
Abstract
Existing improved versions of the optimal velocity model have been proved to be capable to enhance the traffic flow stability against a small perturbation with the cooperative control of other vehicles. In this paper, we propose an extended optimal velocity model with consideration of velocity difference between the current velocity and the historical velocity of the considered vehicle. We conduct the linear stability analysis to the extended model with concluding that the traffic flow can be stabilized by taking into account the velocity difference between the current velocity and the historical velocity of the considered vehicle. Namely, the traffic stability can be improved only by each vehicle’s self-stabilizing control, without the cooperative driving control from others. It is also found that the time gap between the current velocity and the historical velocity has an important impact on the stability criterion. To describe the phase transition, the mKdV equation near the critical point is derived by using the reductive perturbation method. The theoretical results are verified using numerical simulation. Finally, it is clarified that the self-stabilizing control in velocity is essentially equivalent to the parameter adjusting of the sensitivity.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In recent years, the problem of traffic jam has been a serious issue in many countries including developed and developing nations. In order to obtain a better understanding of driver behavior and traffic dynamic, many engineers, physicists, mathematicians, and behavioral psychologists devoted themselves into the researches of the traffic flow dynamics [1–14]. As a result, a considerable variety of traffic models have been proposed to mathematically describe and explain the complex phenomena in traffic flow over the past few decades. Generally, traffic flow models can be categorized into macroscopic, mesoscopic, and microscopic models, with respect to the aggregation level. Macroscopic models describe traffic flow at low level of detail analogous to liquids or gases in vehicle motion, while microscopic models explain traffic dynamics in terms of the motion equation of individual vehicle. Mesoscopic models are intermediate which combines microscopic and macroscopic approaches to a hybrid model.
Basically, the car-following models with optimal velocity function are an important representative of microscopic traffic flow models and have been studied extensively by the techniques of simulation and analysis. The optimal velocity model (OVM, for short) is based on the idea that a driver adjusts vehicle velocity according to the preceding headway [7]. Later, many improvements have been done to make it conform to actual observations. Helbing and Tilch conducted a calibration for the OVM by using the empirical car-following data and suggested a generalized force model (GFM, for short) to overcome the shortcomings of high acceleration and unrealistic deceleration occurring in the OVM [8]. In 2001, Jiang et al. [9] found that the GFM exhibited poor delay time of car motion and kinematic wave speed at high density and presented a full velocity difference model (FVDM, for short). Soon afterward, Li et al. [10] developed a velocity-difference-separation model (VDSM, for short) to remove the unpractical negative speed in traffic simulation.
Fast development of information and communication technologies (ICT, for short) is transforming our life style via high-speed information superhighway. The traffic control and management have been transformed thoroughly by use of the ICT system, which makes the intelligent traffic system (ITS, for short) shift to the future solution to the severe traffic congestion. Under this background, many scholars turn to propose some extended car-following models considering the cooperative driving control which incorporate the traffic information of other vehicles except for the immediately preceding one. Nagatani and Li et al. proposed two car-following models taking into account the next-nearest-neighbor interaction in front [11, 12]. Xue [14] suggested a lattice model with the consideration of optimal current of the next immediately preceding vehicle. In addition, some researchers advised some generalized traffic flow models considering the motion information of many preceding or following vehicles in an environment of ITS [15–22]. All of above work belong to the scope of cooperative driving control, in which motion equation of each vehicle consists of the traffic information from both the considered vehicle itself and the others. It has been found by them that the cooperative driving control can improve the stability of traffic system.
However, there are some objective factors which may make the cooperative driving control difficult to put into effect in practice. Firstly, the safe and reliable traffic information obtaining of the other vehicles is the precondition of the future cooperative driving. No traffic data, no cooperative driving control. A vehicle cannot insist on carrying out the cooperative control without the traffic data of others. Secondly, high bandwidth and qualitative continuity demands for a huge amount of traffic data, which need a higher requirement for network of the connected vehicle. The implementation effect of the cooperative control highly depends on the quality of the communication network. Even speak, even if bulk traffic data can be delivered in real time, transfer delays are widely found in the wireless LAN, which has been proved to take negative effect in stabilizing traffic flow [23–26]. In addition, many vehicles may enter or leave from any location of road at any time in traffic fields, which makes some separations between successive vehicles varying abruptly. It consumedly increases the possibility that drivers conduct incorrect operation for reacting to the error information from other vehicles.
But, is it possible that the traffic flow can be stabilized only by each vehicle’s self-stabilizing control without the cooperative driving control from others? How to extend the optimal velocity model to stabilize the traffic flow with the traffic data of the considered vehicle itself? What is the nature of this kind of self-stabilizing control? To our knowledge, these questions have not been researched and addressed so far. In this paper, we concentrate on this direction. We try to present a differential-difference equation of traffic dynamics which extends the OVM to take into account the velocity difference between the current velocity and the historical velocity of the considered vehicle. We conduct the linear stability analysis to verify the purpose of self-stabilizing effect. Besides, we apply nonlinear analysis to the generalized model and derive the mKdV equation near the critical point by means of the perturbation method [27–31]. We compare the results of theoretical analysis with those of numerical simulations. We reveal the nature of the self-stabilizing control in extended model.
This paper is organized as follows. In Sect. 2, the improved OVM is proposed to consider the velocity difference between the current velocity and the historical velocity of the considered vehicle for purpose to self-stabilizing control. The linear stability analysis of the proposed model is conducted, and the stability condition is obtained in Sect. 3. The self-stabilizing control dependence of the kink solution for traffic jams is obtained from the method of nonlinear analysis in Sect. 4. To verify the validity of theoretical analysis, we will compare it with the result of our simulations in Sect. 5.
2 Extended car-following model
Car-following models are the most important representatives of microscopic traffic modeling which describe traffic dynamics at high level of detail such as the motion equation of individual vehicle. The OVM (for short) proposed by Bando et al. [7] in 1995 is one of the well-known and favorable car-following model, which has a good description of some nonlinear phenomena in traffic system. The motion equation is given as follows:
where \(a\) is the sensitivity of a driver, and the basic idea of the model is the acceleration \(dv_n (t)/dt\) of the \(nth\) vehicle at time \(t\) is determined by the difference between the actual velocity\(v_n (t)\) and an optimal velocity \(V(\Delta x_n (t))\), which depends on the headway \(\Delta x_n (t)\) to the preceding vehicle, and takes hyperbolic tangent function of the following form:
where \(h_c =5\) is the safety distance and \(v_{\max } =2\) is the maximal velocity. The optimal velocity function is a monotonically increasing function, and it has an upper limit of velocity (maximum velocity).
From the viewpoint of traffic management, the most important problem is to suppress the traffic jams. Based on the fact that ITS is widely available, many extended OVMs are proposed to consider the cooperative driving control using other vehicles’ traffic data provided by ITS. Just as we mentioned in introduction, the traffic jams suppressing by incorporating other vehicle’s traffic information has some troubles in practical execution. We want the traffic flow to be stabilized only utilizing the traffic data of each vehicle itself. We think the historical velocity of each vehicle may play an active role in keeping the traffic flow stable. For this reason, we develop an extended optimal velocity model taking into account the velocity difference between the current velocity and the historical velocity of the considered vehicle, whose dynamics equation is
where \(t_0 \) is the time gap between the current time \(t\) and the historical time \(t-t_0, D_n =v_n (t)-v_n (t-t_0 )\) represents the velocity difference between the current velocity \(v_n (t)\) and the historical velocity \(v_n (t-t_0 )\) of the vehicle \(n\). We expect the velocity difference term \(D_n \) can affect the traffic stability with suppressing traffic jams, and it is introduced into our extended model by the constant coefficient \(\lambda \). From the Eq. (3), we can observe that the traffic jams suppressing term \(D_n \) is independent of the traffic information of other vehicles. It is completely rely on the considered vehicle’s traffic data, which can be obtained by the sensors in the vehicle. If the velocity difference between the current velocity and the historical velocity can stabilize the traffic system as we expect, it means that the improvement of the traffic stability can be achieved by self-stabilizing control of each individual. So we call the velocity term \(D_n \) as self-stabilizing control term.
3 Linear stability analysis
In order to examine whether the introducing of the velocity difference between the current velocity and the historical velocity can stabilize the traffic system as we expect, we analyze the extended car-following model in a linear approach of stability analysis. Generally, linear stability analysis is conducted to show the homogeneous traffic flow’s ability against a small disturbance. The homogeneous traffic flow is defined by such a state that all vehicles move with the same headway \(b\) and the optimal velocity \(V(b)\), and it can be written as:
where \(N\) is the total number of cars, \(L\) is the length of the road, and \(b\) is the steady headway.
To see whether the solution (4) is stable or not, we add a small deviation \(y_n (t)\),
We substitute Eq. (5) into Eq. (3) and linearize it:
By taking \(y_n (t)=e^{ikn+zt}\), one can obtain the following equation:
Simplifing Eq. (7), we can obtain:
In order to solve Eq. (8), we expand \(e^{ik}=1+ ik+\frac{(ik)^{2}}{2},e^{-t_0 z}=1-t_0 z\,+\,\frac{(t_0 z)^{2}}{2}\) and insert them into Eq. (8), with obtaining the formula as follows:
By expanding \(z=z_1 ik+z_2 (ik)^{2}+\cdots \) and inserting it into Eq. (9), we obtain the first- and second-order terms of coefficients in the expression of \(z\), respectively, which are given by
The uniformly steady-state flow is unstable if \(z_2 <0\). Consequently, the stability criterion can be derived to the following expression:
For small disturbances with lone wavelengths, the homogeneous traffic flow is unstable in the condition that:
Comparing the stability condition (13) with that of the original OVM, one can draw a conclusion that the stable region of new extended is enlarged to the region
by taking into account the velocity difference between the current velocity and the historical velocity of the considered vehicle, which means that the traffic stability can be improved only by each vehicle’s self-stabilizing control, without the cooperative driving control from others.
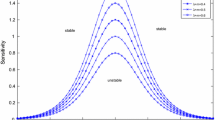
Let us discuss the relationship between the traffic stability and self-stabilizing control in detail. It can be obtained from the stability criterion (13) that the stability of traffic system can be improved with the increasing of the control coefficient \(\lambda \) and the time gap \(t_0\), when the product of \(\lambda \) and \(t_0 \) is less than 1. Figure 1 shows the neutral stability lines in the headway-sensitivity space for different control coefficient \(\lambda \) with a fixed value of time gap \(t_0 =\) 1 s. In the figure, the peak value of each curve represents the critical point \((h_c, a_c )\). The region above the curves is the stable region with no traffic jams appearing, while the region below the line will fall into the unstable region with the go-and-stop density waves evolving backward. It is shown that the neutral stability lines become lower with the increase of the control coefficient \(\lambda \), which denotes that the stable region is enlarged with the increase of the intensity of the self-stabilizing control. Besides, Fig. 2 shows the neutral stability lines in the headway-sensitivity space for different time gap \(t_0\) with a fixed value of control coefficient \(\lambda =0.2\). It is found that the time gap has also an important influence on the traffic stability, namely the increase in the time gap \(t_0 \) will lead to a more stable traffic system. At the same time, it should be noted that the stability improvement for the increasing of the control coefficient \(\lambda \) and the time gap \(t_0\) is not limitless, and the theoretical limitation of the criterion (13) is under the condition that the product of \(\lambda \) and \(t_0\) is less than 1.

The neutral stability in the headway-sensitivity space for different control coefficient \(\lambda \) with a fixed value of time gap \(t_0 =\) 1 s

The neutral stability in the headway-sensitivity space for different time gap \(t_0\) with a fixed value of control coefficient \(\lambda =0.2\)
4 Nonlinear analysis
When the stability criterion (13) is not met, the vehicle flow will form density waves at some particular positions on road. Nonlinear wave equation can be derived to describe the kink–antikink solution of these density waves. In order to examine the self-stabilizing control dependence of the kink solution for traffic jams, the nonlinear analysis is carried out to study the slowly varying behavior for the long waves in the unstable region, with the help of a small positive scaling parameter \(\varepsilon \). The simplest way to describe the long wavelength modes is the long-wave expansion.
It is convenient to rewrite Eq. (2) by using the asymmetric forward difference as following:
We introduce slow scales for space variable \(j\) and time variable \(t\) and define the slow variables \(X\) and \(T\) for \(0<\varepsilon \le 1\) as follows,
where \(b\)is a constant to be determined. We can set the headway as follows:
We further rewrite the Eq. (15) as:
Substituting Eqs. (16) and (17) into Eq. (18), and making the Taylor expansions to the fifth order of \(\varepsilon \), one can obtain the following nonlinear partial differential equation:
where \(V^{{\prime }{\prime }{\prime }}=\left. {\frac{d^{3}V\left( {\rho _j } \right) }{d\rho _j ^{3}}} \right| _{\rho _j =\rho _c } \)
By taking \(b={V}'\), the second- and third-order terms of \(\varepsilon \) are eliminated from Eq. (19). We consider the neighborhood of the critical point \(\tau _c \):
Equation (19) can be rewritten as follows:
Let us set the coefficients of \(\partial _X^3 R,\partial _X R^{3},\partial _X^2 R,\partial _X^4 R, and\, \partial _X^2 R^{3}\) as \(-g_1, g_2, g_3, g_4, and\, g_5\), respectively. Equation (22) can be rewritten
where
In order to derive the regularized mKdV equation with higher order correction, we make the following transformations for Eq. (22):
Thus, we obtain the standard mKdV equations:
where
Equation (25) is the mKdV equation with an \(\mathrm{O}\left( \varepsilon \right) \) correction term on the right-hand side. If we ignore the \(\mathrm{O}\left( \varepsilon \right) \) terms in Eq. (22), we get the mKdV equation with a kink solution as the desired solution
Next, assuming that \({R}'(X,{T}')={R}'_0 (X,{T}')+\varepsilon {R}'_1 (X,{T}')\), we take into account the \(\mathrm{O}\left( \varepsilon \right) \) correction. In order to determine the selected value of the propagation velocity \(c\) for the kink solution, it is necessary to satisfy the solvability condition
where \(M[{R}'_0 ]=M[{R}']\) for Eq. (26).
By performing the integration, we obtain the selected velocities
We can obtain the value of propagation velocity for any vehicle by substituting the value \(g_1, g_2, g_3, g_4, and g_5\) into Eq. (29).
We can obtain the solution of the mKdV equation as:
From the extended OVM, We can know \(V^{\prime }=v_{\max } /2\) and \({V}'''=-v_{\max } \), and the corresponding amplitude \(c\) of the kink–antikink soliton solution is computed by
The kink–antikink solution represents the coexisting phase consisting of the freely moving phase with low density and the jammed phase with high density. Their headways are given by \(\Delta x=h_c \pm A\).
5 Numerical simulation
In this section, we will examine the effect of self-stabilizing control on the traffic flow stability by conducting numerical simulations. The usual practice of the stability simulation is to check the homogeneous traffic flow’s ability against a small disturbance. The theoretical results reveal that the stability of traffic system can be enhanced with the increasing of the control coefficient \(\lambda \) and the time gap \(t_0\), when the product of \(\lambda \) and \(t_0\) do not reach the critical value. In order to simplify the analysis, we choose to conduct the simulation on a ring road without the need to specify boundary condition.
We solve Eq. (3) numerically with optimal velocity function (2) by the method of the fourth-order Runge-Kutta. It is assumed that all vehicles run under a periodic boundary with the initial arrangement as follows:
where the total number of vehicle is \(N=100\).
First of all, Let us examine the effect of the control coefficient \(\lambda \) on the stability of traffic system of single lane, when the product of \(\lambda \) and \(t_0\) is less than 1. Figure 3 shows typical traffic patterns after a sufficient time step \(t=9.9\times 10^{4}\) with the time gap \(t_0 =1\) and the sensitivity \(a=1.5\), where the patterns (a), (b), (c), and (d) correspond to the headway evolution for different \(\lambda \). In patterns (a–c), the density waves appear because the stability criterion (13) is not satisfied. The traffic flow state transits from the homogeneous flow to the inhomogeneous go-and-stop traffic jams, after the adding of the small disturbance. The congested traffic flow is characterized by the density waves propagating backward as the kink–antikink soliton, which corresponds to the nonlinear analytical results in Sect. 4. At the same time, one can observe that the traffic stability becomes better and better with increasing the control coefficient \(\lambda \). If the control coefficient is further increased to \(\lambda =0.3\), the traffic density waves finally disappear with the initial perturbation suppressed successfully in the pattern (d). Figure 4 displays the time evolutions of the headway profile with all subplots corresponding to those in Fig. 3, respectively. It is found that with increasing control coefficient \(\lambda \), the amplitude of the headway wave is reduced increasingly, and the non-uniform flow becomes the uniform traffic flow from the profile (a) to (d). All these findings show that the traffic stability can be improved by taking into account the velocity difference between the current velocity and the historical velocity of the considered vehicle. The self-stabilizing control can efficiently suppress traffic jams, which agrees well with the theoretical analysis.

Time evolutions of the headway profile according to the proposed model for a \(\lambda =0.0\), b \(\lambda =0.1\), c \(\lambda =0.2\), and d \(\lambda =0.3\), respectively, where \(t_0 =1\) and \(a=1.5\, \mathrm{s}^{-1}\)

The snapshots of headway configuration of all vehicles at time steps \(t=9.9\times 10^{4}\) for a \(\lambda =0.0\), b \(\lambda =0.1\), c \(\lambda =0.2\), and d \(\lambda =0.3\), respectively, where \(t_0 =1\) and \(a=1.5\)
Next, we consider the case in which the time gap \(t_0 \) increases with a fixed value of control coefficient \(\lambda =0.2\), when the product of \(\lambda \) and \(t_0 \) is less than 1. Figure 5 displays typical traffic patterns after a sufficiently time steps \(t=9.9\times 10^{4}\) with the control coefficient \(\lambda =0.2\) and the sensitivity \(a=1.5\), where the patterns (a), (b), (c), and (d) correspond to the headway evolution for different time gap \(t_0 \). Figure 6 gives the time evolutions of the headway profile with all subplots corresponding to those in Fig. 5, respectively. We can also observe that the homogeneous steady flow with a small disturbance finally evolves to the patterns (a)–(c) for \(t_0 =0.0\), 0.5, and 1.0, respectively, with density waves propagates backward, but evolves to initial stable traffic for \(t_0 =1.3\) with the small perturbation disappearing. It means that the time gap has great effect on the stability of traffic flow, and the traffic system can be stabilized with the increasing of time gap \(t_0 \). This conclusion is in good agreement with the theoretical analysis.

Time evolutions of the headway profile according to the proposed model for a \(t_0 =0.0\), b \(t_0 =0.5\) s, c \(t_0 =1.0\) s, and d \(t_0 =1.3\) s, respectively, where \(\lambda =0.2\) and \(a=1.5\)

The snapshots of headway configuration of all vehicles at time steps \(t=9.9\times 10^{4}\) for a \(t_0 =0.0\), b \(t_0 =0.5\, \mathrm{s}\), c \(t_0 =1.0\,\mathrm{s}\), and d \(t_0 =1.3\,\mathrm{s}\), respectively, where \(\lambda =0.2\) and \(a=1.5\)
From the stability condition (13), one can obtain that the effect of the self-stabilizing control on traffic stability need meet certain condition, which is that the product of \(\lambda \) and \(t_0 \) should be less than 1. When the product is greater than 1, the traffic flow’s stabilizing effect will not take effect any more, and the traffic flow will return to the unstable state. In order to verify this analysis, we conduct the simulation for the case that the product of \(\lambda \) and \(t_0 \) is greater than 1. Figure 7 shows the space-time evolution of the headway after the time steps \(t=9.9\times 10^{4}\) with the control coefficient \(\lambda =0.55\) and the time gap \(t_0 =2.0\). We can see that the homogeneous steady flow with a small disturbance finally evolves to drastic changes of the density waves as we expect, which verifies our theoretical analysis. On the other hand, the upper boundary of the product of \(\lambda \) and \(t_0 \) do not means the self-stabilizing control is worthless for stabilizing traffic system. There are plenty of scope to perform the stabilizing task under the upper boundary of the product of \(\lambda \) and \(t_0 \).

The space-time evolution of the headway after the time steps \(t=9.9\times 10^{4}\) with the control coefficient \(\lambda =0.55\) and the time gap \(t_0 =2.0\)
6 Nature of self-stabilizing control
We mainly concentrate on the analysis of the self-stabilizing control on the stability in a single-lane traffic system. The self-stabilizing control in velocity has been proved to be capable to further improve the traffic stability. However, what is the nature of this kind of self-stabilizing control of each vehicle. Here, we will discuss this problem.
In order to simplify Eq. (3), we carry out the Taylor expansion of the variables \(v_n \left( {t-t_0 } \right) \) and neglect the nonlinear terms,
Substituting Eq. (35) into Eq. (3), one can get:
Simplifying Eq. (36), we can obtain the following dynamic equation of each vehicle:
From the Eq. (37), it can be concluded that the self-stabilizing control in velocity is essentially equivalent to the parameter adjusting of the sensitivity. According to the stability criterion of original OVM, the stability condition of the Eq. (37) is
which is the same with the stability criterion (13).
7 Summary
The traffic jams suppressing by incorporating other vehicle’s traffic information has some troubles in practical execution. The traffic flow is expected to be stabilized only utilizing the traffic data of each vehicle itself. Based on this idea, an extended optimal velocity model has been proposed to taking into account the velocity difference between the current velocity and the historical velocity of the considered vehicle. The linear stability analysis has been applied to the extended model and has examined the traffic flow’s stabilization via each vehicle’s self-stabilizing control, without the cooperative driving control from others. It has been found that the time gap between the current velocity and the historical velocity has a great effect on the stability criterion. By using the reductive perturbation method, we have derived the modified KdV equation near the critical point, with obtaining the dependence of the propagation kink solution for traffic jams on the self-stabilizing term. Finally, we have conducted numerical simulation to verify the theoretical analysis and have clarified the nature of the self-stabilizing control in velocity.
References
Orosz, G., Wilson, R.E., Krauskopf, B.: Global bifurcation investigation of an optimal velocity traffic model with driver reaction time. Phys. Rev. E 70, 026207 (2004)
Peng, G.H., Nie, Y.F., Cao, B.F., Liu, C.Q.: A driver’s memory lattice model of traffic flow and its numerical simulation. Nonlinear Dyn. 67, 1811–1815 (2012)
Nagatani, T.: The physics of traffic jams. Rep. Prog. Phys. 65, 1331–1386 (2002)
Zhu, W.X., Zhang, C.H.: Analysis of energy dissipation in traffic flow with a variable slope. Phys. A 392, 3301–3307 (2013)
Zhu, W.X.: Motion energy dissipation in traffic flow on a curved road. Int. J. Mod. Phys. C 24, 1350046 (2013)
Ge, H.X., Dai, S.Q., Dong, L.Y.: Xue. Y.: Stabilization effect of traffic flow in an extended car-following model based on an intelligent transportation system application. Phys. Rev. E 70, 066134 (2004)
Bando, M., Hasebe, K., Nakayama, A.: Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 51, 1035–1042 (1995)
Helbing, D., Tilch, B.: Generalized force model of traffic dynamics. Phys. Rev. E 58, 133–138 (1998)
Jiang, R., Wu, Q., Zhu, Z.: Full velocity difference model for a car-following theory. Phys. Rev. E 64, 017101 (2001)
Li, Z.P., Liu, Y.: A velocity-difference-separation model for car-following theory. Chin. Phys. 15, 1570–1576 (2006)
Nagatani, T.: Stabilization and enhancement of traffic flow by the next-nearest-neighbor interaction. Phys. Rev. E 60, 6395–6401 (1999)
Li, Z.P., Zhang, R.: An extended non-lane-based optimal velocity model with dynamic collaboration. Math. Probl. Eng. 124908 (2013)
Wen, J.A., Tian, H.H., Xue, Y.: Lattice hydrodynamic model for pedestrian traffic with the next-nearest-neighbor pedestrian. Acta Phys. Sinch. E.D 59, 3817–3823 (2010)
Xue, Y.: Lattice models of the optimal traffic current. Acta Phys. SinCh. E.D 53, 25–30 (2004)
Hua, Y.M., Ma, T.S., Chen, J.Z.: An extended multi-anticipative delay model of traffic flow. Commun. Nonlinear Sci. Numer. Simul. 19, 3128–3135 (2014)
Tang, T.Q., Huang, H.J., Zhao, S.G., Shang, H.Y.: A new dynamic model for heterogeneous traffic flow. Phys. Lett. A 373, 2461–2466 (2009)
Li, X.L., Li, Z.P., Han, X.L., Dai, S.Q.: Jamming transition in extended cooperative driving lattice hydrodynamic models including backward-looking effect on traffic flow. Int. J. Mod. Phys. C 19, 1113–1127 (2008)
Peng, G.H.: Stabilisation analysis of multiple car-following model in traffic flow. Chin. Phys. B 19, 056401 (2010)
Peng, G.H., Sun, D.H.: A dynamical model of car-following with the consideration of the multiple information of preceding cars. Phys. Lett. A 374, 1694–1698 (2010)
Yu, L., Shi, Z.K., Zhou, B.C.: Kink–antikink density wave of an extended car-following model in a cooperative driving system. Commun. Nonlinear Sci. Numer. Simul. 13, 2167–2176 (2008)
Sun, D.H., Liao, X.Y., Peng, G.H.: Effect of looking backward on traffic flow in an extended multiple car-following model. Phys. A 390, 631–635 (2011)
Li, Z.P., Liu, Y.C.: Analysis of stability and density waves of traffic flow model in an ITS environment. Eur. Phys. J. B 53, 367–374 (2006)
Zhu, H.B., Dai, S.Q.: Analysis of car-following model considering driver’s physical delay in sensing headway. Phys. A 387, 3290–3298 (2008)
Kang, Y.R., Sun, D.H.: Lattice hydrodynamic traffic flow model with explicit drivers’ physical delay. Nonlinear Dyn. 71, 531–537 (2013)
Tang, T.Q., Huang, H.J., Zhao, S.G., Xu, G.: An extended OV model with consideration of driver’s memory. Int. J. Mod. Phys. B 23, 743–752 (2009)
Hu, Y.M., Ma, T.S., Chen, J.Z.: An extended multi-anticipative delay model of traffic flow. Commun. Nonlinear Sci. Numer. Simul. 19, 3128–3135 (2014)
Zhou, J., Shi, Z.K., Cao, J.L.: Nonlinear analysis of the optimal velocity difference model with reaction-time delay. Phys. A 396, 77–87 (2013)
Nagatani, T.: Modified KdV equation for jamming transition in the continuum models of traffic. Phys. A 261, 599–607 (1998)
Nagatani, T.: Thermodynamic theory for the jamming transition in traffic flow. Phys. Rev. E 58, 4271–4276 (1998)
Yu, L., Shi, Z.K.: Nonlinear analysis of an extended traffic flow model in ITS environment. Chaos Solitons Fractals 36, 550–558 (2008)
Ge, H.X.: The Korteweg-de Vries soliton in the lattice hydrodynamic model. Phys. A 388, 1682–1686 (2009)
Acknowledgments
This work is supported by the Natural Science Foundation of China under Grant No. 61202384, the Fundamental Research Funds for the Central Universities under Grant No. 0800219198, the Natural Science Foundation of Shanghai under Grant No. 12ZR1433900.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Li, Z., Li, W., Xu, S. et al. Analyses of vehicle’s self-stabilizing effect in an extended optimal velocity model by utilizing historical velocity in an environment of intelligent transportation system. Nonlinear Dyn 80, 529–540 (2015). https://doi.org/10.1007/s11071-014-1886-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-014-1886-z