
Abstract
This work proposes a three-wave method with a perturbation parameter to obtain exact multi-soliton solutions of nonlinear evolution equation. The (\(2+1\))-dimensional KdV equation is used as an example to illustrate the effectiveness of the suggested method. Using this method, new multi-soliton solutions are given. Specially, spatiotemporal dynamics of breather two-soliton and multi-soliton including deformation between bright and dark multi-soliton each other, and deflection with different directions and angles are investigated and exhibited to (\(2+1\))D KdV equation. Some new nonlinear phenomena are revealed under the small perturbation of parameter.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Since the soliton concept was introduced by Zabusky and Kruskal in 1965 [1], a great number of integrable systems have been discovered in the natural and applied sciences [2–11]. Integrable systems exhibit richness and variety of exact solutions such as soliton solutions, periodic solutions, rational solutions and complexiton solutions (see, e.g., [12, 13]).
In recent years, abundant localized structures, like dromions, lumps, ring soliton and oscillated dromion, breathers solution, fractal-dromion and fractal-lump soliton structures [14], were revealed. Besides the usual localized structures, some new localized excitations like peakons, compactons, folded solitary waves and foldon structures were found by choosing some types of lower-dimensional appropriate functions [15–28]. The interaction properties of peakon–peakon, dromion–dromion and foldon–foldon interactions have also investigated [16, 17]. However, within our knowledge, studying the spatiotemporal deformation of multi-soliton such as breather two-soliton and three-soliton under the small perturbation of parameter is still open. Motivated by this reason, we investigate the (2 + 1)D KdV equation
Equation (1) was derived by Boiti et al. using the idea of the weak Lax pair. The Painlevé property of it has been proved by Dorizzi et al. And Lie algebraic structure and the infinite-dimensional symmetries have been studied. Some special forms of solitary wave solutions are also reported [26–44].
2 Three-wave method with a perturbation parameter
Multi-wave solutions are important because they reveal the interactions between the inner waves and the various frequency and velocity components. The whole multi-wave solution, for instance, may sometimes be converted into a single soliton of very high energy that propagates over large regions of space without dispersing, and an extremely destructive wave is therefore produced of which the tsunami is a good example. Since all double-wave solutions can be found by using the exp-function method proposed by Fu and Dai [18], we propose an modification of the three-soliton method [6] in this paper (called the three-wave method) for finding coupled wave solutions. Consider a high-dimensional nonlinear evolution equation in the general form
where \(u=u(x,y,z,t)\) and F is a polynomial of u and its derivatives, t represents time variable, and x, y, z represent spatial variables. The three-wave method operates as follows:
Step 1: By Painleve analysis , a transformation
is made for some new and unknown function f.
Step 2: Convert Eq. (3) into Hirota bilinear form:
where the operator D is the Hirota bilinear operator defined in [2]. The perturbation parameter \(u_0\) plays an important role to the resulting solution, where the spatiotemporal feature in multi-wave propagation including nature of soliton, direction even the shape will change as \(u_0\) makes a small perturbation.
Step 3: Traditionally, we take the following Ansátz to obtain the three-soliton solution
cc where
Here, \(a_{12},a_{13},a_{23}\) and \(a_{123}\) are real constants to be determined. Equation (6) can be rewritten as
where
Thus, this three-soliton Ansátz contains four wave variables \(\eta _1,\eta _2,\eta _3\) and \(\eta _4\). Here, we treat it in a different way. We factor out the \(e^{\frac{\eta _1}{2}}\) and decrease the numbers of wave variables to three terms. On the other hand, we set some parameters in a complex way. At last, the above analysis allows us to construct the following assumptions:
or
where \( \delta _j,j=1,2,3\) are constants. In fact, from Eqs. (9) or (10), it is easily seen that it only contains three wave variables. As a result, we call this method “three-wave method.” it is obvious that three-wave method is the reduction and modification of the traditional three-soliton method.
Step 4: Substitute Eq. (9) [or Eq. (10)] in Eq. (5) and collect the coefficients of \(e^{j\xi _1},\sin (\xi _2),\cos (\xi _2),\cosh (\xi _3)\) and \(\sinh (\xi _3)\). Then, equate the coefficients of these terms to zero and obtain a set of over-determined algebraic equations in \(a_i,b_i,c_i\) and \(d_i\)
Step 5: Solve the set of algebraic equations in Step 4 using Maple and solve for \(a_i,b_i,c_i\) and \(\delta _i, i=1,2,3\).
Step 6: Substituting the identified values in Eqs. (4) and (5). Thus, we can deduce the exact multi-wave solutions depended on the parameter for Eq. (3).
Step 7: Make a small perturbation of parameter at the special value to investigate the different spatiotemporal features of multi-wave.
2.1 Application to (2 + 1)-dimensional KdV eqution
Using Painlevé analysis, we assume
where both \(u_0\) and \(v_0\) are parameters. Then, Eqs. (1) and (2) can be equivalently transformed into the following bilinear form
According to the three-wave method with a perturbation parameter in the previous section, we can assume
for some constants \(a_i,k_i,l_i,c_i(i=1,2,3)\) to be determined later. Then, by substituting Eq. (13) in Eq. (12) and equating all the coefficients of \(\sin (\xi _i),\cos (\xi _i),\sinh (\xi _i)\) and \(\cosh (\xi _i)\) to be zero, we obtain the set of algebraic equations as follows:
By solving the above system with the aid of Maple, we obtain
where \(k_1,k_3,u_0\) and \(v_0\) are free parameters. Substituting Eq. (14) in Eq. (11), we can derive the explicit soluion of (2 + 1)-dimensional KdV equation:
where
and the coefficients are determined by
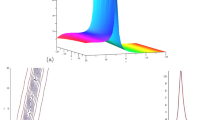
We note that Eq. (12) is just the bilinear equation of Eqs. (1) and (2) under transformation of Eq. (11) when \((u_0,v_0)\) equals to (0, 0), and the transformation (11) is linear respect to \((u_0,v_0)\), so, Eq. (12) is equivalent to the bilinear equation of original equation. Therefore, by studying the variety of spatiotemporal structure of multi-wave of Eq. (12) we can find out some novel nonlinear phenomenon of (2 + 1)D KdV equation when \(u_0\) and \(v_0\) take different values in the neighborhood of (0, 0). Figure (1) shows spatial structure of u(x, y, t) for parameters \(l_{{1}}=0,k_{{2}}=0,k_{{1}}= 0.25,k_{{3}}= 0.5,v_{{0}}=- 0.015,u_{{0}}= 0.1,a_{{3}}=1,t=2\) and \( l_{{1}}=0,k_{{2}}=0,k_{{1}}= 0.25,k_{{3}}= 0.5,v_{{0}}=- 0.015,a_{{3}}=1,t=2,u_{{0}}=- 0.1\).
From Fig. 1, we easily find out the spatiotemporal structures of breather two-soliton happen outstanding change when \((u_0,v_0)\) makes small perturbation at (0, 0), two bright solitons not only change into two dark solitons, but also the shape changes and direction of propagation obviously deflects when \(v_0\) is fixed at a small negative value \(-0.015\) and \(u_0\) are taken \(-0.1\) and 0.1, respectively.

A spatial structure of u in (15) for parameters \( l_{{1}}=0,k_{{2}}=0,k_{{1}}= 0.25, k_{{3}}= 0.5, a_{{3}}=1, t=2,\) a \(u_0=0.1\) and \(v_0=-0.015\), b \(u_0=-0.1\) and \(v_0=-0.015\)
In Eq. (14), when \(k_1>k_3\), we obtain three-soliton solution
where
and
Figure 2 exhibits the change in spatiotemporal structure of three solitons when \(v_0\) is fixed at the positive value and \(u_0\) is taken \(-0.1\) and 0.1, respectively. From Fig. 2, we obviously see that the three solitons, i.e., two bright and one dark solitons, not only change into two dark and one bright solitons respectively, but also the propagation direction happens outstanding deflexion of different angles.

A spatial structure of u in (18) for parameters \( l_{{1}}=0, k_{{2}}=0. a_{{3}}=1, t=2, k_{{3}}=1, k_{{1}}=\sqrt{2}\). a \(u_{{0}}=- 0.1\) and \(v_{{0}}=2\), b \(v_0=2, u_0=0.1\)
3 Conclusions
In conclusion, using three-wave method with a perturbation parameter, we obtain novel solutions of (2 + 1) KdV equation. We found that the perturbation parameter \(u_0\) plays an important role to the resulting solution, where the spatiotemporal deformation in multi-wave propagation including change between bright and dark multi-soliton each other, deflection with different directions and angles of multi-soliton even the shape will vary as \(u_0\) makes small perturbation in the neighborhood of \( u_0=0 \). These solutions possess many interesting dynamical features as can be seen in the previous sections. Whether there exist other methods to study spatiotemporal variance of multi-wave for other types of high-dimensional system is our future work.
References
Zabusky, N.J., Kruskal, M.D.: Interaction of solitons in a collisionaless plasma and the recurrence of initial states. Phys. Rev. Lett. 15, 240–243 (1965)
Ablowitz, M.J., Clarkson, P.A.: Solitons, nonlinear evolution equations and inverse scattering, vol. 149. Cambridge University Press, Cambridge (1999)
Weiss, J., Tabor, M., Carnevale, G.: The Painlevé property for partial differential equation. J. Math. Phys. 24, 522 (1983)
Pogrebkov, A.K.: On the formulation of the Painlevé test as a criterion of complete integrability of partial differential equation. Inverse Probl. 5(1), L7–L10 (1989)
Weiss, J.: The Painlevé property for partial differential equations, II: Bäcklund transformation, Lax pairs, and the Schwarzian derivative. J. Math. Phys. 24, 1405 (1983)
Steeb, W.H., Kloke, M., Spieker, B.M.: Liouville equation, Painlevé property and Bäcklund transformation. Z. Naturforsch. A 38, 1054–1055 (1983)
Weiss, J.: The sine-Gordon equations: complete and partial integrability. J. Math. Phys. 25, 2226 (1984)
Musette, M., Conte, R.: Algorithmic method for deriving Lax pairs from the invariant Painlevé analysis of nonlinear partial differential equations. J. Math. Phys. 32, 1450–1457 (1991)
Lou, S.Y.: Searching for higher dimensional integrable models from lower ones via Painlevé analysis. Phys. Rev. Lett. 80, 5027 (1998)
Ma, W.X., Huang, T.W., Zhang, Y.: A multiple exp-function method for nonlinear differential equations and its application. Phys. Scr. 82, 065003 (2010)
Ma, W.X., Fan, E.G.: Linear superposition principle applying to Hirota bilinear equations. Comput. Math. Appl. 61, 950–959 (2011)
Ma, W.X.: Complexiton solutions to the Korteweg–de Vries equation. Phys. Lett. A 301, 35–44 (2002)
Ma, W.X., You, Y.: Solving the Korteweg–de Vries equation by its bilinear form: Wronskian solutions. Trans. Am. Math. Soc. 357, 1753–1778 (2005)
Qin, Z.Y.: On periodic wave solution and asymptotic property of KdV–Sawada–Kotera equation. J. Phys. Soc. Jpn. B 76, 124004 (2007)
Tang, X.Y., Lou, S.Y., Zhang, Y.: Localized excitations in (2 + 1)-dimensional systems. Phys. Rev. E 66, 046601 (2002)
Meng, J.P., Zhang, J.F.: Nonpropagating solitary waves in (2 + 1)-dimensional nonlinear systems. Commun. Theor. Phys. 43, 831–836 (2005)
Zheng, C.L., Fang, J.P., Chen, L.Q.: New variable separation excitations of (2 + 1)-dimensional dispersive long-water wave system obtained by an extended mapping approach. Chaos Solitons Fractals 23, 1741–1748 (2005)
Fu, H.M., Dai, Z.D.: Double exp-function method and application. Int. J. Nonlinear Sci. Numer. Simul. 10(7), 927–934 (2009)
Lou, S.Y.: Symmetries and algebras of the integrable dispersive long wave equations in (2 + 1)-dimensional spaces. J. Phys. A Math. 27, 3235 (1994)
Wang, J.W., Li, H.X., Wu, H.N.: Distributed proportional plus second-order spatial derivative control for distributed parameter systems subject to spatiotemporal uncertainties. Nonlinear Dyn. 76(4), 2041–2058 (2014)
Jiang, Y., Tian, B., Liu, W.J.: Solitons, Bäcklund transformation and Lax pair for the (2 + 1)-dimensional Boiti–Leon–Pempinelli equation for the water waves. J. Math. Phys. 51(9), 093519–093519-11 (2010)
Liu, W.J., Lei, M.: Types of coefficient constraints of coupled nonlinear Schrödinger equations for elastic and inelastic interactions between spatial solitons with symbolic computation. Nonlinear Dyn. 76(4), 1935–1941 (2014)
Peng, Y.Z., Krishnan, E.V.: The singular manifold method and exact periodic wave solutions to a restricted BLP dispersive long wave system. Rep. Math. Phys. 56(3), 367–378 (2005)
Rosenau, P.: Nonlinear dispersion and compact structures. Phys. Rev. Lett. 73, 1737–1741 (1994)
Garagash, T.I.: Modification of the Painlevé test for systems of nonlinear partial differential equations. Theor. Math. Phys. 100, 1075 (1994)
Boiti, M., Leon, J.P., Manna, M., Pempinelli, F.: On the spectral transform of a Korteweg–de Vries equation in two spatial dimensions. Inverse Probl. 2, 271–279 (1986)
Dorizzi, B., Grammaticos, B., Ramani, A., Winternitz, P.: Are all the equations of the Kadomtsev–Petviashvili hierarchy integrable? J. Math. Phys. 27, 2848 (1986)
Tamizhmani, K.M., Punithavathi, P.: The infinite-dimensional lie algebraic structure and the symmetry reduction of a nonlinear higher-dimensional equation. J. Phys. Soc. Jpn. 59, 843–847 (1990)
Peng, Y.Z.: New Bäcklund transformation and new exact solutions to (2 + 1)-dimensional KdV equation. Commun. Theor. Phys. (Beijing, China) 40, 257–258 (2003)
Zhang, H., Ma, W.X.: Extended transformed rational function method and applications to complexiton solutions. Appl. Math. Comput. 230, 509–515 (2014)
Xu, Z., Chen, H., Jiang, M., Dai, Z., Chen, W.: Resonance and deflection of multi-soliton to the (2 + 1)-dimensional Kadomtsev–Petviashvili equation. Nonlinear Dyn. 78(1), 461–466 (2014)
Mirzazadeh, M., Eslami, M., Biswas, A.: 1-Soliton solution of KdV6 equation. Nonlinear Dyn. 80, 387–396 (2015)
Razborova, P., Triki, H., Biswas, A.: Perturbation of dispersive shallow water waves. Ocean Eng. 63, 1–7 (2013)
Razborova, P., Kara, A.H., Biswas, A.: Additional conservation laws for Rosenau–KdV–RLW equation with power law nonlinearity by Lie symmetry. Nonlinear Dyn. 79(1), 743–748 (2015)
Biswas, A.: Solitary wave solution for KdV equation with power law nonlinearity and time-dependent coefficients. Nonlinear Dyn. 58, 345–348 (2009)
Bhrawy, A.H., Abdelkawy, M.A., Biswas, A.: Cnoidal and snoidal wave solutions to coupled nonlinear wave equations by the extended Jacobi’s elliptic function method. Commun. Nonlinear Sci. Numer. Simul. 18, 915–925 (2013)
Bhrawy, A.H., Biswas, A., Javidi, M., Ma, W.X., Pinar, Z., Yildirim, A.: New solutions for (1 + 1)-dimensional Kaup–Kuperschmidt equations. Results Math. 63, 675–686 (2013)
Bhrawy, A.H., Abdelkawy, M.A., Kumar, S., Johnson, S., Biswas, A.: Solitons and other solutions to quantum Zakharov–Kuznetsov equation in quantum magneto-plasmas. Indian J. Phys. 87, 455–463 (2013)
Bhrawy, A.H., Abdelkawy, M.A., Kumar, S., Biswas, A.: Solitons and other solutions to Kadomtsev–Petviashvili equation of B-type. Rom. J. Phys. 58, 729–748 (2013)
Ebadi, G., Fard, N.Y., Bhrawy, A.H., Kumar, S., Triki, H., Yildirim, A., Biswas, A.: Solitons and other solutions to the (3 + 1)-dimensional extended Kadomtsev–Petviashvili equation with power law nonlinearity. Rom. Rep. Phys. 65, 27–62 (2013)
Biswas, A., Bhrawy, A.H., Abdelkawy, M.A., Alshaery, A.A., Hilal, E.M.: Symbolic computation of some nonlinear fractional differential equations. Rom. J. Phys. 59, 433–442 (2014)
Triki, H., Kara, A.H., Bhrawy, A., Biswas, A.: Soliton solution and conservation law of Gear–Grimshaw model for shallow water waves. Acta Phys. Pol. A 125, 1099–1106 (2014)
Triki, H., Mirzazadeh, M., Bhrawy, A.H., Razborova, P., Biswas, A.: Soliton and other solutions to long-wave short wave interaction equation. Rom. J. Phys. 60, 72–86 (2015)
Bhrawy, A.H., Abdelkawy, M.A., Biswas, A.: Topological solitons and cnoidal waves to a few nonlinear wave equations in theoretical physics. Indian J. Phys. 87, 1125–1131 (2013)
Acknowledgments
The work was supported in part by the State Administration of Foreign Experts Affairs of China, the National Natural Science Foundation of China (No. 10801037, No.11361048), the New Teacher Grant of Ministry of Education of China (No.20080246), the Young Teachers Foundation (No. 1411018) of Fudan university and Qujin Normal University NSF Grant ( No.2010QN018).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Liu, J., Mu, G., Dai, Z. et al. Spatiotemporal deformation of multi-soliton to (2 + 1)-dimensional KdV equation. Nonlinear Dyn 83, 355–360 (2016). https://doi.org/10.1007/s11071-015-2332-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-015-2332-6