
Abstract
In this study, boundary control is considered for an Euler–Bernoulli beam subject to bounded input, bounded output, and external disturbances. Through utilizing the backstepping technology, a boundary control scheme is designed based on the original partial differential equations to regulate the vibration of the beam. An auxiliary system based on a smooth hyperbolic function is designed to handle the impact of the restricted input. And a barrier Lyapunov function is adopted to eliminate the impact of output restriction. It is proved that the input and output restrictions are circumvented simultaneously. Simulations are demonstrated for illustration.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The Euler–Bernoulli beam (EB) [1, 2] is actually a infinite dimensional system. It can be applied to delineate a lot of flexible mechanical systems such as robotic manipulators [3, 4]; moving strips [5]; flexible marine risers [6]; and flexible wings [7]. For the past few years, the dynamics and the control method design for flexible systems built on the PDEs have been extensively studied [8,9,10,11,12,13]. The asymptotic stability analysis of a coupled PDEs and ODEs is presented in [12]. A boundary control scheme is designed for a two-dimensional variable-length crane system under the external disturbances and constraints to reduce the coupled vibrations in [14]. An active control scheme is proposed in [15] to suppress a flexible string, in which a novel ‘disturbance-like’ term is designed to deal with the input backlash. It can be proved that the proposed control can prevent the constraint violation. In [1], a boundary controller is proposed for an EB beam with external disturbance when the dynamics are represented by PDEs. An integral BLF is used in [16] to design cooperative control laws for a gantry crane system that are descried by a hybrid PDE-ODE system, and the tension is restricted. Although great strides in the control for flexible mechanical systems has been made, studies about how to resolve the problem of the input and output restrictions for PDEs are rare. In practice, input and output restrictions are ubiquitous in physical system when hardware constraints, performance, and safety specifications are considered. To deal with this problem, we will propose a boundary control scheme for an EB beam under input and output restrictions.
As we know, input restrictions, which is in the shape of dead-zone, input restriction, and hysteresis, are usually considered in some physics systems and studied by many researchers [17,18,19,20,21,22,23,24]. And input restriction is a main form. Previous studies have involved in control design in the presences of input saturation [25, 26], where nested saturated input functions are used to limit inputs. For linear system, some researchers use linear matrix inequalities (LMI) to design anti-windup controllers [27, 28]. To analyze and design control law with input constraints for a parabolic PDEs systems, a general framework based on Galerkin’s method and Lyapunov techniques is developed in [29]. To deal with the problem of trajectory tracking subject to restricted input, a novel control law based on smooth hyperbolic function is designed in [30]. However, the output constraint is not taken into account in the above literature when the input saturation is considered. In safety-critical mechanical systems, exceeding the restrictions will cause serious harm. For purpose of dealing with the problems of the bounded output, the BLF is an effective method [31,32,33,34]. Moreover, in [35], adaptive boundary control strategy is presented through using an auxiliary system and a BLF to resolve the problem of input and output constraints for a flexible string. In that paper, a sign function is used to restrict the input signal, which may cause more chattering. And when the states of the auxiliary system is small, there is no proving the stability of the system. Some research works have been carried out to study the problems of both input and output constraints; however, the settlement of this problem is still limited. Therefore, eliminating the impacts of input and output constraints simultaneously for DPS is still a challenge.
In this work, we investigate the vibration suppression problem for a flexible beam subject to input restriction, output constraint, boundary disturbances, and distributed disturbance. The flexible beam is described by PDEs. Based on the backstepping method, a BLF is utilized to prevent the output constraint violation, and a smooth hyperbolic function and an auxiliary system with a Nussbaum function are designed to make up for the nonlinear term caused by the input restriction. Then the system stability is testified on the basis of the Lyapunov’s direct method. And we can conclude that the deflection eventually converges to an arbitrarily small neighborhood around the origin with the proposed control scheme. The main contributions in the present paper are summarized.
(i) Boundary control with a smooth hyperbolic function and an auxiliary system is designed to stabilize an EB beam based on the original PDEs under the condition of input restriction, output constraint, and external disturbances;
(ii) Utilizing a barrier Lyapunov function, the system is shown to be uniform bounded and the constraint violation is prevented.
(iii) The system stability analysis which is on the basis of Lyapunov approach need not simplify or discretize the PDEs.
Notations For clarity, we introduce the following notations as: \((*{)}_{x}=\frac{\partial (*)}{\partial x}\), \((*{)}_{xx}=\frac{{{\partial }^{2}}(*)}{\partial {{x}^{2}}}\), \((*{)}_{xxx}=\frac{{{\partial }^{3}}(*)}{\partial {{x}^{3}}}\), \((*{)}_{xxxx}=\frac{{{\partial }^{4}}(*)}{\partial {{x}^{4}}}\), \((*{)}_{t}=\frac{\partial (*)}{\partial t}\), \((*{)}_{tt}=\frac{{{\partial }^{2} }(*)}{\partial {{t}^{2}}}\).
2 Problem formulation and preliminaries
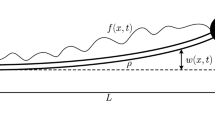
A typical beam-based structure is shown in Fig. 1. The left boundary of the flexible beam is assumed to be fixed at origin. The control input u(t) is imposed on the tip payload. And the flexible beam system is regarded as the EB beam structure with flexible and damping properties.

A typical flexible beam
We first give the kinetic energy \({{E}_{k}}(t)\) of the flexible beam as
where m is mass of the tip payload, w(x, t) is displacement of the flexible beam at time t and position x, L and \(\rho \) are, respectively, length and mass per unit length of the beam.
Then we obtain the potential energy of the beam as
where EI and T are bending stiffness and tension of the beam.
The virtual work of the beam is given by
where the first term is the virtual work about damping on the beam, the second and third terms are the virtual work about the distributed disturbances f(x, t) and boundary disturbance d(t), and the last term is the virtual work about control input u(t). And \(\gamma _{b}\) is damping coefficient of the flexible beam. Using the Hamilton’s principle
where \( t_1\) and \(t_2\) are two time instants, \(t_{1}<t<t_{2}\) is the integral interval, and \(\delta \left( \cdot \right) \) denotes the variation of \((\cdot )\), by the calculation, we obtain the following governing equation
and boundary conditions as
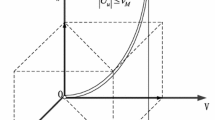
In this paper, the model of the input restriction for the beam is delineated as
where \({{u}_{M}}\) is a known bound of u(t) and \({{u}_{0}}(t)\) is the designed control command.
For the convenience of control design, we present the following assumptions for the subsequent development.
Assumption 1
The disturbances f(x, t) and d(t) are bounded so that there exist two positive constants \(\bar{f}\) and \(\bar{d}\) satisfying \(\left| f(x,t)\right| \le \bar{f}\) and \(\left| d(t)\right| \le \bar{d}\) .
Assumption 2
The control design is on the basis of the assumption that w(L, t), \(w_{t}(L,t)\), \({w}_{x}(L,t)\), \({w}_{xx}(L,t)\), \({w}_{xxx}(L,t)\), \(w_{tx}(L,t)\), \(w_{txxx}(L,t)\), \(w_{ttx}(L,t)\) and \(w_{ttxxx}(L,t)\) are measurable.
Remark 1
In practice, all the signals in the control design can be measured by sensors or obtained by a backward difference algorithm. w(L, t) can be sensed by a laser displacement. \({w}^{\prime }\left( L,t\right) \) can be obtained by an inclinometer, and \({w}^{\prime \prime \prime }\left( L,t\right) \) can be measured by a shear force sensors. Time and spatial variations of these sensor measurements can be calculated with a backward difference algorithm. Such measurements and higher-order variations can introduce noise, which will affect the control implementation.
Assumption 3
The kinetic energy of the EB beam described by (1) is assumed to be bounded \(\forall t\in \left[ 0, \infty \right) \), and \(\frac{{{\partial }^{q+1}}w(x,t)}{\partial {t}\partial {{x}^{q}}}\) is assumed to be bounded for \(t>0\), \(\forall x\in \left[ 0,L \right) \), \(q=0,1,2,3\).
Assumption 4
The potential energy of the EB beam described by (2) is assumed to be bounded \(\forall t\in \left[ 0, \infty \right) \), and \(\frac{{{\partial }^{p}}w(x,t)}{\partial {{x}^{p}}}\) is assumed to be bounded for \(t>0\), \(\forall x\in \left[ 0,L \right) \), \(p=2,3,4\).
3 Control design and analysis
The control targets of designing controller in this study are: (1) to restrain displacement w(x, t) of the beam subject to input and output restrictions, and external disturbances; (2) to satisfy the bounded output condition \(\left| w(L,t)\right| <b\), where b is the constraint.
In this part, the backstepping method [36] will be utilized to design u(t) and the Lyapunov approach will be applied to prove the system’s stability.
As the usual backstepping approach, the following transform of coordinate is made:
where \({\tau }_{1}\) and \({\tau }_{2}\) are the virtual control.
Step 1 A Lyapunov function is chosen as
The derivative of \({{{V}}_{b1}}\) is
We choose the virtual control law \({\tau }_{1}\) as
where \(M_{L}=T{w}_{x}(L,t)-EI{w}_{xxx}(L,t) \) and \({c}_{1}>0\).
Substituting Eq. (13) in Eq. (12), we have
Step 2 Then a Lyapunov function candidate is chosen as
Combing with Eq. (11), the derivative of Eq. (15) is
Similarly, we choose the control law \({{\tau }_{2}}\) as
where \({c}_{2}>0\).
Substituting Eq. (17) in Eq. (16) yields
Using the inequality \({{z}_{2}}d(t)\le lz_{2}^{2}+\frac{1}{4l}{{d}^{2}}(t)\), Eq. (18) then is written as
We design an auxiliary system as
where \(c>0\).
Considering Eqs. (11), (17) and (20), we obtain
Then we use a Nussbaum function \(N\left( \chi \right) \) to design the control law \(\omega \) in (20), and \(\omega \) is designed as
where \({c}_{3}>0\), \(l>0\) and \(N\left( \chi \right) \) is a Nussbaum function defined as
where \({{\gamma }_{\chi }}\) is a positive real design parameter. And the Nussbaum function satisfies the two properties [37]
Step 3 A Lyapunov function candidate is chosen as
The derivative of \({{V}_{b}}\) is
Substituting Eqs. (21) and (23) in Eq. (26), and using Eq. (22), we have
Considering the inequality
noting that \(\dot{\chi }={{\gamma }_{\chi }}m{{z}_{3}}\bar{\omega }\), we obtain
Theorem 1
Assume that the system (5–7) satisfies Assumptions 1–4. Using the proposed boundary control scheme (8), (13), (17), and (20)–(23), the following properties hold.
(1) The control input is bounded, and its bound is described as:
(2) The uniform boundedness of the system is proven, that is w(x, t) satisfies the following inequality
where \(C=\sqrt{\frac{2L}{\beta T{{\alpha }_{2}}}\left( V_{0}{{e}^{-\lambda t}}+\frac{{{\varepsilon }_{0}}}{\lambda } \right) }\). \(V_{0}\) is the initial value of V(t), and the parameters \(\beta \), \({{\alpha }_{2}}\), \(\lambda \) and \({\varepsilon }_{0}\) are given in the process of proof in Appendix.
3) Provided that \(\left| w(L,0)\right| < b \), then w(L, t) will keep in the following area \(\left| w(L,t)\right| < b \).
Proof
See Appendix. \(\square \)
Remark 2
From the proof process, we can see that the size of C will decrease with the increase in the control gain \(c_{2} \), \(c_{3} \) and l, which will produce a better vibration reduction performance when the parameters \(c_{1} \), \(\beta \), \(\sigma _{1} \), \(\sigma _{2} \) and \(\sigma _{3} \) are chosen as proper values. However, a very large control gain \(c_{2} \) and l could result in the instability of system. Hence, the control gains should be chosen prudently for satisfying the certain performance indicators in a real world application.
Moreover, the transient performance of the deflection w(L, t) can be guaranteed, i.e., w(L, t) satisfies the following condition \(\left| w(L,t)\right| <b\).
Remark 3
The control scheme proposed in this paper can handle input saturation and output constraint effectively. As we know, the control design which is on the basis of traditional truncated models will result in spillover problems when the high-frequency models are ignored. However, the controller design and stability analysis in this paper are based on the original PDEs, which can avoid these problems.
4 Numerical simulations
For the purpose of illustrating the system performance, we utilize a finite difference method [38,39,40,41] to compute numerical solution . And the simulations are implemented to demonstrate the validity of the presented control scheme (8) (13), (17), and (20) - (23). The disturbances d(t) and f(x, t) are described as: \(d(t)=0.1+0.1\sin (0.1\pi t)+0.1\sin (0.2\pi t)+0.1\sin (0.3\pi t)\) and \(f(x,t)=[1+\sin (0.1\pi xt)+\sin (0.2\pi xt)+\sin (0.3\pi xt)]/(10L)\). The initial values are \(w(x,0)=0.05x\) and \(\dot{w}(x,0)=0\). The boundary output restriction \(b=0.06\). The constraint on the input u(t) is \(\left| u(t)\right| \le u_{M}=5\). The parameters of the flexible beam are listed in Table 1.
In order to analyze and verify the control effect, the dynamic responses of the flexible beam system are simulated in four cases:
Case 1: The control gains of the proposed control are chosen as \({{c}=12}\), \({{c_{1}}=5}\), \({{c_{2}}=30}\), \({{c_{3}}=20}\), \({{l}=25}\) and \({{\beta }=0.2}\);
Case 2: The control gains of the proposed control are chosen as \({{c}=12}\), \({{c_{1}}=2}\), \({{c_{2}}=5}\), \({{c_{3}}=5}\), \({{l}=10}\) and \({{\beta }=0.2}\);
Case 3: The control gains of the proposed control are chosen as \({{c}=12}\), \({{c_{1}}=0.5}\), \({{c_{2}}=1}\), \({{c_{3}}=1}\), \({{l}=5}\) and \({{\beta }=0.2}\);

Dynamic responses for case 4. a Displacement at the right boundary of the beam. b Displacement of the beam

Displacement w(L, t) of the flexible beam

Displacement of the beam for case 1

Displacement of the beam for case 2

Displacement of the beam for case 3

The control input
Case 4: Without control input: \(u(t)=0\).
The dynamic responses for case 4 are displayed in Fig. 2. It is obvious that the beam’s displacement w(x, t) is large and the displacement w(L, t) transgresses its barrier.
The simulation results for cases 1–3 are displayed in Figs. 3, 4, 5, 6 and 7.
Figure 3 demonstrates the deflection w(L, t). The displacements w(x, t) for cases 1–3 are shown in Figs. 4, 5 and 6. From Figs. 3, 4, 5 and 6, we can get that the presented control for the flexible beam (8) can regulate the displacement greatly within 1 s, and w(x, t) converges to a small neighborhood of zero after 2 s. Therefore, the perfect control performance can be acquired with the presented control scheme even if there are input restriction, output constraint and external disturbances. Figure 7 shows the input signal imposed on the right boundary of the beam.
Moreover, from Fig 3, we apparently see that using the proposed control with the various control gains \({{c_{1}}}\), \({{c_{2}}}\),, \({{c_{3}}}\), and l, the displacement w(L, t) does not transgress its barrier, that is w(L, t) satisfy the bounded output condition \(\left| w(L,t)\right| <{{b}}\). As the control gains increase, the displacement w(L, t) converge to zero more quickly and with less oscillation.
From above analysis of the simulations, we can come to a conclusion that the validity of the control strategy proposed in this paper can be guaranteed in handing the input saturation, output constraint and external disturbances.
5 Conclusion
In this paper, we design a boundary control law to stabilize a flexible beam modeled as a distributed parameter system (DPS) with input restriction, output constraint and external disturbances. The control schemes are proposed based on backstepping method to suppress the beam’s vibration. In the controller design, an auxiliary system based on a smooth hyperbolic function and a barrier Lyapunov function (BLF) are adopted to handle the impact of the restricted input and prevent constraint violation, respectively. The Lyapunov approach is applied for control design and the stability analysis of the close-loop system. The numerical simulations verified the effectiveness of the presented method. Compared with the previous work about the control scheme of the flexible beam, two advantages of the control strategy in the present paper are that: 1) It can stabilize the flexible beam with input and output restrictions, and external disturbances, and 2) the analysis of the system’s uniformly boundedness need not simplify or discretize the partial differential equations (PDEs).
References
Jin, F.F., Guo, B.Z.: Lyapunov approach to output feedback stabilization for the euler-bernoulli beam equation with boundary input disturbance. Automatica 52, 95–102 (2015)
Sapir, A., Hariton, S.A., Skalka, N., Bronshtein, A., Altstein, M.: Dynamic stabilization of an euler-bernoulli beam equation with time delay in boundary observation. Automatica 45(6), 1468–1475 (2009)
Liu, Z., Liu, J., He, W.: Adaptive boundary control of a flexible manipulator with input saturation. Int. J. Control 89(6), 1191–1202 (2016)
Liu, Z., Liu, J., He, W.: Partial differential equation boundary control of a flexible manipulator with input saturation. Int. J. Syst. Sci. 48(1), 53–62 (2017)
Choi, J.Y., Hong, K.S., Yang, K.J., Choi, J.Y., Yang, K.J.: Exponential stabilization of an axially moving tensioned strip by passive damping and boundary control. J. Vib. Control 10(5), 661–682 (2004)
Do, K.D., Pan, J.: Boundary control of three-dimensional inextensible marine risers. J. Sound Vib. 327(3), 299–321 (2009)
He, W., Zhang, S.: Control design for nonlinear flexible wings of a robotic aircraft. IEEE Trans. Control Syst. Technol. 25(1), 351C–357 (2017)
Liu, Y., Zhao, Z., He, W.: Boundary control of an axially moving accelerated/decelerated belt system. Int. J. Robust Nonlinear Control 26, 3849–3866 (2016)
Zhao, Z., Liu, Y., Luo, F.: Output feedback boundary control of an axially moving system with input saturation constrains. ISA Trans. 68, 22–32 (2017)
Guo, B.Z., Kang, W.: Lyapunov approach to the boundary stabilisation of a beam equation with boundary disturbance. Int. J. Control 87(5), 925–939 (2014)
Yang, H., Xia, Y., Shi, P.: Observer-based sliding mode control for a class of discrete systems via delta operator approach. J. Franklin Inst. 347(7), 1199–1213 (2010)
Hong, K.S.: Asymptotic behavior analysis of a coupled time-varying system: application to adaptive systems. IEEE Trans. Autom. Control 42(12), 1693–1697 (1997)
Wu, H.N., Zhu, H.Y., Wang, J.W.: Fuzzy control for a class of nonlinear coupled ode-pde systems with input constraint. IEEE Trans. Fuzzy Syst. 23(3), 593–604 (2015)
He, X., He, W., Shi, J., Sun, C.: Boundary vibration control of variable length crane systems in two-dimensional space with output constraints. IEEE/ASME Trans. Mechatron. 22(5), 1952–1962 (2017)
Zhang, S., He, W., Huang, D.: Active vibration control for a flexible string system with input backlash. IET Control Theory Appl. 10(7), 800–805 (2016)
He, W., Ge, S.S.: Cooperative control of a nonuniform gantry crane with constrained tension. Automatica 66, 146–154 (2016)
Hong, Y., Yao, B.: A globally stable high-performance adaptive robust control algorithm with input saturation for precision motion control of linear motor drive systems. IEEE/ASME Trans. Mechatron. 12(2), 198–207 (2007)
Boulkroune, A., Saad, M.M., Farza, M.: Adaptive fuzzy controller for multivariable nonlinear state time-varying delay systems subject to input nonlinearities. Fuzzy Sets Syst. 164(1), 45–65 (2011)
He, W., He, X., Ge, S.S.: Vibration control of flexible marine riser systems with input saturation. IEEE/ASME Trans. Mechatron. 21(1), 254–265 (2016)
Boulkroune, A., Tadjine, M., Saad, M.M’., Farza, M.: Fuzzy adaptive controller for MIMO nonlinear systems with known and unknown control direction. Fuzzy Sets Syst. 161(6), 797–820 (2010)
Ponce, I.U., Bentsman, J., Orlov, Y., Aguilar, L.T.: Generic nonsmooth H\(\infty \) output synthesis: application to a coal-fired boiler/turbine unit with actuator dead zone. IEEE Trans. Control Syst. Technol. 23(6), 2117–2128 (2015)
Hu, C., Yao, B., Wang, Q.: Performance-oriented adaptive robust control of a class of nonlinear systems preceded by unknown dead zone with comparative experimental results. IEEE/ASME Trans. Mechatron. 18(1), 178–189 (2013)
Hu, Q., Zhang, J., Friswell, M.I.: Finite-time coordinated attitude control for spacecraft formation flying under input saturation. J. Dyn. Syst. Meas. Control 137(6), 061012 (2014)
Liu, Z., Liu, J., He, W.: Modeling and vibration control of a flexible aerial refueling hose with variable lengths and input constraint. Automatica 77, 302–310 (2017)
Wen, C., Zhou, J., Liu, Z., Su, H.: Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance. IEEE Trans. Autom. Control 56(7), 1672–1678 (2011)
Boskovic, J.D., Li, S.M., Mehra, R.K.: Robust adaptive variable structure control of spacecraft under control input saturation. J. Guid. Control Dyn. 24(1), 14–22 (2001)
Grimm, G., Hatfield, J., Postlethwaite, I., Teel, A.R., Turner, M.C., Zaccarian, L.: Antiwindup for stable linear systems with input saturation: an LMI-based synthesis. IEEE Trans. Autom. Control 48(9), 1509–1525 (2003)
Mulder, E.F., Kothare, M.V., Morari, M.: Multivariable anti-windup controller synthesis using linear matrix inequalities. Automatica 37(9), 1407–1416 (2001)
El-Farra, N.H., Armaou, A., Christofides, P.D.: Analysis and control of parabolic pde systems with input constraints. Automatica 39(4), 715–725 (2003)
Ailon, A.: Simple tracking controllers for autonomous vtol aircraft with bounded inputs. IEEE Trans. Autom. Control 55(3), 737–743 (2010)
Ren, B., Ge, S.S., Tee, K.P., Lee, T.H.: Adaptive neural control for output feedback nonlinear systems using a barrier Lyapunov function. IEEE Trans. Neural Netw. 21(8), 1339–1345 (2010)
Tee, K.P., Ge, S.S.: Control of nonlinear systems with partial state constraints using a barrier Lyapunov function. Int. J. Control 84(12), 2008–2023 (2011)
He, W., Sun, C., Ge, S.S.: Top tension control of a flexible marine riser by using integral-barrier Lyapunov function. IEEE/ASME Trans. Mechatron. 20(2), 497–505 (2015)
Niu, B., Zhao, J.: Barrier lyapunov functions for the output tracking control of constrained nonlinear switched systems. Syst. Control Lett. 62(10), 963–971 (2013)
He, W., Ge, S.S.: Vibration control of a flexible string with both boundary input and output constraints. IEEE Trans. Control Syst. Technol. 23(4), 1245–1254 (2015)
Krstic, M., Kanellakopoulos, I., Kokotovic, P.V.: Nonlinear and Adaptive Control Design. Wiley, Hoboken (2004)
Ge, S.S., Hong, F., Lee, T.H.: Adaptive neural control of nonlinear time-delay systems with unknown virtual control coefficients. IEEE Trans. Syst. Man Cybern. Part B Cybern. 34(1), 499–516 (2004)
Nguyen, Q.C., Hong, K.S.: Asymptotic stabilization of a nonlinear axially moving string by adaptive boundary control. J. Sound Vib. 329(22), 4588–4603 (2010)
Wang, J.W., Wu, H.N., Li, H.X.: Distributed proportional-spatial derivative control of nonlinear parabolic systems via fuzzy pde modeling approach. IEEE Trans. Syst. Man Cybern. Part B Cybern. 42(3), 927–938 (2012)
Wu, H.N., Li, H.X.: Finite-dimensional constrained fuzzy control for a class of nonlinear distributed process systems. IEEE Trans. Syst. Man Cybern. Part B Cybern. 37(5), 1422–1430 (2007)
Yang, K.J., Hong, K.S., Matsuno, F.: Robust adaptive boundary control of an axially moving string under a spatiotemporally varying tension. J. Sound Vib. 273(4), 1007–1029 (2004)
Rahn, C.D., Rahn, C.D.: Mechatronic Control of Distributed Noise and Vibration. Springer, New York (2001)
Acknowledgements
This work was supported by the National Natural Science Foundation of China [grant number 61374048] and the Excellence Foundation of BUAA for PhD Students [grant number 2017020].
Author information
Authors and Affiliations
Corresponding author
Appendix: Proof of Theorem
Appendix: Proof of Theorem
Consider a Lyapunov functional
where the first two terms \({{V}_{a1}}(t)\) and \({{V}_{a2}}(t)\) are
where the constant \(\beta >0 \).
We firstly notice the term \({{V}_{a2}}(t)\). It satisfies the following inequality
where \({{\alpha }_{1}}=\frac{2\rho L}{\min (\beta \rho L,\beta T)}\).
Choosing \(\beta \) as a positive constant satisfying \(\beta>\frac{2\rho L}{\min (\rho L,T)}>0\), we obtain \(0<{{\alpha }_{1}}<1\), we further obtain
Considering Eqs. (30) and (31), we have
Then differentiating Eq. (30) with respect to time, we obtain
Applying Eqs. (5) and boundary equations, using integration by parts, we get
Considering Eqs. (10) and (13) yields
Similarly, combining Eq. (5) and boundary equations, using integration by parts, then according to Lemmas 10 and 11 in [42], we get
Then substituting Eqs. (29), (37) and (38) into Eq. (35) yields
where the constant \({{\sigma }_{3}}>0\), and \(\varepsilon =\left( \frac{1}{2}{{\sigma }_{2}}+\beta \frac{1}{2}{{\sigma }_{3}} \right) \int _{0}^{L}{{{{\bar{f}}}^{2}}\mathrm{d}x}+\frac{1}{2l}{{\bar{d}}^{2}}\).
Choosing parameters \({{c}_{1}}\), \({{c}_{2}}\), \({{c}_{3}}\), l, \({{\sigma }_{1}}\),\({{\sigma }_{2}}\) \({{\sigma }_{3}}\) and \(\beta \) to satisfy the following conditions:
According to Lemma 2 in [31], we obtain
where \({{\lambda }_{1}}=\min \left( 2{{\gamma }_{1}},\frac{2{{\gamma }_{2}}}{m},\frac{2{{\gamma }_{3}}}{m},\frac{2{{\gamma }_{4}}}{\beta \rho },\frac{2{{\gamma }_{5}}}{\beta EI},\frac{2{{\gamma }_{6}}}{\beta T} \right) \).
Combining Eqs. (34) and (46), we have
where \(\lambda ={{{\lambda }_{1}}}/{{{\alpha }_{3}}}\;>0\).
Then multiplying (47) by \({{e}^{\lambda t}}\), we obtain
Integrating of the inequality (48), we have
where \(\varepsilon _{0}=\varepsilon +\frac{\lambda }{{{\gamma }_{\chi }}}\int _{0} ^{t}{\left( \xi N\left( \chi \right) -1\right) \dot{\chi }{{e} ^{-\lambda \left( t-\tau \right) }}d\tau }\).
Applying Lemma 2 in [37], we have a conclusion that V(t), \(\chi \) and \(\int _{0} ^{t}{\left( \xi N\left( \chi \right) -1 \right) \dot{\chi }d\tau }\) are bounded on \(\left[ 0,t \right) \).
We can further obtain the boundedness of the states \({{z}_{1}}\), \({{z}_{2}}\), \({{z}_{3}}\), w(x, t), \(w_{t}(x,t)\), \({w}_{x}(x,t)\) and \({w}_{xx}(x,t)\). According to Assumptions 3 and 4, we get the boundedness of \({w}_{xxx}(x,t)\), \(w_{tx}(x,t)\) and \(w_{txxx}(x,t)\) . Moreover, according to Assumption 1 and Eq. (6), we can acquire the boundedness of \(w_{tt}(x,t)\), \(w_{ttx}(x,t)\) and \(w_{ttxxx}(x,t)\). Note that
Then we can obtain that \(\bar{\omega }\) is bounded from Eqs. (50–52) and (23). This further implies that \(\omega \) and \(u_{0}(t)\) are bounded.
Moreover, combining with Eq. (34) and according Lemma 10 in [42], we have
Then we have \(\left| w(x,t) \right| \le \sqrt{\frac{2L}{\beta T{{\alpha }_{2}}}\left( V_{0}{{e}^{-\lambda t}}+\frac{{{\varepsilon }_{0}}}{\lambda } \right) }\), \(\forall x\in [0,L]\), we obtain w(x, t) is uniformly bounded.
Equations (34) and (25) indicates \({{{{V}}}_{b}}(t)\) is nonnegative and bounded \(\forall t\in [0,\infty )\). From the term \({{{{V}}}_{b}}(t)\), we can see that \({{{{V}}}_{b}}(t)\rightarrow \infty \), as \(\left| w(L,t)\right| \rightarrow b\). Supposing \(\left| w(L,0)\right| <b\), and according to Lemma 1 presented in [31], we infer that w(L, t) satisfies the inequality \(\left| w(L,t)\right| < b \).
Rights and permissions
About this article

Cite this article
Liu, Z., Liu, J. & He, W. Boundary control of an Euler–Bernoulli beam with input and output restrictions. Nonlinear Dyn 92, 531–541 (2018). https://doi.org/10.1007/s11071-018-4073-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4073-9