
Abstract
Water waves are one of the most common phenomena in nature, the study of which helps in designing the related industries. In this paper, a generalized (\(3+1\))-dimensional B-type Kadomtsev–Petviashvili equation for the water waves is investigated. Gramian solutions are constructed via the Kadomtsev–Petviashvili hierarchy reduction. Based on the Gramian solutions, we construct the breathers. We graphically analyze the breather solutions and find that the breathers can be reduced to the homoclinic orbits. For the higher-order breather solutions, we obtain the mixed solutions consisting of the breathers and homoclinic orbits. According to the long-wave limit method, rational solutions are constructed. We look at two types of the rational solutions, i.e., the lump and line rogue wave solutions, and give the condition for the lumps being reduced to the line rogue waves. Taking another set of the parameters for the Gramian solutions, we also derive the kinky breather solutions which can be reduced to the kink solitons. For the higher-order kinky breather solutions, we obtain the mixed solutions consisting of the breathers and kink solitons. Combining the breather and rational solutions, we construct two kinds of the hybrid solutions composed of the breathers, lumps, line rogue waves and kink solitons. Characteristics of those hybrid solutions are graphically analyzed and the conditions for the generation of those hybrid solutions are given.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Water waves have been thought to be one of the most common phenomena in nature, the study of which helps in designing the related industries [1,2,3,4,5,6,7]. The Kadomtsev–Petviashvili (KP)-type equations have been seen in fluid mechanics, nonlinear optics and plasma physics [8,9,10,11,12,13,14,15]. People have also obtained the B-type KP hierarchy by imposing an extra condition between the Lax operator and its adjoint of the KP hierarchy [16,17,18,19,20]. To study the B-type KP hierarchy, researchers have presented a generalized (\(3+1\))-dimensional B-type KP equation for the water waves [21,22,23],
where \(u=u(x,y,z,t)\) is a real function of the scaled spatial coordinates x, y, z and temporal coordinate t, the subscripts denote the partial derivatives. The higher-order, multiple rogue waves and lumps for Eq. (1) have been obtained based on the solutions in terms of the Gramian [21]. Multiple wave solutions for Eq. (1) have been constructed by means of the multiple exp-function algorithm [22]. N-soliton solutions formed by the linear combinations of the exponential traveling waves have been constructed [23].
Breathers, lumps and rogue waves have attracted researchers’ attention because of their applications in fluid mechanics, nonlinear optics, plasma physics and other fields [24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40]. It has been considered that there are three types of the breathers, namely the Akhmediev breathers, Kuznetsov–Ma breathers and Peregrine solitons [36, 41,42,43,44,45,46]. As a kind of the rational solutions, lumps have been considered as the waves localized in all directions in the space [33,34,35]. Rogue waves have been seen as the large-amplitude waves unexpectedly appearing in the oceans [36,37,38, 47, 48]. A potential mechanism for the formation of the rogue waves has been associated with the modulation instability [45, 49,50,51,52]. Peregrine solitons have been considered as the prototype of the rogue waves in the oceans [36]. It has been reported that three types of the breathers are mutually related, especially the Peregrine solitons have been considered as the limiting form of the Akhmediev or Kuznetsov–Ma breathers [53, 54].
To our knowledge, the breather solutions and hybrid solutions which are composed of the breathers, lumps, line rogue waves and kink solitons for Eq. (1) have not been studied via the KP hierarchy reduction. In Sect. 2, we will construct the solutions in terms of the Gramian which are different from those in Ref. [21] for Eq. (1). In Sect. 3, we will derive one kind of the breather solutions for Eq. (1), which can be reduced to the homoclinic orbits under certain conditions. According to the long-wave limit method [33, 55], we will also construct the rational solutions including the lumps and line rogue waves for Eq. (1). In Sect. 4, one kind of the hybrid solutions composed of the breathers, lumps and line rogue waves for Eq. (1) will be obtained. In Sect. 5, another kind of the breather solutions and hybrid solutions which are composed of the breathers, lumps and kink solitons for Eq. (1) will be constructed. In Sect. 6, we will give our conclusions.
2 Gramian solutions for Eq. (1)
By virtue of the dependent variable transformation [21]
where \(f=f(x,y,z,t)\) is a real function, Eq. (1) can be converted into the following bilinear form [14]:
where D is the Hirota’s bilinear differential operator defined as [56]
with g as a function of the formal variables \(x',y',z'\) and \(t'\), \(l_1,l_2,l_3\) and \(l_4\) being the non-negative integers.
Referring to Refs. [57,58,59,60], the bilinear equation in the KP hierarchy,
admits the Gramian solutions,
where the matrix element \(m_{ij}^{(n)}\) satisfies the following differential and difference relations:
\(m_{ij}^{(n)}\), \(\varphi _i^{(n)}\) and \(\psi _j^{(n)}\) are the functions of the variables \(x_1,x_2,x_3\) and \(x_4\), “\(\partial \)” means the partial derivative, n is an integer and N is a positive integer. Proof process about \(\tau _n\) being the solutions of Bilinear Form (4) can be found in Ref. [21].
In order to construct the breather solutions for Eq. (1), satisfying (6), we choose
with
where \(p_i\), \(q_j\), \(r_i^0\) and \(s_j^0\) are the complex constants, \(\delta _{ij}=1~(i=j)\) and \(\delta _{ij}=0~(i\ne j)\).
We set \(f=\tau _0\) and take the independent variable transformations:
where \(I=\sqrt{-\,1}\), and then Bilinear Form (4) can be reduced to Bilinear Form (3). With certain parameters \(p_i\) and \(q_j\) given in [61], we can prove that \(f=\tau _0\) is a real function. Therefore, Gramian solutions for Bilinear Form (3) can be written as
where
and then, by virtue of the transformation \(u=2(\ln f)_x\), we can obtain the Gramian solutions which are different from those in [21] for Eq. (1).
3 The first kind of the breather and rational solutions for Eq. (1)
3.1 The first kind of the breather solutions for Eq. (1)
In Appendix A, we construct the first kind of the breather solutions for Eq. (1). Setting \(M=1\) in Eq. (24), we can obtain the first-order breather solutions for Eq. (1) as
where
Take \(\varLambda _1=\varLambda _{1R}+I\varLambda _{1I}\) with \(I=\sqrt{-1}\), \(\varLambda _{1R}\) and \(\varLambda _{1I}\) as the real constants, and we rewrite \(\zeta _1=\zeta _{1R}+I\zeta _{1I}\), where
It can be found that the behavior of the first-order breather is affected by \(\varLambda _{1R},~\varLambda _{1I}\) and \(\lambda _1\), and the asymptotic behavior of the first-order breather is \(u\rightarrow 0\) as \(\zeta _{1R}\rightarrow \pm \,\infty \). Moreover, the first-order breather is localized along the direction of the line \(\zeta _{1R}=0\) and periodic along the direction of the line \(\zeta _{1I}=0\). Calculation shows that \(\varLambda _{1I}\) and \(\lambda _1\) cannot be zero; otherwise, the first-order breather solutions will be equal to zero. Because \(\zeta _{1R}\) only contains the expressions of y and t but not the expression of x, the first-order breather is parallel to the x axis on the (x, y) and (x, z) planes. However, on the (y, z) plane, the first-order breather has an angle with the y and z axis. Particularly, when the coefficient of z in \(\zeta _{1R}\) is equal to zero, i.e., \(\lambda _1^2-4\varLambda _{1I}^2+12\varLambda _{1R}^2=0\), the first-order breather will be parallel to the z axis on the (y, z) plane.
We note that when \(\frac{\partial \zeta _{1R}}{\partial z}=0\) or \(\frac{\partial \zeta _{1R}}{\partial t}=0\), which means that the coefficient of z or t in \(\zeta _{1R}\) is equal to zero, and the localized behavior of the breather only appears in the t axis. Those breathers will be reduced to the periodic line waves on the (x, z) or (x, t) plane, where the periodic line waves begin from the constant plane, then form the periodic waves, and finally return to the plane. That kind of the solution is also called the homoclinic orbit [62, 63]. Because \(\varLambda _{1I}\) and \(\lambda _1\) cannot be zero, there is no such solution on the (x, y) plane.
The higher-order breather solutions for Eq. (1) can be obtained similarly. For instance, when \(M=2\), the second-order breather solutions for Eq. (1) are
where

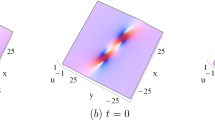
The second-order breathers via Solutions (10) with \(\varLambda _1=0.4+I,~\lambda _1=2,~\varLambda _2=-\,\frac{1}{3}+\frac{2}{3}I,~ \lambda _2=\frac{2}{3}\) and \(\zeta _1^0=\zeta _2^0=0\). a\(z=0\); b\(x=0\); c\(y=0\)
From the above analysis on the first-order breather solutions, we know that there are three forms of the second-order breathers, which contain two first-order breathers, two homoclinic orbits and the mixed form consisting of one first-order breather and one homoclinic orbit, as shown in Fig. 1. Since \(\zeta _{1R}\) in Eqs. (12) only contains the expressions of y and t but not the expression of x, which means that the x direction shows only the periodicity, so that the second-order breathers are still parallel to the x axis on the (x, y) and (x, z) planes. However, on the (y, z) plane, we can construct the breathers which are parallel to the z axis or have an angle to the y and z axes. Because \(\text {Im}(\varLambda _1)\) (where \(\hbox {Im}(\bullet )\) is the imaginary part of \(\bullet \)) and \(\lambda _1\) in Solutions (10) cannot be zero, the second-order breathers on the (y, z) plane can be parallel to the z axis but not to the y axis. We find two interaction forms of the second-order breathers. The two first-order breathers propagate along the same direction and undergo an overtaking interaction when \(\text {Re}(\varLambda _1)\cdot \text {Re}(\varLambda _2)>0\) (where \(\hbox {Re}(\bullet )\) is the real part of \(\bullet \)) in Solutions (10). However, when \(\text {Re}(\varLambda _1)\cdot \text {Re}(\varLambda _2)<0\) in Solutions (10), the two first-order breathers propagate in the opposite direction and undergo a head-on interaction.
If we take \(\frac{\partial \text {Re}(\zeta _1)}{\partial z}=0\) or \(\frac{\partial \text {Re}(\zeta _2)}{\partial z}=0\) in Solutions (10), we can obtain the mixed form of the second-order breather solutions consisting of one first-order breather and one homoclinic orbit, as shown in Fig. 1. It can be seen that the mixed solutions only contain one first-order breather when \(|t|\ge 0\), and the first-order breather is parallel to the x axis. When \(|t|\rightarrow 0\), periodic line waves arise from the constant background and interact with the first-order breather. Moreover, let both \(\frac{\partial \text {Re}(\zeta _1)}{\partial z}=0\) and \(\frac{\partial \text {Re}(\zeta _2)}{\partial z}=0\) in Solutions (10), and we can obtain the second-order breather solutions consisting of two homoclinic orbits.
3.2 Rational solutions for Eq. (1)
According to the long-wave limit method [23, 39], we construct the rational solutions for Eq. (1) in Appendix B. We note that the rational solutions have also been obtained via another method in [21]. When \(M=1\), the rational solutions for Eq. (1) can be written as
with
Let \(\varLambda _1=a+Ib\) with a and b as the real constants, and the rational solutions can be rewritten as
where
Next, we give two types of the rational solutions:
-
1.
Lumps. We take the (x, z) plane as an example. From Eq. (14), when \(y=0\), at any fixed t, when (x, z) goes to the infinity, \(u\rightarrow 0\). Hence that solution indicates a lump moving on a constant background, and that lump has two extreme points at \((\frac{1}{2b},0)\) and \((-\,\frac{1}{2b},0)\) with the maximum and minimum being 4b and \(-\,4b\), respectively.
-
2.
Line rogue waves. When \(p=0\) in Solutions (14), i.e., \(4b(b^2-3a^2)=0\), the lumps will be reduced to the line rogue waves on the (x, z) plane. Different from that of the soliton, the amplitude of the line rogue wave varies with t, and the maximum and minimum amplitudes of the line rogue waves are 4b and \(-\,4b\), respectively. We note that because b cannot be zero (otherwise u is equal to zero), there is no such line rogue waves on the (x, y) plane.

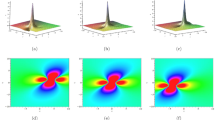
The second-order rational solutions via Solutions (15) with \(\varLambda _1=\frac{1}{2}+\frac{\sqrt{3}}{2}\) and \(\varLambda _2=-\,\frac{1}{2}+\frac{\sqrt{3}}{2}\). a \(z=0\); b \(x=0\); c \(y=0\)
When \(M=2\), the second-order rational solutions are
where

The second-order rational solutions via Solutions (15) with \(\varLambda _1=0.2+0.6I\) and \(\varLambda _2=-\,\frac{1}{3}+\frac{\sqrt{3}}{3}\). a \(z=0\); b \(x=0\); c \(y=0\)
The second-order rational solutions contain the two lumps, two line rogue waves and the mixed form consisting of one lump and one line rogue wave, as shown in Fig. 2. Similar to the second-order breathers, there are also two kinds of the interaction forms from the two lumps, as shown in Fig. 2. We show the evolution of the two line rogue waves in Fig. 2c. It can be seen that the two line rogue waves arise from a constant background, then reach their maximum amplitudes at \(t=0\) and finally disappear into the background again. We also find that the amplitude at the location of the interaction between the two line rogue waves is zero and the wave pattern forms two curvy wavefronts which are separated, as seen in Fig. 3c. We illustrate the mixed solution consisting of one lump and one line rogue wave in Fig. 3, from which we find that the lump exists all the time and moves on the constant background but the line rogue wave exists only for a period of t. When the amplitude of the line rogue wave reaches the maximum value, the line rogue wave crosses over the lump and the lump is divided into two parts.
4 Hybrid solutions for Eq. (1)
We give the hybrid solutions for Eq. (1) in Appendix C. When \({\widetilde{N}}={\widehat{N}}=1\) in Eq. (26), rational- and exponent-type solutions can be written as
where \(\varDelta _0=\lambda _2^2e^{\zeta _2+\zeta _2^*}\) and
Based on the above analysis on the breather and rational solutions, we know that the hybrid solutions are composed of the lumps, breathers, line rogue waves and homoclinic orbits. We show the rational and exponent solutions in Fig. 4. It can be seen that the breather is parallel to the x axis on the (x, y) plane but has an angle with the y and z axes on the (y, z) plane.

Hybrid solutions via Solutions (16) with \(\varLambda _1=-\,\frac{2}{5}+\frac{2\sqrt{3}}{5}I,~\varLambda _2=0.3+I\) and \(\lambda _2=1\). a \(z=0\); b \(x=0\); c \(y=0\)
We find that the breather and lump move in the opposite directions and form the head-on interaction when \(\text {Re}(\varLambda _1)\cdot \text {Re}(\varLambda _2)<0\) in Eq. (16). However, when \(\text {Re}(\varLambda _1)\cdot \text {Re}(\varLambda _2)>0\) in Eq. (16), the breather and lump move in the same direction and form the overtaking interaction. If we set \([\text {Im}(\varLambda _1)]^2=3[\text {Re}(\varLambda _1)]^2\) in Eq. (16), we can obtain the hybrid solutions consisting of one breather and one line rogue wave, as shown in Fig. 4c. It can be seen that the breather moves on the (x, z) plane and the line rogue wave only exists for a limited period of t in Fig. 4c. If we set \(\lambda _2^2-4[\text {Im}(\varLambda _2)]^2+12[\text {Re}(\varLambda _2)]^2=0\) in Eq. (16), we can obtain the hybrid solutions consisting of one homoclinic orbit and one line rogue wave.
5 The second kind of the breather and hybrid solutions for Eq. (1)
5.1 The second kind of the breather solutions for Eq. (1)
In Appendix D, we construct the second kind of the breather solutions for Eq. (1). Different from the first kind of the breather solutions for Eq. (1), the second kind of the breather solutions emerges from some different characteristics. For example, when \(M=1\) in Eq. (29), the first-order breather solutions for Eq. (1) can be written as
where
Take \(\varLambda _1=\varLambda _{1R}+I\varLambda _{1I}\), and we rewrite \(\zeta _1=\zeta _{1R}+I\zeta _{1I}\), where
The first-order kinky breather in Fig. 5 shows both the features of the breather and kink. Kinky breather is also localized along the direction of the line \(\zeta _{1R}=0\) and periodic along the direction of the line \(\zeta _{1I}=0\). We find that the kinky breather in Fig. 5 does not need to be parallel to the x axis on the (x, y) and (x, z) planes because \(\zeta _{1R}\) in Eq. (18) contains four variables x, y, z and t. Moreover, the imaginary part in Eq. (17b) will disappear when \(\zeta _{1I}=0\), and then the kinky breather will be reduced to the kink soliton.

The first-order kinky breather via Solutions (17) with \(\varLambda _1=0.6-\frac{2}{3}I\) and \(\lambda _1=\frac{1}{2}\). a \(z=0\); b \(x=0\); c \(y=0\)

The second-order kinky breathers via Solutions (19) with \(\varLambda _1=\frac{3}{4}I,~\lambda _1=1,~\varLambda _2=\frac{3}{5}-\frac{2}{3}I\) and \(\lambda _2=\frac{1}{2}\). a \(z=0\); b \(x=0\); c \(y=0\)
When \(M=2\) in Eq. (29), the second-order kinky breather solutions for Eq. (1) can be written as
where
We find that the second-order kinky breather solutions contain two first-order kinky breathers, two kink solitons and the mixed solutions consisting of one first-order kinky breather and one kink soliton. If we set \(\text {Re}(\varLambda _k)=0\) in Eq. (19), the kinky breather will be reduced to the kink soliton. We can construct the mixed solutions consisting of one kinky breather and one kink soliton when \(\hbox {Re}(\varLambda _1)=0\) and of two kink solitons when \(\hbox {Re}(\varLambda _1)=\hbox {Re}(\varLambda _2)=0\) in Eq. (19). We find that the kinky breather and kink soliton move in the opposite directions when \(\text {Im}(\varLambda _1)\cdot \text {Im}(\varLambda _2)<0\) or move in the same direction when \(\text {Im}(\varLambda _1)\cdot \text {Im}(\varLambda _2)>0\) in Eq. (19).

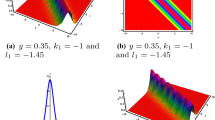
Hybrid solutions via Solutions (21) with \(\varLambda _1=\frac{\sqrt{3}}{3}-\frac{1}{3}I,~\varLambda _2=\frac{2}{3}+I,~\lambda _2=\frac{1}{2}\) and \(y=0\). a \(z=0\); b \(x=0\); c \(y=0\)

Hybrid solutions via Solutions (21) with \(\varLambda _1=\frac{\sqrt{3}}{4}-\frac{1}{4}I,~\varLambda _2=\frac{3}{2}I,~\lambda _2=\frac{3}{2}\) and \(y=0\). a \(z=0\); b \(x=0\); c \(y=0\)
5.2 Hybrid solutions for Eq. (1)
Based on the second kind of the breather solutions, we construct the hybrid solutions for Eq. (1) in Appendix E. According to Eq. (26), when \({\widetilde{N}}={\widehat{N}}=1\), the hybrid solutions can be written as
where \(\varDelta _0=\lambda _2^2e^{\zeta _2+\zeta _2^*}\) and
That kind of the hybrid solutions, composed of the kinky breathers, lumps and kink solitons, is shown in Figs. 7 and 8. Hybrid solutions composed of one kinky breather and one lump is shown in Fig. 7. Similarly to that in Fig. 6, if we set \(\text {Im}(\zeta _2)=0\) in Eq. (22), the kinky breather will be reduced to the kink soliton and we can obtain the hybrid solutions composed of one kink soliton and one lump. When we set \([\text {Re}(\varLambda _1)]^2=3[\text {Im}(\varLambda _1)]^2\) in Eq. (22), we can derive the hybrid solutions composed of one kinky breather and one line rogue wave, as shown in Fig. 7. Moreover, if we set \([\text {Re}(\varLambda _1)]^2=3[\text {Im}(\varLambda _1)]^2\) and \(\text {Im}(\zeta _2)=0\) in Eq. (22), which means that the kinky breather is reduced to the kink soliton and the lump is reduced to the line rogue wave, we can obtain the hybrid solutions composed of one kink soliton and one line rogue wave, as shown in Fig. 8.
6 Conclusions
Water waves have been thought to be one of the most common phenomena in nature, the study of which helps in designing the related industries. In this paper, a generalized (\(3+1\))-dimensional B-type KP equation for the water waves, i.e., Eq. (1), has been studied. Different from those in Ref. [21], Gramian Solutions (7) for Eq. (1) have been constructed via the KP hierarchy reduction. Based on Solutions (7), we have derived the first- and second-order breather solutions, i.e., Solutions (8) and Solutions (10). We have found that the first-order breather is parallel to the x axis on the (x, y) and (x, z) planes and can be reduced to the homoclinic orbits. For the higher-order breather solutions, we have constructed the mixed solutions consisting of the breathers and homoclinic orbits, as shown in Fig. 1. According to the long-wave limit method, rational Solutions (25) for Eq. (1) have been derived. Two types of the rational solutions, i.e., lump and line rogue wave solutions, have been analyzed, as shown in Figs. 2 and 3 . We have found that the lumps can be reduced to the line rogue waves. We have also constructed the hybrid solutions composed of the breathers, lumps and line rogue waves, i.e., Solutions (26), for Eq. (1). Characteristics of those hybrid solutions have been graphically analyzed, as shown in Fig. 4.
Taking the parameters given in Eq. (28) for Gramian Solutions (7), we have also derived the kinky breather solutions for Eq. (1), i.e., Solutions (29). The first- and second-order kinky breathers are shown in Figs. 5 and 6 . We have found that it is not necessary for the kinky breathers to be parallel to the x axis, i.e., the kinky breathers can have an angle to the x axis, and the kinky breathers can be reduced to the kink solitons. For the higher-order kinky breather solutions, we have constructed the mixed solutions consisting of the kinky breathers and kink solitons. Meanwhile, we have derived another kind of the hybrid solutions, i.e., Solutions (30), for Eq. (1), which are composed of the breathers, lumps, line rogue waves and kink solitons. Characteristics of those hybrid solutions have also been graphically analyzed, as shown in Figs. 7 and 8.
References
Ablowitz, M.J., Segur, H.: On the evolution of packets of water waves. J. Fluid Mech. 92, 691–715 (1979)
Johnson, R.S.: A Modern Introduction to the Mathematical Theory of Water Waves. Cambridge University Press, Cambridge (1997)
Zhao, X.H., Tian, B., Guo, Y.J., Li, H.M.: Solitons interaction and integrability for a (\(2+1\))-dimensional variable-coefficient Broer-Kaup system in water waves. Mod. Phys. Lett. B 32, 1750268 (2018)
Yin, H.M., Tian, B., Chai, J., Wu, X.Y.: Stochastic soliton solutions for the (\(2+1\))-dimensional stochastic Broer-Kaup equations in a fluid or plasma. Appl. Math. Lett. 82, 126 (2018)
Dolatshah, A., Nelli, F., Bennetts, L.G.: Hydroelastic interactions between water waves and floating freshwater ice. Phys. Fluids 30, 091702 (2018)
Lan, Z.Z., Hu, W.Q., Guo, B.L.: General propagation lattice Boltzmann model for a variable-coefficient compound KdV-Burgers equation. Appl. Math. Model. 73, 695–714 (2019)
Xie, X.Y., Meng, G.Q.: Dark solitons for a variable-coefficient AB system in the geophysical fluids or nonlinear optics. Eur. Phys. J. Plus 134, 359 (2019)
Zhao, X.H., Tian, B., Xie, X.Y., Wu, X.Y., Sun, Y., Guo, Y.J.: Solitons, Backlund transformation and Lax pair for a (\(2+1\))-dimensional Davey-Stewartson system on surface waves of finite depth. Wave. Random Complex 28, 356 (2018)
Sun, Y., Tian, B., Liu, L., Wu, X.Y.: Rogue waves for a generalized nonlinear Schrödinger equation with distributed coefficients in a monomode optical fiber. Chaos, Solitons Fractals 107, 266 (2018)
Lan, Z.Z., Gao, B.: Lax pair, infinitely many conservation laws and solitons for a (\(2 +1\))-dimensional Heisenberg ferromagnetic spin chain equation with time-dependent coefficients. Appl. Math. Lett. 79, 6–12 (2018)
Lan, Z.Z.: Multi-soliton solutions for a (\(2+ 1\))-dimensional variable-coefficient nonlinear Schrödinger equation. Appl. Math. Lett. 86, 243–248 (2018)
Hammack, J., Scheffner, N., Segur, H.: Two-dimensional periodic waves in shallow water. J. Fluid Mech. 209, 567–589 (1989)
Wang, M., Tian, B., Sun, Y., Yin, H.M., Zhang, Z.: Mixed lump-stripe, bright rogue wave-stripe, dark rogue wave stripe and dark rogue wave solutions of a generalized Kadomtsev-Petviashvili equation in fluid mechanics. Chin. J. Phys. 60, 440–449 (2019)
Lonngren, K.E.: Ion acoustic soliton experiments in a plasma. Opt. Quantum Electron. 30, 615–630 (1998)
Tsuchiya, S., Dalfovo, F., Pitaevskii, L.: Solitons in two-dimensional Bose-Einstein condensates. Phys. Rev. A 77, 045601 (2008)
Lan, Z.Z.: Periodic, breather and rogue wave solutions for a generalized (\(3+1\))-dimensional variable-coefficient B-type Kadomtsev-Petviashvili equation in fluid dynamics. Appl. Math. Lett. 94, 126–132 (2019)
Date, E., Jimbo, M., Kashiwara, M.: A new hierarchy of soliton equations of KP-type. Phys. D 4, 343–365 (1982)
Hu, C.C., Tian, B., Wu, X.Y., Du, Z., Zhao, X.H.: Lump wave-soliton and rogue wave-soliton interactions for a (\(3+1\))-dimensional B-type Kadomtsev-Petviashvili equation in a fluid. Chin. J. Phys. 56, 2395 (2018)
Hu, C.C., Tian, B., Wu, X.Y., Yuan, Y.Q., Du, Z.: Mixed lump-kink and rogue wave-kink solutions for a (\(3+1\))-dimensional B-type Kadomtsev-Petviashvili equation in fluid mechanics. Eur. Phys. J. Plus 133, 40 (2018)
Asaad, M.G., Ma, W.X.: Pfaffian solutions to a (\(3+1\))-dimensional generalized B-type Kadomtsev-Petviashvili equation and its modified counterpart. Appl. Math. Comput. 218, 5524–5542 (2012)
Sun, Y., Tian, B., Liu, L.: Rogue waves and lump solitons of the (\(3+ 1\))-dimensional generalized B-type Kadomtsev-Petviashvili equation for water waves. Commun. Theor. Phys. 68, 693 (2017)
Ma, W.X., Zhu, Z.: Solving the (\(3+ 1\))-dimensional generalized KP and BKP equations by the multiple exp-function algorithm. Appl. Math. Comput. 218, 11871–11879 (2012)
Ma, W.X., Fan, E.: Linear superposition principle applying to Hirota bilinear equations. Comput. Math. Appl. 61, 950–959 (2011)
Chabchoub, A., Hoffmann, N., Onorato, M.: Super rogue waves: observation of a higher-order breather in water waves. Phys. Rev. X 2, 011015 (2012)
Dudley, J.M., Genty, G., Dias, F.: Modulation instability, Akhmediev Breathers and continuous wave supercontinuum generation. Opt. Express 17, 21497–21508 (2009)
Du, Z., Tian, B., Chai, H.P., Yuan, Y.Q.: Vector multi-rogue waves for the three-coupled fourth-order nonlinear Schrodinger equations in an alpha helical protein. Commun. Nonlinear Sci. Numer. Simulat. 67, 49 (2019)
Du, Z., Tian, B., Chai, H.P., Sun, Y., Zhao, X.H.: Rogue waves for the coupled variable-coefficient fourth-order nonlinear Schrodinger equations in an inhomogeneous optical fiber. Chaos, Solitons Fractals 109, 90 (2018)
Sun, Y., Tian, B., Liu, L., Wu, X.Y.: Rogue waves for a generalized nonlinear Schrodinger equation with distributed coefficients in a monomode optical fiber. Chaos, Solitons Fractals 107, 266 (2018)
Russell, F.M., Archilla, J.F.R., Frutos, F.: Infinite charge mobility in muscovite at 300 K. EPL 120, 46001 (2012)
Akhmediev, N., Soto-Crespo, J.M., Ankiewicz, A.: How to excite a rogue wave. Phys. Rev. A 80, 043818 (2009)
Wazwaz, A.M.: Multiple soliton solutions and multiple complex soliton solutions for two distinct Boussinesq equations. Nonlinear Dyn. 85, 731–737 (2016)
Wazwaz, A.M., El-Tantawy, S.A.: Solving the (\(3+1\))-dimensional KP-Boussinesq and BKP-Boussinesq equations by the simplified Hirota’s method. Nonlinear Dyn. 88, 3017–3021 (2017)
Satsuma, J., Ablowitz, M.J.: Two-dimensional lumps in nonlinear dispersive systems. J. Math. Phys. 20, 1496–1503 (1979)
Ma, W.X.: Lump solutions to the Kadomtsev-Petviashvili equation. Phys. Lett. A 379, 1975–1978 (2015)
Zhang, J., Ma, W.X.: Mixed lump-kink solutions to the BKP equation. Comput. Math. Appl. 74, 591–596 (2017)
Peregrine, D.H.: Water waves, nonlinear Schrödinger equations and their solutions. ANZIAM J. 25, 16–43 (1983)
Akhmediev, N., Ankiewicz, A., Soto-Crespo, J.M.: Rogue waves and rational solutions of the nonlinear Schrödinger equation. Phys. Rev. E 80, 026601 (2009)
Bludov, Y.V., Konotop, V.V., Akhmediev, N.: Vector rogue waves in binary mixtures of Bose-Einstein condensates. Eur. Phys. J. Spec. Top. 185, 169–180 (2010)
Lan, Z.Z., Su, J.J.: Solitary and rogue waves with controllable backgrounds for the non-autonomous generalized AB system. Nonlinear Dyn. 96, 2535–2546 (2019)
Ma, Y.L.: Interaction and energy transition between the breather and rogue wave for a generalized nonlinear Schrödinger system with two higher-order dispersion operators in optical fibers. Nonlinear Dyn. https://doi.org/10.1007/s11071-019-04956-0
Chen, S.S., Tian, B., Sun, Y., Zhang, C.R.: Generalized Darboux transformations, rogue waves, and modulation instability for the coherently coupled nonlinear Schrödinger equations in nonlinear optics. Ann. Phys. (2019). https://doi.org/10.1002/andp.201900011
Chen, S.S., Tian, B., Liu, L., Yuan, Y.Q., Zhang, C.R.: Conservation laws, binary Darboux transformations and solitons for a higher-order nonlinear Schrödinger system. Chaos, Solitons Fractals 118, 337 (2019)
Zhang, C.R., Tian, B., Wu, X.Y., Yuan, Y.Q., Du, X.X.: Rogue waves and solitons of the coherently coupled nonlinear Schrödinger equations with the positive coherent coupling. Phys. Scr. 93, 095202 (2018)
Zhang, C.R., Tian, B., Liu, L., Chai, H.P., Du, Z.: Vector breathers with the negatively coherent coupling in a weakly birefringent fiber. Wave Motion 84, 68 (2019)
Akhmediev, N.N., Korneev, V.I.: Modulation instability and periodic solutions of the nonlinear Schrödinger equation. Theor. Math. Phys. 69, 1089–1093 (1986)
Ma, Y.C.: The perturbed plane-wave solutions of the cubic Schrödinger equation. Stud. Appl. Math. 60, 43–58 (1979)
Zhang, X.E., Chen, Y.: Deformation rogue wave to the (\(2+1\))-dimensional KdV equation. Nonlinear Dyn. 90, 755–763 (2017)
Zhang, X.E., Chen, Y.: General high-order rogue wave to NLS-Boussinesq equation with the dynamical analysis. Nonlinear Dyn. https://doi.org/10.1007/s11071-018-4317-8
Zakharov, V.E., Dyachenko, A.I.: About shape of giant breather. Eur. J. Mech. B 29, 127–131 (2010)
Zakharov, V.E., Kuznetsov, E.A.: Multi-scale expansions in the theory of systems integrable by the inverse scattering transform. Phys. D 69, 455–463 (1986)
Gao, X.Y.: Looking at a nonlinear inhomogeneous optical fiber through the generalized higher-order variable-coefficient Hirota equation Appl. Math. Lett. 73, 143 (2017)
Gao, X.Y.: Mathematical view with observational/experimental consideration on certain (\(2+1\))-dimensional waves in the cosmic/laboratory dusty plasmas. Appl. Math. Lett. 91, 165 (2019)
Dysthe, K.B., Trulsen, K.: Note on breather type solutions of the NLS as models for freak-waves. Phys. Scr. 82, 48 (1999)
Kedziora, D.J., Ankiewicz, A., Akhmediev, N.: Second-order nonlinear Schrödinger equation breather solutions in the degenerate and rogue wave limits. Phys. Rev. E 85, 066601 (2012)
Ablowitz, M.J., Satsuma, J.: Solitons and rational solutions of nonlinear evolution equations. J. Math. Phys. 19, 2180–2186 (1978)
Hirota, R.: The Direct Method in Soliton Theory. Cambridge University Press, Cambridge (2004)
Ohta, Y., Yang, J.: Rogue waves in the Davey-Stewartson I equation. Phys. Rev. E 86, 036604 (2012)
Ohta, Y., Yang, J.: General high-order rogue waves and their dynamics in the nonlinear Schrödinger equation. Proc. R. Soc. A 468, 1716–1740 (2012)
Yuan, Y.Q., Tian, B., Liu, L., Wu, X.Y., Sun, Y.: Solitons for the (\(2+1\))-dimensional Konopelchenko-Dubrovsky equations. J. Math. Anal. Appl. 460, 476 (2018)
Jimbo, M., Miwa, T.: Solitons and infinite dimensional Lie algebras. Publ. Res. Inst. Math. Sci. 19, 943–1001 (1983)
Zhang, X., Xu, T., Chen, Y.: Hybrid solutions to Mel’nikov system. Nonlinear Dyn. https://doi.org/10.1007/s11071-018-4528-z
Osborne, A.R.: Classification of homoclinic rogue wave solutions of the nonlinear Schrödinger equation. Nat. Hazard Earth Syst. 2, 897–933 (2014)
Ablowitz, M.J., Herbst, B.M.: On homoclinic structure and numerically induced chaos for the nonlinear Schrödinger equation. SIAM J. Appl. Math. 50, 339–351 (1990)
Acknowledgements
We express our sincere thanks to all the members of our discussion group for their valuable comments. This work has been supported by the National Natural Science Foundation of China under Grant No. 11272023 and by the Fundamental Research Funds for the Central Universities under Grant No. 50100002016105010.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
According to the procedure in [61], we take
where the asterisk “\(*\)” indicates the complex conjugate, \(\varLambda _k\)’s, \(r_k^0\)’s and \(s_k^0\)’s are the complex constants, \(\lambda _k\)’s are the real constants for \(k=1,2, \ldots , M\) and \(M=N/2\). Combining the above assumptions and Eq. (7), we can obtain the Mth-order breather solutions for Eq. (1) as
where \(f=\varDelta |F_{k,l}|_{1\le k,l\le M}\) and \(\varDelta =e^{\begin{matrix} \sum _{i=1}^M (\zeta _i+\zeta _i^*) \end{matrix} }\begin{matrix} \prod _{k=1}^M \lambda _k^2 \end{matrix}\), and the matrix elements are defined as
where \(\zeta _k^0=r_k^0+s_k^0\).
Appendix B
Based on the long-wave limit method [33, 55], we will derive the rational solutions for Eq. (1). Setting \(e^{\zeta _k^0}=-\,1\), and taking the long-wave limit \(\lambda _k\rightarrow 0\), we can construct the rational solutions for Eq. (1) as
where \(f=|F_{k,l}|\), and the matrix elements are defined as
with
Appendix C
We have derived the rational- and exponent- type solutions for Eq. (1) in Appendices A and B. Combining the above two kinds of solutions, we can obtain the hybrid solutions for Eq. (1) as
where \(f=\varDelta |F_{k,l}|\), \(\varDelta =e^{\sum _{k={\widetilde{N}}+1}^{{\widetilde{N}}+{\widehat{N}}} (\zeta _k+\zeta _k^*)}\prod _{k={\widetilde{N}}+1}^{{\widetilde{N}}+{\widehat{N}}} \lambda _k^2\), \(\widetilde{N}\) and \(\widehat{N}\) are the positive integers, the relevant determinant is defined as
A is a \(2{\widetilde{N}}\times 2{\widetilde{N}}\) matrix with its matrix elements defined as
B and C are the \(2{\widetilde{N}}\times 2{\widehat{N}}\) and \(2{\widehat{N}}\times 2{\widetilde{N}}\) matrices, respectively, with their matrix elements defined as
D is a \(2{\widehat{N}}\times 2{\widehat{N}}\) matrix with its matrix elements defined as
and
Appendix D
We assume that
Combining the above assumptions and Eq. (7), we can obtain the Mth-order kinky breather solutions for Eq. (1) as
where \(f=\varDelta |F_{k,l}|\) and \(\varDelta =e^{\begin{matrix} \sum _{i=1}^M (\zeta _i+\zeta _i^*) \end{matrix} }\begin{matrix} \prod _{k=1}^M \lambda _k^2 \end{matrix}\), and the matrix elements are defined as
where \(\zeta _k^0=r_k^0+s_k^0\).
Appendix E
Similar to those in Appendix C, we can construct the hybrid solutions for Eq. (1) as
where \(f=\varDelta |F_{k,l}|\), \(\varDelta =e^{\sum _{k={\widetilde{N}}+1}^{{\widetilde{N}}+{\widehat{N}}} (\zeta _k+\zeta _k^*)}\prod _{k={\widetilde{N}}+1}^{{\widetilde{N}}+{\widehat{N}}} \lambda _k^2\), the relevant determinant is defined as
A is a \(2{\widetilde{N}}\times 2{\widetilde{N}}\) matrix with its matrix elements defined as
B and C are the \(2{\widetilde{N}}\times 2{\widehat{N}}\) and \(2{\widehat{N}}\times 2{\widetilde{N}}\) matrices, respectively, with their matrix elements defined as
D is a \(2{\widehat{N}}\times 2{\widehat{N}}\) matrix with its matrix elements defined as
and
Rights and permissions
About this article

Cite this article
Ding, CC., Gao, YT. & Deng, GF. Breather and hybrid solutions for a generalized (3 + 1)-dimensional B-type Kadomtsev–Petviashvili equation for the water waves. Nonlinear Dyn 97, 2023–2040 (2019). https://doi.org/10.1007/s11071-019-05093-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-019-05093-4