
Abstract
Under investigation in this paper is the \((3+1)\)-dimensional B-type Kadomtsev–Petviashvili–Boussinesq (BKP–Boussinesq) equation, which can display the nonlinear dynamics in fluid. By using Bell’s polynomials, we explicitly derive a bilinear equation for the equation via a very natural and effective way. Then, three types of exchange identities of Hirota’s bilinear operators are presented to derive its Bäcklund transformation. Based on that, we construct the traveling wave solutions, kink solitary wave solutions, rational breathers and rogue waves of the equation. Finally, some properties of interaction phenomena are also provided, which can be used to study the domain of lump solutions. It is hoped that our results can be used to enrich the dynamical behavior of the \((3+1)\)-dimensional nonlinear evolution equations.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In recent years, the nonlinear evolution equations (NLEEs) have attracted an increasingly attention from mathematics and physicists. It is well known that the research of nonlinear physics phenomena is a very interesting topic. NLEEs can display many interesting nonlinear dynamic behaviors, such as plasma physics, optical fibers, chaos theory, hydrodynamics and other nonlinear fields. The properties corresponding to NLEEs are flourishing, including integrability, dispersion effects, solitary wave solutions, bilinear expressions, periodic wave solutions. There are many works for the NLEEs in this field [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15].
A variety of straightforward methods can be used to solve the NLEEs. For instance, inverse scattering transformation (IST) [16], Darboux transformation (DT) [17], Hirota’s bilinear method (HBM) [18], Lie group symmetry (LGS) [19, 20], multiple exp-function method [21], etc.
As we know that the most classic Kadomtsev–Petviashvili (KP)-type equation [22] reads
which can characterize the growth of shallow water waves in quasi one-dimension, with the weak influence of surface tension and viscosity. There are many KP-type equations. For example, a \((3+1)\)-dimensional B-type KP equation (BKP) [23] is presented by
When \(y=z\), it can be read the \((2+1)\)-dimensional BKP equation, which has a great influence in both the phase shift and the dispersion connection of each extended nonlinear evolution equation. There are many works to study the multiple wave solutions and lump solutions, Bäcklund transformation and shock wave type solutions for such kind of equations [24,25,26,27,28,29,30].
In this work, we mainly study a \((3+1)\)-dimensional BKP–Boussinesq equation [31] given by
where u is a differential function about x, y, z and t. It is easy to find that the \((3+1)\)-dimensional BKP–Boussinesq equation denotes the \((3+1)\)-dimensional BKP equation plus a partial derivative of u with respect to t, i.e. \(u_{tt}\). The equation is proposed by Wazwaz and El-Tantawy [31]. This equation possesses the properties of both Boussinesq and BKP equations, which can be used to depict the propagation of long waves in shallow water. It also describes other waves, such as nonlinear lattice waves, iron sound waves in a plasma. Furthermore, it has many applications in physical field, such as the percolation of water in porous subsurface of a horizontal layer of material. Actually, BKP–Boussinesq equation plays an important role in describing the processes of interaction of exponentially localized structures. A bilinear representation belong to the equation is presented. We know that the equation can depict more interesting phenomena than other KP-type equations.
To the best of our knowledge, the lump solutions in NLEEs have attracted more and more attention, which are reflected in the interaction phenomena between lump solutions and other rational solutions, such as [32,33,34,35,36,37,38,39,40,41]. The main goal in this paper is to derive its traveling wave solutions by a Bäcklund transformation method, and obtain rogue wave solutions and interaction phenomena between the double kink solitary waves and lump solution by using a bilinear expression of (3).
The structure of this paper is as follows. In Sect. 2, based on the Hirota’s bilinear method and Bell’s polynomial theory, we compute the bilinear representation for the \((3+1)\)-dimensional BKP–Boussinesq equation. Then, in Sect. 3, its Bäcklund transformation is presented by using a bilinear equation. Moreover, according to a group of Bäcklund transformation formulas, we also get the corresponding traveling wave solutions of the equation. Section 4 uses an ansätz function to obtain rogue wave solutions and rational breather waves for the Eq. (3). In Sect. 5, we present its one-, two- and N-kink solitary wave solutions in a very natural way. In Sect. 6, by virtue of a special function, we find the interaction solutions between lump and other waves.
2 Bilinear representation
Let us introduce the following potential transformation
where c is a constant. Taking \(c=1\), substituting (4) into (3), and integrating the result with respect to x once, then one obtains
where \(\sigma \) is an integrable constant. Based on the results provided in Refs. [42,43,44,45,46,47,48,49,50,51,52,53], and we obtain \(E(q)=P_{ty}-P_{xxxy}+P_{tt}+3P_{xz}=\sigma \). Supposing \(\sigma =0\), we have
with the following variable transformation
Then one obtains
where F is a real function about x, y, z and t. \(D_{s}\) \((s=x, y, z, t)\) denote some Hirota’s bilinear operators [18].
3 Bäcklund transformation and traveling wave solutions
3.1 Bilinear Bäcklund transformation
In order to derive the Bäcklund transformation of Eq. (3), we assume that there exists another real function solution in bilinear Eq. (8); then, we can obtain a similar bilinear form as
By constructing a key function given by
and supposing \(M=0\), we have
According to above equation, we can show that \(f'\) can be used to solve the Eq. (8) if and only if \(f'\) also denotes a solution of Eq. (9). By exchanging the dependent variables f and \(f'\), Eq. (10) satisfies \(M=0\). Next, we introduce several types of exchange formulas for bilinear operator as follows [18]
where \(i,j=x,y,z,t\). It is easy to find that
Based on the exchange formulas (12)–(14) of bilinear operators, the Bäcklund transformation related to the Eq. (3) are given by
We provide the detailed calculation as follows
For the above reduction and \(D_{i}ff=0\), the parameters \(\epsilon _{i}, (i=2,3,5,6,7)\) will be equal to zero. Based on the expression (14), we can obtain \(\epsilon _{j}=0, (j=1,4,8,9)\).

(Color online) Rational solution (23) for Eq. (3) by choosing suitable parameters: \({\hat{a}}_{1}=1,{\hat{a}}_{2}=1.2,{\hat{a}}_{3}=0.9,{\hat{a}}_{4}=2.1,z=0,t=3\). a Perspective view of the real part of the wave. b The overhead view of the wave. c The wave propagation pattern of the wave along the x axis
3.2 Traveling wave solutions
Let us substitute a solution \(f=1\) into the \((3+1)\)-dimensional BKP–Boussinesq Eq. (3), which is reduced to the initial variable u with \(u=2(\ln f)_{x}=0\). One has
The Bäcklund transformation (15) related to \(f=1\) will be a group of linear equations given by
We introduce a function given by
where \({\hat{a}}_{1}, {\hat{a}}_{2}, {\hat{a}}_{3}, {\hat{a}}_{4}\) are some constants. Taking \(\epsilon _{2}, \epsilon _{4}, \epsilon _{6}=0\) to the above equations (18), then one has
So, we obtain the following exponential wave solution
where \(f'=1+\mu \exp \left[ {\hat{a}}_{1}x+{\hat{a}}_{2}y+ \frac{\epsilon _{8}{\hat{a}}_{1}{\hat{a}}_{4} -{\hat{a}}_{1}^{3}{\hat{a}}_{2}+{\hat{a}}_{2}{\hat{a}}_{4}+\epsilon _{9}{\hat{a}}_{2}{\hat{a}}_{4}}{3{\hat{a}}_{1}}z-(\epsilon _{8}{\hat{a}}_{1}+\epsilon _{9}{\hat{a}}_{2})t\right] \). Then above u solves the BKP–Boussinesq Eq. (3).
Next, we use a first-order function as follows
by substituting (22) into a class of equations (18), and taking \(\epsilon _{i}=0,(2\le i\le 7)\). The Eq. (18) are limited by \(({\hat{a}}_{4}-{\hat{a}}_{2}){\hat{a}}_{4}-3{\hat{a}}_{1}{\hat{a}}_{3}=0\), which satisfies the existence of \(\epsilon _{1}, \epsilon _{8}\) and \(\epsilon _{9}\). We can obtain the following rational solution of the BKP–Boussinesq equation
The graphic of the rational solution (23) for Eq. (3) is plotted in Fig. 1 by choosing suitable parameters.

4 Rogue wave solutions
In order to seek the rogue wave solutions for the BKP–Boussinesq equation, we assume that
where \(m_{i} (i=1,2,3,4,5,6,7)\) are free constants. Substituting the ansätz (24) into the bilinear Eq. (8), with the aid of mathematica, one can obtain the following results
Then, substituting (24) and (25) into \(u=[\ln F]_{x}\) yields the following solutions
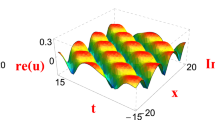
For the solution (26), we call it as the new-type rational breather wave solution [27]. By choosing appropriate parameters, its graph is plotted in Fig. 2. We can show that Fig. 2a exists a pair of peaks in the opposite direction. Furthermore, it is also called as the bright and dark soliton waves. We can see that its one down wave locates below the plane wave. Then, it can be said that the rational breather wave is not a kinky wave. Actually, the wave is a local form in the (x, t) plane. There exist two similar wave shapes of the rogue wave. So it can also be called as the two-dimensional rogue wave for Eq. (3).
We consider
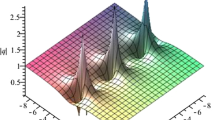
It is not hard to find that \({\tilde{u}}\) is also a solution of Eq. (3). By choosing proper parameters, we provide one group of graphs related to the solution (27) shown in Fig. 3. It is a rogue wave form. We can find that upper dominant peak and two holes exist in Fig. 3a. Its velocity, amplitude and width keep unchanged, in the process of propagation. We also find that the symmetry of rogue wave will be influenced by some parameters. Moreover, it is the highest wave in these waves, and forming in a very short time. Figure 3b shows its density. Then, Fig. 3c depicts the corresponding amplitude of \({\tilde{u}}\) in different time.

5 Multi kink solitary wave solutions
In this part, we consider the kink solitary wave solutions for Eq. (3) by expanding F about the small parameter \(\epsilon \) given by
Substituting (28) into (8) and equating the coefficients of all powers of \(\epsilon ^{n}\) to zero, one has
From the formula (29), we can obtain a solution of F given by
in which \(\xi _{1}=k_{1}x+l_{1}y+\alpha _{1}z+\omega _{1}t+\delta _{1}\). Substituting F into bilinear form (8), we get \(\omega _{1}=\frac{-l_{1}\pm \sqrt{l_{1}^{2}+4k_{1}^{2}l_{1}-12k_{1}\alpha _{1}}}{2}\), (\(\triangle =l_{1}^{2}+4k_{1}^{2}l_{1}-12k_{1}\alpha _{1}\ge 0\)). Taking \(F^{(2)}=F^{(3)}=\cdots =0\), then one kink soliton solution is given by


(Color online) Double kink soliton solution (34) for Eq. (3) by choosing suitable parameters: \(k_{1}=-\,1.1,k_{2}=1,l_{1}=1,l_{2}=2,\alpha _{1}=2,\xi _{2}=-\,1.1,\alpha _{2}=2,\omega _{1}=1,\omega _{2}=-\,2,\delta _{1}=-\,1.2,\delta _{2}=-\,1\). a Perspective view of the real part of the wave. b The overhead view of the wave. c The wave propagation pattern of the wave along the x axis
According to the above way, one can find the double kink soliton solutions of (3) as follows
where \(k_{i},l_{i},\alpha _{i},\delta _{i}\) are some constants \((i=1,2)\).
Similarly, the N-kink solitary wave solutions are derived by
The graphics of one kink soliton solution (33) and double kink soliton solutions (34) for Eq. (3) are plotted in Figs. 4 and 5 by choosing suitable parameters.
6 Interaction phenomena
In this section, by considering the characteristics of interaction between lump and kink wave solutions, we discuss their corresponding phenomena. By introducing a dependent transformation \(u=2(\ln f)_{x}\), and based on the Bell’s polynomial theory [42, 46, 47], we can also obtain the same bilinear form of \((3+1)\)-dimensional BKP–Boussinesq equation
In order to construct the interaction solutions, based on the results in [33, 39], we take following form
where g, h and m are, respectively, expressed by
and \(a_{i}, (i=1,2,\ldots ,11)\), \(k, k_{1}, k_{2}, k_{3}, k_{4}\) are all the real parameters. Substituting Eqs. (42)–(44) into the bilinear Eq. (40), then we obtain a polynomial equation about x, y, z and t. Collecting the coefficients of the terms, such as \(x, y, z, t, \cosh (m)\) and \(\sinh (m)\), and taking them to be zero, we get a class of algebraic equations. Solving them, two cases about these parameters are derived. Substituting the limitations in Cases 1 and 2 into the Eq. (41) and \(u=2(\ln f)_{x}\), we can obtain these interaction solutions between lump and kink wave solutions for the BKP–Boussinesq equation.
Case 1. The limitations are provided by
Then, we get the interaction solution as follows
The graphic of the interaction solution (46) for Eq. (3) is plotted in Fig. 6 by choosing suitable parameters.

(Color online) Interaction solution (46) for Eq. (3) by choosing suitable parameters: \(a_{2}=\frac{7200}{1357},a_{3}= 1,a_{4}=3,a_{6}=12,a_{7}=-\frac{1}{68},a_{8}=1,a_{9}=1,k=2,k_{1}= \frac{5}{6},k_{3}=2,k_{4}= 2,(c1)~ t=-\,3,(c2)~ t=0,(c3)~ t=3\). a Perspective view of the real part of the wave. b Contour plot. c The wave propagation pattern of the wave along the x axis
Case 2. The limitations are provided by
Then, we get the corresponding interaction solution as follows
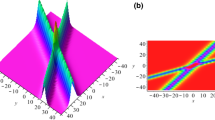
The graphic of the interaction solution (48) for Eq. (3) is plotted in Fig. 7 by choosing suitable parameters.

(Color online) Interaction solution (48) for Eq. (3) by choosing suitable parameters: \(a_{2}=7,a_{5}=1,a_{6}=12,a_{7}=1,k=2,k_{1}=\frac{5}{6},k_{3}=\frac{2}{3},k_{4}=1,(c4)~t=-\,8,(c5)~t=0,(c6)~t=8\). a Perspective view of the real part of the wave. b Contour plot. c The wave propagation pattern of the wave along the x axis
As shown in Figs. 6 and 7, in a certain period of time, we can see that the kink waves exist in (x, y) plane. Then, the lump appears from them, and continuously removes in the double kink waves. In reality, the oscillation amplitude of lump starts to increase at a moment, and detaches from one of the kink waves. It is a gradual process, which can be reflected in Fig. 7. From Figs. 6a2–b2, 7a2–b2, when \(t=0\), the level of separation reaches to a peak. Besides, lump locates in the center of double kink waves. Then, we find that the lump slowly closes to the another kink wave. Its oscillation amplitude gradually reduces with the distance of the lump and the kink wave getting smaller and smaller. Finally, the kink wave swallows the lump. The double kink waves will revert to the initial state. We can see that the velocity of final lump will become smaller than its initial state. Maybe it is affected by the kink solitary waves.
7 Conclusions and discussion
In this work, we have systematically investigated the \((3+1)\)-dimensional BKP–Boussinesq equation. By using the Hirota’s bilinear method, we have derived the bilinear expression and Bäcklund transformation of the equation. Based on that, we have obtained its traveling wave solutions, including rational solutions and exponential wave solutions. Furthermore, an effective way is proposed to get its kink solitary wave solutions, rational breather solution and rogue wave solution. Finally, we have shown that a special function can be provided to get the interaction solutions between the lump and double kink waves.
From our results obtained in this paper, the method presented here has been proved to be a very effective method for finding analytical solutions of NLEEs. It is hoped that our results can enrich the theories for the associated NLEEs in mathematical physics.
References
Wang, D.S., Wei, X.Q.: Integrability and exact solutions of a two-component Korteweg–de Vries system. Appl. Math. Lett. 51, 60 (2016)
Dai, C.Q., Huang, W.H.: Multi-rogue wave and multi-breather solutions in PT-symmetric coupled waveguides. Appl. Math. Lett. 32, 35 (2014)
Wazwaz, A.M.: Partial Differential Equations: Methods and Applications. Balkema Publishers, Amsterdam (2002)
Wazwaz, A.M.: Gaussian solitary wave solutions for nonlinear evolution equations with logarithmic nonlinearities. Nonlinear Dyn. 83, 591–596 (2016)
Wazwaz, A.M., Xu, G.Q.: Negative-order modified KdV equations: multiple soliton and multiple singular soliton solutions. Math. Methods Appl. Sci. 39(4), 661–667 (2016)
Wang, L., Zhang, J.H., Wang, Z.Q., Liu, C., Li, M., Qi, F.H., Guo, R.: Breather-to-soliton transitions, nonlinear wave interactions, and modulational instability in a higher-order generalized nonlinear Schrödinger equation. Phys. Rev. E 93, 012214 (2016)
Guo, R., Hao, H.Q.: Breathers and localized solitons for the Hirota–Maxwell–Bloch system on constant backgrounds in erbium doped fibers. Ann. Phys. 344, 10–16 (2014)
Feng, L.L., Zhang, T.T.: Breather wave, rogue wave and solitary wave solutions of a coupled nonlinear Schrödinger equation. Appl. Math. Lett. 78, 133–140 (2018)
Tian, S.F.: The mixed coupled nonlinear Schrödinger equation on the half-line via the Fokas method. Proc. R. Soc. Lond. A 472, 20160588 (2016). (22 pp)
Yu, F.J.: Dynamics of nonautonomous discrete rogue wave solutions for an Ablowitz–Musslimani equation with PT-symmetric potential. Chaos 27, 023108 (2017)
Yu, F.J.: Nonautonomous rogue waves and ‘catch’ dynamics for the combined Hirota–LPD equation with variable coefficients. Commun. Nonlinear Sci. Numer. Simul. 34, 142–153 (2016)
Tian, S.F.: Initial-boundary value problems of the coupled modified Korteweg–de Vries equation on the half-line via the Fokas method. J. Phys. A: Math. Theor. 50, 395204 (2017)
Tu, J.M., Tian, S.F., Xu, M.J., Zhang, T.T.: On Lie symmetries, optimal systems and explicit solutions to the Kudryashov–Sinelshchikov equation. Appl. Math. Comput. 275, 345–352 (2016)
Tian, S.F., Zhang, Y.F., Feng, B.L., Zhang, H.Q.: On the Lie algebras, generalized symmetries and Darboux transformations of the fifth-order evolution equations in shallow water. Chin. Ann. Math. B. 36(4), 543–560 (2015)
Tian, S.F.: Initial-boundary value problems for the general coupled nonlinear Schrödinger equations on the interval via the Fokas method. J. Differ. Equ. 262, 506–558 (2017)
Ablowitz, M.J., Clarkson, P.A.: Solitons; Nonlinear Evolution Equations and Inverse Scattering. Cambridge University Press, Cambridge (1991)
Matveev, V.B., Salle, M.A.: Darboux Transformation and Solitons. Springer, Berlin (1991)
Hirota, R.: The Direct Method in Soliton Theory. Cambridge University Press, Cambridge (2004)
Bluman, G.W., Kumei, S.: Symmetries and Differential Equations. Springer, New York (1989)
Olver, P.J.: Applications of Lie Groups to Differential Equations, 2nd edn. Springer, New York (1993)
Ma, W.X., Huang, T.W., Zhang, Y.: A multiple exp-function method for nonlinear differential equations and its application. Phys. Scr. 82, 065003 (2010)
Johnson, R.S., Thompson, S.: A solution of the inverse scattering problem for the Kadomtsev–Petviashvili equation by the method of separation of variables. Phys. Lett. 66A(4), 279–281 (1978)
Wazwaz, A.M.: Two forms of (3+ 1)-dimensional B-type Kadomtsev–Petviashvili equation: multiple soliton solutions. Phys. Scr. 86(3), 035007 (2012)
Ma, W.X., Zhu, Z.N.: Solving the \((3+1)\)-dimensional generalized KP and BKP equations by the multiple \(exp\)-function algorithm. Appl. Math. Comput. 218, 11871–11879 (2012)
Feng, L.L., Tian, S.F., Wang, X.B., Zhang, T.T.: Rogue waves, homoclinic breather waves and soliton waves for the \((2+1)\)-dimensional B-type Kadomtsev–Petviashvili equation. Appl. Math. Lett. 65, 90–97 (2017)
Wang, X.B., Tian, S.F., Qin, C.Y., Zhang, T.T.: Characteristics of the breathers, rogue waves and solitary waves in a generalized \((2+1)\)-dimensional Boussinesq equation. EPL 115, 10002 (2016)
Wang, X.B., Tian, S.F., Yan, H., Zhang, T.T.: On the solitary waves, breather waves and rogue waves to a generalized \((3+1)\)-dimensional Kadomtsev–Petviashvili equation. Comput. Math. Appl. 74, 556–563 (2017)
Wang, X.B., Tian, S.F., Qin, C.Y., Zhang, T.T.: Dynamics of the breathers, rogue waves and solitary waves in the \((2+1)\)-dimensional Ito equation. Appl. Math. Lett. 68, 40–47 (2017)
Gilson, C.R., Nimmo, J.J.C.: Lump solutions of the BKP equations. Phys. Lett. A 147(8–9), 472–476 (1990)
Gao, X.Y.: Bäcklund transformation and shock-wave-type solutions for a generalized \((3+1)\)-dimensional variable-coefficients B-type Kadomtsev–Petviashvili equation in fluid mechanics. Ocean Eng. 96, 245–247 (2015)
Wazwaz, A.M., El-Tantawy, S.A.: Solving the \((3+1)\)-dimensional KP–Boussinesq and BKP–Boussinesq equations by the simplified Hirota’s method. Nonlinear Dyn. 88, 3017–3021 (2017)
Wang, X.B., Tian, S.F., Qin, C.Y., Zhang, T.T.: Characteristics of the solitary waves and rogue waves with interaction phenomena in a generalized \((3+1)\)-dimensional Kadomtsev–Petviashvili equation. Appl. Math. Lett 72, 58–64 (2017)
Lu, Z., Tian, E.M., Grimshaw, R.: Interaction of two lump solitons described by the Kadomtsev–Petviashvili I equation. Wave Motion 40, 123–135 (2004)
La, Z., Chen, Y.: Construction of rogue wave and lump solutions for nonlinear evolution equations. Eur. Phys. J. B 88, 187 (2015)
Yang, J.Y., Ma, W.X.: Lump solutions to the BKP equation by symbolic computation. Int. J. Mod. Phys. B 30, 1640028 (2016)
Ma, W.X., Qin, Z.Y., La, X.: Lump solutions to dimensionally reduced p-gKP and p-gBKP equations. Nonlinear Dyn. 84, 923–31 (2016)
Ma, W.X., You, Y.: Solving the Korteweg–de Vries equation by its bilinear form: Wronskian solutions. Trans. Am. Math. Soc. 357, 1753–1778 (2005)
Ma, W.X., Li, C.X., He, J.: A second Wronskian formulation of the Boussinesq equation. Nonlinear Anal. 70, 4245–4258 (2009)
Fokas, A.S., Pelinovsky, D.E., Sulaem, C.: Interaction of lumps with a line soliton for the DSII equation. Phys. D 152–153, 189–198 (2001)
Nistazakis, H.E., Frantzeskakis, D.J., Malomed, B.A.: Collisions between spatiotemporal solitons of different dimensionality in a planar waveguide. Phys. Rev. E 64, 026604 (2001)
Wang, C.J., Dai, Z.D., Liu, C.F.: Interaction between kink solitary wave and Rogue wave for \((2+1)\)-dimensional Burgers equation. Mediterr. J. Math. 13, 1087–1098 (2016)
Tian, S.F., Zhang, H.Q.: On the integrability of a generalized variable-coefficient Kadomtsev–Petviashvili equation. J. Phys. A: Math. Theor. 45, 055203 (2012)
Tian, S.F., Zhang, H.Q.: Riemann theta functions periodic wave solutions and rational characteristics for the nonlinear equations. J. Math. Anal. Appl. 371, 585–608 (2010)
Tu, J.M., Tian, S.F., Xu, M.J., Song, X.Q., Zhang, T.T.: Bäcklund transformation, infinite conservation laws and periodic wave solutions of a generalized \((3+1)\)-dimensional nonlinear wave in liquid with gas bubbles. Nonlinear Dyn. 83, 1199–1215 (2016)
Tian, S.F., Zhang, H.Q.: A kind of explicit Riemann theta functions periodic wave solutions for discrete soliton equations. Commun. Nonlinear Sci. Numer. Simul. 16, 173–186 (2010)
Tian, S.F., Zhang, H.Q.: On the integrability of a generalized variable-coefficient forced Korteweg–de Vries equation in fluids. Stud. Appl. Math. 132, 212 (2014)
Tu, J.M., Tian, S.F., Xu, M.J., Zhang, T.T.: Quasi-periodic waves and solitary waves to a generalized KdV–Caudrey–Dodd–Gibbon equation from fluid dynamics. Taiwan. J. Math. 20, 823–848 (2016)
Tian, S.F., Zhang, H.Q.: Riemann theta functions periodic wave solutions and rational characteristics for the \((1+ 1)\)-dimensional and \((2+1)\)-dimensional Ito equation. Chaos Solitons Fractals 47, 27 (2013)
Xu, M.J., Tian, S.F., Tu, J.M., Zhang, T.T.: Bäcklund transformation, infinite conservation laws and periodic wave solutions to a generalized \((2+1)\)-dimensional Boussinesq equation. Nonlinear Anal.: Real World Appl. 31, 388–408 (2016)
Xu, M.J., Tian, S.F., Tu, J.M., Ma, P.L., Zhang, T.T.: On quasiperiodic wave solutions and integrability to a generalized \((2+1)\)-dimensional Korteweg–de Vries equation. Nonlinear Dyn. 82, 2031–2049 (2015)
Tu, J.M., Tian, S.F., Xu, M.J., Ma, P.L., Zhang, T.T.: On periodic wave solutions with asymptotic behaviors to a \((3+1)\)-dimensional generalized B-type Kadomtsev–Petviashvili equation in fluid dynamics. Comput. Math. Appl. 72, 2486–2504 (2016)
Wang, X.B., Tian, S.F., Xu, M.J., Zhang, T.T.: On integrability and quasi-periodic wave solutions to a \((3+1)\)-dimensional generalized KdV-like model equation. Appl. Math. Comput. 283, 216–233 (2016)
Wang, X.B., Tian, S.F., Feng, L.L., Yan, H., Zhang, T.T.: Quasiperiodic waves, solitary waves and asymptotic properties for a generalized \((3+1)\)-dimensional variable-coefficient B-type Kadomtsev–Petviashvili equation. Nonlinear Dyn. 88, 2265–2279 (2017)
Acknowledgements
This work was supported by the Research and Practice of Educational Reform for Graduate students in China University of Mining and Technology under Grant No. YJSJG_2017_049, the No. [2016] 22 supported by Ministry of Industry and Information Technology of China, the “Qinglan Engineering project” of Jiangsu Universities, the National Natural Science Foundation of China under Grant Nos. 11301527 and 51522902, the Fundamental Research Funds for the Central Universities under Grant Nos. 2017XKQY101 and DUT17ZD233, and the General Financial Grant from the China Postdoctoral Science Foundation under Grant Nos. 2015M570498 and 2017T100413.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
All authors declare that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Yan, XW., Tian, SF., Dong, MJ. et al. Bäcklund transformation, rogue wave solutions and interaction phenomena for a \(\varvec{(3+1)}\)-dimensional B-type Kadomtsev–Petviashvili–Boussinesq equation. Nonlinear Dyn 92, 709–720 (2018). https://doi.org/10.1007/s11071-018-4085-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4085-5