
Abstract
In this paper, we investigate the periodic dynamical behaviors for a class of general Cohen–Grossberg neural networks with discontinuous right-hand sides and mixed time delays involving both time-varying delays and distributed delays. In view of functional differential inclusions theory, we obtain the existence of global solutions. By means of functional differential inclusions theory and fixed-point theorem of multi-valued maps, the existence of one and multiple positive periodic solutions for the neural networks is given. It is worthy to point out that, without assuming the boundedness or under linear growth condition of the discontinuous neuron activation functions, our results on the existence of one and multiple positive periodic solutions will also be valid. We derive some sufficient conditions for the global exponential stability and convergence of the discontinuous neural networks, in terms of non-smooth analysis theory with generalized Lyapunov approach. Finally, we give some numerical examples to show the applicability and effectiveness of our main results.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Recently, neural networks with discontinuous (or non-Lipschitz, or non-smooth) neuron activations have been found useful to address a number of interesting engineering tasks, such as dry friction, impacting machines, systems oscillating under the effect of an earthquake, power circuits, switching in electronic circuits, linear complimentarily systems, and therefore have received a great deal of attention in the literature [1–7]. It is well known that, in the paper [1], under the framework of the theory of Filippov differential inclusions, Forti and Nistri were the first who dealt with the global stability of a neural network modeled by a differential equation with a discontinuous right-hand side. As Forti and Nistri pointed out, neural networks with discontinuous neuron activations are important and do frequently arise in the applications. For example, consider the classical Hopfield neural networks with graded response neurons [7, 8]. Under the standard hypothesis of high-gain amplifiers, the sigmoidal neuron activations would closely approach a discontinuous hard comparator function. Moreover, the analysis of discontinuous neural networks can reveal many specially interesting and important traits of the dynamics such as the phenomenon of convergence in finite time toward the equilibrium point or limit cycle. Thus, it is of practical importance to explore the dynamical behaviors of discontinuous neural networks.
Note that the properties of periodic solutions are of great interest, which have been successfully applied in many neural networks, such as many biological and cognitive activities (for example heartbeat, respiration, mastication, and locomotion, and memorization) require repetition. Moreover, an equilibrium point can be regarded as a special case of periodic solution for neural networks with arbitrary period. Therefore, the analysis of periodic solutions for neural networks is more general and interesting. In [9], the authors studied the global exponential stability of the periodic solution for a delayed neural network with discontinuous neuron activations. In [10–18], by using the theory of fixed point in differential inclusion and Lyapunov approach, the authors analyzed the problems of periodic solutions for various neural networks with discontinuous neuron activations.
However, the discontinuous neuron activations considered in these papers are bounded or satisfy the growth condition. As pointed out by Gonzalez [19], to truly exploit the potential of neural networks, a nonlinear activation function must be used. Virtually, all neural networks use nonlinear activation functions at some point within the network. This permits the network to reproduce nonlinear patterns in complex data sets. There are several types of nonlinear activation functions, such as the log-sigmoid transfer function and the tan-sigmoid transfer function. When dealing with a dependent variable that is not bounded, we could choose an unbounded nonlinear activation function such as \(f(x)=x^3\). Thus, it is interesting and practical to investigate neural networks with discontinuous neuron activations which are unbounded or satisfy nonlinear growth condition.
As pointed out by [20], the coexistence of multiple equilibria is necessary in the applications of neural networks for associative memory storage, pattern recognition, decision making, digital selection, and analogy application. In [21–30], some methods guaranteeing the existence of many equilibria or multiple periodic solutions of neural networks have been derived. However, all of the above works were based on the assumption that the activation functions are continuous, even piecewise linear functions. To the existence of many equilibria or multiple periodic solutions of neural networks with general activation functions, even discontinuous activations, the methods used in [21–30] will be invalid. Therefore, it is very difficult to obtain the existence of many equilibria or multiple periodic solutions of neural networks with discontinuous activations. And a few results have been obtained on the existence of many equilibria or multiple periodic solutions of neural networks with discontinuous activations. Motivated by the above discussion, one of the main contributions of this paper is to investigate the existence of one and multiple periodic solutions of neural networks with discontinuous neuron activations.
Because of finite switching speed of amplifiers and communication time, in many practical applications of neural networks like communication systems, electric power systems with lossless transmission lines, control, image processing, pattern recognition, signal processing and associative memory, time delays are often inevitable. Moreover, as Forti et al. pointed out, it is interesting and important to investigate discontinuous neural networks with more general delays, such as time-varying or distributed ones. In fact, in electronic implementation of analog neural networks, the delays between neurons are usually time-varying and sometimes vary violently with time due to the finite switching speed of amplifiers and faults in the electrical circuit [31, 32]. On the other hand, although the models with discrete delays is a good approximation in simple circuits consisting of only a small number of cells, neural networks usually have a spatial extent due to the presence of a multitude of parallel pathways with a variety of axon sizes and lengths. Thus it is common to have a distribution of propagation delays. In these circumstances, the signal propagation is not instantaneous, and it cannot be modeled by discrete delays. A more appropriate approach is to incorporate continuously distributed delays [33, 34]. It is worthy to pointed out that, time delays can affect the stability of the neural network systems and may lead to some complex dynamic behaviors such as oscillation, chaos, and instability. Thus, it is of great importance to explore the dynamical behaviors of neural networks with mixed delays. Hence, we consider the more general type of delays, such as time-varying and distributed ones, which are general more complex, and therefore, they are more difficult to deal with.
On the other hand, Cohen–Grossberg neural network (CGNN) model is an important recurrent neural network model, which was first described by Cohen and Grossberg in 1983 [35]. It is easy to see that CGNN include a range of well-known ecological models and neural networks such as the Lotka–Volterra system, the bidirectional associative memory (BAM) neural networks [36, 37], and the Hopfield neural networks [7, 8]. In recent years, CGNNs with or without delays have been extensively studied due to the potential for applications in classification, parallel computing, associative memory, especially in solving some optimization problems. Such applications depend on the existence and uniqueness of equilibrium points and the qualitative properties of stability, so the qualitative analysis of these dynamical behaviors is important in the practical design and applications of neural networks. Many researchers have investigated the delayed or without delayed Cohen–Grossberg neural networks [25, 38].
There are also some works on CGNN discontinuous neuron activations with time delays [39–45]. In [39, 40], the authors studied the stability of delayed CGNN with discontinuous neuron activation. Some sufficient conditions were obtained to ensure the existence, uniqueness, and global stability of the equilibrium point of the neural network, respectively. In [41], the authors investigated the nonnegative periodic dynamics of delayed Cohen–Grossberg neural networks with discontinuous activations. In [42], based on the Mawhin-like coincidence theorem, the authors studied the periodic dynamics of delayed Cohen–Grossberg neural networks with discontinuous activations. In [43], the authors investigated the existence, uniqueness, and global stability of periodic solution in view of fixed-point theorem of set-valued maps and non-smooth analysis theory. However, there are no results on multiple periodic solutions for delayed CGNN with discontinuous neuron activations.
Motivated by the above works, in this paper, we consider the following general CGNN model with discontinuous activations:

or equivalently in the vector form
where \(x(t)=(x_1(t),x_2(t),\ldots ,x_n(t))^T\in \mathbb {R}^n\) and \(x_i(t)\) represents the state of the ith unit at time t; \(Q(x(t))=\hbox {diag}(q_1(x_1(t)),q_2(x_2(t)),\ldots ,q_n(x_n(t)))\) and \(q_i(x_i(t))\) denotes amplification function of the ith neuron; \(D(t)=\hbox {diag}(d_1(t),d_2(t),\ldots ,d_n(t))\) and \(d_i(t)>0\) is the self-inhibition of the ith neuron; \(A(t)=(a_{ij}(t))_{n\times n}\) and \(a_{ij}(t)\) is the connection strength of the jth neuron on the ith neuron; \(B(t)=(b_{ij}(t))_{n\times n}\), \(C(t)=(C_{ij}(t))_{n\times n}\), \(b_{ij}(t)\) and \(c_{ij}(t)\) are the delayed feedbacks of the jth neuron on the ith neuron, with time-varying and distributed delay, respectively; \(\tau (t)\) is the time-varying delay; \(l(s)=(l_1(s),l_2(s),\ldots ,l_n(s))^T\) and \(l_i(t)\) is the probability kernel of the distributed delay; \(f(x(t))=(f_1(x_1(t)),f_2(x_2(t)),\ldots ,f_n(x_n(t)))^T{:}\mathbb {R}^n{\rightarrow } \mathbb {R}^n\) and \(f_i(x_i(t))\) denotes the neuron input-output activation of the ith neuron; \(I(t)=(I_1(t),I_2(t),\ldots ,I_n(t))^T\in \mathbb {R}^n\) and \(I_i(t)\) denotes the external input to the ith neuron.
The neuron activation functions in (1.1) are assumed to satisfy the following properties:
(H1) For every \(i=1,2,\ldots ,n\), \(f_i\) is continuous except on a countable set of isolate points \(\rho _k^i\), where there exist finite right limits \(\lim _{x_i\rightarrow {(\rho _k^i)}^+}f_i(x_i)\triangleq f_i^+(\rho _k^i)\) and left limits \(\lim _{x_i\rightarrow {(\rho _k^i)}^-}f_i(x_i)\triangleq f_i^-(\rho _k^i)\), respectively. Moreover, \(f_i\) has a finite number of discontinuous points on any compact interval of \(\mathbb {R}\).
(H2) For each \(i=1,2,\ldots ,n\), there exist nonnegative continuous functions \(W_i\) such that
where \(\overline{co}[f_i(x_i)]=[\min \{f_i^-(x_i),f_i^+(x_i)\},\max \{f_i^-(x_i),f_i^+(x_i)\}]\).
Throughout this paper, we always assume that \(d_i(t), a_{ij}(t), b_{ij}(t), \tau (t), I_i(t)\) are continuous \(\omega \)-periodic functions, where \(i,j=1,2,\ldots ,n\); \(\tau (t)\geqslant 0\), \(d_i(t)>0\) for each \(i=1,2,\ldots ,n\) and \(t>0\). \(q_i(x)\) are all positive, continuous and bounded functions, there exist positive constants \(q_i^l, q_i^M\) such that \(0<q_i^l\leqslant q_i(x)\leqslant q_i^M\), for \(\forall x\in \mathbb {R}\) and \(i,j=1,2,\ldots ,n\). The delay kernels \(l_{j}:[0,+\infty )\rightarrow \mathbb {R}\) are continuous, integrable, and there exist constants \(L_{j}\) such that \(\int _0^{+\infty }|l_{j}(s)|ds\leqslant L_{j}\), \(j=1,2,\ldots ,n\).
For convenience, we shall introduce the notations
where g(t) is an \(\omega \)-periodic function.
The main contributions of this paper include three aspects. First, for the delayed differential equations with discontinuous right-hand sides, we obtain the existence of global solution. Second, by using the fixed-point theorem of multi-valued maps, we study the periodicity and multiperiodicity of the neural networks with discontinuous neuron activations. Third, in terms of non-smooth analysis theory and Lyapunov-like approach, we discuss the global exponential stability of the neural networks with discontinuous neuron activations.
2 Preliminaries
Note that CGNN model (1.1) is defined as a piecewise continuous vector function, and the classical definition of solutions has been shown to be invalid. To deal with the differential equation with discontinuous right-hand side, a solution in the sense of Filippov [46, 47] is particularly useful because Filippov solutions are good approximation of solutions of actual systems that possess nonlinearities with very high slop. To specify what is meant by a solution of the delayed differential equation (1.1) with a discontinuous right-hand side, we extend the concept of the Filippov solutions with the delayed differential equation (1.1) as follows:
Definition 2.1
A vector function \(x\!=\!(x_1,x_2,\ldots ,x_n)^T:({-}\infty ,\mathcal {T}){\rightarrow } \mathbb {R}^n, \mathcal {T}\in (0,{+}\infty ]\), is a state solution of the discontinuous system (1.1) on \((-\infty ,\mathcal {T})\) if
-
(1)
x is continuous on \((-\infty ,\mathcal {T})\) and absolutely continuous on any compact interval of \([0,\mathcal {T})\);
-
(2)
there exists a measurable function \(\gamma =(\gamma _1,\gamma _2,\ldots ,\gamma _n)^T:(-\infty ,\mathcal {T})\rightarrow \mathbb {R}^n\) such that \(\gamma _j(t)\in \overline{co}[f_j(x_j(t))]\) for a.e. \(t\in (-\infty ,\mathcal {T})\) and
$$\begin{aligned} \dfrac{\hbox {d}x_i(t)}{\hbox {d}t}&= q_i(x_i(t))\mathcal {F}_i(t,\gamma ),\ \ \hbox {for a.e.}\ t\in [0,\mathcal {T}), \nonumber \\ i&=1,2,\ldots ,n \end{aligned}$$(2.1)where
$$\begin{aligned} \mathcal {F}_i(t,\gamma )= & {} -d_i(t)x_i(t)+\sum _{j=1}^na_{ij}(t)\gamma _j(t) \\&+\sum _{j=1}^nb_{ij}(t)\gamma _j(t-\tau (t)) +\sum _{j=1}^nc_{ij}(t) \\&\times \int _0^{+\infty }\gamma _j(t-s)l_{j}(s)\hbox {d}s+I_i(t). \end{aligned}$$Any function \(\gamma =(\gamma _1,\gamma _2,\ldots ,\gamma _n)^T\) satisfying (2.1) is called an output solution associated with the state \(x=(x_1,x_2,\ldots ,x_n)^T\). With this definition, it turns out that the state \(x=(x_1,x_2,\ldots ,x_n)^T\) is a solution of (1.1) in the sense of Filippov since it satisfies
$$\begin{aligned}&\dfrac{\hbox {d}x_i(t)}{\hbox {d}t}\in q_i(x_i(t))\mathcal {F}_i(t,f),\ \ \hbox {for a.e.}\ t\in [0,\mathcal {T}), \nonumber \\&\quad i=1,2,\ldots ,n \end{aligned}$$(2.2)where
$$\begin{aligned}&\mathcal {F}_i(t,f)=-d_i(t)x_i(t)+\sum _{j=1}^na_{ij}(t)\overline{co}[f_j(x_j(t))] \\&\quad +\sum _{j=1}^nb_{ij}(t)\overline{co}[f_j(x_j(t-\tau (t)))]+\sum _{j=1}^nc_{ij}(t) \\&\quad \times \int _0^{+\infty }\overline{co}[f_j(x_j(t-s))]l_{j}(s)\hbox {d}s+I_i(t). \end{aligned}$$
For an initial value problem (IVP) associated with the CGNN neural network (1.1), we follow the definition introduced by Forti et al. in [1, 9].
Definition 2.2
(IVP). For any continuous function \(\phi \,{=}\,(\phi _1,\phi _2,\ldots ,\phi _n)^T\,{:}\,(-\infty ,0]\rightarrow \mathbb {R}^n\) and any measurable selection \(\psi \,{=}\,(\psi _1,\psi _2,\ldots ,\psi _n)^T\,{:}\,(-\infty ,0]\!\rightarrow \!\mathbb {R}^n\), such that \(\psi _j(s)\in \overline{co}[f_j(\phi _j(s))] (j=1,2,\ldots ,n)\) for a.e. \(s\in (-\infty ,0]\) by an initial value problem associated with (1.1) with initial condition \([\phi ,\psi ]\), we mean the following problem: find a couple of functions \([x,\gamma ]\,{:}\,(-\infty ,\mathcal {T})\rightarrow \mathbb {R}^n\times \mathbb {R}^n\), such that x is a solution of (1.1) on \((-\infty ,\mathcal {T})\) for some \(\mathcal {T}>0\), \(\gamma \) is an output solution associated with x, and
Throughout this paper, the initial functions \(\phi \) and \(\psi \) (as described in Definition 2.2) satisfy the following: \(\phi \) is a bounded continuous function from \((-\infty ,0]\) to \(\mathbb {R}^{n}\) and \(\psi \) is an essentially bounded measurable function from \((-\infty ,0]\) to \(\mathbb {R}^{n}\).
The following proposition shows that the solutions in the sense of Filippov of system (1.1) exist globally.
Proposition 2.1
(See Appendix A for a Proof). Suppose that the conditions (H1), (H2) and (H3) there exists a nonnegative and monotonically nondecreasing function W(x), such that
be satisfied. Then each solution x(t) of the system (1.1) in the sense of Filippov exists on the interval \([0,+\infty )\), i.e., the solution x(t) of the functional differential inclusions (2.2) with the initial condition \([\phi ,\psi ]\) exists on the interval \([0,+\infty )\).
Remark 1
If W(x) is bounded or satisfies \(W(x)=\,a|x|^{\alpha }+b (\alpha \in (0,1], a,b\,{\geqslant }\,0)\), then the condition (H3) holds. That is to say, Proposition 2.1 generalizes and improves the corresponding results of some earlier literature, such as Theorem 1 of [4], Property 2 of [6], Lemma 2 of [17], Theorem 3.1 of [18], and Lemma 2 of [41]. Moreover, for a class of more general functional differential inclusions, such as \(x^\prime (t)\in F(t,x(t),x(t-\tau ))\), \(x^\prime (t)\in F(t,x(t),x(t-\tau (t)),x(t-\sigma (t)))\), the global existence of solutions can be similarly dealt with.
Next, let us introduce some basic concepts and facts from multi-valued analysis which will be used throughout this paper [48–56].
Let \(([0,\omega ],\mathfrak {L})\) denote the Lebesgue measurable space and \(\mathbb {R}^n(n\geqslant 1)\) be an n-dimensional real Euclidean space with inner product \(\langle \cdot ,\cdot \rangle \) and induced norm \(||\cdot ||\). Suppose \(E\subset \mathbb {R}^n\), then \(x\mapsto F(x)\) is called a multi-valued map from \(E\hookrightarrow \mathbb {R}^n\), if for each point x of a set \(E\subset \mathbb {R}^n\), there corresponds a non-empty set \(F(x)\subset \mathbb {R}^n\). F is said to have a fixed point if there is \(x\in E\) such that \(x\in F(x)\). For the sake of convenience, we introduce the following notations:
Let \(A\subset P_{cl}(\mathbb {R}^n)\), then the distance from x to A is given by dist\((x,A)=\inf \{||x-a||:a\in A\}\). On \(P_{cl}(\mathbb {R}^n)\) we can define a generalized metric known in the literatures as “Hausdorff metric,” by setting
where
It is well known that \(P_{cl}(\mathbb {R}^n)\) is a complete metric space with the Hausdorff metric \(\rho \) and \(P_{cl,cv}(\mathbb {R}^n)\) is a closed subset of it.
Definition 2.3
A multi-valued map F with non-empty values is said to be upper semi-continuous (USC) at \(x_0\in E\), if \(\beta (F(x),F(x_0))\rightarrow 0\) as \(x\rightarrow x_0\). F(x) is said to have a closed (convex, compact) image if for each \(x\in E\), F(x) is closed (convex, compact). A multi-valued map \(F:[0,\omega ]\rightarrow P_{cl}(\mathbb {R}^n)\) is said to be measurable, if for each \(x\in \mathbb {R}^n\), the \(\mathbb {R}_+\) valued function \(t\mapsto \hbox {dist}(x,F(t))=\inf \{||x-v||:v\in F(t)\}\) is measurable. This definition of measurability is equivalent to saying that
(graph measurability), where \(\mathfrak {L}([0,\omega ])\) is the Lebesgue \(\sigma \)-field of \([0,\omega ]\), \(\mathfrak {B}(\mathbb {R}^n)\) is the Borel \(\sigma \)-field of \(\mathbb {R}^n\).
For notational purposes, for \(\varrho >0\) let
As a matter of convenience, we recall the fixed-point theorem of multi-valued maps due to Agarwal and O’Regan. (see [50] Theorems 2.3 and 2.7).
Lemma 2.1
Let \(X=(X,||\cdot ||_{X})\) be a Banach space and \(E\subseteq X\) a closed, convex, non-empty set with \(\alpha u+\beta v\in E\) for all \(\alpha \geqslant 0, \beta \geqslant 0\) and \(u,v\in E\). And let r, R be positive constants with \(0<r<R\). Suppose \(F:\overline{\Omega }_R\rightarrow P_{cp,cv}(E)\) (here \(P_{cp,cv}(E)\) denotes the family of non-empty, compact, convex subset of E) is a USC, k-set-contractive (here \(0\leqslant k<1\)) map and assume the following conditions hold:
-
(1)
\(x\not \in \lambda F(x)\ \ \ \hbox {for}\ \ \lambda \in [0,1)\ \ \hbox {and}\ \ x\in \partial \Omega _{R}\),
-
(2)
\(\hbox {there exist a}\ v\,{\in }\, E\backslash \{\theta \}\ \hbox {with}\ x\,{\not \in }\, F(x)+\delta v\ \ \delta \,{>}\,0 \hbox {and}\ \ x\in \partial \Omega _{r}\).
Then F has a fixed point in \(\{x:x\in E\) and \(r\leqslant ||x||_X\leqslant R\}\).
Lemma 2.2
Let \(X=(X,||\cdot ||_{X})\) be a Banach space and \(E\subseteq X\) a closed, convex, non-empty set with \(\alpha u+\beta v\in E\) for all \(\alpha \geqslant 0, \beta \geqslant 0\) and \(u,v\in E\). And let r, R be positive constants with \(0<r<R\). Suppose \(F:\overline{\Omega }_R\rightarrow P_{cp,cv}(E)\) (here \(P_{cp,cv}(E)\) denotes the family of non-empty, compact, convex subset of E) is a USC, k-set-contractive (here \(0\leqslant k<1\)) map and assume the following conditions hold:
-
(1)
\(x\not \in \lambda F(x)\ \ \ \hbox {for}\ \ \lambda \in [0,1)\ \ \hbox {and}\ \ x\in \partial \Omega _{r}\),
-
(2)
\(\hbox {there exist a}\ v\in E\backslash \{\theta \}\ \hbox {with}\ x\not \in F(x)+\delta v\ \ \delta >0\ \ \hbox {and}\ \ x\in \partial \Omega _{R}\).
Then F has a fixed point in \(\{x:x\in E\) and \(r\leqslant ||x||_X\leqslant R\}\).
Definition 2.4
[52]. A multi-valued map \(F:[0,\omega ]\times E\rightarrow P(E)\) is called \(L^1\)-Carathéodory if
-
(1)
\(t\rightarrow F(t,u)\) is measurable with respect to t for every \(u\in E\);
-
(2)
\(t\rightarrow F(t,u)\) is USC with respect to u for a.e. \(t\in [0,\omega ]\);
-
(3)
for each \(q>0\), there exists \(h_q\in L^1([0,\omega ], [0,\infty ))\) such that \(|||F(t,u)|||\triangleq \sup \{|v|:v\in F(t,u)\}\leqslant h_q(t)\) for all \(||u||\leqslant q\) and for a.e. \(t\in [0,\omega ]\).
The following lemma will be used in the proof.
Lemma 2.3
[53]. Let J be a compact real interval, \(F:J\times E\rightarrow P_{cb,cl,cv}(E)\), \((t,x)\rightarrow F(t,x)\ (\)here \(P_{cb,cl,cv}(E)\) denote the set of all bounded, closed, convex and non-empty subsets of E) a \(L^1\)-Carathéodory multi-valued map, \(S_{F,x}\ (\)here \(S_{F,x}=\{f_x\in L^1(J,E):f_x(t)\in F(t,x)\) for a.e. \(t\in J\})\) be non-empty for each fixed \(x\in E\) and let \(\Gamma \) be a linear continuous mapping from \(L^1(J,E)\) to C(J, E). Then the map \(\Gamma \circ S_{F}:C(J,E)\rightarrow P_{cb,cl,cv}(C(J,E))\), \(y\rightarrow (\Gamma \circ S_{F})(y)=\Gamma (S_{F,y})\) is a closed graph map in \(C(J,E)\times C(J,E)\).
Definition 2.5
A solution x(t) of the given IVP of system (1.1) on \([0,+\infty )\) is a periodic solution with period \(\omega \) if \(x(t+\omega )=x(t)\) for all \(t\geqslant 0\).
Definition 2.6
Let \(x^{*}(t)=(x_1^{*}(t),x_2^{*}(t),\ldots ,x_n^{*}(t))^T\) be a solution of the given IVP of system (1.1), \(x^{*}(t)\) is said to be globally exponentially stable, if for any solution \(x(t)=(x_1(t),x_2(t),\ldots ,x_n(t))^T\) of (1.1), there exist constants \(M>0\) and \(\delta >0\) such that
Suppose that \(x(t):[0,+\infty )\rightarrow \mathbb {R}^n\) is absolutely continuous on any compact interval of \([0,+\infty )\). We give a chain rule for computing the time derivative of the composed function \(V(x(t)):[0,+\infty )\rightarrow \mathbb {R}\) as follows.
Lemma 2.4
(Chain Rule) [47, 56]. Suppose that \(V(x):\mathbb {R}^n\rightarrow \mathbb {R}\) is C-regular and that \(x(t):[0,+\infty )\rightarrow \mathbb {R}^n\) is absolutely continuous on any compact interval of \([0,+\infty )\). Then, x(t) and \(V(x(t)):[0,+\infty )\rightarrow \mathbb {R}\) are differential for a.e. \(t\in [0,+\infty )\), and we have
where \(\partial V(x(t))\) is the Clark generalized gradient of V at x(t).
3 Periodicity and multiperiodicity
In this section, under some conditions, we investigate the periodicity and multiperiodicity of IVP for the system (1.1) with discontinuous neuron activations. Our approaches are based on the application of fixed-point theorem of multi-valued maps due to Agarwal and O’Regan [50] and the functional differential inclusions theory.
Lemma 3.1
(See Appendix B for a Proof) Vector function \(x(t)=(x_1(t),x_2(t),\ldots ,x_n(t))^T\) is a \(\omega \)-periodic solution of the system (1.1) in the sense of Filippov if and only if \(x(t)=(x_1(t),x_2(t),\ldots ,x_n(t))^T\) is a \(\omega \)-periodic solution the following integral inclusions
where
Let us define
Then X is a Banach space with the above norm \(||\cdot ||_X\). Define a cone \(\mathbb {P}\) in X by
where \(\kappa _i=\dfrac{g_i}{G_i}\) and \(g_i=\dfrac{1}{e^{q_i^Md_i^M}-1}\), \(G_i=\dfrac{\hbox {e}^{q_i^Ld_i^L}}{\hbox {e}^{q_i^Ld_i^L}-1}\).
Define the multi-valued map \(\varphi :X\rightarrow P(X)\) by
where
It follows from Lemma 3.1 that, the existence problem of \(\omega \)-periodic solutions to the system (1.1) is equivalent to the existence problem of \(\omega \)-periodic solutions to the integral inclusions (3.1). Hence, if \(x^*(t)=(x_1^*(t),x_2^*(t),\ldots ,x_n^*(t))^T\in X\) is a fixed point of the multi-valued map \(\varphi (x)\), then \(x^*(t)\) is a positive \(\omega \)-periodic solution of the system (1.1). In the following discussion, we will solve the fixed-point problem by virtue of Lemmas 2.1 and 2.2. For the multi-valued map \(\varphi :X\rightarrow P(X)\), we have the following Lemmas.
Lemma 3.2
(See Appendix C for a Proof). If the conditions (H1), (H2) and (H4) for \(i=1,2,\ldots ,n\) and \(x(t)\in \overline{\Omega }_R\cap \mathbb {P}\), we have
where
hold, then the multi-valued map \(\varphi :\overline{\Omega }_R\cap \mathbb {P}\rightarrow P_{cp,cv}(\mathbb {P})\), i.e., \(\varphi (x)\in P_{cp,cv}(\mathbb {P})\) for each fixed \(x(t)\in \overline{\Omega }_R\cap \mathbb {P}\).
Lemma 3.3
(See Appendix D for a Proof). Assume that the conditions (H1), (H2), and (H4) hold. Then the multi-valued map \(\varphi :\overline{\Omega }_R\cap \mathbb {P}\rightarrow P_{cp,cv}(\mathbb {P})\) is a k-set-contractive map with \(k=0\).
Lemma 3.4
(See Appendix E for a Proof). Assume that the conditions (H1), (H2), and (H4) hold. Then the multi-valued map \(\varphi :\overline{\Omega }_R\cap \mathbb {P}\rightarrow P_{cp,cv}(\mathbb {P})\) is an upper semi-continuous(USC) map.
Denote
where \(\mathfrak {F}_i(v,\gamma )\) is defined as above and \(\gamma _j(v)\in \overline{co}[f_j(x_j(v))]\).
(H5) There exists two positive constants \(R_0, R_1\) with \(0<R_0<R_1\), such that
(H5*) There exists two positive constants \(R_0, R_1\) with \(0<R_0<R_1\), such that
(H6) There exists four positive constants \(R_0, R_1, R_2, R_3\) with \(0<R_0<R_1<R_2<R_3\), such that
(H6*) There exists four positive constants \(R_0, R_1, R_2, R_3\) with \(0<R_0<R_1<R_2<R_3\), such that
(H7) There exists 2m positive constants \(R_0, R_1, \ldots , R_{2m-1}\) with \(0<R_0<R_1<\cdots <R_{2m}\), such that
(H7*) There exists 2m positive constants \(R_0, R_1, \ldots , R_{2m}\) with \(0<R_0<R_1<\cdots <R_{2m-1}\), such that
Theorem 3.1
Assume that the conditions (H1), (H2), (H4), and (H5) hold. Then the system (1.1) has at least one positive \(\omega \)-periodic solution.
Proof
To prove that the result of Theorem 3.1 is true, it is enough to show that \(\varphi \) has least one fixed point in \(\{x:x\in \mathbb {P}\) and \(R_0\leqslant ||x||_X\leqslant R_1\}\). In view of Lemmas 3.1–3.4, it remains to verify whether the conditions (1) and (2) of Lemma 2.1 hold. \(\square \)
First, for any \(x(t)=(x_1(t),x_2(t),\ldots ,x_n(t))^T\in \overline{\Omega }_R\cap \mathbb {P}\), \(\kappa _i|x_i|_{\infty }\leqslant x_i(t)\leqslant |x_i|_{\infty }\) and \(y(t)=(y_1(t),y_2(t),\ldots ,\) \(y_n(t))^T\in \varphi (x)\). There exists a measurable function \(\gamma =(\gamma _1,\gamma _2,\ldots ,\gamma _n)^T:[0,\mathcal {T})\rightarrow \mathbb {R}^n\) such that \(\gamma _i(t)\in \overline{co}[f_i(x_i(t))]\) with \( |\gamma _i(t)|\leqslant \max _{0\leqslant s\leqslant R}\{W_i(s)\}\ (i=1,2,\ldots ,n)\) for \(t\in [0, \mathcal {T})\) and
Then, we have
Hence, for any \(x=(x_1,x_2,\ldots ,x_n)^T\in \partial \Omega _{R_1}\cap \mathbb {P}\),
Thus, we claim that the condition (1) in Lemma 2.1 is true. Otherwise, there exists \(x^0\in \partial \Omega _{R_1}\cap \mathbb {P}\) and some constant \(\lambda _0\in [0,1)\) such that
Then there exists \(y^0\in \varphi (x^0)\) with \(x^0=\lambda _0y^0\). Therefore,
which is a contradiction. That is, the condition (1) in Lemma 2.1 is satisfied.
Next, we will prove that the condition (2) in Lemma 2.1 hold. Suppose \(\eta =(\eta _1,\eta _2,\ldots ,\eta _n)^T\in \mathbb {P}\backslash \{\theta \}\). We will show that for any \(x=(x_1,x_2,\ldots ,x_n)^T\in \partial \Omega _{R_0}\cap \mathbb {P}\) and any \(\mu >0\), such that \(x\not \in \varphi (x)+\mu \eta \). Otherwise, there exist some \(x^{00}=(x^{00}_1,x^{00}_2,\ldots ,x^{00}_n)^T\in \partial \Omega _{R_0}\cap \mathbb {P}\) and some \(\mu _{00}>0\), such that
Then there exists \(y^{00}=(y_1^{00},y_2^{00},\ldots ,y_n^{00})^T\in \varphi (x^{00})\) with \(x^{00}=y^{00}+\mu _{00}\eta \). Let \(\eta _{i_0}\ne 0\) for some \(i_0\in \{1,2,\ldots ,n\}\). Thus
Note that \(x^{00}=(x^{00}_1,x^{00}_2,\ldots ,x^{00}_n)^T\in \partial \Omega _{R_0}\cap \mathbb {P}\), then we have \(\kappa _{i_0}|x^{00}_{i_0}|_{\infty }\leqslant x^{00}_{i_0}(t)\leqslant |x_{i_0}^{00}|_{\infty }\). Since
that is
where \(\gamma _j^{00}(t)\in \overline{co}[f_j(x^{00}_j(t))]\ (j=1,2,\ldots ,n)\).
Hence,
which is a contradiction. This proves the condition (2) in Lemma 2.1 is also satisfied.
By Lemma 2.1, the system (1.1) has at least one positive \(\omega \)-periodic solution.
Applying Lemma 2.2 and similar to the proof of Theorem 3.1, we also have the following Theorem 3.2.
Theorem 3.2
Assume that the conditions (H1), (H2), (H4) and (H5*) hold. Then the system (1.1) has at least one positive \(\omega \)-periodic solution.
Remark 2
Based on fixed-point theorem of multi-valued maps due to Agarwal and O’Regan[50], we apply a new method to investigate the existence of positive periodic solutions for the neural networks (1.1) with discontinuous neuron activations and mixed delays. Compared with the corresponding results in the earlier literature [1, 2, 7, 9–18, 39–44], Theorems 3.1 and 3.2 obtained in this section are essentially new. In addition, note that the control function \(W_i(x_i)\) (see assumption (H2)) may be unbounded, may be super linear, even to be exponential. Thus, the discontinuous neuron activations \(f_i(i=1,2,\ldots ,n)\) are allowed to be unbounded, to be super linear, even to be exponential. Meanwhile, the restriction condition \(f_i^+(\rho ^i_k)>f_i^-(\rho ^i_k)\) (where \(f_i\) is discontinuous at \(\rho ^i_k\)) in the existing papers has also been eliminated successfully. Therefore, the activation functions of this paper are more general and more practical. Hence, Theorems 3.1 and 3.2 generalize and improve the corresponding results of the earlier literature [9, 10, 12, 13, 15–18, 41, 42].
Next, we discuss the multiplicity of positive \(\omega \)-periodic solutions for the neural networks (1.1) with discontinuous neuron activations.
Theorem 3.3
Assume that the conditions (H1), (H2), (H4) and (H6) hold. Then the system (1.1) has at least two positive \(\omega \)-periodic solutions.
Proof
It follows from Theorem 3.1 that \(\varphi \) has at least one fixed point in \(\{x^{(1)}:x^{(1)}\in \mathbb {P}\) and \(R_0\leqslant ||x^{(1)}||_X\leqslant R_1\}\). Meanwhile, Theorem 3.2 implies that \(\varphi \) has at least one fixed point in \(\{x^{(2)}:x^{(2)}\in \mathbb {P}\) and \(R_2\leqslant ||x^{(2)}||_X\leqslant R_3\}\). That is, \(\varphi \) has at least two fixed points in \(x^{(1)}, x^{(2)}\) \((x^{(1)}, x^{(2)}\in \mathbb {P})\) with \(R_0\leqslant ||x^{(1)}||_X\leqslant R_1<R_2\leqslant ||x^{(2)}||_X\leqslant R_3\). Thus the system (1.1) has at least two positive \(\omega \)-periodic solutions. \(\square \)
From the proof of Theorems 3.1–3.3, it is easy to obtain the following result.
Theorem 3.4
Assume that the conditions (H1), (H2), (H4) and (H6*) hold. Then the system (1.1) has at least two positive \(\omega \)-periodic solutions.
Theorem 3.5
Assume that the conditions (H1), (H2), (H4) and (H7) hold. Then the system (1.1) has at least m positive \(\omega \)-periodic solutions.
Theorem 3.6
Assume that the conditions (H1), (H2), (H4) and (H7*) hold. Then the system (1.1) has at least m positive \(\omega \)-periodic solutions.
Remark 3
In the earlier papers, such as [23, 24, 27, 28], the authors investigated the multiperiodicity for neuron networks with continuous neuron activations. However, for neuron networks with discontinuous neuron activations, there are few papers studied the multiperiodicity of it. In [29, 30], the authors studied the multiperiodicity of neuron networks with r-level discontinuous neuron activation functions. For neuron networks with more general discontinuous neuron activation functions, the methods used in [29, 30] will be invalid. Hence, to study the multiperiodicity of neuron networks with discontinuous neuron activations, a new method should be introduced. By means of functional differential inclusions theory and fixed-point theorem of multi-valued maps due to Agarwal and O’Regan [50], we obtain the existence of multiple positive periodic solutions for the neural networks with more general discontinuous neuron activations. In this sense, Theorems 3.3–3.6 are completely new.
4 Uniqueness and global exponential stability
For most practical applications, it is of prime importance to make sure that the designed neural networks are stable. By applying Theorems 3.3 and 3.4, under appropriate conditions, there exist multiple periodic solutions of system (1.1). Thus, it is interesting to obtain the uniqueness of \(\omega \)-periodic solution to the system (1.1). And so, in this section, we shall explore the uniqueness and global exponential stability of the \(\omega \)-periodic solution for the time-varying and distributed delayed Cohen–Grossberg neural networks (1.1) with discontinuous neuron activations. For convenience, we state some assumptions.
(H8) For each \(i=1,2,\ldots ,n\), \(f_i(x_i)\) is monotonically decreasing in \(\mathbb {R}\).
(H8*) For each \(i=1,2,\ldots ,n\), \(f_i(x_i)\) is monotonically nondecreasing in \(\mathbb {R}\).
(H9) The time-varying delay \(\tau (t)\) is continuously differentiable function and satisfying \(\tau ^\prime (t)<1\). Moreover, there exist positive constants \(\xi _1,\xi _2,\ldots ,\xi _n\) and \(\delta >0\) such that
and \(\varphi ^{-1}\) is the inverse function of \(\varphi =t-\tau (t)\).
(H9*) The time-varying delay \(\tau (t)\) is continuously differentiable function and satisfying \(\tau ^\prime (t)<1\). Moreover, there exist positive constants \(\xi _1,\xi _2,\ldots ,\xi _n\) and \(\delta >0\) such that
where
and \(\varphi ^{-1}\) is the inverse function of \(\varphi =t-\tau (t)\).
Theorem 4.1
Assume that the conditions (H1), (H2), (H4), (H5), (H8) and (H9) hold. Then the system (1.1) has a uniqueness positive \(\omega \)-periodic solution which is globally exponentially stable.
Proof
It follows from Theorem 3.1 that the existence of the \(\omega \)-periodic solution for the system (1.1) is obvious. Assume that \(x^*(t)=(x_1^*(t),x_2^*(t),\ldots ,x_n^*(t))^T\) is a positive \(\omega \)-periodic solution of (1.1), \(\gamma ^*(t)=(\gamma _1^*(t),\gamma _2^*(t),\ldots ,\gamma _n^*(t))^T\) \((\gamma _i^*(t)\in \overline{co}[f_i(x_i^*(t))])\) is an output solution associated with the state \(x^*(t)=(x_1^*(t),x_2^*(t),\ldots ,x_n^*(t))^T\). And that \(x(t)=(x_1(t),x_2(t),\ldots ,x_n(t))^T\) is any solution of (1.1), \(\gamma (t)=(\gamma _1(t),\gamma _2(t),\ldots ,\gamma _n(t))^T\) \((\gamma _i(t)\in \overline{co}[f_i(x_i(t))])\) is an output solution corresponding to the state \(x(t)=(x_1(t),x_2(t),\ldots ,x_n(t))^T\).
Now, we consider the following Lyapunov function as follows:
Obviously, V(t) is regular. Meanwhile, the \(\omega \)-periodic solution \(x^*(t)\) and any solution x(t) of the system (1.1) are all absolutely continuous. Then, V(t) is differential for a.e. \(t\geqslant 0\), and the time derivative can be evaluated by Lemma 2.4.
Moreover,
where \(\nu _i(t)=\hbox {sign}\{\int _{x_i^*(t)}^{x_i(t)}\dfrac{\hbox {d}\rho }{q_i(\rho )}\}=\hbox {sign}\{x_i(t)-x^*_i(t)\}\), if \(x_i(t)\ne x_i^*(t)\), while \(\nu _i(t)\) can be arbitrarily choosen in \([-1,1]\), if \(x_i(t)=x_i^*(t)\). In particular, we choose \(\nu _i(t)\) as follows
It is easy to see that
In view of the chain rule in Lemma 2.4, calculate the time derivative of V(t) along the solution trajectories of the system (1.1) in the sense of equation (2.2), then we can get
It follows from the condition (H9) that, there exists nonnegative constants \(\varsigma _i (i=1,2,\ldots ,n)\) and \(t_0\geqslant 0\) such that for \(t\geqslant t_0\), we have
Thus
where \(\Lambda _0=\min _{0\leqslant i\leqslant n}\xi _i\left( d_i^L-\dfrac{\delta }{q_i^L}\right) >0\). Notice that
Hence
where \(\xi =\min \{\xi _1,\xi _2,\ldots ,\xi _n\}>0\). Therefore, the positive \(\omega \)-periodic solution \(x^*(t)\) of the system (1.1) is globally exponentially stable. Consequently, the periodic solution \(x^*(t)\) of the system (1.1) is unique. The proof is complete. \(\square \)
From the proof of the Theorem 4.1, it is easy get the following theorems.
Theorem 4.2
Assume that the conditions (H1), (H2), (H4), (H5), (H8*) and (H9*) hold. Then the system (1.1) has a uniqueness positive \(\omega \)-periodic solution which is globally exponentially stable.
Theorem 4.3
Assume that the conditions (H1), (H2), (H4), (H5*), (H8) and (H9) hold. Then the system (1.1) has a uniqueness positive \(\omega \)-periodic solution which is globally exponentially stable.
Theorem 4.4
Assume that the conditions (H1), (H2), (H4), (H5*), (H8*) and (H9*) hold. Then the system (1.1) has a uniqueness positive \(\omega \)-periodic solution which is globally exponentially stable.
Remark 4
By construct suitable Lyapunov-like functions, we study the global exponential stability of the periodic solution for the neural network dynamic system (1.1) with discontinuous neuron activations and mixed time delayed. However, by comparison we find that Theorems 4.1–4.4 obtained in this section make the following improvements:
-
(1)
It is well known that most of the existing results concerning the delayed neural network dynamical systems with discontinuous neuron activations have not considered the time-varying delays and distributed delays situation. It is easy to see that the systems in the papers [1, 2, 6, 7, 9–18, 39, 40, 44] are just special cases of our system.
-
(2)
It is well known that, in the papers [1, 2, 6, 7, 9–18, 39, 40, 44], many results on the stability (or global exponential stability) analysis of periodic solution or equilibrium point for neural networks with discontinuous activation functions are conducted under the following assumptions:
-
For each \(i=1,2,\ldots ,n\), \(f_i(x_i)\) is monotonically non-decreasing in \(\mathbb {R}\).
-
For each \(i=1,2,\ldots ,n\), there exists a constant \(L_i\), such that for any two different numbers \(u,v\in \mathbb {R}\), \(\forall \gamma _i\in \overline{co}[f_i(u)]\), \(\forall \eta _i\in \overline{co}[f_i(v)]\),
$$\begin{aligned} \dfrac{\gamma _i-\eta _i}{u-v}\geqslant -L_i. \end{aligned}$$It is easy to see that these conditions are not required in this paper.
-
In addition, the restriction condition \(f_i^+(\rho ^i_k)>f_i^-(\rho ^i_k)\) (where \(f_i\) is discontinuous at \(\rho ^i_k\)) in the papers [1, 2, 6, 7, 9–18, 39, 40, 44] has also been eliminated successfully. Therefore, the results on global exponential stability of periodic solution in this paper are more general and more practical.
5 Numerical examples
In this section, we consider three numerical examples, with which the time-varying and distributed delayed neural networks have different discontinuous neuron activation functions, to show the effectiveness of the theoretical results given in the previous sections.
Example 5.1
Consider the following general Cohen–Grossberg neural networks:
where \(f_1(s)=f_2(s)=\left\{ {{\begin{array}{ll} 0.01, &{} \quad |s|\leqslant 2, \\ s^2+40, &{} \quad |s|>2, \end{array}}} \right. \) and \(\tau (t)\equiv 1\).

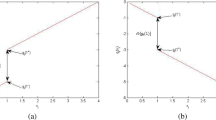
Trajectory of the system (5.1) with initial value \(x(t)=(0.111,0.115)^T, t\in [-1,0]\)

Trajectory of the system (5.2) with 5 random initial conditions
Consider the IVP of the system (5.1) with the initial condition \(\phi (s)=(0.111,0.115)^T\) for \(s\in [-1,0]\), and \(\psi (s)=(0.01,0.01)^T\) for \(s\in [-1,0]\). It is not difficult to verify that the coefficients of the system (5.1) satisfy all the conditions in Theorem 3.1. Therefore, it follows from Theorem 3.1 that the non-autonomous system (5.1) has at least one \(\pi \)-periodic solution. As shown in Figure 1, numerical simulations also confirm that there exists a \(\pi \)-periodic solution of the system (5.1) by MATLAB.
Remark 5
It is easy to see that the activation functions \(f_1(s)\) and \(f_2(s)\) of Example 5.1 are discontinuous, unbounded, non-monotonic, and satisfy the super linear growth condition(in fact, \(|f_i(s)|\leqslant s^2+40, i=1,2\)). Therefore, the results in [9, 10, 12, 13, 15–18, 41, 42] cannot be applied to discuss the existence of periodic solution for the system (5.1). Moreover, the activation functions \(f_i(s)(i=1,2)\) are discontinuous at \(s=\pm 2\) and \(f_i^-(-2)=44>0.01=f_i^+(-2)(i=1,2)\). It is obviously from this example that the assumption (H2) in this paper is much less conservative than that in [9, 10, 12, 13, 15–18, 41, 42] since the functions \(W_i(s)\) may be a class of general functions and the restriction condition \(f_i^+(\rho ^i_k)>f_i^-(\rho ^i_k)\)(where \(f_i\) is discontinuous at \(\rho ^i_k\)) in [9, 10, 16, 18, 41, 42] has also been eliminated successfully.
Example 5.2
Consider the following general Cohen–Grossberg neural networks:
where \( f_1(s)=f_2(s)=\left\{ {{\begin{array}{ll} s^2+100, &{} \quad s\leqslant 0, \\ 0.1, &{} \quad 0<s<2, \\ 0.001, &{} \quad s\geqslant 2,\end{array}}} \right. \hbox { and} \tau (t)=1\).

Trajectory of the system (5.3) with 9 random initial conditions
Consider the IVP of the system (5.2) with 5 random initial conditions \(\phi (s)=(1.5,1.5)^T\), \((1.75,1.75)^T\), \((2.0,2.0)^T\), \((2.25,2.25)^T\) and \((2.5,2.5)^T\) for \(s\in [-1,0]\). It is not difficult to verify that the coefficients of the system (5.2) satisfy all the conditions in Theorem 4.1. Therefore, it follows from Theorem 4.1 that the non-autonomous system (5.2) has a unique \(2\pi \)-periodic solution which is globally exponentially stable. As shown in Figure 2, numerical simulations also confirm that all the solutions converge to the unique \(2\pi \)-periodic solution of the system (5.2) by MATLAB.
Remark 6
It is easy to see that the activation functions \(f_1(s)\) and \(f_2(s)\) of Example 5.2 are discontinuous, unbounded, monotonic decreasing, and satisfy the super linear growth condition(in fact, \(|f_i(s)|\leqslant s^2+100, i=1,2\)). Therefore, the results in [9, 10, 12, 13, 15–18, 41, 42] cannot be applied to discuss the stability (or global exponential stability) of periodic solution for the system (5.2). Meanwhile, the activation functions \(f_i(s)(i=1,2)\) are discontinuous at \(s=2\) and \(s=0\). In addition, for \(i=1,2\), we have \(f_i^-(0)=10>0.1=f_i^+(0)\) and \(f_i^-(2)=0.1>0.01=f_i^+(2)\). Thus, the restriction condition \(f_i^+(\rho ^i_k)>f_i^-(\rho ^i_k)\)(where \(f_i\) is discontinuous at \(\rho ^i_k\)) in the papers [9, 10, 12, 13, 15–18, 41, 42] has also been eliminated successfully. Therefore, the results of this paper are more general and more practical.
Example 5.3
Consider the following general Cohen–Grossberg neural networks:
where \(f_1(s)=f_2(s)=\left\{ {{\begin{array}{ll} 0.1s^2+0.4, &{} \quad s\leqslant 0.5, \\ 0.01, &{} \quad 0.5<s<1, \\ 0.1s^2+1, &{} \quad s\geqslant 1, \end{array}}} \right. \hbox { and } \tau (t)=0.5\).
Consider the IVP of the system (5.3) with 9 random initial conditions \(\phi (s)=(0,0)^T\), \((0.25,0.25)^T\), \((0.5,0.5)^T\), \((0.75,0.75)^T\), \((1.0,1.0)^T\), \((1.25,1.25)^T\), \((1.5,1.5)^T\), \((1.75,1.75)^T\) and \((2.0,2.0)^T\) for \(s\in [-1,0]\). Take \(R_0=0.1\), \(R_1=0.5\), \(R_2=1\) and \(R_3=2\). It is not difficult to verify that the coefficients of the system (5.3) satisfy all the conditions in Theorem 3.3. Therefore, it follows from Theorem 3.3 that the non-autonomous system (5.3) has at least two positive \(2\pi \)-periodic solutions. As shown in Figure 3, numerical simulations also confirm that there exists two \(2\pi \)-periodic solutions of the system (5.3) by MATLAB.
Remark 7
It is easy to see that the activation functions \(f_1(s)\) and \(f_2(s)\) of Example 5.3 are discontinuous, unbounded, and satisfy the super linear growth condition(in fact, \(|f_i(s)|\leqslant 0.1 s^2+1, i=1,2\)). Therefore, the results in [23, 24, 27–30] cannot be applied to discuss the existence of multiple periodic solutions for the system (5.3). In addition, from Figure 3, there exist at least two stable periodic solutions. Now, another problem arising in discontinuous neural networks: the multistability of periodic solutions(or equilibria), we left it for future research.
6 Conclusion
In this paper, a class of general Cohen–Grossberg neural networks with discontinuous neuron activations and mixed delays has been investigated. Under the framework of the theory of Filippov functional differential inclusions, the existence of the global solutions is given. Based on fixed-point theorem of multi-valued analysis due to Agarwal and O’Regan, the existence of one and multiple periodic solutions for the neural network systems have been obtained. It is worthy to point out that, without assuming the boundedness or under linear growth condition of the discontinuous neuron activation functions, our results on the existence of one and multiple positive periodic solutions will also be valid. After that, in terms of non-smooth analysis theory with generalized Lyapunov approach, we have got some sufficient conditions for the global exponential stability of the neural network systems. It is interesting that, under the hypnosis of the discontinuous neuron activations to be monotonically decreasing, the results of the global exponential stability also hold. Moreover, our results extend previous works not only on time-varying and distributed delayed neural networks with continuous or even Lipschitz continuous activations, but also on time-varying and distributed delayed neural networks with discontinuous activations. Finally, we gave some numerical examples to show the applicability and effectiveness of our main results. We think it would be interesting to investigate the possibility of extending the results to more complex discontinuous neural network systems with time-varying and distributed delays, such as multistability of multiple periodic solutions, uncertain network systems and stochastic neural network systems. These issues will be the topic of our future research.
References
Forti, M., Nistri, P.: Global convergence of neural networks with discontinuous neuron activations. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 50, 1421–1435 (2003)
Forti, M., Nistri, P., Papini, D.: Global exponential stability and global convergence in finite time of delayed neural networks with infinite gain. IEEE Trans. Neural Netw. 16, 1449–1463 (2005)
Cortés, J.: Discontinuous dynamical systems. IEEE Control Syst. Mag. 28, 36–73 (2008)
Liu, X., Chen, T., Cao, J., Lu, W.: Dissipativity and quasi-synchronization for neural networks with discontinuous activations and parameter mismatches. Neural Netw. 24, 1013–1021 (2011)
Liu, X., Cao, J.: Robust state estimations for neural networks with discontinuous activations. IEEE Trans. Syst., Man, Cybern. Part B 40, 1425–1437 (2010)
Wang, Y., Zuo, Y., Huang, L., Li, C.: Global robust stability of delayed neural networks with discontinuous activation functions. IET Control Theory Appl. 2, 543–553 (2008)
Lu, W., Chen, T.: Dynamical behaviors of delayed neural networks systems with discontinuous activation functions. Neural Comput. 18, 683–708 (2006)
Hopfield, J., Tank, D.: Neurons with graded response have collective computational properties like those of two-state neurons. Proc. Nat. Acad. Sci. 79, 3088–3092 (1984)
Papini, D., Taddei, V.: Global exponential stability of the periodic solution of a delayed neural networks with discontinuous activations. Phys. Lett. A 343, 117–128 (2005)
Liu, X., Cao, J.: On periodic solutions of neural networks via differential inclusions. Neural Netw. 22, 329–334 (2009)
Cai, Z., Huang, L.: Existence and global asymptotic stability of periodic solution for discrete and distributed time-varying delayed neural networks with discontinuous activations. Neurocomputing 74, 3170–3179 (2011)
Huang, L., Guo, Z.: Global convergence of periodic solution of neural networks with discontinuous activation functions. Chaos, Solitons and Fractals 42, 2351–2356 (2009)
Huang, L., Wang, J., Zhou, X.: Existence and global asymptotic stability of periodic solutions for Hopfield neural networks with discontinuous activations. Nonlinear Anal. RWA 10, 1651–1661 (2009)
Xiao, J., Zeng, Z., Shen, W.: Global asymptotic stability of delayed neural networks with discontinuous neuron activations. Neurocomputing 118, 322–328 (2013)
Cai, Z., Huang, L., Guo, Z., Chen, X.: On the periodic dynamics of a class of time-varying delayed neural networks via differential inclusions. Neural Netw. 33, 97–113 (2012)
Wu, H.: Stability analysis for periodic solution of neural networks with discontinuous neuron activations. Nonlinear Anal. RWA 10, 1717–1729 (2009)
Wang, J., Huang, L., Guo, Z.: Global asymptotic stability of neural networks with discontinuous activations. Neural Netw. 22, 931–937 (2009)
Li, Y., Wu, H.: Global stability analysis for periodic solution in discontinuous neural networks with nonlinear growth activations. Adv. Differ. Equ. 2009, 1–4 (2009). doi:10.1155/2009/798685
Gonzalez, S.: Neural Networks for Macroeconomic Forecasting: A Complementary Approach to Linear Regression Models. Department of Finance, Canada (2000)
Cheng, C., Lin, K., Shi, C.: Multistability an convergence in delayed neural networks. Phys. D 225, 61–64 (2007)
Yi, Z., Tan, K., Lee, T.: Multistability analysis for recurrent neural networks with unsaturating piecewise linear transfer functions. Neural Comput. 15, 639–662 (2003)
Lu, W., Wang, L., Chen, T.: On attracting basins of multiple equilibria of a class of cellular neural networks. IEEE Trans. Neural Netw. 22, 381–394 (2011)
Zeng, Z., Wang, J.: Multiperiodicity and exponential attractivity evoked by periodic external inputs in delayed cellular neural networks. Neural Comput. 18, 848–870 (2006)
Cao, J., Feng, G., Wang, Y.: Multistability and multiperiodicity of delayed Cohen-Grossberg Neural networks with a general class of activation functions. Phys. D 237, 1734–1749 (2008)
Zeng, Z., Huang, T., Zheng, W.: Multistability of recurrent neural networks with time-varying delays and the piecewise linear activation function. IEEE Trans. Neural Netw. 21, 1371–1377 (2010)
Macro, M., Forti, M., Grazzini, M., Pancioni, L.: Limit set dichotomy and multistability for a class of cooperative neural networks with delays. IEEE Trans. Neural Netw. Learn. Syst. 23, 1473–1485 (2012)
Zhou, T., Wang, M., Long, M.: Existence and exponential stability of multiple periodic solutions for a multidirectional associative memory neural network. Neural Process Lett. 35, 187–202 (2012)
Nie, X., Huang, Z.: Multistability and multiperiodicity of high-order competitive neural networks with a general class of activation functions. Neurocomputing 82, 1–13 (2012)
Huang, Y., Zhang, H., Wang, Z.: Multistability and multiperiodicity of delayed bidirectional associative memory networks with discontinuous activation functions. Appl. Math. Comput. 219, 899–910 (2012)
Huang, Y., Zhang, H., Wang, Z.: Dynamical stability analysis of multiple equilibrium points in time-varying delayed recurrent neural networks with discontinuous activation functions. Neurocomputing 91, 21–28 (2012)
Hou, C., Qian, J.: Stability analysis for neural dynamics with time-varying delays. IEEE Trans. Neural Netw. 9, 221–223 (2008)
Huang, H., Ho, D., Lam, J.: Stochastic stability analysis of fuzzy Hopfield neural networks with time-varying delays. IEEE Trans. Circuits Syst. II(52), 251–255 (2005)
Gopalsamy, K., He, X.: Delay-independent stability in bidirectional associative memory network. IEEE Trans. Neural Netw. 5, 998–1002 (1994)
Zheng, C., Gong, C., Wang, Z.: Stability criteria for Cohen-Grossberg neural networks with mixed delays and inverse Lipschitz neuron activations. J. Frankl. Inst. 349, 2903–2924 (2012)
Cohen, M., Grossberg, S.: Absolute stability and global pattern formation and parallel memory storage by competitive neural networks. IEEE Trans. Syst. Man Cybern. 13, 815–826 (1983)
Balasubramaniam, P., Vembarasan, V.: Robust stability of uncertain fuzzy BAM neural networks of neutral-type with Markovian jumping parameters and impulses. Comput. Math. Appl. 62, 1838–1861 (2011)
Balasubramaniam, P., Vembarasan, V.: Asymptotic stability of BAM neural networks of neutral-type with impulsive effects and time delay in the leakage term. Int. J. Comput. Math. 88, 3271–3291 (2011)
Sathy, R., Balasubramaniam, P.: Stability analysis of fuzzy Markovian jumping Cohen–Grossberg BAM neural networks with mixed time-varying delays. Commun. Nonlinear Sci. Numer. Simul. 16, 2054–2064 (2011)
Lu, W., Chen, T.: Dynamical behaviors of Cohen–Grossberg neural networks with discontinuous activation functions. Neural Netw. 18, 231–242 (2005)
Meng, Y., Huang, L., Guo, Z., Hu, Q.: Stability analysis of Cohen–Grossberg neural networks with discontinuous neuron activations. Appl. Math. Model. 34, 358–365 (2010)
He, X., Lu, W., Chen, T.: Nonnegative periodic dynamics of delayed Cohen–Grossberg neural networks with discontinuous activations. Neurocomputing 73, 2765–2772 (2010)
Wang, D., Huang, L., Cai, Z.: On the periodic dynamics of a general Cohen–Grossberg BAM neural networks via differential inclusions. Neurocomputing 118, 203–214 (2013)
Wang, D., Huang, L.: Periodicity and global exponential stability of generalized Cohen–Grossberg neural networks with discontinuous activations and mixed delays. Neural Netw. 51, 80–95 (2014)
Chen, X., Song, Q.: Global exponential stability of the periodic solution of delayed Cohen–Grossberg neural networks with discontinuous activations. Neurocomputing 73, 3097–3104 (2010)
Wang, D., Huang, L.: Almost periodic dynamical behaviors for generalized Cohen–Grossberg neural networks with discontinuous activations via differential inclusions. Commun. Nonlinear Sci. Numer. Simul. 19, 3857–3879 (2014)
Filippov, A.: Differential Equations with Discontinuous Right-hand Side. Mathematics and Its Applications (Soviet Series). Kluwer Academic, Boston (1988)
Huang, L., Guo, Z., Wang, J.: Theory and Applications of Differential Equations with Discontinuous Right-Hand Sides. Science Press, Beijing (2011). (In Chinese)
Aubin, J., Cellina, A.: Differential Inclusions. Springer, Berlin (1984)
Aubin, J., Frankowska, H.: Set-Valued Analysis. Birkhauser, Boston (1990)
Agarwal, R., O’Regan, D.: A note on the existence of multiple fixed points for multivalued maps with applications. J. Differ. Equ. 160, 389–403 (2000)
Hong, S.: Multiple positive solutions for a class of integral inclusions. J. Comput. Appl. Math. 214, 19–29 (2008)
Benchohra, M., Hamani, S., Henderson, J.: Functional differential inclusions with integral boundary conditions. Electron. J. Qual. Theory Differ. Equ. 15, 1–13 (2007)
Zecca, P., Zezza, P.: Nonlinear boundary value problems in Banach spaces for multivalued differential equations in noncompact intervals. Nonlinear Anal. 3, 347–352 (1979)
Balasubramaniam, P., Ntouyas, S.: Controllability for neutral stochastic functional differential inclusions with infinite delay in abstract space. J. Math. Anal. Appl. 324, 161–176 (2006)
Xue, X., Yu, J.: Periodic solutions for semi-linear evolution inclusions. J. Math. Anal. Appl. 331, 1246–1262 (2007)
Clarke, F.: Optimization and Nonsmooth Analysis. Wiley, New York (1983)
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was jointly supported by the National Natural Science Foundation of China (11371127, 11401228, 11501221, 61573004), the Natural Science Foundation of Fujian Province (2015J01584), the Promotion Program for Young and Middle-aged Teacher in Science and Technology Research of Huaqiao University (ZQN-PY201, ZQN-YX301).
Appendix
Appendix
1.1 Appendix A. Proof of Proposition 2.1
Proof
It is easy to see that the multi-valued map
where
is upper semi-continuous with non-empty compact convex values, the local existence of a solution \(x(t)=(x_1(t),x_2(t),\ldots ,x_n(t))^T\) of (2.2) can be guaranteed [46, 47]. That is, the IVP of system (2.2) has at least a solution \(x(t)=(x_1(t),x_2(t),\ldots ,x_n(t))^T\) on \([0,\mathcal {T})\) for some \(\mathcal {T}\in (0,+\infty ]\) and the derivative of x(t) is a measurable selection from \(Q(x(t))\mathcal {F}(t,f)\). For a real matrix \(\Lambda =(\lambda _{ij})_{m\times n}\), denote \(||\Lambda ||_{\mathcal {M}}=\max _{1\leqslant i\leqslant n}\sum _{j=1}^m|\lambda _{ij}|\). From the Continuation Theorem (Theorem 2, P78, [46]), we have that either \(\mathcal {T}=+\infty \), or \(\mathcal {T}<+\infty \) and \(\lim _{t\rightarrow T^{-}}||x(t)||_{\mathcal {M}}=+\infty \). In the following, we will prove that \(\lim _{t\rightarrow T^{-}}||x(t)||_{\mathcal {M}}<+\infty \) if \(\mathcal {T}<+\infty \), which means that the maximal existing interval of x(t) can be extended to \(+\infty \).
First, we’ll show that x(t) is uniformly bounded about \(t\in [0,\mathcal {T})\).
Let \(r_0=||x(0)||_{\mathcal {M}}\), \(r_s=\max _{0\leqslant t\leqslant s}||x(t)||_{\mathcal {M}}\). And the interval \([r_0, r_s]\) can be divided as follows
Denote \(t_l^*=\min \{t\in [0,s]\mid ||x(t)||_{\mathcal {M}}=r_l\}, l=0,1,2,\ldots ,m;\) and \(t_l^{**}=\max \{t\in [0,t_{l+1}^*]\mid ||x(t)||_{\mathcal {M}}=r_l\}, l=0,1,2,\ldots ,m-1.\) Note that \(||x(t)||_{\mathcal {M}}\) is a continuous function, we have
and
Thus, we have
Since x(t) is a solution of the differential inclusions (2.2) with the initial condition \([\phi ,\psi ]\), we can obtain
where
and \(q^M=\max _{1\leqslant i\leqslant n}\{q_i^M\}\), \(||\psi ||_{\mathcal {M},\infty }=\max _{1{\leqslant } i{\leqslant } n}\{||\psi _i||_{\infty }\}{=}\max _{1{\leqslant } i{\leqslant } n}\{\hbox {ess}\sup _{s\in ({-}\infty ,0]}|\psi _i(s)|\}\).
It follows from (7.1) and (7.2) that
where \(||x(\eta _l)||_{\mathcal {M}}+W(||x(\eta _l)||_{\mathcal {M}})=\max _{t\in [t_l^{**},t_{l+1}^*]}\{||x(t)||_{\mathcal {M}}+W(||x(t)||_{\mathcal {M}})\}\). From (7.3), we have
Summing on both sides of (7.4) from 0 to \(m-1\) with respect to l, we can derive
Since the division of segment \([r_0,r_s]\) is arbitrary, and from the definition of integration, we have
which, together with the condition (H3) imply that \(r_s\) is uniformly bounded about \(s\in [0,\mathcal {T})\). Hence, x(t) is uniformly bounded about \(t\in [0,\mathcal {T})\).
Next, we will show that \(\lim _{t\rightarrow T^-}||x(t)||_{\mathcal {M}}<+\infty \). There exists \(M_2\,{>}\,0\), such that \(||x(t)||_{\mathcal {M}}\leqslant M_2\), \(\forall t\in [0,\mathcal {T})\), since x(t) is uniformly bounded about \(t\in [0,\mathcal {T})\). For \(0\leqslant t_1<t_2<\mathcal {T}\), we have
which implies that \(\lim _{t\rightarrow T^-}x(t)\) exist, i.e., \(\lim _{t\rightarrow T^-}||x(t)||_{\mathcal {M}}<+\infty \). The proof is completed. \(\square \)
1.2 Appendix B. Proof of Lemma 3.1
Suppose that \(x(t)=(x_1(t),x_2(t),\ldots ,x_n(t))^T\) is a \(\omega \)-periodic solution of system (1.1) in the sense of Filippov, in view of Definition 2.1, we can obtain from (2.2) that
Thus
Note that the periodicity of x(t), by integrating both sides of differential inclusion (7.5) over the interval \([t, t+\omega ](0\leqslant t\leqslant \omega )\), we get the following integral inclusions
That is, x(t) is a \(\omega \)-periodic solution of integral inclusions (3.1).
On the other hand, suppose that x(t) is a \(\omega \)-periodic solution of integral inclusions (3.1). By the integral representation theorem [48], there exist a measurable function \(\gamma =(\gamma _1,\gamma _2,\ldots ,\gamma _n)^T:[0,\mathcal {T})\rightarrow \mathbb {R}^n\) such that \(\gamma _i(t)\in \overline{co}[f_i(x_i(t))]\) for a.e. \(t\in [0, \mathcal {T})\) and
Since the right-hand sides of (7.6) is absolutely continuous, deviating the two sides of (7.6) about t, for a.e. \(t\in [0, \mathcal {T})\), we obtain
Note that the periodicity of x(t) and \(\gamma (t)\), we have
In view of Definition 2.1, we know that \(x(t)=(x_1(t),x_2(t),\ldots ,x_n(t))^T\) is a \(\omega \)-periodic solution of system (1.1) in the sense of Filippov.
The proof of Lemma 3.1 is completed.
1.3 Appendix C. Proof of Lemma 3.2
First, for any \(x(t)=(x_1(t),x_2(t),\ldots ,x_n(t))^T\in \overline{\Omega }_R\cap \mathbb {P}\) and \(y(t)=(y_1(t),y_2(t),\ldots ,y_n(t))^T\in \varphi (x)\). There exists a measurable function \(\gamma =(\gamma _1,\gamma _2,\ldots ,\gamma _n)^T:[0,\mathcal {T})\rightarrow \mathbb {R}^n\) such that \(\gamma _i(t)\in \overline{co}[f_i(x_i(t))]\) with \( |\gamma _i(t)|\leqslant \max _{0\leqslant s\leqslant R}\{W_i(s)\} (i=1,2,\ldots ,n)\) for a.e. \(t\in [0, \mathcal {T})\) and
Thus, for \(t\leqslant v\leqslant t+\omega \) and \(x\in \overline{\Omega }_R\cap \mathbb {P}\), we have
which implies
From (7.7), for \(t\leqslant v\leqslant t+\omega \) and \(x\in \overline{\Omega }_R\cap \mathbb {P}\), we also have
Therefore, for any \(x\in \overline{\Omega }_R\cap \mathbb {P}\) and \(y\in \varphi (x)\), we have \(y\in \mathbb {P}\). That is, \(\varphi (x)\in \mathbb {P}\) for every fixed \(x\in \mathbb {P}\), i.e., \(\varphi :\overline{\Omega }_R\cap \mathbb {P}\rightarrow \mathbb {P}\).
Next, we prove that \(\varphi (x)\) is convex for each \(x\in \overline{\Omega }_R\cap \mathbb {P}\). In fact, for any \(x=(x_1,x_2,\ldots ,x_n)^T\), if \(y=(y_1,y_2,\ldots ,y_n)^T, z=(z_1,z_2,\ldots ,z_n)^T\in \varphi (x)\), then there exist \(\gamma =(\gamma _1,\gamma _2,\ldots ,\gamma _n)^T:[0,\mathcal {T})\rightarrow \mathbb {R}^n\) and \(\eta =(\eta _1,\eta _2,\ldots ,\eta _n)^T:[0,\mathcal {T})\rightarrow \mathbb {R}^n\) with \(\gamma _i(t)\in \overline{co}[f_i(x_i(t))]\) and \(\eta _i(t)\in \overline{co}[f_i(x_i(t))]\) for a.e. \(t\in [0,\mathcal { T})\), such that for each \(t\in [0,\mathcal { T})\) we have
and
Let \(0\leqslant \alpha \leqslant 1\). Then for each \(t\in [0,\omega ]\) we have
that is
Hence,
Finally, it is easy to see that \(\varphi (x)\) is closed. The proof of Lemma 3.2 is completed.
1.4 Appendix D. Proof of Lemma 3.3
It is enough to show that \(\varphi :\overline{\Omega }_R\cap \mathbb {P}\rightarrow P_{kc}(\mathbb {P})\) is a compact map. According to the Ascoli-Arzela Theorem, it suffices to show that \(\varphi (\overline{\Omega }_R\cap \mathbb {P})\) is an uniformly bounded and equi-continuous set. For any \(x=(x_1,x_2,\ldots ,x_n)^T\in \overline{\Omega }_R\cap \mathbb {P}\) and \(y=(y_1,y_2,\ldots ,y_n)^T\in \varphi (x)\). There exists a measurable function \(\gamma =(\gamma _1,\gamma _2,\ldots ,\gamma _n)^T:[0,\mathcal {T})\rightarrow \mathbb {R}^n\) such that \(\gamma _i(t)\in \overline{co}[f_i(x_i(t))]\) with \( |\gamma _i(t)|\leqslant \max _{0\leqslant s\leqslant R}\{W_i(s)\}\ (i=1,2,\ldots ,n)\) for a.e. \(t\in [0, \mathcal {T})\) and
Hence
where \(||\psi ||_{\infty }=\hbox {ess}\sup _{s\in (-\infty ,0]}|\psi (s)|\). Which yields
Thus, \(\varphi (\overline{\Omega }_R\cap \mathbb {P})\) is an uniformly bounded set for all \(x\in \overline{\Omega }_R\cap \mathbb {P}\).
Let \(t_1, t_2\in [0,\omega ]\), then for any \(x\in \overline{\Omega }_R\cap \mathbb {P}\) and each \(i=1,2, \ldots ,n\), we have

According to the mean value theorem of derivations, we obtain
where \(0<\lambda <1\). And
Hence
where \(M_i=G_iq_i^M(q_i^Md_i^M+2)[\sum _{j=1}^n(a_{ij}^M+b_{ij}^M+c_{ij}^M)(\max _{0\leqslant s\leqslant R}\{W_i(s)\}+||\psi ||_{\infty })+I_i^M]\).
As a result we have that
Hence, \(\varphi (\overline{\Omega }_R\cap \mathbb {P})\) is an equi-continuous set in X.
Therefore, the multi-valued map \(\varphi :\overline{\Omega }_R\cap \mathbb {P}\rightarrow P_{cp,cv}(\mathbb {P})\) is a k-set-contractive map with \(k=0\).
1.5 Appendix E. Proof of Lemma 3.4
We will show that \(\varphi \) has closed graph. Denote
Let \(|||\digamma (t,x)|||=\sup \{|u|: u\in \digamma (t,x)\}\) and \(L^1([0,\omega ],\mathbb {R}^n)\) be the Banach space of all functions \(u=(u_1,u_2,\ldots ,u_n)^T:[0,\omega ]\rightarrow \mathbb {R}^n\) which are Lebesgue integrable. Define the multi-valued operator
by letting
It is easy to show that \(\digamma (t,x)\) is a \(L^1\)-Carathéodory map and the set F(x) is non-empty for each fixed \(x\in \overline{\Omega }_R\cap \mathbb {P}\).
Consider the linear continuous operator \(\mathfrak {L}: L^1([0,\omega ], \mathbb {R}^n)\rightarrow C([0,\omega ], \mathbb {R}^n)\),
Hence, it follows from Lemma 2.3 that \(\varphi =\mathfrak {L}\circ F\) is a closed graph operator. We should be point out that USC is equivalent to the condition of being a closed graph multi-valued map when the map has non-empty compact values, that is to say, we have shown that \(\varphi \) is USC.
Rights and permissions
About this article

Cite this article
Wang, D., Huang, L. Periodicity and multi-periodicity of generalized Cohen–Grossberg neural networks via functional differential inclusions. Nonlinear Dyn 85, 67–86 (2016). https://doi.org/10.1007/s11071-016-2667-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-2667-7