
Abstract
This paper is devoted to the problem of controlling chaos in the Qi system. A time-delayed feedback control method is applied to suppress chaos to unstable equilibria or unstable periodic orbits. Using a local stability analysis, we theoretically prove that the Hopf bifurcation occurs. Some numerical simulations are carried out to support the theoretical predictions. Finally, main conclusions are drawn.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Chaotic systems play a critical role in numerous fields such as, for example, information processing, secure communications, and high-performance circuit design for telecommunications [1]. Chaos is a very attractive subject from a theoretical point of view; however, it is quite challenging technically [2]. Over the last decade, many techniques have been proposed to control chaos, and many excellent results have been reported [3–27]. In 2005, Qi et al. [28] investigated the complex dynamical behaviors (e.g., familiar period-doubling route to chaos, Hopf bifurcation) of the following Qi system:
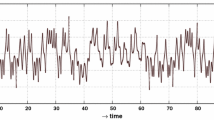
where \(x_1,x_2,x_3\), and \(x_4\) are the state variables of the system and \(a,b,c\), and \(d\) are all positive real constants. Interestingly, system (2) can generate chaotic phenomena (Fig. 1) given the system parameters \(a=30,b=10,c=1\), and \(d=10\).

Chaotic attractor of system (2) with \(a=30,b=10,c=1\), and \(d=10\)
Since chaos can cause irregular behaviors that are sometimes undesirable in practical systems, in many cases, it is preferable to avoid or eliminate them. Control mechanisms that enable a chaotic system to achieve and maintain a desired dynamical behavior have potential applications in various disciplines [29]. In 2009, Niah and Sunday [29] investigated the chaos control of system (2) by applying a recursive backstepping nonlinear controller. The aim of this paper is to investigate the dynamics of a four-dimensional (4D) chaotic Qi system by considering the effect of delayed feedback. Analyzing the characteristic equation of a linearized system of the Qi model, we theoretically prove that under some suitable conditions, a Hopf bifurcation will occur. Numerical results support theoretical predictions.
2 Controlling chaos via feedback control methods
In this section, we shall apply a conventional feedback method to the dynamical system (2). Our aim is to drag the chaotic trajectories to the equilibria or the periodic orbits. To reflect the dynamical behaviors of the model depending on past information, it is reasonable to incorporate a time delay into this system. The signal error of the current and past states of the continuous time system will be given as feedback to the system itself. Following the idea of Pyragas [30], we consider two cases.
Case I Add the time-delayed force \(k_1[x_2-x_2(t-\tau _1)]\) to the second equation of system (2). In this case, system (2) takes the form
Case II Add the time-delayed forces \(k_2[x_2(t)-x_2(t-\tau _2)]\) and \(k_3[x_3(t)-x_3(t-\tau _2)]\) to the second and third equations of system (2), respectively. In this case, system (2) becomes
Let \(E(x_1^*,x_2^*,x_3^*,x_4^*)\) be the equilibrium of systems (2) and (3).
Case 1 Delayed feedback on the first equation [system (2)]:
The linearized system of Eq. (2) around \(E(x_1^*,x_2^*,x_3^*,x_4^*)\) is given by
The characteristic equation of (4) takes the form
that is,
where
Next, we will discuss the distribution of the roots of the transcendental equation (6).
Lemma 1
[31] For the transcendental equation
as \((\tau _1,\tau _2,\tau _3,\ldots ,\tau _m)\) vary, the sum of orders of the zeros of \(P(\lambda , \mathrm{e}^{-\lambda \tau _1},\ldots ,\mathrm{e}^{-\lambda \tau _m})\) in the open right half-plane can change, and only a zero appears on or crosses the imaginary axis.
When \(\tau _1=0,\) equation (6) becomes
We can easily know that all the roots of (7) have a negative real part if the following conditions hold:
Then the equilibrium point \(E(x_1^*,x_2^*,x_3^*,x_4^*)\) is locally asymptotically stable when (8)–(11) hold.
We assume that
For \(\omega >0,\mathrm{i}\omega \) is a root of (6) if and only if
Separating the real and imaginary parts gives
It follows from (12) that
which is equivalent to
where
Use the notation \(z=\omega ^2\); then (13) takes the following form:
Let
Suppose
If all the coefficients of system (2) are given, then we can easily calculate the roots of (14). Since \(\lim _{z\rightarrow {\infty }}h(z)=\infty \), we can conclude that if \(p_0<0\), then (14) has at least one positive real root. Without loss of generality, we assume that (14) has four positive real roots, defined by \(z_1,z_2,z_3,z_4\). Then (13) has four positive roots:
By (12), we derive
Thus, if we use the notation
where \(k=1,2,3,4; j=0,1,2,\ldots \), then \(\pm {\mathrm{i}\omega _k}\) are a pair of imaginary roots of Eq. (6) when \(\tau _1=\tau _{1k}^{(j)}\). Define
Let \(\lambda (\tau _1)=\alpha (\tau _1)+\mathrm{i}\omega (\tau _1)\) be a root of (6) around \(\tau _1=\tau _{1k}^{(j)}\), where \(\alpha (\tau _1)\) and \(\omega (\tau _1)\) satisfy \(\alpha (\tau _{1k}^{(j)})=0\) and \( \omega (\tau _{1k}^{(j)})=\omega _k.\) Differentiating both sides of (6) with respect to \(\tau _1\) yields
Letting \(\lambda =\mathrm{i}\omega _k, \tau _1=\tau _{1k}^{(j)}\), we have
where
Suppose that the following condition holds:
According to the preceding analysis and the results of Kuang [32] and Hale [33], we have the following theorem.
Theorem 2
If (H1) and (H2) hold, then the equilibrium \(E(x_1^*,x_2^*,x_3^*,x_4^*)\) of system (2) is asymptotically stable when \(\tau _1\in [0,\tau _{1_0})\). In addition to (H1) and (H2), if (H3) holds, then system (2) undergoes a Hopf bifurcation at the equilibrium \(E(x_1^*,x_2^*,x_3^*,x_4^*)\) when \(\tau _1=\tau _{1k}^{(j)}, k=1,2,3,4, j=0,1,2,\ldots \).
Remark 3
It is shown that if (H1) and (H2) are fulfilled, then the states \(x_i(i=1,2,3,4)\) of system (2) will tend to \(x_i^*\) when \(\tau _1\in [0,\tau _{1_0})\). If (H1), (H2), and (H3) hold, then the states \(x_i(i=1,2,3,4)\) of system (2) may coexist and remain in an oscillatory mode near the equilibrium \(E(x_1^*,x_2^*,x_3^*,x_4^*)\). Thus, chaos vanishes, which means that chaos can be controlled.
Case 2 Delayed feedback on second and third equations [system (3)]
The linearized system of Eq. (3) around \(E(x_1^*,x_2^*,x_3^*,x_4^*)\) is given by
The characteristic equation of (19) takes the form
that is,
where
Multiplying \(\text {e}^{\lambda \tau _2}\) on both sides of (20), we have
Next, we will focus on the distribution of the roots of the transcendental equation (21).
When \(\tau _2=0,\) (21) reads as
All the roots of (22) have a negative real part if the following conditions hold:
Then the equilibrium point \(E(x_1^*,x_2^*,x_3^*,x_4^*)\) is locally asymptotically stable when (23)–(26) hold.
We assume that
For \(\tilde{\omega }>0,\mathrm{i}\tilde{\omega }\) is a root of (21) if and only if
Separating the real and imaginary parts gives
It follows from (27) that
which leads to
where
Let
We assume that
If all the coefficients of system (3) are given, it is not difficult to calculate the roots of (28). Since \(\lim _{\tilde{\omega }\rightarrow {\infty }}\tilde{h}(\tilde{\omega })=\infty ,\) we can conclude that if \(\delta _1<0\), then (28) has at least one positive real root.
Suppose that Eq. (28) has positive roots. Without loss of generality, we assume that it has 12 positive roots, denoted by \(\tilde{\omega }_k(k=1,2,3\ldots ,12).\) If we use the notation
where \(k=1,2,\ldots ,12, j=0,1,2,\ldots \), then \(\pm {\mathrm{i}\tilde{\omega }_k}\) are a pair of imaginary roots of Eq. (21) when \(\tau _2=\tau _{2k}^{(j)}\). Define
Let \(\lambda (\tau _2)=\tilde{\alpha }(\tau _2)+\mathrm{i}\tilde{\omega }(\tau _2)\) be a root of (21) around \(\tau _2=\tau _{2k}^{(j)}\), and let \(\tilde{\alpha }(\tau _{2k}^{(j)})=0\) and \( \tilde{\omega }(\tau _{2k}^{(j)})=\tilde{\omega }_k.\) Differentiating both sides of (21) with respect to \(\tau _2\) yields
Letting \(\lambda =\mathrm{i}\tilde{\omega }_k, \tau _2=\tau _{2k}^{(j)}\), we obtain
where
Assume that the following condition holds:
Based on the foregoing analysis and the results of Kuang [32] and Hale [33], we obtain the following theorem.
Theorem 4
If (H4) and (H5) hold, then the equilibrium \(E(x_1^*,x_2^*,x_3^*,x_4^*)\) of system (3) is asymptotically stable when \(\tau _2\in [0,\tau _{2_0})\). In addition to (H4) and (H5), if (H6) holds, then system (3) undergoes a Hopf bifurcation at the equilibrium \(E(x_1^*,x_2^*,x_3^*,x_4^*)\) when \(\tau _2=\tau _{2k}^{(j)}, k=1,2,\ldots ,12, j=0,1,2,\ldots \).
Remark 5
It is shown that if (H4) and (H5) are satisfied, then the states \(x_i(i=1,2,3,4)\) of system (2) will tend to \(x_i^*\) when \(\tau _2\in [0,\tau _{2_0})\). If (H4), (H5), and (H6) hold, then the states \(x_i(i=1,2,3,4)\) of system (2) may coexist and remain in an oscillatory mode near the equilibrium \(E(x_1^*,x_2^*,x_3^*,x_4^*)\). Thus, chaos vanishes, which means that chaos can be controlled.
3 Computer simulations
In this section, we present some numerical results of systems (2) and (3) to verify the analytical predictions obtained in the previous section. Let us consider the following two systems:
and
respectively. We can easily obtain that systems (33) and (33) have an equilibrium \(E(-2.2129,-1.4290,7.2141,\) \(2.2813)\).
For system (32), we can easily check that (H1)–(H3) are satisfied. We let \(j=0\), and, using MATLAB 7.0 software, we derive \(\omega _{0}\approx 0.7004, \tau _{1_0}\approx 0.162\). Thus, the equilibrium \(E(-2.2129,-1.4290,7.2141,2.2813)\) is asymptotically stable when \(\tau _1<\tau _{1_0}\approx 0.162\), which is illustrated in Fig. 2. When \(\tau _1=\tau _{1_0}\approx 0.162\), Eq. (32) undergoes a Hopf bifurcation at the equilibrium \(E(-2.2129,-1.4290,7.2141,2.2813)\), i.e., a small-amplitude periodic solution occurs near \(E(-2.2129,-1.4290,7.2141,2.2813)\) when \(\tau _1\) is close to \(\tau _{1_0}\approx 0.162\), which can be shown in Fig. 3.

Chaos vanishes when \(\tau _1= 0.1<\tau _{1_0}\approx 0.162\). The equilibrium \(E(-2.2129, -1.4290, 7.2141, 2.2813)\) is asymptotically stable; the initial value is (\(-\)0.5, \(-\)1, 6.5, 1)

Chaos vanishes when \(\tau _1 = 0.2>\tau _{1_0}\approx 0.162\). The Hopf bifurcation occurs from the equilibrium \(E(-2.2129, -1.4290, 7.2141, 2.2813)\); the initial value is (\(-0.5, -1, 6.5, 1\))
For system (33), we can check that (H4)–(H6) are satisfied. Then \(\tilde{\omega }_0\approx 0.6809, \tau _{2_0}\approx 0.164\). Thus, the equilibrium \(E(-2.2129,-1.4290,7.2141,2.2813)\) is asymptotically stable when \(\tau _2<\tau _{2_0}\approx 0.164\), which is illustrated in Fig. 4. When \(\tau _2=\tau _{2_0}\approx 0.164\), Eq. (33) undergoes a Hopf bifurcation around the equilibrium \(E(-2.2129,-1.4290,7.2141,2.2813)\) when \(\tau _2\) is close to \(\tau _{2_0}\approx 0.164\), which is shown in Fig. 5.

Chaos vanishes when \(\tau _2= 0.1<\tau _{2_0}\approx 0.164\). The equilibrium \(E(-2.2129, -1.4290, 7.2141, 2.2813)\) is asymptotically stable; the initial value is (\(-\)0.5, \(-\)1, 6.5, 1)

The chaos vanishes when \(\tau _2 =0.2>\tau _{2_0}\approx 0.164.\) The Hopf bifurcation occurs from the equilibrium \(E(-2.2129, -1.4290, 7.2141, 2.2813)\). The initial value is (\(-\)0.5, \(-\)1, 6.5, 1)
Remark 6
Since the original system (2) is chaotic, there is no stabilized orbit. When we add feedback perturbations to the original system (2), then under some suitable conditions, stabilized orbits will occur. Thus, we can conclude that the stabilized orbits of the original system (2) are delay-induced.
4 Conclusions
In this paper, a feedback control method was applied to suppress the chaotic behavior of a 4D chaotic Qi system. By adding a time-delayed force to the second equation of the 4D chaotic Qi system, we focused on the local stability of the equilibrium \(E(x_1^*,x_2^*,x_3^*,x_4^*)\) and local Hopf bifurcation of the 4D delayed chaotic Qi system. It was shown that if (H1) is satisfied, then the 4D delayed chaotic Qi system is asymptotically stable when \(\tau _1\in [0, \tau _{1_0})\). If (H1)–(H3) hold, a sequence of Hopf bifurcations occur around the equilibrium \(E(x_1^*,x_2^*,x_3^*,x_4^*)\), that is, a family of periodic orbits bifurcate from the equilibrium \(E(x^*,y^*,z^*)\). Adding a time-delayed force to the second and third equations of the 4D chaotic Qi system, we analyzed the local stability of the equilibrium \(E(x_1^*,x_2^*,x_3^*,x_4^*)\) and local Hopf bifurcation of the 4D delayed chaotic Qi system. We found that if (H4) is satisfied, then the 4D delayed chaotic Qi system is asymptotically stable when \(\tau _2\in [0, \tau _{2_0})\). If (H4)–(H6) hold, a sequence of Hopf bifurcations occurs around the equilibrium \(E(x_1^*,x_2^*,x_3^*,x_4^*)\). All the cases showed that chaos vanishes and can be suppressed. Some numerical simulations were carried out to visualize the theoretical findings.
References
Chen GR (1999) Controlling chaos and bifurcations in engineering systems. CRC Press, Boca Raton
Zhang XD, Shi F, Wang Z (2007) Construction and verification of a simple smooth chaotic system. Commun Theor Phys 48(2):267–274
Moon FC (1992) Chaotic and fractal dynamics. Wiley, New York
Chen GR, Dong X (1998) From chaos to order: methodologies, perspectives and applications. World Scientific, Singapore
Kapitaniak T (1998) Chaos for engineers: theory, applications and control. Springer, Berlin
EI Naschie MS (1996) Introduction to chaos, information and diffusion in quantum physics. Chaos, Solitons Fractals 7(5):7–10
Kapitaniak T (1992) Controlling chaotic oscillations without feedback. Chaos, Solitons Fractals 2(5):519–530
Gakkhar S, Singh A (2012) Control of chaos due to additional predator in the Hastings–Powell food chain model. J Math Anal Appl 385(1):423–438
Sadeghpour M, Khodabakhsh M, Salarieh H (2012) Intelligent control of chaos using linear feedback controller and neural network identifier. Commun Nonlinear Sci Numer Simul 17(12):4731–4739
Bashkirtseva I, Chen GR, Ryashko L (2012) Stochastic equilibria control and chaos suppression for 3D systems via stochastic sensitivity synthesis. Commun Nonlinear Sci Numer Simul 17(8):3381–3389
Ott E, Grebogi C, Yorke JA (1990) Controlling chaos. Phys Rev Lett 64(11):1196–1199
Yassen MT (2003) Chaos control of Chen chaotic dynamical system. Chaos, Solitons Fractals 15(2):271–283
Wan M (2011) Convergence and chaos analysis of a blind decorrelation neural network. J Inf Comput Sci 8(5):791–798
Deng YW, Sun GX, E JQ (2010) Application of chaos optimization algorithm for robust controller design and simulation study. J Inf Comput Sci 7(13):2897–2905
Yang XS, Chen GR (2002) Some observer-based criteria for discrete-time generalized chaos synchronization. Chaos, Solitons Fractals 13(6):1303–1308
Chen GR, Dong X (1993) On feedback control of chaotic continuous time systems. IEEE Trans Circuits Syst 40(9):591–601
Yassen MT (2003) Chaos control of Chen chaotic dynamical system. Chaos, Solitons Fractals 15(2):271–283
Agiza HN (2002) Controlling chaos for the dynamical system of coupled dynamos. Chaos, Solitons Fractals 13(2):341–352
Bai EW, Lonngren KE (2000) Sequential synchronization of two Lorenz systems using active control. Chaos, Solitons Fractals 11(7):1041–1044
Yassen MT (2001) Adaptive control and synchronization of a modified Chua’s circuit system. Appl Math Comput 135(1):113–128
Liao TL, Lin SH (1999) Adaptive control and synchronization of Lorenz system. J Franklin Inst 336(6):925–937
Sanchez EN, Martinez JP, Chen GR (2002) Chaos stabilization: an inverse optimal control approach. Lat Am Appl Res 32(1):111–114
Song YL, Wei JJ (2004) Bifurcation analysis for Chen’s system with delayed feedback and its application to control of chaos. Chaos, Solitons Fractals 22(1):75–91
Wang X, Chen GR (2012) A chaotic system with only one stable equilibrium. Commun Nonlinear Sci Numer Simul 17(3):1264–1272
Sprott JC (1997) Simplest dissipative chaotic flow. Phys Lett A 228(3–4):271–274
Wang X, Chen GR (2013) Constructing a chaotic system with any number of equilibrium. Nonlinear Dyn 71(3):429–436
Song YL, Han MA, Wei JJ (2005) Stability and Hopf bifurcation analysis on a simplified BAM neural network with delays. Physica D 200:185–204
Qi GY, Du SZ, Chen GR, Chen ZQ, Yuan ZZ (2005) On a four-dimensional chaotic system. Chaos, Solitons Fractals 23(5):1671–1682
Njah AN, Sunday OD (2009) Generalization on the chaos control of 4-D chaotic systems using recursive backstepping nonlinear controller. Chaos, Solitons Fractals 41(5):2371–2376
Pyragas K (1992) Continuous control of chaos by self-controlling feedback. Phys Lett A 170(6):421–428
Ruan SG, Wei JJ (2001) On the zeros of a third degree exponential polynomial with applications to a delayed model for the control of testosterone secretion. IMA J Math Appl Med Biol 18(1):41–52
Kuang Y (1993) Delay differential equations with applications in population dynamics. Academic Press INC, Boston
Hale J, Lunel S (1993) Introduction to functional differential equations. Spring, New York
Acknowledgments
This work is supported by the National Natural Science Foundation of China (11261010 and 11201138), Soft Science and Technology Program of Guizhou Province (2011LKC2030), Scientific Research Fund of Hunan Provincial Education Department (12B034), Natural Science and Technology Foundation of Guizhou Province (J[2012]2100), Governor Foundation of Guizhou Province ([2012]53), and Doctoral Foundation of Guizhou University of Finance and Economics (2010).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Xu, C., Zhang, Q. On the chaos control of the Qi system. J Eng Math 90, 67–81 (2015). https://doi.org/10.1007/s10665-014-9730-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10665-014-9730-5