevé analysis, auto-Bäcklund transformation and analytic solutions of a (2+1)-dimensional generalized Burgers system with the variable coefficients in a fluid. Nonlinear Dyn. 108, 2417 (2022)
Liu, F.Y., Gao, Y.T., Yu, X., Ding, C.C.: Wronskian, Gramian, Pfaffian and periodic-wave solutions for a (3+1)-dimensional generalized nonlinear evolution equation arising in the shallow water waves. Nonlinear Dyn. 108, 1599 (2022)
Shen, Y., Tian, B., Liu, S.H., Zhou, T.Y.: Studies on certain bilinear form, \(N\)-soliton, higher-order breather, periodic-wave and hybrid solutions to a (3+1)-dimensional shallow water wave equation with time-dependent coefficients. Nonlinear Dyn. 108, 2447 (2022)
Yang, D.Y., Tian, B., Wang, M., Zhao, X., Shan, W.R., Jiang, Y.: Lax pair, Darboux transformation, breathers and rogue waves of an \(N\)-coupled nonautonomous nonlinear Schrödinger system for an optical fiber or a plasma. Nonlinear Dyn. 107, 2657 (2022)
Wu, X.H., Gao, Y.T., Yu, X., Ding, C.C., Hu, L., Li, L.Q.: Binary Darboux transformation, solitons, periodic waves and modulation instability for a nonlocal Lakshmanan-Porsezian-Daniel equation. Wave Motion 114, 103036 (2022)
Yang, D.Y., Tian, B., Tian, H.Y., Wei, C.C., Shan, W.R., Jiang, Y.: Darboux transformation, localized waves and conservation laws for an \(M\)-coupled variable-coefficient nonlinear Schrödinger system in an inhomogeneous optical fiber. Chaos Solitons Fract. 156, 111719 (2022)
Fan, F.C., Shi, S.Y., Xu, Z.G.: Positive and negative integrable lattice hierarchies: conservation laws and \(N\)-fold Darboux transformations. Commun. Nonlinear Sci. Numer. Simul. 91, 105453 (2020)
Shen, Y., Tian, B., Zhou, T.Y., Gao, X.T.: Nonlinear differential-difference hierarchy relevant to the Ablowitz-Ladik equation: Lax pair, conservation laws, \(N\)-fold Darboux transformation and explicit exact solutions. Chaos Solitons Fract. 164, 112460 (2022)
Kumar, S., Mohan, B., Kumar, A.: Generalized fifth-order nonlinear evolution equation for the Sawada–Kotera, Lax, and Caudrey–Dodd–Gibbon equations in plasma physics: Painlevé analysis and multi-soliton solutions. Phys. Scr. 97, 035201 (2022)
Kumar, S., Mohan, B.: A novel and efficient method for obtaining Hirota’s bilinear form for the nonlinear evolution equation in (n+1) dimensions. Partial Differ. Equ. Appl. Math. 5, 100274 (2022)
Gao, X.T., Tian, B., Feng, C.H.: In oceanography, acoustics and hydrodynamics: investigations on an extended coupled (2+1)-dimensional Burgers system. Chin. J. Phys. 77, 2818 (2022)
Gao, X.Y., Guo, Y.J., Shan, W.R.: Bilinear auto-Bäcklund transformations and similarity reductions for a (3+1)-dimensional generalized Yu–Toda–Sasa–Fukuyama system in fluid mechanics and lattice dynamics. Qual. Theory Dyn. Syst. 21, 95 (2022)
Gao, X.T., Tian, B., Shen, Y., Feng, C.H.: Considering the shallow water of a wide channel or an open sea through a generalized (2+1)-dimensional dispersive long-wave system. Qual. Theory Dyn. Syst. 21, 104 (2022)
Yang, Y.L., Fan, E.G.: Riemann-Hilbert approach to the modified nonlinear Schrödinger equation with non-vanishing asymptotic boundary conditions. Phys. D 417, 132811 (2021)
Gao, X.Y., Guo, Y.J., Shan, W.R.: Optical waves/modes in a multicomponent inhomogeneous optical fiber via a three-coupled variable-coefficient nonlinear Schrödinger system. Appl. Math. Lett. 120, 107161 (2021)
Zhou, T.Y., Tian, B., Chen, S.S., Wei, C.C., Chen, Y.Q.: Bäcklund transformations, Lax pair and solutions of a Sharma–Tasso–Olver–Burgers equation for the nonlinear dispersive waves. Mod. Phys. Lett. B 35, 2150421 (2021)
Zhou, T.Y., Tian, B.: Auto-Bäcklund transformations, Lax pair, bilinear forms and bright solitons for an extended (3+1)-dimensional nonlinear Schrödinger equation in an optical fiber. Appl. Math. Lett. 133, 108280 (2022)
Gao, X.Y., Guo, Y.J., Shan, W.R.: Auto-Bäcklund transformation, similarity reductions and solitons of an extended (2+1)-dimensional coupled Burgers system in fluid mechanics. Qual. Theory Dyn. Syst. 21, 60 (2022)
Gao, X.T., Tian, B.: Water-wave studies on a (2+1)-dimensional generalized variable-coefficient Boiti-Leon-Pempinelli system. Appl. Math. Lett. 128, 107858 (2022)
Liu, F.Y., Gao, Y.T.: Lie group analysis for a higher-order Boussinesq-Burgers system. Appl. Math. Lett. 132, 108094 (2022)
Liu, F.Y., Gao, Y.T., Yu, X., Hu, L., Wu, X.H.: Hybrid solutions for the (2+1)-dimensional variable-coefficient Caudrey-Dodd-Gibbon-Kotera-Sawada equation in fluid mechanics. Chaos Solitons Fract. 152, 111355 (2021)
Funding
We express our sincere thanks to the Editors and Reviewers for their valuable comments. This work has been supported by the BUPT Excellent Ph.D. Students Foundation (No. CX2022156), by the National Natural Science Foundation of China under Grant Nos. 11772017, 11272023 and 11471050, by the Fund of State Key Laboratory of Information Photonics and Optical Communications (Beijing University of Posts and Telecommunications), China (IPOC: 2017ZZ05) and by the Fundamental Research Funds for the Central Universities of China under Grant No. 2011BUPTYB02.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Shen, Y., Tian, B., Zhou, TY. et al. N-fold Darboux transformation and solitonic interactions for the Kraenkel–Manna–Merle system in a saturated ferromagnetic material. Nonlinear Dyn 111, 2641–2649 (2023). https://doi.org/10.1007/s11071-022-07959-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-07959-6