
Abstract
In this paper, the problem of robust synchronization of fractional-order multi-weighted complex dynamical networks in the presence of time-varying coupling delay and disturbances is studied via fractional-order equivalent-input-disturbance (FOEID) estimator-based non-fragile feedback control scheme. Precisely, FOEID-based disturbance estimator is incorporated in the feedback control input to compensate the disturbance effect in the resulting closed-loop system, which removes the disturbance effect without any prior knowledge of it. By utilizing FOEID method and synchronization error dynamics, the synchronization problem of fractional-order complex dynamical network is transformed into the stability problem of the augmented form of the closed-loop error system. Based on the Lyapunov stability theory, fractional calculus theory and some advanced integral inequalities, a novel set of sufficient conditions is established to ensure the robust asymptotic stability of the augmented error system subject to time-varying delay and disturbances. Finally, two numerical examples including a comparison study are given to illustrate the obtained theoretical results and the control design.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
During the recent few years, the research on complex dynamical networks (CDNs) has gained tremendous attention from research communities since it can be successfully applied to analyse various kinds of natural and artificial systems, such as world wide web, electric power grids, image processing, secure communication and mobile networks [1,2,3,4,5,6,7,8]. The general framework of CDNs is that a collection of large number nodes connected through a topological network, in which each node is evolving according to its respective dynamical equation and some of these nodes are normally coupled as per the network topology. Many beneficial results on CDNs are available in the recent literature to show their usefulness and potential requirements in practice [9,10,11,12,13,14,15,16,17]. Specifically, global synchronization is one of the important hot research topics in the study of CDNs, in which distributed control policies are developed based on local information of CDNs that enable to synchronize the dynamic behaviours of each node in CDNs with the isolated node on certain quantities of interest [18]. In [19], with the use of the developed adaptive control law, a new set of sufficient conditions was developed to ensure the global output synchronization of the CDNs. In [20], some sufficient conditions for synchronization of CDNs with time delays were established by using the passivity theory and sampled-data control technique. On the other hand, many real-time networks, such as social networks, communication networks and transportation networks are described by multi-weighted CDNs, where the nodes are connected by more than one weight. For example, people can contact others by multiple ways, such as mobile phone, Facebook, e-mail, Skype, WhatsApp, Instagram, Twitter and so on, consider that every contact information has different weights, so human connection network is a complex network with multi-weights. According to the method of the network split, complex network with multi-weights is split into several different single weighted complex networks by different nature of the network weights. There are a lot of different characteristics between complex networks with multi-weights and complex dynamical networks with single weight. Therefore, the synchronization problem of multi-weighted CDNs (MWCDNs) has attracted increasing interest in recent years [21, 22], which is one of the motivations of the present study.
On the other hand, the fractional-order systems have been widely utilized in several fields of engineering and science due to its lower order, less parameters and higher accuracy. That is, the fractional-order systems give a complete description compared to the integer-order systems [23]. As a result, until the recent decades, fractional-order calculus has become one of the hottest topics in many network fields of science and engineering [24,25,26,27,28,29,30,31,32,33]. In [27], the authors investigated the stabilization problem for fractional-order neural networks with discrete and distributed delays via LMI-based approach. However, because of the increasing complexity of the fractional-order CDNs, it is not easy to ensure the accuracy and stability of a system. So, it is necessary to develop a more reliable optimization algorithm for the study of the fractional-order system. In addition, considering the complexity and the high dimension of a fractional-order CDNs, it is very hard to obtain the accurate state information of the system. To answer these problems, the many state estimation techniques exist for fractional-order systems during the recent few years and some remarkable works are reported in [34,35,36]. In [34], the authors investigated the state estimation problem for fractional-order memristive system with the aid of Lyapunov stability theory and non-fragile control approach. Moreover, the problem of robust global synchronization of fractional-order complex dynamical networks (FOCDNs) with decentralized coupling has been discussed in [31], where an adaptive control scheme has been proposed to obtain the required theoretical result. In [32], the robust synchronization problem for fractional-order complex-valued neural networks subject to time-varying delays has been analysed by using Lyapunov-like function method, where the designing laws ensure the synchronization of the neural networks.
As we know, in the process of controller implementation in many practical systems, it is difficult or even not possible to find accurate controller because of the existence of some inevitable uncertainties in the design parameters. In addition, it is shown that the vanishingly small perturbations in controller parameters could even destabilize the dynamical control system [37,38,39]. Hence, it is necessary to design a controller that tolerates only the uncertainties and disturbance in the system. This motivates the study of non-fragile control problems in many networked systems in the recent decades [40,41,42,43]. In addition, disturbances arise in many practical problems in mechanical, robotics, biological, economical and medical systems which may induce an adverse effect on system stability. Therefore, it is practically more significant to design a controller with disturbance rejection ability. Also, many researchers have already used various robust control methods to simplify the disturbance of the dynamical systems effect in previous studies, such as the dissipative control [44], disturbance observer [45], active disturbance rejection control [46] and equivalent-input-disturbance (EID) estimator design [47]. Among them, the EID-estimator method proposed in [48] is a highly attractive and effective one, which improves the disturbance rejection performance of a servo system due to its simple structure. In particular, the EID-estimator method is a useful tool for the practical control system since it can reject not only an external disturbance but also deal with parameter variations without any prior knowledge of them. Recently, there have been significant works on EID-based control systems [49, 50].
Motivated by the above discussions, we shall study, in this paper, the problem of robust synchronization for a class of multi-weighted FOCNDs in the presence of disturbance and time-varying delay. Compared with current research achievements, major contributions of this paper are presented as follows:
-
1.
In this work, as a first attempt, a FOEID-based non-fragile feedback controller is designed for FOMWCDNs, which involves not only the external disturbances but also multi-weighted coupling delays.
-
2.
By combining the Lyapunov–Krasovskii functional approach, fractional calculus theory and EID approach, a new set of sufficient conditions in the form LMIs are developed for the robust synchronization.
-
3.
A novel effective control algorithm for selecting the gain matrices for the controllers and observers is developed which ensures the synchronization of FOMWCDNs with disturbance rejections.
-
4.
The proposed FOEID-based control law is easy to implement since it has a significant amount of parameters that can be easily tuned via a simple algebraic structure.
Finally, two numerical examples including comparison study are given to demonstrate the effectiveness of the dynamic non-fragile synchronization control scheme proposed in this paper. The rest of this paper is organized as follows. System description and preliminaries are provided in Sect. 2. In Sect. 3, an LMI-based synchronization criterion and non-fragile controller design algorithm are developed. A simulation verification is illustrated to show the validity and superiority of the proposed method in Sect. 4, and a conclusion follows in Sect. 5
Notations Throughout this paper, the superscripts “T” and “\((-\,1)\)” stand for matrix transposition and matrix inverse, respectively. \({{\mathbb {R}}^n}\) denotes the n-dimensional Euclidean space. \({\mathbb {R}^{n\times n}}\) denotes the set of all \(n\times n\) real matrices. \(P > 0\) (respectively, \(P<0\)) means that P is positive definite (respectively, negative definite). \({\mathcal {I}}\) and 0 represent identity matrix and zero matrix with compatible dimensions. In symmetric block matrices or long matrix expressions, we use an asterisk (\(*\)) to represent a term that is induced by symmetry. diag\(\{.\}\) stands for a block-diagonal matrix. \({\Vert }\cdot {\Vert }\) refers to the Euclidean vector norm.
2 System description and preliminaries
In this section, first we define the Riemann–Liouville derivative and then discuss the construction of FOEID-based synchronization control design by employing fractional-order low-pass filter and fractional-order Luenberger-type state observer.
Definition 1
[51] The Riemann–Liouville derivative of a continuous function \(f : [t_0,\ t] \rightarrow \mathbb {R}\) is defined by:
where \(\alpha \) denotes the fractional order and \(\varGamma (\cdot )\) denotes the Gamma function defined by \(\varGamma (\alpha )=\int _0^\infty e^{-z}z^{\alpha -1}\mathrm{d}z\).
Consider the following fractional-order multi-weighted complex dynamical network (FOMWCDN) consisting of N identical nodes with unknown disturbance in the following form:
where \( x_i(t)\in \mathbb {R}^n\), \(u_i(t) \in \mathbb {R}^m \), \( y_i(t)\in \mathbb {R}^p\) and \(\omega _i(t)\in \mathbb {R}^{n_d}\) are the state, control input, measured output and external disturbance of the ith node, respectively; \(0<\alpha <1\) is the fractional order; \(f:\mathbb {R}^+\times \mathbb {R}^n\rightarrow \mathbb {R}^l\) is an unknown continuous nonlinear vector-valued function, which satisfies sector bounded constraint; \(\phi _i(t_0)\) is the continuous initial vector function; A, B, C, D and E are known constant matrices with appropriate dimensions; \(\tau (t)\) is the time-varying delay function satisfying \(0\le \tau _1\le \tau (t) \le \tau _2\) and \({\dot{\tau }}(t)\le \mu <1\); \(a_r\in \mathbb {R}^+\) and \({\tilde{a}}_r\in \mathbb {R}^+\ (r=1,2,\ldots ,q)\) denote the coupling strength of the rth coupling form; \(\varGamma _r \in \mathbb {R}^{n\times n}\) and \({\tilde{\varGamma }}_r \in \mathbb {R}^{n\times n}\ (r=1,2,\ldots ,q)\) represent the positive diagonal inner coupling matrices of the rth coupling form; \(G^r = [G_{ij}^r ]_{N\times N}\) and \({\tilde{G}}^r = [{\tilde{G}}_{ij}^r ]_{N\times N}\) denote the outer coupling configuration matrices of the rth coupling form, where the non-diagonal elements of \(G_r \) and \({\tilde{G}}_r\) satisfy the conditions if there is a connection between node i and node j, then \(G_{ij}^r > 0\) and \({\tilde{G}}_{ij}^r > 0;\) otherwise, \(G_{ij}^r= 0\) and \({\tilde{G}}_{ij}^r=0\)\(( i\ne j )\), and the diagonal elements of matrices \(G^r\) and \({\tilde{G}}^r\) are defined by \(G_{ii}^r=-\sum \nolimits _{j=1, \ j\ne i}^{N}G_{ij}^r\) and \({\tilde{G}}_{ii}^r=-\sum \nolimits _{j=1,\ j\ne i}^{N}{\tilde{G}}_{ij}^r\)\((i=1,2,\ldots ,N \quad \text{ and }\quad r=1,2,\ldots ,q)\).
Here, the nonlinear function in the system satisfies the following assumption:
Assumption 1
For any \(x(t)\in \mathbb {R}^n\), the nonlinear vector function f(x(t)) satisfies \(||f(x(t))||\le \Vert {\mathcal {G}}x(t)\Vert , \forall t\), where \({\mathcal {G}}\) is the known real constant diagonal matrix.
Furthermore, to develop the synchronization criteria, it is assumed that in the system (1), (A, C, E) is controllable, observable and has no zeros on the imaginary axis. In order to estimate and reject the unknown exogenous disturbance effect in the control system, we employ FOEID-based control approach. Then, the original system (1) is represented by the following equivalent system model:
where \(i=1,2,\ldots , N\) and \(\omega _{ie}(t)\) is equivalent-input-disturbance. Let s(t) be a solution to the isolated node for the synchronization of CDNs (1) and its dynamics are described as \({t_0} D^\alpha _t s(t)=As(t)+Bf(s(t))\). Further, to estimate the actual disturbance, the multi-weighted CDNs (2) are connected with the following fractional-order Luenberger-type state observer:
where \({\hat{x}}_i(t)\in \mathbb {R}^n\), \(u_{if}(t)\in \mathbb {R}^m \) and \({\hat{y}}_i(t)\in \mathbb {R}^p\) represent the state, control input and the output of the ith observer node, respectively; and \(L\in \mathbb {R}^{p\times n}\) is the observer gain matrix to be determined. Further, let us define the errors of state estimation and synchronization of ith node as \(\nabla x_i(t)= x_i(t)-{\hat{x}}_i(t)\) and \(e_i(t)=x_i(t)-s(t)\), respectively. Further, according to the system (2) and its observer system (3), the estimate of EID can be expressed as follows [48]:
where \(C^+\) is the pseudo inverse of C. However, it cannot be directly used to formulate control law. The EID-based robust control strategy [48] adopts an estimation of this signal based on the assumption that a signal can be approximated and estimated using a filter with the appropriate bandwidth. For example, if the filter has a wide enough bandwidth, the EID is able to accurately and quickly estimate the unknown disturbance term \(\omega _{ie}(t)\). Therefore, the estimated disturbances are passed through a fractional-order low-pass filter F(s) with cut-off frequency \(\omega _f\). Moreover, the low-pass filter satisfies \(F(j\omega )\approx 1,\ \forall \omega \in [0, \omega _{m}]\), where \(\omega _{m}\) denotes the highest angular frequency, which is usually chosen as five time smaller than \(\omega _f\). The state-space representation of the fractional-order low-pass filter is given by
where \(x_{iF}(t)\) is the filter state of the ith node; \(A_F\), \(B_F\) and \(C_F\) are filter coefficient matrices; \({\tilde{\omega }}_i(t)\) represents the filtered disturbance estimate of the ith node. The filtered disturbance estimate together with the control input \(u_{if}(t)\) yields the following improved control law [50]
Further, the non-fragile feedback control input is chosen as follows: \( u_{if}(t)={\bar{K}}({\hat{x}}_i(t)- s(t))\), where \({\bar{K}}=K+\Delta K(t)\), K is the feedback controller gain matrix which to be determined in the forthcoming section, \(\Delta K(t)\) denotes the possible control gain variations with the structure \(\Delta K(t)=\mathbb {M}\Delta (t)\mathbb {N}\), where \(\mathbb {M}\) and \(\mathbb {N}\) are known real constant matrices and \(\Delta (t)\) is an unknown time-varying matrix satisfying \(\Delta ^{\mathrm{T}}(t)\Delta (t)\le I\).
By employing (4) and (6), the fractional-order filter dynamics (5) can be expressed as follows:
From (1)–(7), we can easily obtain the following dynamical system equations:
where \({\bar{f}}(\nabla x_i(t))=f(x_i(t))-f({\hat{x}}_i(t))\) and \({\bar{g}}(e_i(t))=f(x_i(t))-f(s(t))\).
According to the EID approach [50], the disturbance estimation of the closed-loop system is irrelevant to exogenous signals. Therefore, we may set the external disturbance as \(\omega (t)=0\). By defining \(\xi _i(t)=[x^{\mathrm{T}}_{iF}\ {\hat{x}}_i^{\mathrm{T}}(t)\ \nabla x_i(t) \ e_i^{\mathrm{T}}(t) ]^{\mathrm{T}}\), \({\mathcal {F}}(\xi _i(t))=[0\ f^{\mathrm{T}}({\hat{x}}_i(t)) \ {\bar{f}}^{\mathrm{T}}(\nabla x_i(t)) \ {\bar{g}}^{\mathrm{T}}(e_i(t))]^{\mathrm{T}}\) and combining (7)–(10), and the virtue of Kronecker product, we can obtain the augmented fractional-order system as follows:
with \( {\mathcal {A}}=(I\otimes A_F)+(I\otimes B_FC_F)\), \({\mathcal {B}}=(I\otimes B_FC^+LE)\), \({\mathcal {L}}=(I\otimes LE)\), \({\mathcal {K}}=(I\otimes CK)\), \({\mathcal {C}}=(I\otimes CC_F)\), \( \varPi =(I\otimes A)+\sum \nolimits _{r=1}^{q}a_r(G^r\otimes \varGamma _r)\), \( {\mathcal {M}}=(I\otimes C\mathbb {M}\Delta (t)\mathbb {N}) \), \( {\tilde{\varPi }}=\sum \nolimits _{r=1}^{q}{\tilde{a}}_r({\tilde{G}}^r\otimes {\tilde{\varGamma }}_r)\), \(\xi (t)=[\xi _1^{\mathrm{T}}(t),\xi _2^{\mathrm{T}}(t),\ldots ,\xi _N^{\mathrm{T}}(t)]^{\mathrm{T}}\) and \({\mathcal {F}}(\xi (t))=[{\mathcal {F}}^{\mathrm{T}}(\xi _1(t)),{\mathcal {F}}^{\mathrm{T}}(\xi _2(t)),\ldots , {\mathcal {F}}^{\mathrm{T}}(\xi _N(t))]^{\mathrm{T}}\).

Configuration of EID-based non-fragile controller
Furthermore, the block diagram of the overall closed-loop control system configuration is shown in Fig. 1. To derive the required theoretical result, we impose the following lemma:
Lemma 1
[52] The fractional-order nonlinear differential equation \(t_0 D^\alpha _t x(t)=f (x(t))\) can be written as
where \({\mathcal {Y}}(w,t)\) is the infinite-dimensional distributed state variable, w is the elementary frequency, and \(\zeta (w)=\frac{\sin (\alpha \pi )}{\pi }w^{-\alpha }\).
Remark 1
In particular, many real-world network model-based systems such as complex biological networks, transportation networks, communication networks and social networks can be described by multi-weighted CDNs, in which the nodes are coupled by multiple coupling forms. Nevertheless, in the literature only a few researchers have studied the synchronization problem of CDNs with multi-weights [21, 22]. As far as we know, this is the first work which discusses about the multi-weighted fractional-order model CDNs with external unknown disturbances, directed communications, with and without delayed multiple coupling forms.
Remark 2
In general, due to the effect of some abrupt environmental disturbances in the design of control parameters will not be avoided. Thus, it is necessary to consider uncertainty for EID-based non-fragile controller. It is worth mentioning that such a description is considered for EID-based synchronization of multi-weighted FOCDNs for the first time. Hence, it is very important to further investigate the synchronization of multi-weighted FOCDNs. Specifically, the inner coupling matrices \(\varGamma _r\) and \({\tilde{\varGamma }}_r\) may change in the links such as breaking, recovering and coupling strength occasionally due to the internal or external factors, which may affect synchronization of FOCDNs.
Remark 3
It should be mentioned that this paper investigates roust synchronization problem for fractional-order multi-weighted complex dynamical networks in the presence of time-varying coupling delay and disturbance via Lyapunov stability theory. For time-delay systems, calculating the fractional derivative of delay dependant Lyapunov function is not easy. To overcome this difficulty, the frequency distributed fractional integrator equivalent model transformation is formulated for the considered fractional-order system. To make such equivalent fractional integrator transformation R–L fractional-order derivative is better choice. Thus, in this study, to avoid the incorporation of the fractional derivative in the Lyapunov functions, we adopt the R–L fractional-order derivative instead of the Caputo fractional derivative.
3 Stochastic finite-time boundedness criterion
In this section, a novel fractional EID-based non-fragile control design is established to ensure the robust synchronization of the considered FOMWCDN (1). In order to solve the synchronization issue of FOMWCDN (1) to the isolated node s(t), it is enough to establish the asymptotic stability for the closed-loop augmented system (11). In the derivation procedure, a new criterion is established in terms of linear matrix inequalities (LMIs) for the robust EID-based non-fragile controller (6) for the network model under consideration.
Theorem 1
Consider the fractional-order augmented system (11) with Assumption 1. For the given gain matrices K, L and a positive scalars \(\tau _1\), \(\tau _2\), \(\mu \), \(\delta \), the considered system (11) is robustly asymptotically stable, if there exist symmetric matrices \(P>0\), \(Q_p>0\)\((p=1,2,3)\), \(R_z>0\)\((z=1,2)\) and a positive scalar \(\epsilon \) such that the following matrix inequality holds:
where
and the remaining parameters of \(\varOmega _{a,b}\) are zero.
Proof
By applying Lemma 1, the fractional-order augmented system (11) can be rewritten as follows:
where \({\mathcal {Y}}(w,t)=[{\mathcal {Y}}_1(w,t), \ {\mathcal {Y}}_2(w,t), \ \cdots \ {\mathcal {Y}}_{n}(w,t)]^{\mathrm{T}}\).
Then, we choose the Lyapunov function for the system (13) as \(\upsilon (w,t)={\mathcal {Y}}^{\mathrm{T}}(w,t)(I \otimes P){\mathcal {Y}}(w,t)\), where \((I \otimes P)=\text{ diag }\{(I \otimes P_1),(I \otimes P_2),\frac{1}{\delta }(I \otimes P_2),(I \otimes P_2)\}\) is a positive symmetric matrix. This function is called as the monochromatic Lyapunov function corresponding to the elementary frequency w. Based on \(\upsilon (w,t)\), we construct the global monochromatic Lyapunov function for the system (13) we have
This Lyapunov function integrates all the monochromatic \(\upsilon (w,t)\) with a weighting function \(\zeta (w)\) on the whole spectral range. Further, we select some additional Lyapunov–Krasovskii functional candidates to incorporate time-delay information as follows:
where \(Q_p=\text{ diag }\{Q_{p1},Q_{p2},Q_{p3},Q_{p4}\}\)\((p=1,2,3)\) and \(R_z=\text{ diag }\{R_{z1},R_{z2},R_{z3},R_{z4}\}\)\((z=1,2)\) are positive symmetric matrices. Let \(\ V(\xi (t))=V_1(\xi (t))+V_2(\xi (t))+V_3(\xi (t))\). Now, by calculating the time derivative of \(V(\xi (t))\) along the solution trajectories of (11) and (13) as
Further, by applying Jensen’s single integral inequality [53] to the integral terms in equation (16), we can get the following inequalities:
Moreover, according to Assumption 1, we can obtain the following inequality
Thus, by combining Eqs. (14)–(19) and taking mathematical expectation, it can be obtained that
where \( \chi (t)=\Big [\xi ^{\mathrm{T}}(t) \quad \xi ^{\mathrm{T}}(t-\tau _1)\)\(\xi ^{\mathrm{T}}(t-\tau (t))\)\(\xi ^{\mathrm{T}}(t-\tau _2)\)\({\mathcal {F}}^{\mathrm{T}}(\xi (t)) \quad \int _{t-\tau _1}^{t}\xi ^{\mathrm{T}}(s)\mathrm{d}s \quad \int _{t-\tau _2}^{t-\tau _1}\xi ^{\mathrm{T}}(s)\mathrm{d}s\Big ]^{\mathrm{T}} \) and the elements of \(\varOmega _{a,b}\), \(\vartheta \) and \(\upsilon \) are defined in the theorem statement. Moreover, based on Lemma 2 in [53], for any positive scalar \(\epsilon \), the right-hand side of (20) can equivalently be written as
Based on the Schur complement, it is noted that (21) is equivalent to the left-hand side of (12). Thus, it can be observed that \({\dot{V}}(\xi (t))<0\) if the LMI (12) holds. This completes the proof of the theorem. \(\square \)
It is worthy to mention that if the control gain matrices are unknown, then the constraint in (12) cannot be solved directly via MATLAB LMI control toolbox due to the existence of nonlinear terms. To resolve this problem, we implement congruence transformation onto the obtained conditions in the above theorem. The following theorem provides the required LMI constraints to obtain the feedback control gain matrices.
Theorem 2
Consider the multi-weighted FOCDNs (1) with the assumption that the singular value decomposition of the output matrix E with full row rank is \(E=U[S\quad 0]V^{\mathrm{T}}\), where U and V are unitary matrices and S is a semi-positive definite matrix. For given positive scalars \(\tau _1\), \(\tau _2\), \(\mu \), \(\delta \), the considered fractional-order augmented system (1) is robustly synchronized under the state feedback controller (6), if there exist symmetric matrices \(X_1>0\), \(X_2>0\), \({\hat{Q}}_{p}>0\)\((p=1,2,3)\), \({\hat{R}}_{z}>0\)\((z=1,2)\), any matrices Y, \(\mathbb {W}\) with appropriate dimensions and a positive scalar \(\epsilon \) such that the below LMI conditions are satisfied:
where
with \({\hat{\varPhi }}_1=\begin{bmatrix} \hat{{\mathcal {A}}}&0&\hat{{\mathcal {B}}}&0\\ 0&{\mathcal {E}}&\hat{{\mathcal {H}}}_1&\hat{{\mathcal {T}}}_2 \\ -\hat{{\mathcal {C}}}&0&\hat{{\mathcal {H}}}_2&0\\ -\hat{{\mathcal {C}}}&0&-\hat{{\mathcal {T}}}_1&{\mathcal {E}}+\hat{{\mathcal {T}}}_2\\ \end{bmatrix}\)\({\hat{\varPhi }}_2=\begin{bmatrix} 0&0&0&0\\ 0&\hat{{\mathcal {U}}}_1&0&0\\ 0&0&\hat{{\mathcal {U}}}_2&0\\ 0&0&0&\hat{{\mathcal {U}}}_1 \end{bmatrix}\), where \(\hat{{\mathcal {A}}}=(I\otimes A_FX_1)+(I\otimes B_FC_FX_1)\), \(\hat{{\mathcal {B}}}=(I\otimes \delta B_FC^+\mathbb {W}E)\), \(\hat{{\mathcal {C}}}=(I\otimes CC_FX_1)\), \({\mathcal {E}}=(I\otimes \varPi X_2)\), \(\hat{{\mathcal {H}}}_1=(I\otimes \delta \mathbb {W}E)-(I\otimes \delta CY)\), \(\hat{{\mathcal {H}}}_2=(I\otimes \delta \varPi X_2)-(I\otimes \delta \mathbb {W}E)\), \(\hat{{\mathcal {T}}}_1=(I\otimes \delta CY)\), \(\hat{{\mathcal {T}}}_2=(I\otimes CY)\), \(\hat{{\mathcal {U}}}_1=(I\otimes {\tilde{\varPi }} X_2)\), \(\hat{{\mathcal {U}}}_2=(I\otimes {\tilde{\varPi }} \delta X_2)\) and the remaining parameters of \({\hat{\varOmega }}_{a,b}\) are zero. Moreover, the control design parameters can be obtained by the following relations: \(K =YX_2^{-1}\) and \(L=\mathbb {W}US{\bar{X}}_{11}^{-1}S^{-1}U^{\mathrm{T}}\).
Proof
In order to prove this theorem, first, consider the following linear congruence transformations: \(X=P^{-1}\), \(X=\text{ diag }\{X_1,X_2,\delta X_2,X_2\}\), \({\hat{Q}}_{p}=XQ_pX\)\((p=1,2,3)\) and \({\hat{R}}_z=XR_zX\)\((z=1,2)\). Then, pre- and post-multiplying the constraint (12) in Theorem 1 by \(\text{ diag }\{\underbrace{(I\otimes X),\ldots ,(I\otimes X)}_{4},(I \otimes I),(I \otimes X),(I \otimes X),(I \otimes I),(I \otimes I)\}\) and its transpose, respectively, and using Schur complement, it is easy to obtain the LMI in (22), where the term \(EX_2\) can be written as \({\bar{X}}_2E\), where \({\bar{X}}_2=U\mathbb {S}X_{11}^{-1}\mathbb {S}^{-1}U^{\mathrm{T}}\) with the aid of Lemma 1 in [54]. This completes the proof of the theorem. \(\square \)
Remark 4
It should be noted that most of the existing results in the literature dealt with EID technique only for the integer-order systems (see [47,48,49] and references therein). The proposed EID approach extends to the fractional-order systems for obtaining the synchronization along with non-fragile controller. Moreover, in [51], the observer-based robust control has been developed in the presence of uncertainties in control gain matrices. The main advantage of the proposed design is that it does not require any prior knowledge about the disturbance and also it is suitable for many real-time problems with multi-weighted coupling delays.
Remark 5
In recent years, many of the researchers have investigated the synchronization of CDNs through various control approaches, for instance see [1,2,3,4,5]. However, very few researchers only have concentrated on the design of non-fragile controller for achieving synchronization of CDNs (see Refs. [41, 42]). In many practical applications, the parameter perturbations are unavoidable which influence stability and performance of the system if they are not treated appropriately. In order to handle this problem, the non-fragile control design is required. Nevertheless, the design of non-fragile controller for synchronization of CDNs with multi-weights has not been fully considered. The main aim of this paper is to construct an EID-based non-fragile controller for robust synchronization of FOMWCDNs subject to time-varying coupling delays.
4 Simulation verifications
In this section, numerical examples with simulations are given for demonstrating the effectiveness and superiority of the proposed controller. First, we present the synchronization and disturbance estimation performance of the developed control design in Example 1. Further, in Example 2, the system parameters are borrowed from [55] and compared the superiority of the proposed FOEID-based controller with the observer-based controller method developed in [55].

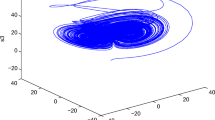
State trajectories of complex network (1) with FOEID estimator

State trajectories of complex network (1) without FOEID estimator
Example 1
Consider the time-delayed FOMWCDNs (1) with four nodes and three coupling weights and its parameters are taken as follows: \(\alpha =0.8,\)\(A=\begin{bmatrix}-\,5&\quad 2\\ -\,2&\quad -\,3 \end{bmatrix}\), \(B=\begin{bmatrix}0.1&\quad 0 \\ 0&\quad 0.1\end{bmatrix}, \ C=D=\begin{bmatrix} 1\\ 1\\ \end{bmatrix},\)\( E=\begin{bmatrix}1&2 \end{bmatrix},\ a_1=5,\ a_2=4, \ a_3=8,\ {\tilde{a}}_1=3,\ {\tilde{a}}_2=4,\ {\tilde{a}}_3=2,\)\(\varGamma _1=\text{ diag }\{0.8,0.5\},\ \varGamma _2=\text{ diag }\{0.6,0.5\},\ \varGamma _3=\text{ diag }\{0.2,0.4\},\)\({\tilde{\varGamma }}_1=\text{ diag }\{0.3,0.1\},\ {\tilde{\varGamma }}_2=\text{ diag }\{0.4,0.5\}\) and \({\tilde{\varGamma }}_3=\text{ diag }\{0.1,0.3\}\). The inner coupling matrices are chosen as follows:
Further, the nonlinear function is taken as \(f(x_i(t))=\begin{bmatrix} 0.01\tanh (x_{i1}(t)) \\ 0.01\tanh (x_{i2}(t)) \end{bmatrix}\) and according to Assumption 1, we obtain \({\mathcal {G}}=\text{ diag }\{0.01,0.01\}\). The time-varying delay is taken as \(\tau (t)=0.50+0.50\sin (t)\) from which it can be obtained that \(\tau _1=0\), \(\tau _2=1\) and \(\mu =0.5\). The low-pass filter parameters are selected as \(A_F=-51{\mathcal {I}},\ B_F=50{\mathcal {I}}\) and \(C_F={\mathcal {I}}\). The uncertain parameters of the non-fragile controller \(u_{if}\) are taken as \( \mathbb {M}=\begin{bmatrix} 0.1&0.1 \end{bmatrix}, \ \mathbb {N}=\begin{bmatrix} 0.2&0.2 \\ 0.1&0.1 \end{bmatrix} \) and \(\Delta (t)=\sin (t)\). In addition, by taking \(\delta =1\times 10^{-6}\), and by solving the LMI (22) in Theorem 2 via MATLAB LMI toolbox, it can be found that LMI (22) has a feasible solution, and the corresponding gain matrices of controller and observer are given by \(K=[-\,0.2215\quad -\,0.7648]\) and \( L=[141.4010\quad 285.2104]^{\mathrm{T}}.\)

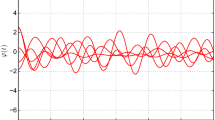
State trajectories of \(e_{i}(t)\)\((i=1,2,3,4)\) with FOEID estimator

State trajectories of \(e_{i}(t)\)\((i=1,2,3,4)\) without FOEID estimator

Control responses of \(u_{i}(t)\)\((i=1,2,3,4)\) with and without FOEID estimator

External disturbances and their estimation
For the simulation purposes, the external disturbances are selected as follows:
and the initial conditions for the states of nodes, the observer of nodes and the isolated node are, respectively, chosen as follows: \(x_1(0)=[-\,2\quad -\,5]^{\mathrm{T}}\), \(x_2(0)=[-\,5\quad 4]^{\mathrm{T}}\), \(x_3(0)=[6\quad -\,7]^{\mathrm{T}}\), \(x_4(0)=[9\quad 8]^{\mathrm{T}}\), \({\hat{x}}_1(0)=[-\,3\quad 6]^{\mathrm{T}}\), \({\hat{x}}_2(0)=[9\quad -\,3]^{\mathrm{T}}\), \({\hat{x}}_3(0)=[-\,2\quad -\,6]^{\mathrm{T}}\), \({\hat{x}}_4(0)=[8\quad 5]^{\mathrm{T}}\) and \(s(0)=[6\quad 8]^{\mathrm{T}}\). With these initial conditions, the corresponding response curves under the above-obtained gain matrices are plotted in Figs. 2, 3, 4, 5, 6, 7, 8, 9, 10 and 11. The state responses of four nodes together with an isolated node under the proposed controller with and without FOEID estimator are plotted in Figs. 2 and 3, respectively, where the dotted line is the isolated node and the dashed lines are the four identical nodes. From Fig. 2, it is seen that the states of the nodes are perfectly synchronized with the states of the isolated node in a short period of time which shows the effectiveness of the proposed control design. Figure 3 shows that in the absence of EID-estimator input, the dynamics of FOCDNs fail to synchronize to the isolated node due to the external disturbance effect. Moreover, the corresponding error state trajectories with and without FOEID estimator are given in Figs. 4 and 5, respectively. Further, Fig. 6 depicts the control performance of the controller with and without EID input. From Fig. 6, it is noted that in the absence of FOEID estimator signal, magnitude of the control input largely increases but in the presence of FOEID estimator input, less control effort is obtained. Next, in Fig. 7, the actual disturbance inputs and their corresponding FOEID estimations are plotted, where it can be seen that the given disturbance signals are exactly estimated. Lastly, we will show the effect of FOMWCDNs (1). We allow to vary the parameter \(\alpha \) while keeping the other parameters and initial values are fixed. Figures 8, 9, 10 and 11 show the synchronization error first and second state between the various fractional orders of the considered system (1) when \(\alpha =0.1\) and \(\alpha =0.5\), respectively. We can observe from Figs. 8, 9, 10 and 11 that the synchronization speed for \(\alpha =0.5\) is faster than one for \(\alpha =0.1\), which implies the synchronization speed of system (1) is getting faster and faster with the increasing of fractional order \(\alpha \)\((0<\alpha <1)\). Thus, it can be concluded from the simulations that the FOEID-based controller effectively synchronizes FOMWCDN with satisfactory tracking performance.
In order to show the superiority of the proposed control scheme, we consider the following numerical example.

First error states of \(e_{i1}(t)\) with \(\alpha =0.1\)

First error states of \(e_{i1}(t)\) with \(\alpha =0.5\)

Second error states of \(e_{i2}(t)\) with \(\alpha =0.1\)

Second error states of \(e_{i2}(t)\) with \(\alpha =0.5\)

State trajectories and its estimation
Example 2
Consider the Lur’e CDN as in [55], which consists of five nodes and is described as follows:
where \(A=\begin{bmatrix}-\,20&1&0\\ 0&-\,0.7&1\\0&-\,14&-\,1 \end{bmatrix}\), \(B=\begin{bmatrix}-\,9.1241 \\ 0 \\ 0\end{bmatrix}, \)\(D=E=\begin{bmatrix} 1\\ 0\\0 \end{bmatrix}^{\mathrm{T}},\) and \( \varGamma =\begin{bmatrix}1&0&1\\1&1&0\\1&1&1 \end{bmatrix}\). Further, the outer coupling matrix be \(G{=}\begin{bmatrix}-\,2&1&0&0&1\\1&-\,2&1&0&0\\0&1&-\,2&1&0\\0&0&1&-\,2&1\\1&0&0&1&-\,2\end{bmatrix}\).

Error state trajectories
The nonlinear function is taken as \(f(x_i(t))=-\,0.7225x_{i1}(t)-0.2080(|x_{i1}(t)+1|-|x_{i1}(t)-1|)\ (i=1,2,3,4,5)\). Let the external disturbances be \(\omega _i(t)=10\sin (t)\ (i=1,2,3,4,5)\). Furthermore, the uncertain parameter matrices in the control gain are taken as \( \mathbb {M}=\begin{bmatrix} 0.1&0.1&0.2\\ 0.2&0.1&0.2\\ 0.1&0.1&0.3 \end{bmatrix}, \ \mathbb {N}=\begin{bmatrix} 0.2&0.2&0.1\\ 0.1&0.1&0.1\\ 0.2&0.1&0.2 \end{bmatrix} \) and \(\Delta (t)=\sin (t)\). The filter parameters are selected as \(A_F=-\,65{\mathcal {I}},\ B_F=64{\mathcal {I}}\) and \(C_F={\mathcal {I}}\). Then, by solving the LMI (22) in Theorem 2, we can get a set of feasible solutions from which the corresponding feedback control and observer gain matrices computed by \(K=\begin{bmatrix} 5.4801&-\,0.0026&0.0594 \\ 0.2280&-\,0.6362&-\,0.0311 \\ 3.4362&-\,0.2732&-\,0.3437 \end{bmatrix}\) and \(L=\begin{bmatrix} 247.1602 \\ 0.6225\\ -\,1.4926 \end{bmatrix}\). For the simulation purposes, we choose the initial conditions for the states of nodes \(x_{i1}(0)=[4\quad 5\quad 6]^{\mathrm{T}}\), the observer of nodes \({\hat{x}}_{i1}(0)=[7\quad 8\quad 9]^{\mathrm{T}}\) and the isolated node \(s(0)=[0\quad 0\quad 0]^{\mathrm{T}}\). The state and its estimation of first node under the proposed FOEID-based controller and the observer-based controller proposed in [55] are plotted in Fig. 12a and b, respectively. From these figures, it is concluded that the proposed FOEID-based control yields the better estimation performance than the classical observer-based controller. The synchronization error responses of the first node of the FOCDN (23) under the proposed FOEID-based controller and observer-based controller proposed in [55] are plotted in Fig. 13a and b, respectively. From Fig. 13b, it is easy to observe that the controller proposed in [55] fails to ensure to synchronization of the system (23). The simulations result demonstrates that the proposed FOEID-based controller is superior to the classical observer-based controller.
Remark 6
It should be noted that in [55], the external disturbance input is chosen as \(\omega (t)=\frac{1}{1+2t}\), in which as time increases \(\omega (t)\) tends to zero. So, in this case the state estimation is not affected since amount of the disturbance is less. However, in our paper the disturbance input is chosen as \(\omega (t)=10\sin (t)\), which is relatively high magnitude for all t. Therefore, it is noted that in the early works, the estimation performance of the observer-based controller depends on the magnitude of the disturbance input, but the proposed FOEID-based non-fragile feedback control does not depend on magnitude of the disturbance.
5 Conclusion
In this paper, a robust synchronization problem for FOMW CDN is studied via FOEID-based non-fragile control scheme. A new set of sufficient conditions for the robust synchronization of the FOMWCDN is established in terms of LMIs by using an indirect Lyapunov method and the properties of fractional calculus theory. It should be mentioned that the synchronization criterion is obtained such that control and observer gains are irrelevant of the disturbance. Finally, two numerical examples are explored to demonstrate the effectiveness and superiority of the proposed control design. It is worth noting that the developed results can be extended to Lur’e dynamical networks with distributed delays based on the impulsive controller approach [56,57,58] which will be the topic of future research.
References
Xu, Y., Lu, R., Shi, P., Li, H., Xie, S.: Finite-time distributed state estimation over sensor networks with round-robin protocol and fading channels. IEEE Trans. Cybern. 48(1), 336–345 (2018)
Wan, Y., Cao, J., Chen, G., Huang, W.: Distributed observer-based cyber-security control of complex dynamical networks. IEEE Trans. Circuits Syst. I Reg. Pap. 64(11), 2966–2975 (2017)
Park, J.H., Tang, Z., Feng, J.: Pinning cluster synchronization of delay-coupled Lur’e dynamical networks in a convex domain. Nonlinear Dyn. 89(1), 623–638 (2017)
Selvaraj, P., Sakthivel, R., Kwon, O.M.: Finite-time synchronization of stochastic coupled neural networks subject to Markovian switching and input saturation. Neural Netw. 105, 154–165 (2018)
Zeng, D., Wu, K.T., Liu, Y., Zhang, R., Zhong, S.: Event-triggered sampling control for exponential synchronization of chaotic Lur’e systems with time-varying communication delays. Nonlinear Dyn. 91(2), 905–921 (2018)
N’Doye, I., Salama, K.N., Laleg-Kirati, T.M.: Robust fractional-order proportional-integral observer for synchronization of chaotic fractional-order systems. IEEE/CAA J. Autom. Sin. 6(1), 268–277 (2019)
Wang, H., Jing, X.J.: A sensor network based virtual beam-like structure method for fault diagnosis and monitoring of complex structures with improved bacterial optimization. Mech. Syst. Signal Process. 84, 15–38 (2017)
Abdurahman, A., Jiang, H., Teng, Z.: Finite-time synchronization for fuzzy cellular neural networks with time-varying delays. Fuzzy Sets Syst. 297, 96–111 (2016)
Li, X.J., Yang, G.H.: Fuzzy approximation-based global pinning synchronization control of uncertain complex dynamical networks. IEEE Trans. Cybern. 47(4), 873–883 (2016)
Zhang, D., Wang, Q.G., Srinivasan, D., Li, H., Yu, L.: Asynchronous state estimation for discrete-time switched complex networks with communication constraints. IEEE Trans. Neural Netw. Learn. Syst. 29(5), 1732–1746 (2018)
Aouiti, C., Coirault, P., Miaadi, F., Moulay, E.: Finite time boundedness of neutral high-order Hopfield neural networks with time delay in the leakage term and mixed time delays. Neurocomputing 260, 378–392 (2017)
Liu, M., Wu, J., Sun, Y.Z.: Adaptive finite-time outer synchronization between two complex dynamical networks with noise perturbation. Nonlinear Dyn. 89(4), 2967–2977 (2017)
Li, H., Wu, C., Jing, X., Wu, L.: Fuzzy tracking control for nonlinear networked systems. IEEE Trans. Cybern. 47(8), 2020–2031 (2017)
Li, H., Wu, C., Yin, S., Lam, H.K.: Observer-based fuzzy control for nonlinear networked systems under unmeasurable premise variables. IEEE Trans. Fuzzy Syst. 24(5), 1233–1245 (2016)
Feng, J., Li, N., Zhao, Y., Xu, C., Wang, J.: Finite-time synchronization analysis for general complex dynamical networks with hybrid couplings and time-varying delays. Nonlinear Dyn. 88(4), 2723–2733 (2017)
Wang, J.L., Wu, H.N., Huang, T., Ren, S.J., Wu, J., Zhang, X.X.: Analysis and control of output synchronization in directed and undirected complex dynamical networks. IEEE Trans. Neural Netw. Learn. Syst. 29(8), 3326–3338 (2018)
Wang, J.L., Wu, H.N., Huang, T., Ren, S.Y., Wu, J.: Passivity of directed and undirected complex dynamical networks with adaptive coupling weights. IEEE Trans. Neural Netw. Learn. Syst. 28(8), 1827–1839 (2017)
Wang, Y.W., Bian, T., Xiao, J.W., Wen, C.: Global synchronization of complex dynamical networks through digital communication with limited data rate. IEEE Trans. Neural Netw. Learn. Syst. 26(10), 2487–2499 (2015)
Wang, J.L., Wu, H.N., Huang, T., Ren, S.Y., Wu, J.: Passivity and output synchronization of complex dynamical networks with fixed and adaptive coupling strength. IEEE Trans. Neural Netw. Learn. Syst. 29(2), 364–376 (2018)
Su, L., Shen, H.: Mixed \(H_\infty /\) passive synchronization for complex dynamical networks with sampled-data control. Appl. Math. Comput. 259, 931–942 (2015)
Wang, J.L., Xu, M., Wu, H.N., Huang, T.: Passivity analysis and pinning control of multi-weighted complex dynamical networks. IEEE Trans. Netw. Sci. Eng. 6(1), 60–73 (2019)
Qin, Z., Wang, J.L., Huang, Y.L., Ren, S.Y.: Synchronization and \(H_\infty \) synchronization of multi-weighted complex delayed dynamical networks with fixed and switching topologies. J. Frankl. Inst. 354(15), 7119–7138 (2017)
Shen, J., Lam, J.: Stability and performance analysis for positive fractional-order systems with time-varying delays. IEEE Trans. Autom. Control 61(9), 2676–2681 (2016)
Chen, L., Cao, J., Wu, R., Machado, J.T., Lopes, A.M., Yang, H.: Stability and synchronization of fractional-order memristive neural networks with multiple delays. Neural Netw. 94, 76–85 (2017)
Zhang, H., Ye, M., Ye, R., Cao, J.: Synchronization stability of Riemann–Liouville fractional delay-coupled complex neural networks. Physica A Stat. Mech. Appl. 508, 155–165 (2018)
Jiang, H.P., Liu, Y.Q.: Disturbance rejection for fractional-order time-delay systems. Math. Probl. Eng. 2016, 1–6 (2016)
Zhang, H., Ye, R., Liu, S., Cao, J., Alsaedi, A., Li, X.: LMI-based approach to stability analysis for fractional-order neural networks with discrete and distributed delays. Int. J. Syst. Sci. 49(3), 537–545 (2018)
Zhang, H., Ye, R., Cao, J., Alsaedi, A.: Delay-independent stability of Riemann–Liouville fractional neutral-type delayed neural networks. Neural Process. Lett. 47(3), 427–442 (2018)
Boukal, Y., Michel, Z., Mohamed, D., Radhy, N.D.: Fractional order time-varying-delay systems: a delay-dependent stability criterion by using diffusive representation. In: Azar, A.T., Radwan, A.G., Vaidyanathan, S. (eds.) Mathematical Techniques of Fractional Order Systems, pp. 133–158. Elsevier, Amsterdam (2018)
Zhang, H., Ye, R., Cao, J., Ahmed, A., Li, X., Wan, Y.: Lyapunov functional approach to stability analysis of Riemann–Liouville fractional neural networks with time-varying delays. Asian J. Control 20(5), 1938–1951 (2018)
Luo, S., Li, S., Tajaddodianfar, F., Hu, J.: Observer-based adaptive stabilization of the fractional-order chaotic MEMS resonator. Nonlinear Dyn. 92(3), 1079–1089 (2018)
Chen, X., Zhang, J., Ma, T.: Parameter estimation and topology identification of uncertain general fractional-order complex dynamical networks with time delay. IEEE/CAA J. Autom. Sin. 3(3), 295–303 (2016)
Bao, H., Park, J.H., Cao, J.: Synchronization of fractional-order complex-valued neural networks with time delay. Neural Netw. 81, 16–28 (2016)
Li, R., Gao, X., Cao, J.: Non-fragile state estimation for delayed fractional-order memristive neural networks. Appl. Math. Comput. 340, 221–233 (2019)
Kong, S., Saif, M., Liu, B.: Observer design for a class of nonlinear fractional-order systems with unknown input. J. Frankl. Inst. 354(13), 5503–5518 (2017)
Wei, Y.Q., Liu, D.Y., Boutat, D., Chen, Y.M.: An improved pseudo-state estimator for a class of commensurate fractional order linear systems based on fractional order modulating functions. Syst. Control Lett. 118, 29–34 (2018)
Dadkhah, N., Rodrigues, L.: Non-fragile state-feedback control of uncertain piecewise-affine slab systems with input constraints: a convex optimisation approach. IET Control Theory Appl. 8(8), 626–632 (2014)
Zhang, D., Shi, P., Wang, Q.G., Yu, L.: Distributed non-fragile filtering for T–S fuzzy systems with event-based communications. Fuzzy Sets Syst. 306, 137–152 (2017)
Yu, H., Hao, F.: Design of event conditions in event-triggered control systems: a non-fragile control system approach. IET Control Theory Appl. 10(9), 1069–1077 (2016)
Zhang, Z., Zhang, H., Wang, Z., Shan, Q.: Non-fragile exponential \(H_\infty \) control for a class of nonlinear networked control systems with short time-varying delay via output feedback controller. IEEE Trans. Cybern. 47(8), 2008–2019 (2017)
Liu, Y., Guo, B.Z., Park, J.H., Lee, S.M.: Non-fragile exponential synchronization of delayed complex dynamical networks with memory sampled-data control. IEEE Trans. Neural Netw. Learn. Syst. 29(1), 118–128 (2018)
Gyurkovics, E., Kiss, K., Kazemy, A.: Non-fragile exponential synchronization of delayed complex dynamical networks with transmission delay via sampled-data control. J. Frankl. Inst. 355(17), 8934–8956 (2018)
Zhou, J., Park, J.H., Ma, Q.: Non-fragile observer-based \(H_\infty \) control for stochastic time-delay systems. Appl. Math. Comput. 291, 69–83 (2016)
Su, L., Ye, D., Yang, X.: Dissipative-based sampled-data synchronization control for complex dynamical networks with time-varying delay. J. Frankl. Inst. 354(15), 6855–6876 (2017)
Chen, M., Shao, S.Y., Shi, P., Shi, Y.: Disturbance-observer-based robust synchronization control for a class of fractional-order chaotic systems. IEEE Trans. Circuits Syst. II Exp. Briefs 64(4), 417–421 (2016)
Li, M., Li, D., Wang, J., Zhao, C.: Active disturbance rejection control for fractional-order system. ISA Trans. 52(3), 365–374 (2013)
Ouyang, L., Wu, M., She, J.: Estimation of and compensation for unknown input non-linearities using equivalent-input-disturbance approach. Nonlinear Dyn. 88(3), 2161–2170 (2017)
She, J., Fang, M., Ohyama, Y., Hashimoto, H., Wu, M.: Improving disturbance-rejection performance based on an equivalent-input-disturbance approach. IEEE Trans. Ind. Electron. 55(1), 380–389 (2008)
Sakthivel, R., Mohanapriya, S., Selvaraj, P., Karimi, H.R., Marshal Anthoni, S.: EID estimator-based modified repetitive control for singular systems with time-varying delay. Nonlinear Dyn. 89(2), 1141–1156 (2017)
Liu, R.J., Nie, Z.Y., Wu, M., She, J.: Robust disturbance rejection for uncertain fractional-order systems. Appl. Math. Comput. 322, 79–88 (2018)
Lan, Y.H., Zhou, Y.: Non-fragile observer-based robust control for a class of fractional-order nonlinear systems. Syst Control Lett. 62, 1143–1150 (2013)
Trigeassou, J.C., Maamri, N., Sabatier, J., Oustaloup, A.: A Lyapunov approach to the stability of fractional differential equations. Signal Process. 91(3), 437–445 (2011)
Kaviarasan, B., Sakthivel, R., Lim, Y.: Synchronization of complex dynamical networks with uncertain inner coupling and successive delays based on passivity theory. Neurocomputing 186, 127–138 (2016)
Lan, Y.H., Gu, H.B., Chen, C.X., Zhou, Y., Luo, Y.P.: An indirect Lyapunov approach to the observer-based robust control for fractional-order complex dynamic networks. Neurocomputing 136, 235–242 (2015)
Qing, Z.H., Wei, J.Y.: Robust \(H_\infty \) observer-based control for synchronization of a class of complex dynamical networks. Chin. Phys. B 20(6), 060504 (2011)
Tang, Z., Park, J.H., Zheng, W.X.: Distributed impulsive synchronization of Lur’e dynamical networks via parameter variation methods. Int. J. Robust Nonlinear 28(3), 1001–1015 (2018)
Tang, Z., Park, J.H., Wang, Y., Feng, J.: Distributed impulsive quasi-synchronization of Lur’e networks with proportional delay. IEEE Trans. Cybern. 49(8), 3105–3115 (2019)
Tang, Z., Park, J.H., Feng, J.: Novel approaches to pin cluster synchronization on complex dynamical networks in Lur’e forms. Commun. Nonlinear Sci. Numer. Simul. 57, 422–438 (2018)
Acknowledgements
The work of first and fifth authors was supported by the NBHM/DAE under Grant No. 2/48(4)/2013/ NBHM (R.P)/R & D ll/687.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Sakthivel, R., Sakthivel, R., Kwon, OM. et al. Observer-based robust synchronization of fractional-order multi-weighted complex dynamical networks. Nonlinear Dyn 98, 1231–1246 (2019). https://doi.org/10.1007/s11071-019-05258-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-019-05258-1