
Abstract
Based on state feedback control approach and disturbance observer method, a new composite synchronization control strategy is presented in this study for a class of delayed coupling complex dynamical networks with two different types of disturbances. Herein, one of the disturbances is produced by an exogenous system which acts through the input channel, while the other is usual norm-bounded. The main objective of this study is to exactly estimate the disturbance at the input channel, whose output is integrated with the state feedback control law. In this study, the composite control strategy is designed in two forms according to the present and past states’ information about the system. By applying the Lyapunov–Krasovskii stability theory, a new set of sufficient conditions is obtained for the existence of both control strategies separately through the feasible solution of a series of matrix inequalities. The superiority and validity of the developed theoretical results are demonstrated by two numerical examples, wherein it is shown that the proposed control strategy is capable of handling multiple disturbances in the synchronization analysis.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
For more than a couple of decades, several research scholars from science and engineering community have been paying their sincere attention to the investigation of dynamical behavior and control problems of complex dynamical networks [1,2,3]. This is because of the fact that complex dynamical networks have tremendous potential applications in numerous fields, including metabolic systems, electronic power grids, biological neural networks, large-scale sensor networks and genetic regulatory networks. It is pointed out that one of the most prominent dynamical behaviors in the context of complex dynamical networks is synchronization which has been broadly investigated in recent years. A great number of significant works related to this issue have been reported in the literature [4,5,6,7,8]. This peculiar behavior has a variety of real-time applications, such as information processing, secure communication, neural networks and image processing [9,10,11,12]. However, it is important to explore some modeling techniques for the purpose of examining the synchronous behaviors of a complex dynamical network. It is mentioned that algebraic graph theory has been widely recognized and utilized as the most convenient and elegant technique to model the communications among nodes in a network. At the same time, the role of controllers is very significant in driving the network to reach synchronization in cases where a complex dynamical network cannot achieve synchronization by itself. Consequently, some interesting control methods in systems and control theory, such as adaptive control [13], event-triggered control [14], fault-tolerant control [15, 16], impulsive control [17, 18], non-fragile control [19], pinning control [20, 21] and sampled-data control [22], have been applied to ensure synchronization and improve system performance of various kinds of complex dynamical networks.
It is well known that when modeling the real-world complex dynamical networks, the phenomenon of time delays is unavoidable owing to finite speed of signals transmission over the links, which may destroy the desired synchronization or induce some undesirable dynamics. Therefore, it is of great importance to consider time delays in the signal transmission among nodes or through coupling of a dynamical network from both practical and theoretical perspectives. By taking this fact into account, many remarkable results on synchronization of complex dynamical networks with coupling delay have been reported in the recent literature. For instance, an interesting exponential synchronization problem of complex dynamical network subject to time-varying coupling delay and variable sampling has been investigated in [23] by utilizing the Lyapunov–Krasovskii functional method and convex combination technique. With the aid of input delay approach and sampled-data control law, the exponential synchronization problem for a class of complex dynamical networks against distributed coupling delay has been reported in [24]. A robust synchronization problem of complex dynamical networks with additive time-varying coupling delays has been investigated in [25] by using the well-known passivity theory. In [26], the issue of synchronization for complex dynamical networks in the presence of interval time-varying coupling delays has been discussed by introducing the concept of closeness centrality in the outer-coupling matrix.
Besides the above, external disturbances may often exist in most practical engineering systems, which are one of the crucial factors that deteriorate the closed-loop system performance. In order to attenuate the influence of external disturbances and enhance the system performance, several methods, such as adaptive control method [27], disturbance observer-based control method [28] and \(H_\infty \) theory [29], have been proposed in the literature. Among them, the disturbance observer-based control method has been regarded as an active disturbance rejection scheme and has received increasing attention [30, 31] because of its high efficiency, practicability and strong robustness. The idea behind this method is that an observer is constructed to estimate the disturbance and a conventional control law together with a feedback compensator, which is obtained from the output of the observer, is applied to reject the disturbance and accomplish the desired goals. However, it should be mentioned that many practical systems can be affected by multiple types of disturbances that should be expressed in different forms since they may have distinct characteristics. In this situation, the aforementioned approaches unfortunately could not lead to obtain high precision control performance. To overcome this shortcoming, composite anti-disturbance control strategies have been commonly implemented in which the different types of disturbances acting on the system under consideration could be attenuated and rejected completely by integrating the disturbance observer-based controller with the known traditional control methods [32]. Recently, a substantial amount of effort has been directed toward developing composite anti-disturbance control algorithms for various kinds of dynamical systems. For example, see [33,34,35] and the references related to them. Nevertheless, it is worth mentioning that so far in the literature, the design problem of composite anti-disturbance controller has not yet been discussed in the context of synchronization for complex dynamical networks despite its clear practical insight.
By considering the above concern, this paper aims at making the first attempt to design a distributed composite anti-disturbance control strategy for achieving robust synchronization in a class of complex dynamical networks with coupling delay and multiple disturbances. The significant contributions of this paper are given in the following three points:
A new distributed composite control scheme that involves the disturbance observer method and the state feedback control law is proposed for the first time to solve synchronization problem of delayed coupling complex dynamical networks with two distinct types of disturbances.
According to the information about system states, the proposed controller is designed in two forms by utilizing the Lyapunov–Krasovskii functional approach and the constructed disturbance observer, which both can render the considered network be asymptotically synchronized.
Developed theoretical results are validated through two numerical examples, wherein the proposed control protocols provide much better performance than the existing \(H_\infty \) control method.
The remaining parts of this paper are listed as follows: The problem to be formulated and its necessary preliminaries are given in Sect. 2. The required main results are established in Sects. 3 and 4. Section 5 provides simulation examples to verify the proposed results, which is followed by Sect. 6 to present the conclusion of the paper. Further, the notations and symbols employed throughout this paper are fairly standard. Thus, they are not provided here in detail.
2 Problem formulation and preliminaries
Let us consider a class of complex dynamical networks with time-varying coupling delay and multiple disturbances, described by the following set of differential equations:
where M is the number of nodes in the network; \(x_i(t)\in \mathbb {R}^n\) denotes the state vector of the ith node; \(g(x_i(t))\) is a continuous vector-valued nonlinear function; \(\kappa >0\) represents the coupling strength; the scalars \(\alpha _{ij}\) are associated with the zero-row-sum outer-coupling matrix \(\Lambda =[\alpha _{ij}]_{M\times M}\); \(D=\text{ diag }\{d_1,d_2,\ldots ,d_n\}>0\) stands for the inner-coupling matrix; \(u_i(t)\in \mathbb {R}^m\) and \(d_i(t)\in \mathbb {R}^m\) represent the control input and the disturbance performing in the input channel of the ith node, respectively; \(w_i(t)\in \mathbb {R}^l\) describes an additional disturbance and is assumed to be a square integrable function; the function h(t) denotes the time-varying coupling delay satisfying \(0<h_1\le h(t)\le h_2<\infty \) and \(\dot{h}(t)\le \mu <1\), where \(h_1\), \(h_2\) and \(\mu \) are known constants; A, \(B_g\), B and \(B_w\) are system matrices with appropriate dimensions; and \(\varphi _i(t)\) stands for the initial value of the state of the ith node.
In this study, without loss of generality, it is considered that \(d_i(t)\) is unknown and generated by a family of exogenous systems whose dynamics are given as follows:
where \(\delta _i(t)\in \mathbb {R}^p\) represents the state vector of the ith system; \(\eta _i(t)\in \mathbb {R}^q\) denotes the disturbance caused by the exogenous signals acting on the ith system and is assumed to be a square integrable function. Further, \(A_d\in \mathbb {R}^{p\times p}\), \(B_d\in \mathbb {R}^{p\times q}\) and \(C_d\in \mathbb {R}^{m\times p}\) are given constant matrices.
Remark 1
It is worth mentioning that the network under consideration consists of two different kinds of external disturbances, namely matched and mismatched disturbances. In order to efficiently deal with these disturbances, two different methodologies are applied in this study. To be precise, a distributed disturbance observer method is adopted to accurately estimate the matched disturbances in which the estimated values are employed in the process of feedforward compensation and the traditional \(H_\infty \) control method is used to attenuate the effect of mismatched disturbances. Thus, this kind of composite anti-disturbance control strategy is more appropriate and flexible to deal with the systems containing multiple disturbances.
Let s(t) be a solution to the unforced isolated node whose dynamics are represented by the differential equation \(\dot{s}(t)=As(t)+B_gg(s(t))\). It should be mentioned that in the context of synchronization analysis of complex dynamical networks, s(t) is referred to as an equilibrium point and viewed as the reference state that will be tracked by the states of complex dynamical network. In order to realize the synchronization of considered network (1) and the equilibrium point, an error variable is defined by \(e_{x_i}(t)=x_i(t)-s(t)\) for all \(i=1,2,\ldots ,M\). Then, by using the property of zero-row-sum outer-coupling matrix (i.e., \(\sum _{j=1}^{M}\alpha _{ij}=0\)), a set of error systems can be obtained as follows:
where \(g(e_{x_i}(t))=g(x_i(t))-g(s(t))\).
To ease the required analysis, it is very important to consider the following two assumptions:
Assumption 1
For all \(i=1,2,\ldots ,M\), the pair (A, B) is controllable and the pair \((A_d,BC_d)\) is observable.
Assumption 2
For all \(x,y\in \mathbb {R}^n\), the nonlinear function \(g(\cdot )\) satisfies the following sector-bound condition:
where U and W are given constant matrices with proper dimensions. Moreover, without loss of generality, it is chosen that \(g(0)=0\). Obviously, the above nonlinearity condition is more general than the Lipschitz nonlinearity and the norm-bounded nonlinearity conditions.
In order to estimate the disturbance \(d_i(t)\), inspired by the seminal works in [32, 33], a distributed disturbance observer according to systems (2) and (3) can be constructed as follows:
where \(\hat{d}_i(t)\) and \(\hat{\delta }_i(t)\) are the estimations of \(d_i(t)\) and \(\delta _i(t)\), respectively, \(\lambda _i(t)\) signifies the internal state of the observer and \(K_1\) denotes the observer gain matrix with appropriate dimension, which will be determined in the forthcoming section.
For the purpose of achieving the required synchronization in system (1) without any interruption, here a robust control protocol is to be designed such that both external disturbances are rejected and the synchronization error system (3) is asymptotically stable and satisfies the performance of disturbance attenuation. Thus, by combining the state feedback control scheme and the disturbance observer method, a robust composite synchronization control law is adopted in the following form:
where \(K_2\) is the state feedback gain matrix that to be designed later. More specifically, the estimation term \(\hat{d}_i(t)\) is subtracted in (7) for the purpose of compensating the impact of unknown disturbance in the control channel.
By defining \(e_{\delta _i}(t)=\delta _i(t)-\hat{\delta }_i(t)\) and applying the synchronization control law (7) to the error system (3), it is easy to obtain the following two set of equations:
In this study, the measured output of the ith node is considered as \(z_i(t)=Ce_{x_i}(t)\), where C is a constant matrix with proper dimension. Thus, based on the systems (8) and (9), the composite system can be formulated as follows:
where \(\zeta _i(t)=[e^\mathrm{T}_{x_i}(t) \quad e^\mathrm{T}_{\delta _i}(t)]^\mathrm{T}\), \(\varpi _i(t)=[w^\mathrm{T}_i(t) \quad \eta ^\mathrm{T}_i(t)]^\mathrm{T}\), \(g(\zeta _i(t))=[g^\mathrm{T}(e_{x_i}(t)) \quad g^\mathrm{T}(e_{\delta _i}(t))]^\mathrm{T}\),
For representation convenience, denote
By utilizing the Kronecker product properties, the closed-loop composite system (10) can be equivalently written in the compact from as
It should be mentioned that the synchronization problem of the network (1) is converted into the stability problem of the augmented system (11). This stability problem guarantees \(e_{x_i}(t)\rightarrow 0\) for all \(i=1,2,\ldots ,M\) from which it is straightforward that \(x_i(t)\rightarrow s(t)\) for all \(i=1,2,\ldots ,M\), which is the required synchronization. Thus, it is sufficient to establish the stability criterion for the system (11) in order to solve the problem under consideration.
The following definition and lemma are indispensable for the subsequent analysis.
Definition 1
The closed-loop composite system (11) is said to be asymptotically stable and satisfies a given \(H_\infty \) disturbance attenuation level \(\gamma \), if it is asymptotically stable with \(\varpi (t)=0\), and under the zero initial condition, there exists a scalar \(\gamma >0\) such that the inequality \(\int _{0}^{\infty }z^\mathrm{T}(t)z(t){\mathrm {d}}t\le \gamma ^2\int _{0}^{\infty }\varpi ^\mathrm{T}(t)\varpi (t){\mathrm {d}}t\) holds for \(\varpi (t)\ne 0\).
Lemma 1
[36] For any constant matrix \(Z>0\) and continuously differentiable function x in \([a,b]\rightarrow \mathbb {R}^{n}\), the following inequality holds:
where \(\Omega =x(b)+x(a)-\frac{2}{b-a}\int _a^bx(s){\mathrm {d}}s\).
3 Synchronization analysis under the composite control law
In this part, let us pay attention to solve the asymptotic synchronization problem of system (1) via the designed control protocol (7). More specifically, by using the Lyapunov–Krasovskii functional method, the desired synchronization criterion is obtained by means of the augmented system (11) and the approach of the determination of the observer gain and controller gain matrices is given subsequently.
Theorem 1
Let us consider the complex dynamical network (1) with the composite control law (7) under Assumptions 1 and 2. Given positive scalars \(\kappa \), \(\alpha \), \(h_1<h_2\), \(\mu <1\), \(\nu _a\)\((a=1,2)\) and matrices \(U\in \mathbb {R}^{n\times n}\), \(W\in \mathbb {R}^{n\times n}\), the augmented system (11) is asymptotically stable and satisfies a prescribed \(H_\infty \) disturbance attenuation level \(\gamma >0\) if there exist symmetric positive definite matrices \(Q_1\in \mathbb {R}^{n\times n}\), \(Q_2\in \mathbb {R}^{p\times p}\), \(R_b\in \mathbb {R}^{n\times n}\)\((b=1,2,3)\), matrices \(X\in \mathbb {R}^{m\times m}\), \(Y_1\in \mathbb {R}^{m\times n}\), \(Y_2\in \mathbb {R}^{p\times n}\) and a scalar \(\rho >0\) satisfying the following conditions:
where the nonzero elements of the matrix \(\hat{\Pi }\) are defined by
If the conditions (12) and (13) have a feasible solution, then the desired observer gain and control gain matrices are determined by using the relations \(K_1=Q_2^{-1}Y_2\) and \(K_2=X^{-1}Y_1\), respectively.
Proof
In order to show that the composite system (11) is asymptotically stable with a satisfactory disturbance attenuation level \(\gamma >0\), the following Lyapunov–Krasovskii functional is considered for the system (11):
where
where \(e_x(t)=[e_{x_1}^\mathrm{T}(t),e_{x_2}^\mathrm{T}(t),\ldots ,e_{x_M}^\mathrm{T}(t)]^\mathrm{T}\) and
\(Q=\text{ diag }\{Q_1,Q_2\}\).
Now by calculating the derivative of the functional V(t) along the solution trajectory of system (11), it follows that
where \(e_{\delta }(t)=[e_{\delta _1}^\mathrm{T}(t),e_{\delta _2}^\mathrm{T}(t),\ldots ,e_{\delta _M}^\mathrm{T}(t)]^\mathrm{T}\).
With the aid of Lemma 1, the integral terms in \(\dot{V}_3(t)\) are bounded as follows:
where
On the other hand, for any positive scalar \(\alpha \), the following inequality can be deduced from Assumption 2:
where \(U_1\) and \(U_2\) are specified in the theorem statement.
Then, by combining the relations from (15) to (20), it can be easily obtained that
where
with \(E_1=[B_w \; 0], E_2=[K_1B_w \; B_d]\) and the rest of the elements of \(\Pi \) are zero.
In light of Schur complement, the matrix terms in right-hand side of (21) can be put in the following form:
where \(\Pi _2=\Big [(I\otimes (A+BK_2)) \quad (I\otimes BC_d) \quad 0\)\(\kappa (\Lambda \otimes D) \quad 0 \quad 0 \quad 0 \quad (I\otimes B_g) \quad (I\otimes B_w)\Big ]^\mathrm{T}(I\otimes Q_1)\).
Now let us introduce some new variables in the above matrix as \(Q_1B=BX\), \(Y_1=XK_2\) and \(Y_2=Q_2K_1\). It should be noted that the equality constraint \(Q_1B=BX\) might be hard to solve by using MATLAB LMI toolbox. Thus, according to the work in [37], it can be converted into the inequality constraint (13) for a relatively small value \(\rho >0\). Suppose that \(\varpi (t)=0\), then the matrix \(\Lambda _2\) can be deduced by
where \(\hat{\Pi }_2=\Big [(I\otimes (A+BK_2)) \quad (I\otimes BC_d) \quad 0\)\(\kappa (\Lambda \otimes D) \quad 0 \quad 0 \quad 0 \quad (I\otimes B_g) \Big ]^\mathrm{T}(I\otimes Q_1)\). Hence, it is concluded from (12) that \(\Gamma _3<0\), which directly implies \(\dot{V}(t)<0\). Therefore, according to the Lyapunov stability theory, the closed-loop composite system (11) with \(\varpi (t)=0\) is asymptotically stable.
Moreover, to attenuate the influence of external disturbances in system (11), the following performance index is considered:
where \(\gamma >0\). To complete the proof, the above performance index under \(V(0)=0\) can be rewritten as
According to (21), the computation of the integrand in (23) yields the following matrix:
where \(\hat{\Gamma }_1=\left[ \begin{array}{cc} \Pi +\Pi _3\Pi _3^\mathrm{T} &{} \Pi _1 \\ *&{} -\gamma ^2 I \end{array} \right] \) and \(\Pi _3=\left[ (I\otimes C) \quad \underbrace{0 \quad \cdots \quad 0}_{7}\right] ^\mathrm{T}\).
Now by using the property of matrix addition, it can be observed that (12) is equivalent to \(\Gamma _4<0\), and consequently, if the inequalities (12) and (13) are satisfied, then it is clear to see that \(J<0\), \(\forall T>0\). This guarantees the required condition \(\int _{0}^{\infty }\left[ z^\mathrm{T}(t)z(t)-\gamma ^2 \varpi ^\mathrm{T}(t)\varpi (t)\right] {\mathrm {d}}t<0\). Thus, the composite system (11) is asymptotically stable and satisfies the \(H_\infty \) disturbance attenuation level \(\gamma \) according to Definition 1, which completes the proof. \(\square \)
In the above, a robust composite control protocol is designed that ultimately ensures the synchronization of considered complex dynamical networks, where the information of past states of system (1) is not involved in its design though the system containing a time-varying delay. Therefore, the designed protocol does not need to provide exact synchronization results. By considering this scenario, in an aim to achieve the exact synchronization and enhance the overall system performance, the information about past states of system (1) is incorporated into the proposed control design. Then, the composite synchronization control law (7) can be modified in the form of
where \(K_3\) is the memory state feedback gain matrix that will be designed in the upcoming theorem.
According to the synchronization control law (24), the error system (3) can be written as
Moreover, by combining the systems (9) and (25), a new set of composite systems is obtained as follows:
where \(\mathcal {A}_3=\left[ \begin{array}{cc} BK_3 &{} 0 \\ 0 &{} 0 \end{array} \right] \) and the remaining parameters are defined in (10). Then, the closed-loop composite system (26) can be expressed in the following compact form:
4 Synchronization analysis under the composite memory control law
In this part, let us concentrate on the issue of asymptotic synchronization problem of system (1) via the memory control protocol (24). For this case, the synchronization criterion and the associated gain matrices relations can be easily obtained by following the same procedure carried out as in Theorem 1 with the new augmented system (27) and the controller (24).
Theorem 2
Let \(U\in \mathbb {R}^{n\times n}\) and \(W\in \mathbb {R}^{n\times n}\) be given matrices, \(\kappa \), \(\alpha \), \(h_1<h_2\), \(\mu <1\) and \(\nu _a\)\((a=1,2)\) be given positive scalars, and Assumptions 1 and 2 be true. Then, the composite system (27) is asymptotically stable and satisfies a prescribed \(H_\infty \) disturbance attenuation level \(\gamma >0\), if there exist symmetric positive definite matrices \(Q_1\in \mathbb {R}^{n\times n}\), \(Q_2\in \mathbb {R}^{p\times p}\), \(R_b\in \mathbb {R}^{n\times n}\)\((b=1,2,3)\), matrices \(X\in \mathbb {R}^{m\times m}\), \(Y_1\in \mathbb {R}^{m\times n}\), \(Y_2\in \mathbb {R}^{p\times n}\), \(Y_3\in \mathbb {R}^{m\times n}\) and a positive scalar \(\rho \), such that the inequality (13) and the condition below are satisfied:
where the matrix \(\tilde{\Pi }\) has the same elements that the matrix \(\hat{\Pi }\) defined in Theorem 1 has, except the following elements:
and
Moreover, the desired gain matrices are determined by using the relations \(K_1=Q_2^{-1}Y_2\), \(K_2=X^{-1}Y_1\) and \(K_3=X^{-1}Y_3\).
Proof
With the use of Theorem 1, the proof of this theorem can easily be completed. More precisely, by constructing the same Lyapunov–Krasovskii functional (14) and following a similar line proof of Theorem 1 with respect to system (27) together with an assumption that \(Y_3=XK_3\), the matrix \(\tilde{\Pi }\) given in (28) can be obtained directly. Thus, the proof of this theorem is not displayed here. As a result, if the conditions in (13) and (28) hold, then the composite system (27) is asymptotically stable and satisfies a prescribed \(H_\infty \) disturbance attenuation level \(\gamma >0\). This concludes the proof. \(\square \)
Remark 2
It should be noted that the analysis and control synthesis for synchronization problems of complex dynamical networks have received much attention from research communities in recent years. For instance, see [4,5,6,7, 13,14,15, 17, 19, 21] and the references cited therein. However, most of the existing works including the above-cited ones concentrated on the issue of synchronization in various kinds of complex dynamical networks only with single external disturbance. From the viewpoint of practical applications, dynamical systems are often affected by multiple types of disturbances that may have different properties. Therefore, it is indeed important and interesting to examine the synchronous behavior of complex dynamical networks in the presence of multiple disturbances. It should be noted that the aforementioned works could not provide the desired system performance when dealing with multi-source disturbances. To cope with this situation, composite anti-disturbance control scheme has been developed and successfully applied in many kinds of dynamical systems [32,33,34,35]. However, to the best of our knowledge, this is the first paper to consider the composite control strategy to solve the synchronization problem of complex dynamical networks with multiple disturbances.
Remark 3
Based on the idea of composite control scheme, two synchronization control strategies, namely memoryless and memory controllers, are proposed to the considered complex dynamical networks in Theorems 1 and 2, respectively. In particular, different from the control design of (7), the past states’ information is utilized to enrich the dynamics in the control design of (24). It should be mentioned that the composite memory controller (24) reduces to the composite memoryless controller (7) when the control gain matrix \(K_3=0\). However, the advantages of both control strategies will be illustrated by conducting simulation studies in the following section.
Remark 4
It is commonly known to research communities employing the LMI technique that when considering a large number of decision variables in the proposed synchronization criterion, the computational burden certainly increases and also the required time to solve the criterion is being very large. Therefore, the number of decision variables should be a trade-off between the aforementioned factors. Besides, the computation of results proposed in Sect. 3 is luckily offline. So by making use of the available convex optimization software, it is very easy to solve the established LMI-based synchronization criterion.
Remark 5
The proposed composite synchronization control strategy is more effective in dealing with multi-source disturbances when compared to the traditional \(H_\infty \) control strategy. This will be clearly depicted in Sect. 5. However, this control strategy has the following limitations: (i) the complete information about the states of the network under consideration should be required; (ii) it may not be robust when the network takes into account uncertain parameters. These limitations could be relaxed in our near-future works.
5 Demonstrative examples
Here, two simulation examples are provided to demonstrate the advantage and effectiveness of the theoretical results developed in the preceding section. Moreover, a comparative analysis between the proposed method and the traditional \(H_\infty \) control method is presented, which substantiates the superiority of the method put forward in this paper.
Example 1
Let us consider the complex dynamical network (1) with four identical nodes, and the corresponding system matrices are chosen as follows:
Also the outer-coupling matrix and the measured system output matrix are, respectively, considered as
In this example, the coefficient matrices associated with the exogenous system (2) are taken as follows:
From the above values, it is easy to verify that the pairs (A, B) and \((A_d,BC_d)\) are controllable and observable, respectively.
The nonlinear time-varying function is selected as \(g(x_i(t))=\left[ \begin{array}{c} -0.5x_{i1}(t)+\tanh (0.2x_{i1}(t))+0.2x_{i2}(t) \\ 0.95x_{i2}(t)-\tanh (0.75x_{i2}(t)) \end{array} \right] \) for all \(i=1,2,3,4\), which undoubtedly satisfies the matrices \(U=\left[ \begin{array}{cc} -0.5 &{} 0.2 \\ 0 &{} 0.95 \end{array} \right] \) and \(W=\left[ \begin{array}{cc} -0.3 &{} 0.2 \\ 0 &{} 0.2 \end{array} \right] \).
Further, to check the feasibility of the obtained theoretical results, the remaining parameters’ values are fixed as \(h_1=1\), \(h_2=6.98\), \(\mu =0.4\), \(\kappa =0.4\), \(\gamma =0.9822\), \(\nu _a=0.01\)\((a=1,2)\) and \(\alpha =1\). In what follows, based on the above values, the performance of system (1) with respect to the controllers in (7) and (24) is discussed separately.
Case (i) Performance under the memoryless controller (7)
By resorting to the LMI control toolbox in MATLAB, it can be verified that the established conditions (12) and (13) in Theorem 1 have a feasible solution for the aforementioned parameters’ values. Based on which, the desired control gain matrices are computed as

Closed-loop error trajectories \(e_{x_i}(t)\)\((i=1,2,3,4)\)

Error trajectories \(e_{\delta _i}(t)\,(i=1,2,3,4)\)
To conduct simulation study, the external disturbances acting on system (1) are chosen in Table 1. The initial conditions are randomly selected as \(s(0)=[5 \quad 5]^\mathrm{T}\), \(x_1(0)=[1 \quad -1]^\mathrm{T}\), \(x_2(0)=[2 \quad -2]^\mathrm{T}\), \(x_3(0)=[3 \quad -3]^\mathrm{T}\), \(x_4(0)=[4 \quad -4]^\mathrm{T}\), \(\delta _1(0)=[15 \quad -15]^\mathrm{T}\), \(\delta _2(0)=[-10 \quad 20]^\mathrm{T}\), \(\delta _3(0)=[30 \quad -25]^\mathrm{T}\) and \(\delta _4(0)=[-30 \quad 30]^\mathrm{T}\). Then, under the memoryless controller (7) with the above-obtained gain matrices, the synchronization error trajectories are given in Fig. 1 and the estimation error trajectories of external disturbances are plotted in Fig. 2. From these figures, it is clearly revealed that the trajectories of both error states tend to zero within a satisfactory time interval. Further, to exhibit the efficiency of the designed disturbance observer, the disturbance \(d_i(t)\), its estimation \(\hat{d}_i(t)\) and the estimation error \(d_i(t)-\hat{d}_i(t)\)\((i=1,2,3,4)\) are depicted in Fig. 3. It can be easily observed from this figure that the designed disturbance observer works effectively. Besides that, a comparison result is presented in the sequel, in which the overall system output is compared under the proposed composite control strategy and the traditional \(H_\infty \) control strategy, whose simulations are given in Figs. 4 and 5. After seeing these figures, it can be said that the proposed control strategy has the ability to reject and attenuate the multiple disturbances, whereas the \(H_\infty \) control strategy is not appropriate to deal with the systems affected by multiple disturbances.

Disturbance estimation performance

System output under the proposed method
Case (ii) Performance under the memory controller (24)
In this case, let us consider the same parameters’ values chosen in the previous case. Then, by solving the convex optimization problem formulated in Theorem 2, it is easy to get the following feedback control gain matrices:

System output under the \(H_\infty \) method

Closed-loop error trajectories \(e_{x_i}(t)\)\((i=1,2,3,4)\)

Error trajectories \(e_{\delta _i}(t)\)\((i=1,2,3,4)\)

Disturbance estimation performance
In what follows, the performance of system (1) is examined according to the control law (24) with the new set of gain matrices mentioned above. For this purpose, the initial conditions of associated systems’ states and the external disturbances are taken the same in the previous case. The corresponding simulation results are presented in Figs. 6, 7, 8, 9 and 10. More specifically, Figs. 6 and 7 display the synchronization error trajectories and the estimation error trajectories of external disturbances, respectively, wherein both set of error trajectories converge to zero over a relatively short period of time. As similar to the preceding case, the trajectories of disturbance \(d_i(t)\), its estimation \(\hat{d}_i(t)\) and estimation error \(d_i(t)-\hat{d}_i(t)\)\((i=1,2,3,4)\) are plotted in Fig. 8, where the constructed disturbance observer provides an excellent estimation performance. In this case too, the efficiency of the proposed control strategy is compared with the well-known \(H_\infty \) control strategy and the corresponding graphs are depicted in Figs. 9 and 10. It can be realized from these figures that the control strategy presented in this paper leads to achieving much better performance than the \(H_\infty \) one.

System output under the proposed method

System output under the \(H_\infty \) method
As a conclusion, based on the discussions above, it can be strongly mentioned that the system performance under the composite memory controller is highly better than that under memoryless composite controller. In addition, since the time-varying delay h(t) exists in the considered system (1), the maximum allowable upper bound of \(h_2\) is estimated for different values of \(h_1\) in respect of the aforementioned cases separately, which are listed in Table 2. From these table values, it can be identified that the proposed method via the composite memory control law yields good results than those via the memoryless one. Therefore, it is of great significance to consider the control strategy with memory property for delayed complex dynamical networks as well as time delay systems.
Example 2
In this example, five nodes are considered in the network (1) and each node is viewed as the well-known Chua’s circuit. The dynamics and the system parameters of the Chua’s circuit can be seen in [38] and are given by
where \([x,y,z]\in \mathbb {R}^3\), \(\beta _1=9\), \(\beta _2=14.28\) and the nonlinear function is chosen as \(f(x)=q_2x+0.5(q_1-q_2)(|x+1|-|x-1|)\) with \(q_1=-1/7\) and \(q_2=2/7\). Now the dynamics (29) can be expressed in the compact form as (1) with the following parameters:
and \(g(x_i(t))=0.5(|x_{i1}(t)+1|-|x_{i1}(t)-1|)\) for all \(i=1,2,3,4\), which belongs to the sector [0, 1].
The remaining system matrices of (1) are taken as
The inner- and outer-coupling matrices of the network (1) are, respectively, selected as follows:
Also, the coefficient matrices of the exogenous system (2) are assumed as
In what follows, the results proposed in Theorem 2 are applied to accomplish the synchronization of the network (1). For this, the scalars involved in Theorem 2 are chosen as \(h_1=0.25\), \(h_2=3.2\), \(\mu =0.3\), \(\kappa =0.2\), \(\gamma =0.2\), \(\nu _1=0.1\), \(\nu _2=0.001\) and \(\alpha =1\).
According to the values considered above, the matrix inequalities (13) and (28) are solved under which the disturbance observer and the memory state feedback control gains are obtained as

Synchronization trajectories of \(x_i(t)\)\((i=1,2,3,4,5)\) and s(t)

Disturbance estimation error trajectories \(e_{\delta _i}(t)\)\((i=1,2,3,4,5)\)

Norm of the output of network (1)

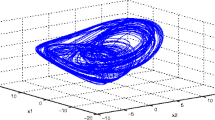
Phase portrait of Chua’s circuit
For the simulation purposes, the initial states’ values are randomly selected as \(s(0)=[-0.2 \quad -0.6 \quad 0.2]^\mathrm{T}\), \(x_1(0)=[-0.1 \quad 0.01 \quad -0.1]^\mathrm{T}\), \(x_2(0)=[0.2 \quad 0.05 \quad 0.1]^\mathrm{T}\), \(x_3(0)\)\(=[-0.2 \quad -0.1 \quad 0.05]^\mathrm{T}\), \(x_4(0)=[0.5 \quad -0.05 \quad -0.2]^\mathrm{T}\) and \(x_5(0)=[-0.3 \quad 0.1 \quad -0.15]^\mathrm{T}\). Further, the external disturbances acting on system (1) are chosen as \(w_i(t)=i/(1+t^2)\) and \(\eta _i(t)=\sin (t)/(i+t^2)\) for \(i=1,2,3,4,5\). Now simulations are carried out under the control law (24) with the obtained gain values. The synchronization trajectories are depicted in Fig. 11, where the entire states of network trace the state of prescribed isolated node within an acceptable time period. Figure 12 provides the error trajectories associated with the disturbance estimation, which shows that the disturbance observer used in this study effectively estimates the disturbances performing in the input port from the beginning itself. To present a comparative analysis between the proposed method and the \(H_\infty \) control method, the trajectories of the network output are plotted in Fig. 13, where it is clearly exhibited that the method proposed in this study is too effective and better than the existing \(H_\infty \) one. In addition, the phase portrait graph of the considered Chua’s circuit is given in Fig. 14 to view its chaotic behavior. Overall, this simulation example confirms the developed theoretical results in this paper.
Remark 6
It is easily observed from the simulation results of Examples 1 and 2 that the composite anti-disturbance control scheme proposed in this paper provides a good flexibility for the system design and significantly improves the control performance when compared with the conventional \(H_\infty \) control scheme. Therefore, the results developed in this paper are more general and superior than those by the existing \(H_\infty \) control method.
6 Conclusion
In this paper, the problem of asymptotic synchronization of delayed coupling complex dynamical networks with multiple disturbances has been investigated by developing a composite control strategy. Based on the Lyapunov–Krasovskii functional method, the required synchronization criteria have been derived by employing the Wirtinger-based integral inequality. Under such criteria, two types of composite control laws have been designed according to the information about considered system states. Two numerical examples with simulation results have been furnished to exhibit the efficiency and superiority of the designed control schemes. It has been revealed from the simulations that the proposed control schemes not only guarantee the asymptotic synchronization of the considered network but also reject one kind of disturbance and attenuate the influence of another disturbance input acting on the control channel. Thus, the developed results in this paper might have some potential benefits from the practical perspectives. As a direction for future work, the control method developed in this paper can be extended to stochastic complex dynamical networks with multiple couplings under the output feedback approach.
References
Cohen, R., Havlin, S.: Complex Networks: Structure, Robustness and Function. Cambridge University Press, New York (2010)
Chen, G., Wang, X., Li, X.: Fundamentals of Complex Networks: Models, Structures and Dynamics. Wiley, Singapore (2015)
Tang, Z., Park, J.H., Lee, T.H.: Topology and parameters recognition of uncertain complex networks via nonidentical adaptive synchronization. Nonlinear Dyn. 85(4), 2171–2181 (2016)
Park, J.H., Lee, T.H.: Synchronization of complex dynamical networks with discontinuous coupling signals. Nonlinear Dyn. 79, 1353–1362 (2015)
Wang, J.L., Wu, H.N., Huang, T.: Passivity-based synchronization of a class of complex dynamical networks with time-varying delay. Automatica 56, 105–112 (2015)
Fang, X., Chen, W.: Synchronization of complex dynamical networks with time-varying inner coupling. Nonlinear Dyn. 85(1), 13–21 (2016)
Lee, S.H., Park, M.J., Kwon, O.M., Sakthivel, R.: Advanced sampled-data synchronization control for complex dynamical networks with coupling time-varying delays. Inf. Sci. 420, 454–465 (2017)
Zhang, R., Zeng, D., Zhong, S., Shi, K., Cui, J.: New approach on designing stochastic sampled-data controller for exponential synchronization of chaotic Lur’e systems. Nonlinear Anal. Hybrid Syst. 29, 303–321 (2018)
Lee, S.H., Park, M.J., Kwon, O.M., Sakthivel, R.: Synchronization for Lur’e systems via sampled-data and stochastic reliable control schemes. J. Frankl. Inst. 354, 2437–2460 (2017)
Selvaraj, P., Sakthivel, R., Kwon, O.M.: Finite-time synchronization of stochastic coupled neural networks subject to Markovian switching and input saturation. Neural Netw. 105, 154–162 (2018)
Zhang, R., Zeng, D., Park, J.H., Liu, Y., Zhong, S.: Quantized sampled-data control for synchronization of inertial neural networks with heterogeneous time-varying delays. IEEE Trans. Neural Netw. Learn. Syst. 29(12), 6385–6395 (2018)
Lee, S.H., Park, M.J., Kwon, O.M.: Synchronization criteria for delayed Lur’e systems and randomly occurring sampled-data controller gain. Commun. Nonlinear Sci. Numer. Simul. 68, 203–219 (2019)
Li, X.J., Yang, G.H.: FLS-based adaptive synchronization control of complex dynamical networks with nonlinear couplings and state-dependent uncertainties. IEEE Trans. Cybern. 46(1), 171–180 (2016)
Shi, C.X., Yang, G.H., Li, X.J.: Event-triggered output feedback synchronization control of complex dynamical networks. Neurocomputing 275, 29–39 (2018)
Li, X.J., Yang, G.H.: Adaptive fault-tolerant synchronization control of a class of complex dynamical networks with general input distribution matrices and actuator faults. IEEE Trans. Neural Netw. Learn. Syst. 28(3), 559–569 (2017)
Selvaraj, P., Sakthivel, R., Kwon, O.M.: Synchronization of fractional order complex dynamical network with random coupling delay, actuator faults and saturation. Nonlinear Dyn. 94(4), 3101–3116 (2018)
Chen, W.H., Jiang, Z., Lu, X., Luo, S.: \(H_\infty \) synchronization for complex dynamical networks with coupling delays using distributed impulsive control. Nonlinear Anal. Hybrid Syst. 17, 111–127 (2015)
Yang, H., Wang, X., Zhong, S., Shu, L.: Synchronization of nonlinear complex dynamical systems via delayed impulsive distributed control. Appl. Math. Comput. 320, 75–85 (2018)
Liu, Y., Guo, B.Z., Park, J.H., Lee, S.M.: Nonfragile exponential synchronization of delayed complex dynamical networks with memory sampled-data control. IEEE Trans. Neural Netw. Learn. Syst. 29(1), 118–128 (2018)
Wang, X., Liu, X., She, K., Zhong, S.: Pinning impulsive synchronization of complex dynamical networks with various time-varying delay sizes. Nonlinear Anal. Hybrid Syst. 26, 307–318 (2017)
Tang, Z., Park, J.H., Feng, J.: Novel approaches to pin cluster synchronization on complex dynamical networks in Lur’e forms. Commun. Nonlinear Sci. Numer. Simul. 57, 422–438 (2018)
Wang, X., Park, J.H., Zhong, S., Yang, H.: A switched operation approach to sampled-data control stabilization of fuzzy memristive neural networks with time-varying delay. IEEE Trans. Neural Netw. Learn. Syst. (2018). https://doi.org/10.1109/TNNLS.2019.2910574
Wu, Z.G., Shi, P., Su, H., Chu, J.: Sampled-data exponential synchronization of complex dynamical networks with time-varying coupling delay. IEEE Trans. Neural Netw. Learn. Syst. 24(8), 1177–1187 (2013)
Li, Z.X., Park, J.H.: Sampling-interval-dependent synchronization of complex dynamical networks with distributed coupling delay. Nonlinear Dyn. 78, 341–348 (2014)
Kaviarasan, B., Sakthivel, R., Lim, Y.: Synchronization of complex dynamical networks with uncertain inner coupling and successive delays based on passivity theory. Neurocomputing 186, 127–138 (2016)
Park, M.J., Lee, S.H., Kwon, O.M., Seuret, A.: Closeness-centrality-based synchronization criteria for complex dynamical networks with interval time-varying coupling delays. IEEE Trans. Cybern. 48(7), 2192–2202 (2018)
Yao, J., Deng, W.: Active disturbance rejection adaptive control of uncertain nonlinear systems: theory and application. Nonlinear Dyn. 89(3), 1611–1624 (2017)
Li, S., Yang, J., Chen, W.H., Chen, X.: Disturbance Observer-Based Control: Methods and Applications. CRC Press, Boca Raton (2014)
Zhang, S., Wang, Z., Ding, D., Shu, H.: \(H_\infty \) fuzzy control with randomly occurring infinite distributed delays and channel fadings. IEEE Trans. Fuzzy Syst. 22(1), 189–200 (2014)
Wei, Y., Zheng, W.X., Xu, S.: Anti-disturbance control for nonlinear systems subject to input saturation via disturbance observer. Syst. Control Lett. 85, 61–69 (2015)
Chen, W.H., Ding, K., Lu, X.: Disturbance-observer-based control design for a class of uncertain systems with intermittent measurement. J. Frankl. Inst. 354, 5266–5279 (2017)
Yao, X., Guo, L.: Composite anti-disturbance control for Markovian jump nonlinear systems via disturbance observer. Automatica 49, 2538–2545 (2013)
Li, Y., Sun, H., Zong, G., Hou, L.: Composite anti-disturbance resilient control for Markovian jump nonlinear systems with partly unknown transition probabilities and multiple disturbances. Int. J. Robust Nonlinear Control 27, 2323–2337 (2017)
Wei, X., Sun, S.: Elegant anti-disturbance control for discrete-time stochastic systems with nonlinearity and multiple disturbances. Int. J. Control 91(3), 706–714 (2018)
Liu, Y., Wang, H., Guo, L.: Composite robust \(H_\infty \) control for uncertain stochastic nonlinear systems with state delay via a disturbance observer. IEEE Trans. Autom. Control 63(12), 4345–4352 (2018)
Seuret, A., Gouaisbaut, F.: Wirtinger-based integral inequality: application to time-delay systems. Automatica 49, 2860–2866 (2013)
Corless, M., Tu, J.: State and input estimation for a class of uncertain systems. Automatica 34(6), 757–764 (1998)
Yalcin, M.E., Suykens, J.A.K., Vandewalle, J.: Master-slave synchronization of Lur’e systems with time-delay. Int. J. Bifurc. Chaos 11(6), 1707–1722 (2001)
Acknowledgements
This research was supported by the Brain Research Program through the National Research Foundation of Korea(NRF) funded by the Ministry of Science, ICT and Future Planning (NRF-2017M3C7A1044815). This research was also supported by the Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science and Technology (NRF-2019R1I1A3A02058096). The work of Myeong-Jin Park was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT; Ministry of Science and ICT) (NRF-2017R1C1B5076878).
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kaviarasan, B., Kwon, O.M., Park, M.J. et al. Composite synchronization control for delayed coupling complex dynamical networks via a disturbance observer-based method. Nonlinear Dyn 99, 1601–1619 (2020). https://doi.org/10.1007/s11071-019-05379-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-019-05379-7