
Abstract
With symbolic computation and Hirota method, analytic two-soliton solutions for the coupled nonlinear Schrödinger (CNLS) equations, which describe the propagation of spatial solitons in an AlGaAs slab waveguide, are derived. Two types of coefficient constraints of the CNLS equations to distinguish the elastic and inelastic interactions between spatial solitons are obtained for the first time in this paper. Asymptotic analysis is made to investigate the spatial soliton interactions. The inelastic interactions are studied under the obtained coefficient constraints of the CNLS equations. The influences of parameters for the obtained soliton solutions are discussed. All-optical switching and soliton amplification are studied based on the dynamic properties of inelastic interactions between spatial solitons. Numerical simulations are in good agreement with the analytic results. The presented results have applications in the design of birefringence-managed switching architecture.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
With the development of soliton theory, the study of optical solitons has been attractive and active, and great progress has been made in both experimental and theoretical investigations [1–19]. In recent years, soliton interactions are of particular interest because of their applications to nonlinear optics, plasma physics, multi-component Bose–Einstein condensates, and biophysics [20–24]. In the context of nonlinear optics, spatial soliton interactions are usually described by the coupled nonlinear Schrödinger (CNLS) equations [1, 25–29].
In the present study, we will examine spatial soliton interactions in the following CNLS equations [30, 31]:
where \(u(z,x)\) and \(v(z,x)\) are the envelopes of two orthogonally polarized modes. \(z\) and \(x\) denote the transverse and propagation coordinates, respectively. \(\beta =\frac{c}{w n_{2}^{L}[001]}\), and \(\Delta k\) represents the phase mismatch. \(a_{1}\) and \(a_{2}\) represent the self-phase modulation. \(k_{1}\) and \(k_{2}\) represent the cross-phase modulation. \(c_{1}\) and \(c_{2}\) represent the four-wave mixing. \(b_{1}\), \(b_{2}\), \(d_{1}\), \(d_{2}\), \(e_{1}\), and \(e_{2}\) occur only in anisotropic media and require phase matching. In particular, \(b_{1}\) and \(b_{2}\) contain only the fields orthogonal to the polarizations that are being considered and do in fact correspond to the generation of orthogonal components. In Ref. [30], stationary solutions for Eq. (1) have been identified. The effects of refractive anisotropy and induced birefringence on spatial soliton collisions in an AlGaAs slab waveguide have been studied numerically, and the interaction dynamics as a function of crystal orientation and for varying degrees of linear birefringence have been investigated [31].
However, to our knowledge, a systematic study on the coefficient constraints of \(a_{j}\), \(b_{j}\), \(c_{j}\), \(d_{j}\), \(e_{j}\), and \(k_{j}\,(j=1,2)\) has not been reported in the existing literatures. This paper will mainly focus on the following two points: First, the coefficient constraints of \(a_{j}\), \(b_{j}\), \(c_{j}\), \(d_{j}\), \(e_{j}\), and \(k_{j}\), which are the key points of this paper, will be obtained. Second, according to the different types of coefficient constraints of Eq. (1), soliton interactions will be classified as either elastic or inelastic. The conditions for elastic and inelastic interactions will be discussed. Numerical simulations will approximately reflect the analytic results and reveal the mechanisms for all-optical switching and soliton amplification.
The structure of the present paper will be as follows. In Sect. 2, with the aid of symbolic computation, the bilinear forms and analytic two-soliton solutions for Eq. (1) will be derived by use of the Hirota method, and the coefficient constraints of Eq. (1) will be obtained. In Sect. 3, asymptotic analysis will be made, discussion on the inelastic interactions will be performed, and numerical simulations will be demonstrated in order to verify the correctness of the analytic results. Finally, our conclusions will be given in Sect. 4.
2 Bilinear forms and soliton solutions for Eq. (1)
Firstly, we introduce the dependent variable transformations [32]
where \(g(z,x)\) and \(h(z,x)\) are the complex differentiable functions, and \(f(z,x)\) is a real one. After some symbolic manipulations, the bilinear forms for Eq. (1) can be obtained as
where the asterisk denotes the complex conjugate. In order to insure that \(g\) and \(h\) are not collinear, we should assume that \(b_{1}=c_{1}=b_{2}=c_{2}=0\). Hirota’s bilinear operators \( D_{z} \) and \( D_{x}\) [33] are defined by
Bilinear forms (3) can be solved by the following power series expansions for \( g(z,x) \), \( h(z,x) \), and \( f(z,x) \):
where \( \varepsilon \) is a formal expansion parameter. Substituting expressions (5) into bilinear forms (3) and equating coefficients of the same powers of \( \varepsilon \) to zero yield the recursion relations for \( g_{n}(z,x) \)’s, \( h_{n}(z,x) \)’s, and \( f_{n}(z,x) \)’s. Then, soliton solutions for Eq. (1) can be obtained.
To obtain the two-soliton solutions for Eq. (1), we assume that
where \(\theta _{1}=m\,z+p\,x=(m_{1}+i\,m_{2})\,z+(p_{1}+i\,p_{2})\,x\) and \(\theta _{2}=n\,z+w\,x=(n_{1}+i\,n_{2})\,z+(w_{1}+i\,w_{2})\,x\). \(\gamma _{1}\), \(\gamma _{2}\), \(\gamma _{3}\), \(\gamma _{4}\), \(m_{1}\), \(m_{2}\), \(p_{1}\), \(p_{2}\), \(n_{1}\), \(n_{2}\), \(w_{1}\), and \(w_{2}\) are all real constants. Substituting \( g_{1}(z,x) \) and \( h_{1}(z,x) \) into bilinear forms (3), and after some calculations, we can get the relations of the soliton parameters:
and
In the process of solving \(f_{2}(z,x)\), we obtain the following two coefficient constraints of Eq. (1),
and
In both of these constraints, the constants \(A_{1}\), \(A_{2}\), \(A_{3}\), \(A_{4}\), \(B_{1}\), \(B_{2}\), \(B_{3}\), \(B_{4}\), and \(E_{1}\) can be determined, and two-soliton solutions for Eq. (1) can be derived. Furthermore, those two coefficient constraints (7) and (8) of Eq. (1) are the only possible to derive the soliton solutions.
With the coefficient constraint (7) of Eq. (1), the soliton solutions for Eq. (1) are similar with the known results in Refs. [34, 35], and are not discussed in more details here. With the coefficient constraint (8) of Eq. (1), we derive
with
Without loss of generality, we set \( \varepsilon =1\), and the two-soliton solutions can be expressed as
3 Discussion
According to solutions (10) and (11), we will perform asymptotic analysis, discuss interactions between spatial solitons with different coefficient constraints of Eq. (1), and analyze the influence of parameters for spatial soliton interactions.
3.1 Asymptotic analysis
-
(1)
Before interactions (\(z\rightarrow -\infty \))
-
(a)
\(\theta _{1}+ \theta _{1}^{*}\sim 0,\ \theta _{2}+ \theta _{2}^{*}\rightarrow -\infty \)
$$\begin{aligned}&u^{1-} \rightarrow \frac{\gamma _{1}e^{\theta _{1}}}{1+ A_{1}e^{\theta _{1}+\theta _{1}^{*}}}=\frac{\gamma _{1}}{2\sqrt{A_{1}}}\nonumber \\&\quad \times e^{i(p_{2}x+p_{1}^{2}z-p_{2}^{2}z)}\nonumber \\&\quad \times \text {sech} \left( p_{1}x-2p_{1}p_{2}z+\frac{1}{2}\text {ln}A_{1}\right) , \end{aligned}$$(12)$$\begin{aligned}&v^{1-} \rightarrow \frac{\gamma _{2}e^{\theta _{1}}}{1+ A_{1}e^{\theta _{1}+\theta _{1}^{*}}}=\frac{\gamma _{2}}{2\sqrt{A_{1}}}\nonumber \\&\quad \times e^{i(p_{2}x+p_{1}^{2}z-p_{2}^{2}z)}\nonumber \\&\quad \times \text {sech}\left( p_{1}x-2p_{1}p_{2}z+\frac{1}{2}\text {ln}A_{1}\right) . \end{aligned}$$(13) -
(b)
\(\theta _{2}+ \theta _{2}^{*}\sim 0,\ \theta _{1}+ \theta _{1}^{*}\rightarrow +\infty \)
$$\begin{aligned}&u^{2-} \rightarrow \frac{B_{1}e^{\theta _{2}}}{A_{1}+E_{1}e^{\theta _{2}+\theta _{2}^{*}}}=\frac{B_{1}}{2\sqrt{E_{1}A_{1}}}\nonumber \\&\quad \times e^{i(w_{2}x+w_{1}^{2}z-w_{2}^{2}z)}\nonumber \\&\quad \times \text {sech}\left( w_{1}x-2w_{1}w_{2}z+\frac{1}{2}\text {ln}\frac{E_{1}}{A_{1}}\right) ,\end{aligned}$$(14)$$\begin{aligned}&v^{2-} \rightarrow \frac{B_{3}e^{\theta _{2}}}{A_{1}+ E_{1}e^{\theta _{2}+\theta _{2}^{*}}}=\frac{B_{3}}{2\sqrt{E_{1}A_{1}}}\nonumber \\&\quad \times e^{i(w_{2}x+w_{1}^{2}z-w_{2}^{2}z)}\nonumber \\&\quad \times \text {sech}\left( w_{1}x-2w_{1}w_{2}z+\frac{1}{2}\text {ln}\frac{E_{1}}{A_{1}}\right) . \end{aligned}$$(15)
-
(a)
-
(2)
After interactions (\(z\rightarrow +\infty \))
-
(a)
\(\theta _{1}+ \theta _{1}^{*}\sim 0,\ \theta _{2}+ \theta _{2}^{*}\rightarrow +\infty \)
$$\begin{aligned}&u^{1+} \rightarrow \frac{B_{2}e^{\theta _{1}}}{A_{2}+ E_{1}e^{\theta _{1}+\theta _{1}^{*}}}=\frac{B_{2}}{2\sqrt{E_{1}A_{2}}}\nonumber \\&\quad \times e^{i(p_{2}x+p_{1}^{2}z-p_{2}^{2}z)}\nonumber \\&\quad \times \text {sech}\left( p_{1}x-2p_{1}p_{2}z+\frac{1}{2}\text {ln}\frac{E_{1}}{A_{2}}\right) , \end{aligned}$$(16)$$\begin{aligned}&v^{1+} \rightarrow \frac{B_{4}e^{\theta _{1}}}{A_{2}+ E_{1}e^{\theta _{1}+\theta _{1}^{*}}}=\frac{B_{4}}{2\sqrt{E_{1}A_{2}}}\nonumber \\&\quad \times e^{i(p_{2}x+p_{1}^{2}z-p_{2}^{2}z)}\nonumber \\&\quad \times \text {sech}\left( p_{1}x-2p_{1}p_{2}z+\frac{1}{2}\text {ln}\frac{E_{1}}{A_{2}}\right) . \end{aligned}$$(17) -
(b)
\(\theta _{2}+ \theta _{2}^{*}\sim 0,\ \theta _{1}+ \theta _{1}^{*}\rightarrow -\infty \)
$$\begin{aligned}&u^{2+} \rightarrow \frac{\gamma _{3}e^{\theta _{2}}}{1+A_{2}e^{\theta _{2}+\theta _{2}^{*}}}\nonumber \\&\quad =\frac{\gamma _{3}}{2\sqrt{A_{2}}}e^{i(w_{2}x+w_{1}^{2}z-w_{2}^{2}z)}\nonumber \\&\quad \times \text {sech}\left( w_{1}x-2w_{1}w_{2}z+\frac{1}{2}\text {ln}A_{2}\right) , \end{aligned}$$(18)$$\begin{aligned}&v^{2+} \rightarrow \frac{\gamma _{4}e^{\theta _{2}}}{1+ A_{2}e^{\theta _{2}+\theta _{2}^{*}}}=\frac{\gamma _{4}}{2\sqrt{A_{2}}}\nonumber \\&\quad \times e^{i(w_{2}x+w_{1}^{2}z-w_{2}^{2}z)}\nonumber \\&\quad \times \text {sech}\left( w_{1}x-2w_{1}w_{2}z+\frac{1}{2}\text {ln}A_{2}\right) . \end{aligned}$$(19)
-
(a)
We can substitute the parameters \(A_{1}\), \(A_{2}\), \(B_{1}\), \(B_{2}\), \(B_{3}\), \(B_{4}\), and \(E_{1}\) into expressions (12)–(19) and then, investigate spatial soliton interactions. Although Eq. (1) admits two-soliton solutions, the soliton interactions in both coefficient constraints (7) and (8) of Eq. (1) are of different nature. Under the condition of the coefficient constraint (7) of Eq. (1), the solitons demonstrate the standard elastic interactions, which is a known result [36], and we will not discuss it in this case. Next, we will discuss the properties of inelastic interactions with coefficient constraints (8) of Eq. (1).
3.2 Inelastic interactions with the coefficient constraint (8) of Eq. (1)
Substituting expressions (9) into expressions (12)–(19), we can obtain that
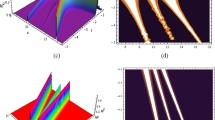
Hereby, the interactions between spatial solitons are inelastic with the coefficient constraint (8) of Eq. (1). That is, there is an energy exchange between two solitons after the interactions. In Fig. 1, the parameters are chosen as \(p_{1}=1.8\), \(p_{2}=-1\), \(w_{1}=-1.5\), \(w_{2}=1\), \(\gamma _{1}=1\), \(\gamma _{2}=2\), \(\gamma _{3}=4\), \(\gamma _{4}=1\), \(\beta =0.5\), \(a_{1}=0.5\), \(d_{1}=0.1\), \(e_{1}=0.3\), \(k_{1}=1.5\), \(a_{2}=1.5\), \(d_{2}=0.3\), \(e_{2}=0.1\), and \(k_{2}=0.5\). Two bright solitons propagate stably without shape changing before interactions. During the interactions, the solitons merge as one soliton with higher amplitude, and the solitons are compressed. After the interactions, one of the soliton amplitudes increases, and the other one decreases.

Soliton interactions between two solitons via solutions (10) and (11). Parameters are: \(p_{1}=1.8\), \(p_{2}=-1\), \(w_{1}=-1.5\), \(w_{2}=1\), \(\gamma _{1}=1\), \(\gamma _{2}=2\), \(\gamma _{3}=4\), \(\gamma _{4}=1\), \(\beta =0.5\), \(a_{1}=0.5\), \(d_{1}=0.1\), \(e_{1}=0.3\), \(k_{1}=1.5\), \(a_{2}=1.5\), \(d_{2}=0.3\), \(e_{2}=0.1\), and \(k_{2}=0.5\)
The distinct feature of the inelastic interaction process is that the interacting dynamical behavior allows one of the solitons to get suppressed, while the other one to get enhanced. The energy exchange phenomenon between two solitons occurs, but the total energy of two solitons is conserved, and the exchange phenomenon satisfies the energy conservation of solitons before and after interactions. The features of energy exchange give possible applications for all-optical switching and soliton amplification. For the soliton amplification, the amplifier does not require any external amplification medium, and the amplification process does not introduce any noise. Moreover, the switching rate and signal-to-noise ratio for the all-optical switching or soliton amplifier can be controlled through adjusting the parameters related to solutions (10) and (11) with the coefficient constraint (8) of Eq. (1).
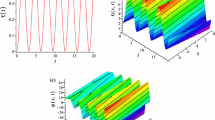
The solitons can also be inputted in phase as shown in Fig. 2. During the propagation, the interactions between solitons show the periodical changes. The two solitons attract and repel each other periodically and form the bound solitons. The bound solitons exchange their energy periodically. By changing the value of \(a_{j}\), \(d_{j}\), \(e_{j}\), and \(k_{j}\), we can change the amplitudes of spatial solitons in Fig. 3. In the above analysis, the value of \(a_{2}\), \(d_{2}\), \(e_{2}\), and \(k_{2}\) is both positive. In fact, as long as \(k_{2} \gamma _1^2+d_{2}\gamma _1 \gamma _2 +e_{2}\gamma _1 \gamma _2 +a_{2} \gamma _2^2\) is positive, the value of \(a_{2}\), \(d_{2}\), \(e_{2}\), and \(k_{2}\) can be negative.

Soliton interactions between two solitons via solutions (10) and (11). Parameters are: \(p_{1}=1.1\), \(p_{2}=0.15\), \(w_{1}=1.5\), \(w_{2}=0.15\), \(\gamma _{1}=-1\), \(\gamma _{2}=2\), \(\gamma _{3}=4\), \(\gamma _{4}=1\), \(\beta =0.5\), \(a_{1}=0.5\), \(d_{1}=0.1\), \(e_{1}=0.3\), \(k_{1}=1.5\), \(a_{2}=1.5\), \(d_{2}=0.3\), \(e_{2}=0.1\), and \(k_{2}=0.5\)

Soliton interactions between two solitons via solutions (10) and (11). Parameters are: \(p_{1}=1.8\), \(p_{2}=-1\), \(w_{1}=-1.5\), \(w_{2}=1\), \(\gamma _{1}=1\), \(\gamma _{2}=2\), \(\gamma _{3}=4\), \(\gamma _{4}=1\), \(\beta =0.5\), \(a_{1}=0.3\), \(d_{1}=0.1\), \(e_{1}=0.3\), \(k_{1}=1.0\), \(a_{2}=1.0\), \(d_{2}=0.3\), \(e_{2}=0.1\), and \(k_{2}=0.3\)
3.3 Numerical simulations’ results
To verify the correctness of the analytic results, the numerical simulation based on split-step Fourier method will be investigated. Figures for \(v\) solutions are not discussed in this subsection for the sake of simplicity. The propagation of spatial solitons is shown in Fig. 4. The stable soliton can be obtained, and the interaction between spatial solitons is inelastic in Fig. 4a. After the interaction, the spatial solitons exchange their energy. One of the spatial solitons is amplified, and the all-optical switching function is achieved. Those results are in agreement with the analytic results in Figs. 1, 2, and 3.

Numerical simulations of soliton interactions between two solitons. The corresponding initial conditions are \(u=\text {sech}(x+5)\text {exp}(15ix)+0.8\text {sech}[0.8(x-5)] \text {exp}(-10ix)\)
4 Conclusions
In conclusion, the CNLS equations [see Eq. (1)], which can be used to describe the propagation of spatial solitons in an AlGaAs slab waveguide, have been investigated analytically. With the help of symbolic computation and Hirota method, bilinear forms (3) and two-soliton solutions (10) and (11) for Eq. (1) have been obtained. The soliton interactions have been studied through the asymptotic analysis. Attention needs to be paid to the following issues:
-
1.
The key point of this paper lies in the obtaining of two coefficient constraints (7) and (8) of Eq. (1), which can divide the soliton interactions into two classes: elastic and inelastic interactions. In the condition of coefficient constraint (7) of Eq. (1), the soliton interaction has been elastic. With coefficient constraint (8) of Eq. (1), the soliton interaction has been inelastic.
-
2.
For the inelastic interaction, there has been an energy exchange between two solitons after the interactions (see Fig. 1). The features of energy exchange give the possible applications for all-optical switching and soliton amplification. Numerical simulations have been made to support the correctness of the conclusions. For the all-optical switching, the switching rate and signal-to-noise ratio can be controlled through adjusting the parameters for solutions (10) and (11). For the soliton amplification, the amplifier does not require any external amplification medium, and the amplification process does not introduce any noise.
-
3.
Either soliton interactions are elastic or inelastic, the bound solitons can be formed (see Fig. 2). The period and intensity of soliton interaction can be controlled with the changing value of wave numbers \(p_{1}\), \(p_{2}\), \(w_{1}\), and \(w_{2}\). The bound states of solitons can also be controlled when the amplitude of the initial incident pulse changes.
The investigation of this paper provides a theoretical foundation for studying the elastic or inelastic interactions in CNLS equations. Results may lead to exciting applications in nonlinear optics, particularly in the design of birefringence-managed switching architecture.
References
Agrawal, G.P.: Nonlinear Fiber Optics, 4th edn. Academic Press, San Diego (2007)
Manakov, S.V.: On the theory of two-dimensional stationary self-focusing of electromagnetic waves. JETP 65, 505–516 (1973)
Zakharov, V.E., Schulman, E.I.: To the integrability of the system of two coupled nonlinear Schrödinger equations. Physica D 4, 270–274 (1982)
Mumtaz, S., Essiambre, R.J., Agrawal, G.P.: Nonlinear propagation in multimode and multicore fibers: generalization of the Manakov equations. J. Lightwave Technol. 31, 398–406 (2013)
Sun, Z.Y., Gao, Y.T., Yu, X., Liu, Y.: Dynamics of the Manakov-typed bound vector solitons with random initial perturbations. Ann. Phys. 327, 1744–1760 (2012)
Chow, K.W., Malomed, B.A., Nakkeeran, K.: Exact solitary- and periodic-wave modes in coupled equations with saturable nonlinearity. Phys. Lett. A 359, 37–41 (2006)
Pak, O.S., Lam, C.K., Nakkeeran, K., Malomed, B.A., Chow, K.W., Senthilnathan, K.: Dissipative solitons in coupled complex Ginzburg–Landau equations. J. Phys. Soc. Jpn. 78, 084001 (2009)
Yee, T.L., Tsang, A.C.H., Malomed, B.A., Chow, K.W.: Exact solutions for domain walls in coupled complex Ginzburg–Landau equations. J. Phys. Soc. Jpn. 80, 064001 (2011)
Leblond, H., Sazonov, S.V., Mel’nikov, I.V., Mihalache, D., Sanchez, F.: Few-cycle nonlinear optics of multicomponent media. Phys. Rev. A 74, 063815 (2006)
Serkin, V.N., Hasegawa, A., Belyaeva, T.L.: Nonautonomous solitons in external potentials. Phys. Rev. Lett. 98, 074102 (2007)
Leblond, H., Mel’nikov, I.V., Mihalache, D.: Interaction of few-optical-cycle solitons. Phys. Rev. A 78, 043802 (2008)
Zhang, H., Tang, D.Y., Zhao, L.M., Wu, X.: Dark pulse emission of a fiber laser. Phys. Rev. A 80, 045803 (2009)
Zhong, W.P., Belić, M.R.: Traveling wave and soliton solutions of coupled nonlinear Schrödinger equations with harmonic potential and variable coefficients. Phys. Rev. E 82, 047601 (2010)
Zhong, W.P., Belić, M.R., Malomed, B.A., Huang, T.W.: Solitary waves in the nonlinear Schrödinger equation with Hermite–Gaussian modulation of the local nonlinearity. Phys. Rev. E 84, 046611 (2011)
Zhong, W.P., Belić, M.R., Xia, Y.Z.: Special soliton structures in the (2+1)-dimensional nonlinear Schrödinger equation with radially variable diffraction and nonlinearity coefficients. Phys. Rev. E 83, 036603 (2011)
Dai, C.Q., Zhou, G.Q., Zhang, J.F.: Controllable optical rogue waves in the femtosecond regime. Phys. Rev. E 85, 016603 (2012)
Dai, C.Q., Zhu H.P.: Superposed Kuznetsov-Ma solitons in a two-dimensional graded-index grating waveguide. J. Opt. Soc. Am. B 30, 3291–3297 (2013)
Dai, C.Q., Zhu H.P.: Superposed Akhmediev breather of the (3 + 1)-dimensional generalized nonlinear Schrödinger equation with external potentials. Ann. Phys. 341, 142–152 (2014)
Dai, C.Q., Wang X.G., Zhou G.Q.: Stable light-bullet solutions in the harmonic and parity-time-symmetric potentials. Phys. Rev. A 89, 013834 (2014)
Maimistov, A.I.: Solitons in nonlinear optics. Quantum Electron. 40, 756–781 (2010)
Akbari-Moghanjoughi, M.: Propagation and head-on collisions of ion-acoustic solitons in a Thomas–Fermi magnetoplasma: relativistic degeneracy effects. Phys. Plasmas 17, 072101 (2010)
Liang, Z.X., Zhang, Z.D., Liu, W.M.: Dynamics of a bright soliton in Bose–Einstein condensates with time-dependent atomic scattering length in an expulsive parabolic potential. Phys. Rev. Lett. 94, 050402 (2005)
Eiermann, B., Anker, T., Albiez, M., Taglieber, M., Treutlein, P., Marzlin, K.P., Oberthaler, M.K.: Bright Bose–Einstein gap solitons of atoms with repulsive interaction. Phys. Rev. Lett. 92, 230401 (2004)
Duduiala, C.I., Wattis, J.A.D., Dryden, I.L., Laughton, C.A.: Nonlinear breathing modes at a defect site in DNA. Phys. Rev. E 80, 061906 (2009)
Vijayajayanthi, M., Kanna, T., Lakshmanan, M.: Multisoliton solutions and energy sharing collisions in coupled nonlinear Schrödinger equations with focusing, defocusing and mixed type nonlinearities. Eur. Phys. J. Spec. Top. 173, 57–80 (2009)
Jiang, Y., Tian, B., Liu, W.J., Sun, K., Li, M., Wang, P.: Soliton interactions and complexes for coupled nonlinear Schrödinger equations. Phys. Rev. E 85, 036605 (2012)
Sheppard, A.P., Kivshar, Y.S.: Polarized dark solitons in isotropic Kerr media. Phys. Rev. E 55, 4773–4782 (1997)
Pulov, V.I., Uzunov, I.M., Chacarov, E.J., Lyutskanov, V.L.: Lie group symmetry classification of solutions to coupled nonlinear Schrödinger equations. Proc. SPIE 6604, 66041K (2007)
Belmonte-Beitia, J., Pérez-García, V.M., Brazhnyi, V.: Solitary waves in coupled nonlinear Schrödinger equations with spatially inhomogeneous nonlinearities. Commun. Nonlinear Sci. Numer. Simul. 16, 158–172 (2011)
Hutchings, D.C., Aitchison, J.S., Arnold, J.M.: Nonlinear refractive coupling and vector solitons in anisotropic cubic media. J. Opt. Soc. Am. B 14, 869–879 (1997)
Schauer, A., Mel’nikov, I.V., Aitchison, J.S.: Collisions of orthogonally polarized spatial solitons in AlGaAs slab waveguides. J. Opt. Soc. Am. B 21, 57–62 (2004)
Liu, W.J., Tian, B., Zhang, H.Q.: Types of solutions of the variable-coefficient nonlinear Schrödinger equation with symbolic computation. Phys. Rev. E 78, 066613 (2008)
Hirota, R.: Exact solution of the Korteweg-de Vries equation for multiple collisions of solitons. Phys. Rev. Lett. 27, 1192–1194 (1971)
Hioe, F.T., Salter, T.S.: Special set and solutions of coupled nonlinear Schrödinger equations. J. Phys. A 35, 8913–8928 (2002)
Hioe, F.T.: N coupled nonlinear Schrödinger equations: special set and applications to N = 3. J. Math. Phys. 43, 6325–6338 (2002)
Stegeman, G.I., Segev, M.: Optical spatial solitons and their interactions: universality and diversity. Science 286, 1518–1523 (1999)
Acknowledgments
This work has been supported by the National Natural Science Foundation of China under Grant No. 61205064, and by the Visiting Scholar Funds of the Key Laboratory of Optoelectronic Technology & Systems under Grant No. 0902011812401_5, Chongqing University.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Liu, WJ., Lei, M. Types of coefficient constraints of coupled nonlinear Schrödinger equations for elastic and inelastic interactions between spatial solitons with symbolic computation. Nonlinear Dyn 76, 1935–1941 (2014). https://doi.org/10.1007/s11071-014-1258-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-014-1258-8