
Abstract
To analyse novel coronavirus disease (COVID-19) transmission in India, this article provides an extended SEIR multicompartment model using vaccination as a control parameter. The model considers eight classes of infection: susceptible (\(\mathcal {S}\)), vaccinated (\(\mathcal {V}\)), exposed (\(\mathcal {E}\)), asymptomatic infected (\(\mathcal {A}\)), symptomatic infected (\(\mathcal {I}\)), isolated (\(\mathcal {J}\)), hospitalised (\(\mathcal {H}\)), recovered (\(\mathcal {R}\)). To begin, a mathematical study is performed to demonstrate the suggested model’s uniform boundedness, epidemic equilibrium, and basic reproduction number. The findings indicate that if, \(R_{0}<1\), the disease-free equilibrium is locally asymptotically stable; but, if, \(R_{0}>1\) the equilibrium is unstable. Secondly, we examine the effect on those who have received vaccinations with what are deemed optimal values. The suggested model is numerically simulated using MATLAB 14.0, and the results confirm the capacity of the proposed model to provide an accurate forecast of the progress of the epidemic in India. Finally, we examine the impact of immunisation on COVID-19 dissemination.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The world is currently grappling with a novel infectious disease, coronavirus disease. In February 2020, the World Health Organization (WHO) termed this disease COVID-19 [1]. The disease initially manifested itself in December 2019 at the Huanan seafood market in Wuhan, Hubei, China. Nowadays, the number of affected people is growing daily. COVID-19 was declared a global pandemic by the WHO on March 11, 2020 [2]. As of September 17, 2021, about 226 million confirmed cases of COVID-19 had been reported to WHO, including over 4 million deaths [3]. India’s first reported COVID-19 case occurred in Kerala on January 30, 2020, when a 20-year-old lady returned to India from Wuhan, China [4]. As of September 17, 2021, about 33 million confirmed cases of COVID-19 had been detected in India, with over 444 thousand deaths reported to the WHO [5].
Individuals spread COVID-19 through their respiratory droplets after coming into contact with contaminated objects or sick individuals. Social separation is used to keep people apart and to put an end to overcrowded social events. The symptoms of all coronavirus patients are identical, including respiratory difficulties, fever, and a dry cough. Numerous shops, supermarkets, department stores, and public areas were closed to prevent individuals from encountering one another, and various countries implemented lockdown procedures to limit the spread of the disease. During the COVID-19 pandemic, some countries employed non-pharmaceutical interventions (NPIs) such as mask use, social isolation, and appropriate sanitation to help prevent the virus spread. This process contributes to the slowing but not a complete cessation of the spread. However, vaccination is being initiated in order to combat COVID-19.
Mathematical models are researched to better understand infectious disease behaviour and to forecast transmission dynamics for the purpose of regulating and planning measures [6,7,8]. Numerous model-based studies have effectively captured the worldwide dynamics of the corresponding infectious illness throughout the history of literature [9,10,11,12,13,14,15,16]. Significant research has been conducted or is currently being conducted to uncover COVID-19 using appropriate mathematical models. Ndairou et al. [17] proposed a compartmental mathematical model for the spread of the COVID-19 disease, focusing on the transmissibility of super-spreaders among individuals. Mandal et al. [18] develop a mathematical model wherein they include a quarantine class and government intervention methods to help minimise disease spread. In a separate recent study, Prathumwan et al. [19] developed a mathematical model for projecting the COVID-19 outbreak’s propagation in order to explore the impacts of quarantined, hospitalised, and latent class people. Using a deterministic compartmental model, Biswas et al. [20] investigated the propagation of COVID-19 and determined model parameters using data from an active epidemic in India. In their work, Gumel et al. [21] demonstrate how several main non-pharmaceutical COVID-19 therapies might be included in the epidemic model. Additionally, a short summary of different models used to explore the dynamics of COVID-19 is given, covering agent-based, network, and statistical models. In another recent work, Ghostine et al. [22] have proposed an enhanced SEIR model including a vaccination compartment to mimic the spread of a new coronavirus epidemic in Saudi Arabia. Das et al. [23] developed a mathematical model including comorbidity in order to investigate the transmission dynamics of COVID-19.
Das et al. [24] proposed and explored a mathematical framework to study the transmission dynamics of COVID-19 with comorbidity. Yu et al. [25] proposed compartmental model to study the development of COVID-19 in India after relaxing control. Hu et al. [26] assessed the controllability of spread of COVID-19 in different stages based on proposed compartmental model.
Due to the fact that the nature and destruction of COVID-19 are dependent on a variety of system parameters (such as personal immunity, history of travel to a COVID-19 pandemic country, and maintaining the required hygiene), we cannot use a single model to describe the entire disease system worldwide. While adding richness and complexity to models might improve their accuracy, it also complicates their mathematics. To combat COVID-19 as a pandemic, appropriate immunisation efforts utilising NPIs must be developed. To accomplish this, coupled fundamental tactics are unavoidably necessary under optimal control strategies to eradicate COVID-19 as an infectious disease at the lowest possible cost of vaccination. The primary objective of this effort is to determine the optimal control strategy for COVID-19 infection using NPIs and vaccination. Consideration of asymptomatic infected, symptomatic infected, and vaccination classes in the proposed compartmental model requires an extensive investigation of disease-free equilibrium points. We have assumed the model parameters and evaluated the adequate reproduction number. We have done model fitting, parameter estimation, and validation of the model.
The following sections comprise the manuscript for this article: Sect. 2 introduces the model formulation. Section 3 conducts a qualitative study of the model. We examine the positivity and boundedness of solutions in Sect. 3.1, we study the positivity and boundedness of solutions. We compute the disease-free equilibrium \(E_{0}\), in Sect. 3.2. Following that, in Sect. 3.3, we also compute the basic reproduction number \(R_{0}\) of the COVID-19 system model. In Sect. 3.4, we examine the local stability of the disease-free equilibrium in terms of \(R_{0}\). Sect. 4 formulates and solves an optimal control problem analytically. Section 5 illustrates the model’s utility through numerical simulation; Sect. 5.1 illustrates the fixed control parameter. Section 5.2 discusses the sensitivity of the reproduction number, \(R_{0}\), to the parameters of the model system. In Sect. 5.3, we discussed the bifurcation diagram. The numerical simulation of the optimal control problem is shown in Sect. 5.4. Parameter-estimation, model fitting and model validation is discussed in Sect. 5.5. The conclusion concludes with Sect. 6.

Pictorial scenario of model (1). The flowchart shows the interaction of different stages of individuals in the model: susceptible (\(\mathcal {S}\)), vaccinated (\(\mathcal {V}\)), exposed (\(\mathcal {E}\)), asymptomatic infected (\(\mathcal {A}\)), symptomatic infected (\(\mathcal {I}\)), isolated (\(\mathcal {J}\)), hospitalised (\(\mathcal {H}\)), recovered (\(\mathcal {R}\))
2 The proposed mathematical model
In this section, we shall study the transmission mechanism of COVID-19 using a deterministic compartmental model. To formulate the mathematics model, we have divided the total population \(\mathcal {X}(t)\) into eight mutually exclusive compartments based on their disease status namely: susceptible \(\mathcal {S}(t)\), vaccinated \(\mathcal {V}(t)\), exposed \(\mathcal {E}(t)\), asymptomatic infected \(\mathcal {A}(t)\), symptomatic infected \(\mathcal {I}(t)\), isolated \(\mathcal {J}(t)\), hospitalised \(\mathcal {H}(t)\) and recovered \(\mathcal {R}(t)\).
Some of the classes are discussed in more detail here. In the exposed class \(\mathcal {E}(t)\), we consider those individuals of the susceptible and vaccinated classes who have had sufficient interaction with the infected individuals or contaminated surfaces or objects. There is an incubation period and a latency period. The incubation period is the period between exposure and the onset of clinical symptoms. The latent period is the period between exposure and communicability, which may be shorter or longer than the incubation period. In COVID-19, the latent period is shorter than the incubation period [27]. This fact leads us to make another two classes from the exposed class, namely asymptomatic infected \(\mathcal {A}(t)\) and symptomatic infected \(\mathcal {I}(t)\). Asymptomatic infected class \(\mathcal {A}(t)\) contains those individuals of the exposed class who lie between the latent period and the incubation period, and symptomatic infected class \(\mathcal {I}(t)\), contains those individuals of the exposed class who lie between the incubation period and infection period.
The mixing of individual hosts is homogeneous, and thus the law of the mass action holds. The rate of transfer from a compartment is in proportion to the population size of the compartment. There is no loss of immunity and no possibility of reinfection. Our model assumes that vaccinated individuals have to be separated into a vaccinated class \(\mathcal {V}(t)\). \(\varPi \) is the birth/recruitment rate into the population, \(\mu \) is the per capita natural death rate, \(\beta \) is the per capita transmission rate, \(\alpha \) is the constant of vaccination, \( \xi \) is the transfer rate of vaccinated individuals to get exposed or called vaccine inefficacy,\( \epsilon \) is the transfer rate of exposed individuals to asymptomatic infected, \( \delta \) is the transfer rate of exposed individuals to symptomatic infected, \( \theta \) is the rate of asymptomatic infected individuals to become isolated, \( \lambda \) is the rate of symptomatic infected individuals become hospitalised. \( \eta _{a},\eta _{i} \) and \( \eta _{j} \) are the disease-induced death rates of asymptomatic infected, symptomatic infected, and isolated infected, respectively, and \( \rho _{a} ,\rho _{i} ,\rho _{j} \) and \( \rho _{h} \) are the recovery rates of asymptomatic infected, symptomatic infected, isolated infected, and hospitalised individuals, respectively.
We provide in Fig. 1 the flow diagram of the COVID-19 transmission model under the aforementioned assumptions, which illustrates the many interactions between classes. The inward and outward arrows indicate the population increasing and decreasing, accordingly.
According to the conditions outlined above and the flow diagram (Fig. 1), the transmission of the virus is governed by the following system of ODEs:
The initial condition of system (1) is \( \mathcal {S}(0)\ge 0, \mathcal {V}(0)\ge 0, \mathcal {E}(0)\ge 0, \mathcal {A}(0)\ge 0, \mathcal {I}(0)\ge 0, \mathcal {J}(0)\ge 0, \mathcal {H}(0)\ge 0, \) and \( \mathcal {R}(0)\ge 0 \). The description of the state variables, control variables, and parameters used in the model with values is provided in Table 1.
3 Analysis of the model for fixed control
In this section, we analyse the model for fixed control, i.e. u(t) must be constant. Therefore, \( \alpha u \) is also constant, so without loss of generality, we replace \(\alpha u \) with another constant \(\alpha \) and carry out the analysis part.
3.1 Positivity and boundedness of solutions
Theorem 1
The solutions of system (1) are nonnegative and uniformly bounded.
Proof
We assume that
Now for \( t \rightarrow \infty \)
Hence, all the solution system (1) that are initiating in \( \{ \mathbb {R}_+^8 \} \) are confined in the region
for any \( \epsilon > 0 \) and \(t \rightarrow \infty \).\(\square \)
3.2 The disease-free equilibrium \( E_{0} \)
The disease-free equilibrium \( E_{0} \) of system (1) is obtained by setting all derivatives to 0 with \( \mathcal {A}=0 \) and \(\mathcal {I}=0\) and solving all variables, that yields to:
3.3 The basic reproduction number \( R_{0} \)
The basic reproduction number \(R_{0} \) is the most crucial epidemiological parameter for determining the nature of the disease. It is used to measure the transmission potential of an infectious disease. Additionally, it is essential for disease management and transmission. In epidemiology, the basic reproduction number, \( R_{0} \), (sometimes called the basic reproduction ratio or basic reproductive rate), is the average number of new infections caused by a single infected individual at the time t in the susceptible populations. Van den Driessche and Watmough [28] proposed a method for determining the basic reproduction number, named the next-generation matrix method. By employing the next-generation matrix approach, we determine the basic reproduction number. \( \mathcal {E},\, \mathcal {A}, \, \mathcal {I},\, \mathcal {J}\, \text {and}\, \mathcal {H} \) are the classes that are directly engaged in disease transmission. Therefore, from system (1), we have
Hence, we decompose the right-hand side of system (3) as \( \mathfrak {F}-\mathfrak {V} \), where
The Jacobian matrices of \( \mathfrak {F} \) and \( \mathfrak {V} \) are given by \( \mathbf {F} \) and \( \mathbf {V} \), respectively.
and
for \( x_{j}=\mathcal {E}, \mathcal {A}, \mathcal {I}, \mathcal {J}, \text{ and } \mathcal {H}. \) Or
where, \( c_1=\epsilon +\delta +d, c_2=\theta +\eta _{a}+d+\rho _{a}, c_3=\kappa +\lambda +\eta _{i}+d+\rho _{i}, c_4=\mu +\rho _{j}+\eta _{j}+d, c_5=\rho _{h}+d, \text{ and } c=\frac{\beta \varPi (\xi \alpha +d)}{d(\alpha +d)}. \)
Because the basic reproduction number is equal to the spectral radius of the matrix \( \varvec{\tilde{F}}{\varvec{\tilde{V}}^{-1}} \). As a result, we know that the basic reproduction number for the model under consideration is
3.4 Stability analysis of the disease-free equilibrium
In this section, we study the stability analysis of the disease-free equilibrium point \( E_{0} = \left( \frac{\varPi }{\alpha +d}, \frac{\varPi \alpha }{d(\alpha +d)}, 0,\right. \) \(\left. 0, 0, 0, 0, 0\right) \) whose stability has been investigated in the next theorem.
Theorem 2
If \( R_{0}<1 \), then the DFE \( E_{0} \) is locally asymptotically stable, and it is unstable if \( R_{0}>1 \).
Proof
The Jacobian matrix corresponding to system 1 at DFE \( E_{0} \left( \frac{\varPi }{\alpha +d}, \frac{\varPi \alpha }{d(\alpha +d)}, 0, 0, 0, 0, 0, 0\right) \) is given as
this can also be written as
Now, the eigenvalues of the above matrix are the roots of the following characteristic equation:
where \( a_1=c_1+c_2+c_3, \, a_2= c_1 c_2+ c_2 c_3+ c_3c_1-\epsilon c-c\delta ,\, a_3=c_1c_2c_3(1-R_0). \)
Following that, using the Liénard-Chipart test, we may determine whether all the roots of the characteristic equation are negative or have a negative real part if and only if the following conditions are met:
To verify the conditions of the Lienard–Chipard test. We rewrite the coefficients \( a_1, a_2, \text{ and } a_3 \) of the characteristic polynomial in terms of the basic reproduction number \( R_0 \) given by ( 4).
Additionally, we compute the following expression in terms of \( R_0 \):
As a result of the preceding expressions, it is obvious that if, \( R_{0}<1 \), , the second criterion of the Lienard–Chipard test is satisfied, and the disease-free equilibrium is asymptotically stable. When, \( R_{0}>1 \), we deduce that at least one eigenvalue is positive using Descartes’ rule of signs.\(\square \)
The epidemiological implication of Theorem 1 is that a tiny intake of COVID-19-infected individuals will not result in a community outbreak if \( R_{0}<1 \). That is, the disease rapidly dies out (when \( R_{0}<1 \)) if the initial number of infected individuals is in the basin of attraction of the continuum of the DFE \( (E_{0}) \).
4 The optimal control problem
Control strategies are crucial in reducing COVID-19 transmission. It is necessary to develop a strategy that minimises both the number of affected individuals and associated costs. In this aspect, optimal control theory is an extremely useful tool for determining such a policy. Now, we are concentrating on the most effective techniques for combining non-pharmaceutical treatments with the vaccination process in India. The optimal problem is given by introducing time-varying control u(t) , representing a fraction of the vaccination process. The objective functional is constructed as follows:
subject to the proposed model (1). The parameters \( b_1 , \, b_2 , \, \text{ and } \,b_3>0 \) corresponds to the weight constraints for the asymptomatic infected, symptomatic infected, and vaccination, respectively. By using the standard results, we can show that an optimal state exists. Now, we need to find out the value of the optimal control \( u^* (t) \) such that
where \( \varOmega =\{u\mid 0\le u\le 1, \text{ Lebesgue } \text{ integral }\}. \)
Here, we use the Pontryagin’s maximum principle to derive the necessary conditions for our optimal and corresponding states. The Lagrangian is given by
The Hamiltonian is defined as follows
Or
For the optimal control \( u^* (t) \), there exits adjoint variables corresponding to the states variables \( \mathcal {S},\, \mathcal {V},\, \mathcal {E},\) \( \mathcal {A},\, \mathcal {I},\, \mathcal {J},\, \mathcal {H},\, \text{ and } \,\mathcal {R} \).
where the adjoint variables satisfy the transversality conditions \( \lambda _{1}(t_{f})=0,\, \lambda _{2}(t_{f})=0, \, \lambda _{3}(t_{f})=0, \, \lambda _{4}(t_{f})=0, \, \lambda _{5}(t_{f})=0, \, \lambda _{6}(t_{f})=0,\, \lambda _{7}(t_{f})=0, \, \lambda _{8}(t_{f})=0 \).
We minimise the Hamiltonian concerning the control variable \(u^* (t)\).
5 Numerical simulation
5.1 Fixed control
We consider two cases: one with regular vaccination and the other with optimal vaccination control. First, we consider regular vaccination. To simulate our numerical results, we set the parameters for the system (1) that are given in Table 1.
Using the parameters given in Table 1, we calculate the disease-free equilibrium \( E_{0}\) = (49.50, 200.49, 0, 0, 0, 0, 0, 0) and the basic reproduction number \( R_{0}= 0.9104 \) from equations (2) and (3), respectively. This shows that the system is locally asymptotic stable, and the epidemic outbreak could be controlled. Using these values of parameters and the initial condition as \( \mathcal {S}(0)=500,\, \mathcal {V}(0)=10,\, \mathcal {E}(0)=10,\, \mathcal {A}(0)=1,\, \mathcal {I}(0)=1,\, \mathcal {J}(0)=5,\, \mathcal {H}(0)=0 \), and \( \mathcal {R}(0)=0 \), we solve our model numerically.
Figure 2 represents that when the basic reproduction number \( R_{0}<1 \), the system (1) converges to the disease-free equilibrium. Next, when we change the value of u from 0.9 to 0.5, the becomes \( R_{0}=1.3902>1 \), and Fig. 3 shows the variations in all the states of the system (1) when \( R_{0} \) is greater than unity.

Simulation results of model (1). The solution trajectory tends towards the disease-free equilibrium (DFE) when \(R_{0}<1\)

Simulation results of model (1), when \( R_{0}>1\)
5.2 Sensitivity analysis
Sensitivity analysis for the basic reproduction number, \( R_{0} \), tells us, how each parameter involved in the expression of \( R_{0} \) is essential in disease transmission. It is used to determine which parameter has a high impact and which has a low impact on the threshold \( R_{0} \). Moreover, it has an impact on the dynamics of the proposed model. Sensitivity indices tell us the relative change in the \( R_{0} \) when a parameter is changed. For performing the sensitivity analysis on \( R_{0} \) we used the normalised forward sensitivity index of \( R_{0} \), concerning the parameters in the expression of \( R_{0} \), which is defined as the relative change in the variable for the relative change in its parameters. If the variable is differential for a parameter, then its sensitivity indices are defined as follows.
Definition 1
The normalised forward sensitivity index of a function, \( F(x_{1}, x_{2}, ..., x_{n}) \) for \( x_{i}(1\le i\le n) \), is defined by \( \varGamma ^{F}_{x_{i}}=\frac{\partial F}{\partial x_{i}}\times \frac{x_{i}}{F} \) .
Therefore, the normalised forward sensitivity index of \( R_0 \) for a given parameter \(\theta \) is given by \( \varGamma _{\theta }^{R_{0}}=\frac{\partial R_{0}}{\partial \theta }\times \frac{\theta }{R_{0}} \). The explicit expression of \( R_0 \) is given by
where \( c_{1}=\epsilon +\delta +d,\, c_{2}=\theta +\eta _{a}+d+\rho {a},\, c_{3}=\kappa +\lambda +\eta _{i}+d+\rho _{i}, \, c_{5}=\rho {h}+\eta _{h}+d, \, \text{ and } \, c=\frac{\beta \varPi (\xi \alpha u+d)}{d(\alpha u+d)} \).
To find sensitivity indices of \( R_0 \), we consider the parameters \( \varPi , \, \beta ,\, \epsilon ,\, \delta ,\, \xi ,\, \alpha ,\) \( u,\, d,\, \theta ,\, \eta _{a},\, \rho _{a},\, \kappa ,\, \lambda , \eta _{i}, \, \text{ and } \, \lambda _{i} \) since \( R_0 \) is the function of only these parameters. All sensitive indices can be carried out, and expressions are given below.

The sensitivity index of \( R_{0} \) against the concerning parameters

Contour plots indicating nature of change in basic reproduction number (\(R_{0}\)) of model (1) under parametric planes. Contour Plot of \( R_{0} \) as a function of \( \alpha \) and \( \beta \)

Contour plots indicating nature of change in basic reproduction number (\(R_{0}\)) of model (1) under parametric planes. The Contour Plot of \( R_{0} \) as a function of \( \alpha \) and u
Table 2 contains the sensitivity indices for the basic reproduction number \( R_{0} \) for the values of parameters in Table 1.
From Table 2, it is clear that the most sensitive parameters for the basic reproduction number \( R_{0} \) of model 1 are \( \varPi , \beta , \alpha \) and u. The positive index indicates that \( R_{0} \) is an increasing function of the relevant parameter, while the negative index indicates that \( R_{0} \) is a decreasing function of the relevant parameter. For example, \( \varGamma _{\beta }^{R_0}=1\), means that if we increase the parameter \( \beta \) by some percentage, then \( R_{0} \) is also increased with the same percentage. Additionally, a rise in the value of \(\epsilon \) will result 36.84% increase in the basic reproduction number. In contrast, increasing the value of \(\alpha \) reduces \( R_{0} \) by 76.30 %. As shown in Table 1, \(\varPi \) and \( \beta \) have a greater positive effect on \( R_{0} \) than \(\epsilon , \delta , \xi \) and \(\alpha \) and u have a greater negative effect on \( R_{0} \) than the remaining parameters affecting \( R_{0} \).
The results shown in Table 2 are depicted in Fig. 4. This figure demonstrates that parameters with a right-hand sidebar have a positive effect on, \( R_{0} \), whereas parameters with a left-hand sidebar have a negative effect, as well as longer the bar, the greater the sensitivity of \( R_{0} \) for that parameter.
Figures 5 and 6 show the contour plots of the basic reproduction number \( R_{0} \) with respect to the parameters \( \alpha \) vs \( \beta \) and \( \alpha \) vs u, respectively. As illustrated in Fig. 5, when \( \beta \) increases and \( \alpha \) decreases then \( R_{0} \) will increase. Thus, in order to control the ongoing COVID-19 pandemic, the basic reproduction number, \( R_{0} \), must be lowered, for which we must take measures to increase the value of \( \alpha \) and to slow the disease transmission rate \( \beta \). As seen in Fig. 6, when the control parameter u and the vaccination parameter \( \alpha \) increases then \( R_{0} \) falls. By increasing the value of the control parameter u, the number of persons vaccinated increases and the rate of vaccination increases as well.
We know that the basic reproduction number, \( R_{0} \), therefore, in order to control the dynamics of disease transmission, we must reduce the value of \( R_{0} \). As a result of Table 2 and Figs. 4, 5 and 6, we can conclude that parameters with negative indices can be increased in order to significantly reduce \( R_{0} \). Additionally, we can observe that parameters such as \( \varPi \), and \( \beta \) have positive indices, implying that by lowering their values, we can lower \( R_{0} \). As a consequence, we can control disease transmission in this manner.
5.3 Bifurcation diagram
In order to examine disease-free equilibria in system (1), Theorem 2 demonstrates that system (1) may undergo a transcritical bifurcation at the threshold parameter condition \( R_{0} = 1 \). It has been discovered that system (1) exhibits a transcritical bifurcation when \( R_{0} = 1 \), which is seen in Fig. 7. The locally stable equilibria are shown by solid blue lines, whereas the unstable equilibria are represented by dashed red lines. As the disease-free equilibrium is locally asymptotically stable for \( R_{0} < 1 \), a solid blue line represents it. The disease-free equilibrium is unstable if \( R_{0} > 1 \), and it is depicted as a red dashed line on the graph.

The transcritical bifurcation diagram shows the behaviour of stability of disease-free equilibrium around \( R_{0} \). Here, solid blue line depicts stability state and red dashed line depicts unstability
5.4 Numerical simulation of the optimal control problem
We now conduct a numerical simulation of the formulated optimum control problem. Using the forward fourth-order R-K technique, we begin by finding the numerical solution of system (1) using the initial values specified in Table 2. Then, utilising the numerical solution of the system and the transversality conditions, we apply the backward fourth-order R-K technique to determine the numerical solution of the system of adjoint equations.

Dynamics of classes in presence and absence of vaccination strategy

Dynamics of the adjoint variables when control applied optimally

Dynamics of the vaccination strategy
We take the parametric values the same as in Table 1 except for \( \alpha =0.5 \) and keep the same set of initial values. For numerical simulation, we take \( b_{1}=1.2, b_{2}=1.2, b_{3}=1 \). Fig. 8 represents the dynamics of populations of all the classes in the presence and absence of an optimal control strategy. From Fig. 8, we can see that in the absence of a control strategy, the population of the susceptible and the vaccinated classes goes down faster than a control strategy. In the absence of vaccination, the populations of the remaining classes other than the isolated class increase then decrease exponentially and get flattered after some time. When vaccination is there, then the population of the classes increases slowly. In the absence of vaccination, the population of the infected class increases and then decreases exponentially after that gets flattered, but in the presence of vaccination strategy, the infected class goes down slowly.
In Fig. 9, we plotted the solution of the system of adjoint Eq. 4. Fig. 9 shows the variation in the evaluation of adjoint variables when the optimal control is applied to the proposed model. In Fig. 10, we plotted the variation in the optimal control parameter u(t). We noticed in Fig. 10 that we initially keep a high vaccination rate for controlling the disease transmission and then decrease it gradually such that implementation cost is also minimised. This phenomenon is justified because as more and more populations are vaccinated, immunity against the virus also develops naturally in public, so we can gradually decrease the vaccination rate.
5.5 Parameter estimation-model fitting and model validation
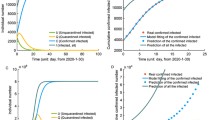
The period from March 25, 2020, to April 24, 2020, is considered for model fitting. In India, we have accumulated daily cases of COVID-19 for this analysis. Cumulative COVID-19 cases were acquired from reference [29]. Model (1) is calibrated for India’s cumulative daily cases. We enumerated the principal model parameters determined from data, in Table 3. The data will also estimate some of the initial conditions of model (1). Fitting cumulative daily cases in MATLAB is accomplished with the least-square function fmincon. Tables 3 and 4 list the parameters and initial conditions calculated using the approach described above. The daily cumulative reported cases of India are fitted and displayed in Fig. 11.

Model (1) fitted to cumulated daily cases of India from April 25, 2020, to May 10, 2020. Here, observed data points are shown in red dots and the solid blue line depicts the model fitted curve

The Bar graph of daily infected cases. The blue bar shows the model predicted cases and red bar depicts the observed cases
We validate the model by comparing the model prediction with the reported data. We compared the daily cases predicted by the algorithm from April 25, 2020, to May 10, 2020. Fig. 12 depicts the model prediction scenarios estimated from the set of parameters and initial values from Tables 3 and 4 , respectively.
6 Conclusion
This study modified the SEIR model to include eight infection classes and vaccination as a control parameter in order to simulate and predict the spread of a novel coronavirus disease. To begin, mathematical analysis was used to demonstrate the positivity and boundedness, disease-free equilibrium, and basic reproduction number of the suggested model. In the second step, The qualitative dynamic behaviour of the model was explored, and the basic reproduction number, \( R_{0} \), was calculated using the next-generation matrix approach. The result indicates that the model is asymptotically stable at infection-free equilibrium for \( R_{0}<1 \) and unstable for \( R_{0}>1 \). We analysed the optimum control issue and performed several numerical simulations on the solutions of the model. In addition, we performed sensitivity analysis and generated a bifurcation diagram. A simulation of the optimum control has been performed numerically. Validation and prediction of models are also performed.
Finally, we investigated the impact of vaccination on the spread of the disease and showed that a combination of community mitigation strategies and vaccination events could be effective measures to diminish coronavirus by minimising social and economic costs. Our analysis demonstrates that expanding the vaccination program considerably reduces the number of confirmed cases and deaths. The proposed model can be used to assist public health officials in planning, preparing, and implementing appropriate measures and decisions to control the pandemic.
Additionally, the models we presented contain a large number of parameters whose estimated values may be subjected to uncertainty. Thus, uncertainty analysis may be used to determine the parameters that have the largest impact on the chosen response function based on the numerical simulation results.
Data availability
The datasets that analysed and support the findings of this study are available within the article.
References
World Health Orgnization: Naming the coronavirus disease (COVID-19) and the virus that causes it (2020). https://www.who.int/emergencies/diseases/novel-coronavirus-2019/technical-guidance/naming-the-coronavirus-disease-(covid-2019)-and-the-virus-that-causes-it. Accessed 15 Sep 2021
WHO Director-General’s opening remarks at the media briefing on COVID-19 - 11 March 2020 (2020). https://www.who.int/director-general/speeches/detail/who-director-general-s-opening-remarks-at-the-media-briefing-on-covid-19---11-march-2020. Accessed 15 Sep 2021
World Health Organization: Coronavirus (COVID-19) dashboard (2021). https://covid19.who.int/. Accessed 18 Sep 2021
NCBI: First confirmed case of COVID-19 infection in India: a case report. https://www.ncbi.nlm.nih.gov/pmc/articles/PMC7530459/. Accessed 15 Sep 2021
World Health Orgnization: Coronavirus Disease (COVID-19) Dashboard With Vaccination Data - India (2021). URL https://covid19.who.int/region/searo/country/in. Accessed 18 Sep 2021
Kermack, W., Mckendrick, A.: A contribution to the mathematical theory of epidemics. Am. Math. Mon. 45(7), 446 (1938). https://doi.org/10.2307/2304150
Kermack, W., Mckendrick, A.: Contributions to the mathematical theory of epidemics–I. Bull. Math. Biol. 53(1–2), 33–55 (1991). https://doi.org/10.1007/BF02464423
Soni, R., Chouhan, U.: A dynamic effect of infectious disease on prey predator system and harvesting policy. Biosci. Biotechnol. Res. Commun. 11, 231–237 (2018)
Buonomo, B., D’Onofrio, A., Lacitignola, D.: Global stability of an SIR epidemic model with information dependent vaccination. Math. Biosci. 216(1), 9–16 (2008). https://doi.org/10.1016/j.mbs.2008.07.011
Jana, S., Haldar, P., Kar, T.K.: Optimal control and stability analysis of an epidemic model with population dispersal. Chaos, Solitons Fractals 83, 67–81 (2016). https://doi.org/10.1016/j.chaos.2015.11.018
Jana, S., Nandi, S.K., Kar, T.K.: Complex dynamics of an SIR epidemic model with saturated incidence rate and treatment. Acta. Biotheor. 64(1), 65–84 (2016). https://doi.org/10.1007/s10441-015-9273-9
Li, L., Wang, C.H., Wang, S.F., Li, M.T., Yakob, L., Cazelles, B., Jin, Z., Zhang, W.Y.: Hemorrhagic fever with renal syndrome in China: mechanisms on two distinct annual peaks and control measures. Int. J. Biomath. 11(2), 1850030 (2018). https://doi.org/10.1142/S1793524518500304
Acuña-Zegarra, M.A., Olmos-Liceaga, D., Velasco-Hernández, J.X.: The role of animal grazing in the spread of Chagas disease. J. Theor. Biol. 457, 19–28 (2018). https://doi.org/10.1016/j.jtbi.2018.08.025
Avilov, K.K., Romanyukha, A.A., Borisov, S.E., Belilovsky, E.M., Nechaeva, O.B., Karkach, A.S.: An approach to estimating tuberculosis incidence and case detection rate from routine notification data. Int. J. Tuberc. Lung Dis. 19(3), 288–294 (2015). https://doi.org/10.5588/ijtld.14.0317
Jiang, S., Wang, K., Li, C., Hong, G., Zhang, X., Shan, M., Li, H., Wang, J.: Mathematical models for devising the optimal Ebola virus disease eradication. J. Transl. Med. 15(1), 124 (2017). https://doi.org/10.1186/s12967-017-1224-6
Carvalho, S.A., Silva, SOd., Charret, Id.C.: Mathematical modeling of dengue epidemic: control methods and vaccination strategies. Theory Biosci. 138(2), 223–239 (2019). https://doi.org/10.1007/s12064-019-00273-7
Ndaïrou, F., Area, I., Nieto, J.J., Torres, D.F.M.: Mathematical modeling of COVID-19 transmission dynamics with a case study of Wuhan. Chaos, Solitons Fractals 135, 109846 (2020). https://doi.org/10.1016/j.chaos.2020.109846
Mandal, M., Jana, S., Kumar, S., Khatua, A., Adak, S., Kar, T.K.: A model based study on the dynamics of COVID-19: prediction and control. Chaos, Solitons Fractals 136, 109889 (2020). https://doi.org/10.1016/j.chaos.2020.109889
Prathumwan, D., Trachoo, K., Chaiya, I.: Mathematical modeling for prediction dynamics of the Coronavirus disease 2019 (COVID-19) pandemic, quarantine control measures. Symmetry 12(9), 1404 (2020). https://doi.org/10.3390/SYM12091404
Biswas, S.K., Ghosh, J.K., Sarkar, S., Ghosh, U.: COVID-19 pandemic in India: a mathematical model study. Nonlinear Dyn. 102(1), 537–553 (2020). https://doi.org/10.1007/s11071-020-05958-z
Gumel, A.B., Iboi, E.A., Ngonghala, C.N., Elbasha, E.H.: A primer on using mathematics to understand COVID-19 dynamics: modeling, analysis and simulations. Infect. Dis. Model. 6, 148–168 (2021). https://doi.org/10.1016/j.idm.2020.11.005
Ghostine, R., Gharamti, M., Hassrouny, S., Hoteit, I.: An extended SEIR model with vaccination for forecasting the COVID-19 Pandemic in Saudi Arabia using an ensemble Kalman filter. Mathematics 9(6), 636 (2021). https://doi.org/10.3390/math9060636
Das, P., Upadhyay, R.K., Misra, A.K., Rihan, F.A., Das, P., Ghosh, D.: Mathematical model of COVID-19 with comorbidity and controlling using non-pharmaceutical interventions and vaccination. Nonlinear Dyn. 106(2), 1213–1227 (2021). https://doi.org/10.1007/s11071-021-06517-w
Das, P., Nadim, S.S., Das, S., Das, P.: Dynamics of COVID-19 transmission with comorbidity: a data driven modelling based approach. Nonlinear Dyn. 106, 1197–1211 (2021). https://doi.org/10.1007/s11071-021-06324-3
Yu, X., Qi, G., Hu, J.: Analysis of second outbreak of COVID-19 after relaxation of control measures in India. Nonlinear Dyn. 106, 1149–1167 (2021). https://doi.org/10.1007/s11071-020-05989-6
Hu, J., Qi, G., Yu, X., Xu, L.: Modeling and staged assessments of the controllability of spread for repeated outbreaks of COVID-19. Nonlinear Dyn. 106, 1411–1424 (2021). https://doi.org/10.1007/s11071-021-06568-z
Xin, H., Li, Y., Wu, P., Li, Z., Lau, E.H.Y., Qin, Y., Wang, L., Cowling, B.J., Tsang, T.K., Li, Z.: Estimating the latent period of coronavirus disease 2019 (COVID-19). Clin. Infect. Dis. 74(9), 1678–1681 (2021). https://doi.org/10.1093/cid/ciab746
Van Den Driessche, P., Watmough, J.: Reproduction numbers and sub-threshold endemic equilibria for compartmental models of disease transmission. Math. Biosci. 180(1–2), 29–48 (2002). https://doi.org/10.1016/S0025-5564(02)00108-6
Worldometer: COVID-19 CORONAVIRUS PANDEMIC (2022). https://www.worldometers.info/coronavirus/country/india/. Retrived 09 May 2022
Central Intelligence Agency: India - The World Factbook - CIA. https://www.cia.gov/the-world-factbook/countries/india/people-and-society. Retrieved 09 May 2022
Sardar, T., Nadim, S., Rana, S., Chattopadhyay, J.: Assessment of lockdown effect in some states and overall India: a predictive mathematical study on COVID-19 outbreak. Chaos Solitons Fractals (2020). https://doi.org/10.1016/j.chaos.2020.110078
India covid-19 tracker (2022). URL https://www.covid19india.org/. Retrieved 09 May 2022
Funding
The authors declare that no funds, grants, or other support were received during the preparation of this manuscript.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kurmi, S., Chouhan, U. A multicompartment mathematical model to study the dynamic behaviour of COVID-19 using vaccination as control parameter. Nonlinear Dyn 109, 2185–2201 (2022). https://doi.org/10.1007/s11071-022-07591-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-07591-4