
Abstract
In today’s society, the Internet has become an important tool of our life due to its potential applications in various areas such as economics, industry, agriculture, medical and health care, and information processing. To understand and grasp the law of the Internet, many competitive web site models of the Internet and some phenomena related to World Wide Web have been investigated systematically. However, many scholars only study the integer-order competitive web site models of the Internet. Up to now, there are few papers that focus on the dynamics of fractional-order competitive web site models of Internet, which possess memory property. In this paper, we are concerned with the stability and the existence of Hopf bifurcation of a fractional-order competitive web site model of Internet. By choosing the time delay as parameter and applying the Routh–Hurwitz criteria, we will establish a new sufficient condition guaranteeing the stability and the existence of Hopf bifurcation for fractional-order competitive web site model of Internet. The research reveals that fractional order and the delay play a key role in describing the stability and Hopf bifurcation of the considered system. Computer simulations are implemented to support the analytic results. Finally, a simple conclusion is presented. The theoretical findings of this article have a great significance in handling the competition dynamics among different web sites.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Internet refers to the current world’s largest, open and specific Internet connected by many networks, which has developed into the world’s largest computer network covering the whole world. With the rapid development of society, the Internet has been widely applied in various areas such as economics, industry, agriculture, medical and health care, and information processing. We can say that the competition of all aspects of life in the future depends on the Internet to a great extent. Over the past several decades, many competitive web site models of the Internet and some phenomena related to World Wide Web have emerged up. For example, Smith et al. [1] referred to the electronic delivery of web pages. Brynjolfsson and Smith [2] investigated the comparison issue of Internet and conventional retailers, Bakos and Brynjolfsson [3] discussed the bundling and competition on the Internet, Varian [4] analyzed the versioning information goods. In detail, we refer the readers to [5,6,7,8,9, 58,59,60,61,62,63]. The emergence of the Internet brings out great changes in our daily economic life. Thus, the maintenance of web site can provide better information to user to make plans for the future. Therefore, the research on competitive web site models has important theoretical value and practical significance.
Based on the Lotka–Volterra competition systems, the competitive web site model can be described as follows:
where \(u_i\) is the fraction of the market which is a customer of site i, \(a_i\ge 0\) is the growth rate which measures the capacity of site i to grow, \(b_i\in [0,1]\) is the maximum capacity which is related to the saturation value of \(u_i\) (the maximum value \(u_i\) can reach) and \(c_{ij}\ge 0\) is the competition rate between sites i and j. For the sake of simplicity, we assume that \(b_i=1\). If we assume that the market has three competitors, then system (1.1) takes the following form:
Considering that the first web site has self-feedback time delay and for the simplification, Xiao and Cao [10] assumed that \(a_1=a_2=a_3=a, c_{12}=c_{13}=c_{21}=c_{23}=c_{31}=c_{32}=c\) and obtained the following delayed competitive web site model:
where \(\varrho \) is time delay. By regarding the time delay \(\varrho \) as bifurcation parameter, Xiao and Cao [10] considered the stability and the existence of Hopf bifurcation of (1.3). Applying the normal form theorem and center manifold reduction, the direction, the stability and the period of bifurcating periodic solutions are determined.
During the past few decades, fractional calculus, which is a generalization of traditional ordinary differentiation and integration to random order (non-integer) [11,12,13,14,15,16,17,18,19], has attracted much attention by numerous scholars due to its potential applications in various disciplines such as electroanalytical chemistry, viscoelasticity, robotics, bioengineering, and control and medicine issues [20, 51,52,53,54,55,56,57]. Moreover, a good deal of phenomena in objective world can be modeled by fractional-order differential equations since fractional-order differential equations have memory and hereditary properties of various materials and processes. So it is more reasonable to establish the fractional-order differential equations to describe the practical problems.
Hopf bifurcation and its control issue are important dynamical behavior of delayed differential equations (integer-order and fractional-order). During the past several decades, Hopf bifurcation phenomena of integer-order delayed differential equations have been widely investigated. But the research on the Hopf bifurcation of fractional-order differential equations is rare. Based on these considerations, Zhao et al. [21] established the following fractional-order delayed competitive web site model:
where \(p_i\in (0,1] (i=1,2,3)\). By choosing the time delay as bifurcation parameter, Zhao et al. [21] considered the stability and the existence of Hopf bifurcation of (1.4). Meanwhile, they investigated the bifurcation control issue of Hopf bifurcation of (1.4) by applying the nonlinear time delay feedback control method.
Here we would like to mention that in real Internet, customers of different web sites have time lag due to the finite reaction times and propagation speeds of signals. This case occurs in many web sites such as Baidu net and Sina net. Thus, different customers of the same site have self-feedback time delay. So we introduce the following fractional-order delayed competitive web site model:
where \(p_i\in (0,1] (i=1,2,3)\). All other coefficients have the same meaning as those in (1.2). Different from the work of Zhao et al. [21], the characteristic equation of model (1.5) which has three delays is more complex, and the time delay feedback technique is more simple than those in Zhao et al. [21].
The advantage of the new model (1.5) mainly lies in the following two aspects: (i) model (1.5) is more realistic than (1.4) due to the fact that it considers that the three web sites have self-feedback delays; (ii) model (1.5) reveals the memory and hereditary properties of all variables of web sites and it can better reflect the real situation of the operation process of web sites.
The key objective of this article is to consider two problems: (1) the stability and the existence of Hopf bifurcation of system (1.5) and (2) applying the time delay feedback control method to control bifurcation of system (1.5). In addition, we point out that fractional-order delayed competitive web site model can characterize the memory and hereditary properties of web site activities and the research on Hopf bifurcation can help site maintainers handle their business strategies.
In order to establish our results, we make the following assumption:
(P1) The following inequality
holds.
The highlights of this paper include the following aspects:
-
We generalize integer-order delayed competitive web site model to new fractional-order version.
-
A set of sufficient conditions to ensure the stability and the existence of Hopf bifurcation of fractional-order delayed competitive web site model are established. The study shows that the delay and fractional order have an important effect on the stability and the existence of Hopf bifurcation of involved systems.
-
To the best of our knowledge, few authors have dealt with the Hopf bifurcation of fractional-order delayed competitive web site model. The theoretical findings of this article will be an enrichment and development to Hopf bifurcation theory of fractional-order delayed differential equations and complete the previous publications.
-
The method of this article will provide a good reference to investigate some other fractional-order delayed differential models.
The remainder of this article is planned as follows: In Sect. 2, several vital notations and elementary results on fractional calculus are prepared. In Sect. 3, the sufficient criteria to ensure the stability and the existence of Hopf bifurcation of considered system are presented. In Sect. 4, Hopf bifurcation is controlled by applying the linear time delay feedback approach. Two examples with their numerical simulations are given to illustrate the obtained main results in Sect. 5. Finally, a simple conclusion is presented.
Remark 1.1
Since the Caputo fractional-order derivative only requires initial conditions given in terms of inter-order derivatives which represent well-understand nature of physical situations. Then it can better characterize the real-world problems. Thus, we adopt the Caputo fractional-order derivative in this paper.
2 Preliminary results
In this segment, some basic definitions and lemmas of fractional calculus are listed.
Definition 2.1
[22] The fractional integral of order \(\sigma \) for a function \(g(\eta )\) is defined as follows:
where \(\eta \ge \eta _0, \sigma >0, \Gamma (.)\) denotes the Gamma function \(\Gamma (s)=\int _0^\infty \eta ^{s-1}e^{-\eta }d\eta .\)
Definition 2.2
[22] The Caputo fractional-order derivative of order \(\sigma \) for a function \(g(\eta )\in ([\eta _0,\infty ),R)\) is defined as follows:
where \(\eta \ge \eta _0\) and n is a positive integer such that \(n-1\le \sigma <n.\) In particular, when \(0<\sigma <1\),
Lemma 2.1
[23] Consider the following autonomous system \(D^\sigma u=Au, u(0)=u_0\) where \(0<\sigma <1, u\in R^n, A\in R^{n\times n}.\) Let \(\lambda _i(i=1,2,\ldots ,n)\) be the root of the characteristic equation of \(D^\sigma u=Au\). Then system \(D^\sigma u=Au\) is asymptotically stable if and only if \(|\text{ arg }(\lambda _i)| >\frac{\sigma \pi }{2} (i=1,2,\ldots ,n)\). In this case, each component of the states decays toward 0 like \(t^{-\sigma }\). Also, this system is stable if and only if \(|\text{ arg }(\lambda _i)| >\frac{\sigma \pi }{2} (i=1,2,\ldots ,n)\) and those critical eigenvalues that satisfy \(|\text{ arg }(\lambda _i)| =\frac{\sigma \pi }{2} (i=1,2,\ldots ,n)\) have geometric multiplicity one.
Lemma 2.2
[11] For the given fractional-order delayed differential equation with Caputo derivative: \(D^\sigma v(t)=C_1v(t)+C_2v(t-\tau )\), where \(v(t)=\phi (t), t\in [-\tau ,0], \sigma \in (0,1], v\in R^n, C_1,C_2\in R^{n\times n}, \tau \in R^{+(n\times n)}\). Then, the characteristic equation of the system is \(\det |s^\sigma I-C_1-C_2e^{-s\tau }|=0.\) If all the roots of the characteristic equation of the system have negative real roots; then, the zero solution of the system is asymptotically stable.
3 Stability and Hopf bifurcation for fractional-order delayed model (1.5)
In this segment, we will investigate the stability and the existence of Hopf bifurcation for model (1.5). Under the condition (P1), system (1.5) has a unique equilibrium point \(u^*=(u_{1}^*, u_{2}^*, u_{3}^*)\), where
The linearization of system (1.5) near the equilibrium point \(u^*=(u_{1}^*, u_{2}^*, u_{3}^*)\) takes the form:
The characteristic equation of (3.2) is
which leads to
where \(B_0(s),B_1(s),B_2(s),B_3(s)\) can be seen in “Appendix A”. Multiplying \(e^{s\varrho }\) on both sides of (3.4), we get
Let \(s=i\theta =\theta \left( \cos \frac{\pi }{2}+i\sin \frac{\pi }{2}\right) (\theta >0)\) be a root of (3.5). Then
where \(B_{iR}(\theta ), B_{iI}(\theta )(i=1,2,3)\) are the real parts and the imaginary parts of \(B_i(i\theta )\) (see “Appendix B”). In view of \(\sin \theta \varrho =\pm \sqrt{1-\cos ^2\theta \varrho }\), it follows from the first equation of (3.6) that
which leads to
where \(\alpha _i(i=0,1,2,3,4,5)\) can be seen in “Appendix C”.
We suppose that (3.8) has roots; then, we can get the expression of \(\cos \theta \varrho \). Assume that \(\cos \theta \varrho =g_1(\theta )\), where \(g_1(\theta )\) is a continuous function with respect to \(\theta \). By the first equation of (3.6), we can easily get the expression \(\sin \theta \varrho \), say \(\sin \theta \varrho =g_2(\theta )\), where \(g_2(\theta )\) is a continuous function with respect to \(\theta \). Then
In view of \(\cos \theta \varrho =g_1(\theta )\), we have
Suppose that (3.9) has at least one positive real root. Let
In order to establish the main results of this article, we give a necessary assumption as follows:
-
(P2)
\(\beta _0>0, \beta _2\beta _1-\beta _0>0\), where \(\beta _i(i=0,1,2)\) can be seen in “Appendix D”.
-
(P3)
\(G_1H_1+G_2H_2>0,\) where \(G_i, H_i(i=1,2)\) can be seen in “Appendix E”.
Lemma 3.1
If \(\varrho =0\) and (P2) is satisfied, then system (1.5) is asymptotically stable.
Proof
If \(\varrho =0\), then (3.5) takes the form:
It follows from (P2) that all the roots \(\lambda _i\) of (3.12) satisfy \(|\text{ arg }(\lambda _i)|>\frac{p_i\pi }{2} (i=1,2,3)\). By Lemma 2.2, we can conclude that system (1.5) with \(\varrho =0\) is asymptotically stable. This ends the proof of Lemma 3.1. \(\square \)
Lemma 3.2
Let \(s(\varrho )=\mu (\varrho )+i\theta (\varrho )\) be the root of (3.5) at \(\varrho =\varrho _0\) satisfying \( \mu (\varrho _0)=0, \theta (\varrho _0)=\theta _{0}\), then \(Re\left[ \frac{\mathrm{d}s}{\mathrm{d}\varrho }\right] \Big |_{\varrho =\varrho _{0}, \theta =\theta _{0}}>0\).
Proof
Differentiating (3.5) with respect to \(\varrho \) leads to
where
Then
It follows from (P3) that
This ends the proof of Lemma 3.2.
Based on the discussion above and Lemmas 3.1 and 3.2, one has the following result.
Theorem 3.1
Under the conditions (P1–P3). (a) If \(\varrho \in [0,\varrho _0)\), then the equilibrium point \((u_{1}^*,u_{2}^*, u_{3}^*)\) of system (1.5) is globally asymptotically stable; (b) if \(\varrho =\varrho _{0}\), then a Hopf bifurcation of system (1.5) occurs near the equilibrium point \((u_{1}^*,u_{2}^*, u_{3}^*)\).
4 Bifurcation control of fractional-order delayed model (1.5)
Over the past few decades, many time delay feedback methods are applied to control the Hopf bifurcation of integer-order models. However, the time delay feedback controllers are very rare in controlling Hopf bifurcation of fractional-order models. To make up the deficiency, we design a time delay feedback controller [24] which takes the form:
where \(\kappa _1\) is feedback gain coefficient. We add the time delay feedback controller to the first equation of system (1.5), then (1.5) takes the form:
The linearization of system (4.2) near the equilibrium point \(u^*=(u_{1}^*, u_{2}^*, u_{3}^*)\) takes the form:
The characteristic equation of (4.3) is
which leads to
where \(M_i(s)(i=0,1,2,3)\) can be seen in “Appendix F”. Multiplying \(e^{s\varrho }\) on both sides of (4.5), we get
Let \(s=i\theta =\theta \left( \cos \frac{\pi }{2}+i\sin \frac{\pi }{2}\right) \) be a root of (4.6). Then
where \(M_{iR}(\theta ), M_{iI}(\theta )(i=1,2,3)\) are the real parts and the imaginary parts of \(M_i(i\theta )\) (see “Appendix G”). In view of \(\sin \theta \varrho =\pm \sqrt{1-\cos ^2\theta \varrho }\), then it follows from the first equation of (4.7) that
which leads to
where \(\gamma _i(i=0,1,2,3,4)\) can be seen in “Appendix H”. We suppose that (4.9) has roots; then, we can get the expression of \(\cos \theta \varrho \). Assume that \(\cos \theta \varrho =h_1(\theta )\), where \(h_1(\theta )\) is a continuous function with respect to \(\theta \). By the first equation of (4.7), we can get easily the expression \(\sin \theta \varrho \), say \(\sin \theta \varrho =h_2(\theta )\), where \(h_2(\theta )\) is a continuous function with respect to \(\theta \). Then
In view of \(\cos \theta \varrho =h_1(\theta )\), we have
Suppose that (4.10) has at least one positive real root. Let
In order to establish the main results of this article, we give a necessary assumption as follows:
-
(P4)
\(\delta _0>0, \delta _2\delta _1-\delta _0>0\), where \(\delta _i(i=0,1,2)\) can be seen in “Appendix I”.
-
(P5)
\(P_1Q_1+P_2Q_2>0,\) where \(P_i,Q_i(i=1,2)\) can be seen in “Appendix J”.
Lemma 4.1
If \(\varrho =0\) and (P4) is satisfied, then system (4.2) is asymptotically stable.
Proof
If \(\varrho =0\), then (4.5) takes the form:
It follows from (P4) that all the roots \(\lambda _i\) of (4.13) satisfy \(|\text{ arg }(\lambda _i)|>\frac{p_i\pi }{2} (i=1,2,3)\). By Lemma 2.2, we can conclude that system (4.2) with \(\varrho =0\) is asymptotically stable. This ends the proof of Lemma 4.1. \(\square \)
Lemma 4.2
Let \(s(\varrho )=\mu (\varrho )+i\theta (\varrho )\) be the root of (4.6) at \(\varrho =\varrho _{0*}\) satisfying \( \mu (\varrho _{0*})=0, \theta (\varrho _{0*})=\theta _{0*}\); then, \(Re\left[ \frac{\mathrm{d}s}{\mathrm{d}\varrho }\right] \Big |_{\varrho =\varrho _{0*}, \theta =\theta _{0*}}>0\).


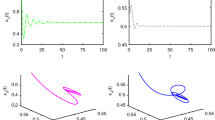
\(\varrho =1.36<\varrho _0= 1.4836.\) The equilibrium point (0.7413, 0.6739, 0.8101) of system (5.1) is asymptotically stable


\(\varrho =1.59>\varrho _0= 1.4836.\) Hopf bifurcation of system (5.1) occurs from the equilibrium point (0.7413, 0.6739, 0.8101)
Proof
Differentiating (4.6) with respect to \(\varrho \) leads to
where
Then
It follows from (P5) that
This ends the proof of Lemma 4.2. \(\square \)
Based on the discussion above and Lemmas 4.1 and 4.2, one has the following result.
Theorem 4.1
Under the conditions (P1),(P4) and (P5). (a) If \(\varrho \in [0,\varrho _{0*})\), then the equilibrium point \((u_{1}^*,u_{2}^*, u_{3}^*)\) of system (4.2) is globally asymptotically stable; (b) if \(\varrho =\varrho _{0*}\), then a Hopf bifurcation of system (4.2) occurs near the equilibrium point \((u_{1}^*,u_{2}^*, u_{3}^*)\).

Relation graph of fractional order \(p_1\) and bifurcation point \(\varrho _0\) of system (5.1)
Remark 4.1
In [25,26,27,28,29,30,31,32,33,34,35,36,37,38,39], the authors investigated the Hopf bifurcation problems of integer-order delayed systems. In this article, we consider the stability and Hopf bifurcation of fractional-order delayed competition model of Internet. All the derived results of [25,26,27,28,29,30,31,32,33,34,35,36,37,38,39] cannot be applied to (1.5) to obtain the stability and the existence of Hopf bifurcation for (1.5). In [10], Xiao and Cao discussed the Hopf bifurcation of delayed competitive web sites model, but they did not analyze the fractional-order case. Thus, we think that the obtained results are completely innovative, and our investigation on the stability and the existence of Hopf bifurcation for (1.5) also complements the earlier publications.
Remark 4.2
Xu and Zhang [40] and Yang et al. [41] dealt with the control of Hopf bifurcation for integer-order delayed systems by applying linear time delay feedback control. They did not discuss the control of Hopf bifurcation for fractional-order systems. Based on this viewpoint, the results of this article supplement the works of Xu and Zhang [40] and Yang et al. [41].
Remark 4.3
Xiao et al. [42] analyzed the control of Hopf bifurcation in fractional-order system by designing the fractional-order PD controller. Huang et al. [43] focused on the bifurcation control of fractional-order system by designing hybrid controller. In this article, we handle the bifurcation control of fractional-order model by designing a linear time delay feedback controller, which is a more simple control strategy than those in [42, 43], and this controller can be easily designed.
Remark 4.4
Zhao et al. [21] designed a feedback controller with square term and cubic term. In this paper, we design a feedback controller without square term and cubic term. The feedback controller of this paper is simpler than that of [21]. In addition, we can also design some non-delayed controllers to control the Hopf bifurcation. We will leave this topic be our future direction.


\(\varrho =2.3<\varrho _{0*}= 2.4551.\) The equilibrium point (0.7413, 0.6739, 0.8101). of system (5.2) is asymptotically stable


\(\varrho =2.82>\varrho _{0*}= 2.4551.\) Hopf bifurcation of system (5.2) occurs from the equilibrium point (0.7413, 0.6739, 0.8101)
5 Examples
Example 5.1
Consider the following fractional-order system:
Obviously, system (5.1) has a unique equilibrium point (0.7413, 0.6739, 0.8101). Let \(p_1=0.85,p_2=0.77, p_3=0.91\). Then the critical frequency \(\theta _0=0.8093\) and the bifurcation point \(\varrho _0= 1.4836\). Then all the conditions (P1–P3) of Theorem 3.1 hold true. Figure 1 reveals that the equilibrium point (0.7413, 0.6739, 0.8101) of system (5.1) is locally asymptotically stable for \(\varrho \in [0, \varrho _0)\). Figure 2 implies that system (5.1) loses its stability and that Hopf bifurcation occurs for \(\varrho \in [\varrho _0,+\infty )\). Next, we investigate the impact of different fractional order on Hopf bifurcation of system (5.1). Let \(p_2=0.77,p_3=0.91\); then, the Hopf bifurcation appears in advance as \(p_1\) increases. Table 1 illustrates the relation of fractional order \(p_1\) on the critical frequency \(\theta _0\) and bifurcation point \(\varrho _0\). Figure 3 shows the relation of fractional order \(p_1\) and bifurcation point \(\varrho _0.\) Let \(p_1=0.85,p_3=0.91\); then, the Hopf bifurcation occurs in advance as \(p_2\) increases. Table 2 illustrates the relation of fractional order \(p_2\) on the critical frequency \(\theta _0\) and bifurcation point \(\varrho _0\). Let \(p_1=0.85,p_2=0.77\); then, the Hopf bifurcation emerges in advance as \(p_3\) increases. Table 3 illustrates the relation of fractional order \(p_3\) on the critical frequency \(\theta _0\) and bifurcation point \(\varrho _0\).
Example 5.2
Consider the following fractional-order controlled system:
Obviously, system (5.2) has a unique equilibrium point (0.7413, 0.6739, 0.8101). Let \(p_1=0.85,p_2=0.77, p_3=0.91\) and \(\kappa _1=0.2\). Then the critical frequency \(\theta _{0*}=1.6023\) and the bifurcation point \(\varrho _{0*}= 2.4551\). Then all the assumptions (P1), (P4) and (P5) of Theorem 4.1 hold true. Figure 4 shows that the equilibrium point (0.7413, 0.6739, 0.8101) of system (5.2) is locally asymptotically stable for \(\varrho \in [0, \varrho _{0*})\). Figure 5 implies that system (5.2) loses its stability and that Hopf bifurcation appears for \(\varrho \in [\varrho _{0*},+\infty )\). Clearly, the order can delay the onset of Hopf bifurcation [compared with uncontrolled system (5.1)].
6 Conclusions
In recent years, the Hopf bifurcation and its control issue have attracted great attention by many scholars (see [44,45,46,47,48,49,50]). In the present paper, we mainly focus on two themes: (1) We proposed a new fractional-order delayed competitive web site model. By choosing the time delay as bifurcation parameter, we establish a set of sufficient conditions to ensure the stability and the existence of Hopf bifurcation of the new fractional-order delayed competitive web site model. The research shows that both time delay and the fractional order have important effects on the bifurcation behavior of the considered model. (2) We deal with the bifurcation control issue of fractional-order delayed competitive web site model by designing a simple time delay feedback controller. Some new sufficient conditions to ensure the stability and the existence of Hopf bifurcation of fractional-order controlled fractional-order delayed competitive web site model are given. The investigation reveals that one can delay the onset of Hopf bifurcation by adjusting the fractional-order, time delay and feedback gain coefficients. The derived results have important theoretical guiding significance in maintaining the stability of web site of Internet. In addition, the analysis method on Hopf bifurcation and Hopf bifurcation control can also be applied to investigate bifurcation or chaotic control problems in many fields such as engineering and physics. Here we mention that three web sites have different self-feedback time delays. Thus, the effect of different delays on the stability and Hopf bifurcation of competitive web site models of the Internet will be our future research direction.
References
Smith, M.D., Bailey, J., Brynjolfsson, E.: Understanding Digital Markets: Review and Assessment. Working Paper (1999)
Brynjolfsson, E., Smith, M.: Frictionless Commerce? A Comparison of Internet and Conventional retailers. Working Paper, MIT (1999)
Bakos, Y., Brynjolfsson, E.: Bundling and Competition on the Internet: Aggregation Strategies for Information Goods. Working Paper (1999)
Varian, H.R.: Versioning Information Goods. Working Paper (1997)
Walraven, A., Gruwel, S.B., Boshuizen, H.P.A.: How students evaluate information and sources when searching the World Wide Web for information. Comput. Educ. 52(1), 234–246 (2009)
Sarna, L., Bialous, S.A.: A review of images of nurses and smoking on the World Wide Web. Nurs. Outlook 60(5), 36–46 (2012)
Li, Y.H., Zhu, S.M.: Competitive dynamics of e-commerce web sites. Appl. Math. Model. 31(5), 912–919 (2007)
Maurer, S.M., Huberman, B.A.: Competitive dynamics of web sites. J. Econ. Dyn. Control 27(11–12), 2195–2206 (2003)
Poddar, A., Donthu, N., Wei, Y.J.: Web site customer orientations, Web site quality, and purchase intentions: the role of Web site personality. J. Bus. Res. 62(4), 441–450 (2009)
Xiao, M., Cao, J.D.: Stablity and Hopf bifurcation in a delayed competitive web sites model. Phys. Lett. A 353, 138–150 (2006)
Deng, W.H., Li, C.P., Lü, J.H.: Stability analysis of linear fractional differential system with multiple time delays. Nonlinear Dyn. 48(4), 409–416 (2007)
Wang, Y., Jiang, J.Q.: Existence and nonexistence of positive solutions for the fractional coupled system involving generalized p-Laplacian. Adv. Diff. Equ. 337, 1–19 (2017)
Wang, Y.Q., Liu, L.S.: Positive solutions for a class of fractional 3-point boundary value problems at resonance. Adv. Differ. Equ. 7, 1–13 (2017)
Li, M.M., Wang, J.R.: Exploring delayed Mittag–Leffler type matrix functions to study finite time stability of fractional delay differential equations. Appl. Math. Comput. 324, 254–265 (2018)
Zuo, M.Y., Hao, X.A., Liu, L.S., Cui, Y.J.: Existence results for impulsive fractional integro-differential equation of mixed type with constant coefficient and antiperiodic boundary conditions. Bound. Value Probl. 161, 15 (2017)
Feng, Q.H., Meng, F.W.: Traveling wave solutions for fractional partial differential equations arising in mathematical physics by an improved fractional Jacobi elliptic equation method. Math. Methods Appl. Sci. 40(10), 3676–3686 (2017)
Wang, Y., Jiang, J.Q.: Existence and nonexistence of positive solutions for the fractional coupled system involving generalized p-Laplacian. Adv. Diff. Equ. 337, 1–19 (2017)
Zhu, B., Liu, L.S., Wu, Y.H.: Existence and uniqueness of global mild solutions for a class of nonlinear fractional reaction-diffusion equations with delay. Comput. Math. Appl. (2016) https://doi.org/10.1016/j.camwa.2016.01.028
Zhang, X.G., Liu, L.S., Wu, Y.H., Wiwatanapataphee, B.: Nontrivial solutions for a fractional advection dispersion equationin anomalous diffusion. Appl. Math. Lett. 66, 1–8 (2017)
Yang, X.J., Song, Q.K., Liu, Y.R., Zhao, Z.J.: Finite-time stability analysis of fractional-order neural networks with delay. Neurocomputing 152, 19–26 (2015)
Zhao, L.Z., Cao, J.D., Huang, C.D., Xiao, M., Alsaedi, A.: Bifurcation control in the delayed fractional competitive web-site model with incommensurate-order. Int. J. Mach. Learn. Cyber. (2017) https://doi.org/10.1007/s13042-017-0707-3
Podlubny, I.: Fractional Differential Equations. Academic Press, New York (1999)
Matignon, D.: Stability results for fractional differential equations with applications to control processing, computational engineering in systems and application multi-conference, IMACS. In: IEEE-SMC Proceedings, Lille, vol. 2, pp. 963-968. France (1996)
Yu, P., Chen, G.R.: Hopf bifurcation control using nonlinear feedback with polynomial functions. Int. J. Bifurc. Chaos 14(5), 1683–1704 (2004)
Xu, C.J.: Local and global Hopf bifurcation analysis on simplified bidirectional associative memory neural networks with multiple delays. Math. Comput. Simul. 149, 69–90 (2018)
Xu, C.J., Zhang, Q.M.: Bifurcation analysis of a tri-neuron neural network model in the frequency domain. Nonlinear Dyn. 76(1), 33–46 (2014)
Xu, C.J., Tang, X.H., Liao, M.X.: Stability and bifurcation analysis of a six-neuron BAM neural network model with discrete delays. Neurocomputing 74(5), 689–707 (2011)
Xu, C.J., Tang, X.H., Liao, M.X.: Frequency domain analysis for bifurcation in a simplified tri-neuron BAM network model with two delays. Neural Netw. 23(7), 872–880 (2010)
Xu, C.J., Tang, X.H., Liao, M.X.: Stability and bifurcation analysis of a delayed predator-prey model of prey dispersal in two-patch environments. Appl. Math. Comput. 216(10), 2920–2936 (2010)
Xu, C.J., Liao, M.X.: Bifurcation analysis of an autonomous epidemic predator-prey model with delay. Annali di Matematica Pura ed Applicata 193(1), 23–28 (2014)
Xu, C.J., Tang, X.H., Liao, M.X.: Stability and bifurcation analysis on a ring of five neurons with discrete delays. J. Dyn. Control Syst. 19(2), 237–275 (2013)
Xu, C.J., Shao, Y.F., Li, P.L.: Bifurcation behavior for an electronic neural network model with two different delays. Neural Process. Lett. 42(3), 541–561 (2015)
Xu, C.J., Wu, Y.S.: Bifurcation and control of chaos in a chemical system. Appl. Math. Model. 39(8), 2295–2310 (2015)
Ge, J.H., Xu, J.: Stability and Hopf bifurcation on four-neuron neural networks with inertia and multiple delays. Neurocomputing 287, 34–44 (2018)
Song, Y.L., Jiang, H.P., Liu, Q.X., Yuan, Y.: Spatiotemporal dynamics of the diffusive mussel-algae model near turing-Hopf bifurcation. SIAM J. Appl. Dyn. Syst 16(4), 2030–2062 (2017)
Yan, X.P., Zhang, C.H.: Turing instability and formation of temporal patterns in a diffusive bimolecular model with saturation law. Nonlinear Anal. Real World Appl. 43, 54–77 (2018)
Lajmiri, Z., Ghaziani, R.K., Orak, I.: Bifurcation and stability analysis of a ratio-dependent predator-prey model with predator harvesting rate. Chaos Solitons Fractals 106, 193–200 (2018)
Pecora, N., Sodini, M.: A heterogenous Cournot duopoly with delay dynamics: Hopf bifurcations and stability switching curves. Commun. Nonlinear Sci. Numer. Simul. 58, 36–46 (2018)
Chen, S.S., Lou, Y., Wei, J.J.: Hopf bifurcation in a delayed reaction diffusion advection population model. J. Diff. Equ. 264(8), 5333–5359 (2018)
Xu, C.J., Zhang, Q.M.: On the chaos control of the Qi system. J. Eng. Math. 90(1), 67–81 (2015)
Yang, R., Peng, Y.H., Song, Y.L.: Stability and Hopf bifurcation in an inverted pendulum with delayed feedback control. Nonlinear Dyn. 73(1–2), 737–749 (2013)
Xiao, M., Zheng, W.X., Lin, J.X., Jiang, G.P., Zhao, L.D.: Fractional-order PD control at Hopf bifurcation in delayed fractional-order small-world networks. J. Frankl. Inst. 354(17), 7643–7667 (2017)
Huang, C.D., Cao, J.D., Xiao, M.: Hybrid control on bifurcation for a delayed fractional gene regulatory network. Chaos Solitons Fractals 87, 19–29 (2016)
Huang, C.D., Cao, J.D., Xiao, M., Alsaedi, A., Alsaadi, F.E.: Controlling bifurcation in a delayed fractional predator-prey system with incommensurate orders. Appl. Math. Comput. 293, 293–31 (2017)
Huang, C.D., Cao, J.D.: Impact of leakage delay on bifurcation in high-order fractional BAM neural networks. Neural Netw. 98, 223–235 (2018)
Huang, C.D., Cao, J.D., Xiao, M., Alsaedi, A., Hayat, T.: Bifurcations in a delayed fractional complex-valued neural network. Appl. Math. Comput. 292, 210–227 (2017)
Abdelouahab, M.S., Hamri, N.E., Wang, J.W.: Hopf bifurcation and chaos in fractional-order modified hybrid optical system. Nonlinear Dyn. 69(1–2), 275–28 (2012)
Rakkiyappan, R., Udhayakumar, K., Velmurugan, G., Cao, J.D., Alsaedi, A.: Stability and Hopf bifurcation analysis of fractional-order complex-valued neural networks with time delays. Appl. Math. Comput. 225, 1–25 (2017)
Xiao, M., Jiang, G.P., Zheng, W.X., Yan, S.L., Wan, Y.H., Fan, C.X.: Bifurcation control od a fractional-order van der pol oscillator based on the state feedback. Asian J. Control 17(5), 1755–1766 (2015)
Huang, C.D., Cao, J.D., Xiao, M., Alsaedi, A., Hayat, T.: Effects of time delays on stability and Hopf bifurcation in a fractional ring-structured network with arbitrary neurons. Commun. Nonlinear Sci. Numer. Simul. 57, 1–13 (2018)
Huang, C.D., Li, Z.H., Ding, D.W., Cao, J.D.: Bifurcation analysis in a delayed fractional neural network involving self-connection. Neurocomputing 314, 186–197 (2018)
Huang, C.D., Cai, L.M., Cao, J.D.: Linear control for synchronization of a fractional-order time-delayed chaotic financial system. Chaos Solitons Fractals 113, 326–332 (2018)
Xiao, M., Zheng, W.X., Jiang, G.P., Cao, J.D.: Stability and bifurcation analysis of arbitrarily high-dimensional genetic regulatory networks with hub structure and bidirectional compling. IEEE Trans. Circ. Sys. I 63(8), 1243–1254 (2016)
Rajagopal, K., Karthikeyan, A., Duraisamy, P., Weldegiorgis, R., Tadesse, G.: Bifurcation, Chaos and its control in a fractional order power system model with uncertaities. Asian J. Control 21(1), 1–10 (2018)
Rajagopal, K., Karthikeyan, A., Srinivasan, A.: Bifurcation and chaos in time delayed fractional order chaotic memfractor oscillator and its sliding mode synchronization with uncertainties. Chaos Solitons Fractals 103, 347–356 (2017)
Huo, J.J., Zhao, H.Y., Zhu, L.H.: The effect of vaccines on backward bifurcation in a fractional order HIV model. Nonlinear Anal. Real World Appl. 26, 289–305 (2015)
Zhang, J., Lou, Z.L., Jia, Y.J., Shao, W.: Ground state of Kirchhoff type fractional Schrödinger equations with critical growth. J. Math. Anal. Appl. 462(1), 57–83 (2018)
Dias, F.S., Mello, L.F., Zhang, J.G.: Nonlinear analysis in a Lorenz-Like system. Nonlinear Anal. Real World Appl. 11(5), 3491–3500 (2010)
Aqeel, M., Azam, A., Ahmad, S.: Control of chaos: Lie algebraic exact linearization approach for the Lu system. Eur. Phys. J. Plus 132(10), 426 (2017)
Dias, F.S., Mello, L.F.: Hopf bifurcations and small amplitude limit cycles in Rucklidge systems. Electron. J. Differ. Equ. 2013(48), 886–888 (2013)
Aqeel, M., Ahmad, S.: Analytical and numerical study of Hopf bifurcation scenario for a three-dimensional chaotic system. Nonlinear Dyn. 84(2), 755–765 (2016)
Messias, M., Braga, D.D.C., Mello, L.F.: Degenerate Hopf bifurcations in Chua’s system. Int. J. Bifurc. Chaos 19(2), 497–515 (2009)
Azam, A., Aqeel, M., Ahmad, S., Ahmed, F.: Chaotic behavior of modified stretch-twist-fold (STF) flow with fractal property. Nonlinear Dyn. 90(1), 1–12 (2017)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work is supported by National Natural Science Foundation of China (No. 61673008) and Project of High-level Innovative Talents of Guizhou Province ([2016]5651) and Major Research Project of The Innovation Group of The Education Department of Guizhou Province ([2017]039), Project of Key Laboratory of Guizhou Province with Financial and Physical Features ([2017]004) and Foundation of Science and Technology of Guizhou Province ([2018]1025 and [2018]1020).
Appendices
Appendix A
Appendix B
Appendix C
Appendix D
Appendix E
Appendix F
Appendix G
Appendix H
Appendix I
Appendix J
Rights and permissions
About this article

Cite this article
Xu, C., Liao, M. & Li, P. Bifurcation control for a fractional-order competition model of Internet with delays. Nonlinear Dyn 95, 3335–3356 (2019). https://doi.org/10.1007/s11071-018-04758-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-04758-w