
Abstract
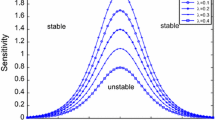
The class of bi-directional optimal velocity models can describe the bi-directional looking effect that usually exists in the reality and is even enhanced with the development of the connected vehicle technologies. Its combined string stability condition can be obtained through the method of the ring-road based string stability analysis. However, the partial string stability about traffic fluctuation propagated backward or forward was neglected, which will be analyzed in detail in this work by the method of transfer function and its H ∞ norm from the viewpoint of control theory. Then, through comparing the conditions of combined and partial string stabilities, their relationships can make traffic flow be divided into three distinguishable regions, displaying various combined and partial string stability performance. Finally, the numerical experiments verify the theoretical results and find that the final displaying string stability or instability performance results from the accumulated and offset effects of traffic fluctuations propagated from different directions.
Article PDF
Similar content being viewed by others

Avoid common mistakes on your manuscript.
References
BANDO M, HASEBE K, NAKAYAMA A. Dynamical model of traffic congestion and numerical simulation [J]. Physical Review E, 1995, 51(2): 1035–1042.
BANDO M, HASEBE K, NAKANISHI K. Analysis of optimal velocity model with explicit delay [J]. Physical Review E, 1998, 58(5): 5429–5435.
DAVIS L C. Comment on “Analysis of optimal velocity model with explicit delay” [J]. Physical Review E, 2002, 66(3): 038101.
DAVIS L C. Modifications of the optimal velocity traffic model to include delay due to driver reaction time [J]. Physica A, 2003, 319: 557–567.
OROSZ G, WILSON R E, KRAUSKOPF B. Global bifurcation investigation of an optimal velocity traffic model with driver reaction time [J]. Physical Review E, 2004, 70: 026207.
OROSZ G, KRAUSKOPF B, WILSON R E. Bifurcations and multiple traffic jams in a car-following model with reaction-time delay [J]. Physica D, 2005, 211: 277–293.
YU L, LI T, SHI Z K. Density waves in a traffic flow model with reaction-time delay [J]. Physica A, 2010, 389(13): 2607–2616.
CHEN J Z, SHI Z K, HU Y M. Stabilization analysis of multiple look-ahead model with driver reaction delays [J]. International Journal of Modern Physics C, 2012, 23(6): 1250048.
HELBING D, TILCH B. Generalized force model of traffic dynamics [J]. Physical Review E, 1998, 58(1): 133–138.
JIANG R, WU Q S, ZHU Z J. Full velocity difference model for a car-following theory [J]. Physical Review E, 2001, 64(1): 017101.
LENZ H, WAGNER C K, SOLLACHER R. Multi-anticipative car-following model [J]. The European Physical Journal B, 1999, 7(2): 331–335.
HAESBE K, NAHWMAA A, SUGIYAMA Y. Equivalence of linear response among extended optimal velocity models [J]. Physical Review E, 2004, 69: 017103.
GE H X, DAI S Q, DONG L Y. Stabilizaiton effect of traffic flow in an extended car following model based on an intelligent transportation system application [J]. Physical Review E, 2004, 70:066134.
SHI W, CHEN N G, XUE Y. An asymptotic solvable multiple “look-ahead” model with multi-weight [J]. Conmmunications in Theoretical Physics, 2007, 48(6): 1088–1092.
YU L, SHI Z K, ZHOU B C. Kink-antiKink density wave of an extended car following model in a cooperative driving system [J]. Communicaitons in Nonlinear Science and Numerical Simulation, 2008, 13(10): 2167–2176.
XIE D F, GAO Z Y, ZHAO X M. Stabilizaiton of traffic flow based on the multiple information of preceding cars [J]. Communications in Computational Physics, 2008, 3: 899–912.
PENG G H, SUN D H. A dynamical model of car following with the consideration of the multiple information of preceding cars [J]. Physics Letters A, 2010, 374: 1694–1698.
ZHENG L, MA S F, ZHONG S Q. Analysis of honk effect on the traffic flow in a cellular automaton model [J]. Physica A, 2011, 390(6): 1072–1084.
ZHENG L, MA S F, JING J, RAN B, ZHONG S Q. Incorporating backward-looking behavior into cellular automaton model [C]// 91st Annual Meeting of Transportation Research Board, Washington D. C: TRB, 2012: 12–0835.
ZHENG L, ZHONG S Q, MA S F. Towards the bi-directional cellular automaton model with perception ranges [J]. Physica A, 2013, 392(14): 3028–3038.
NAKAYAMA A, SUGIYAMA Y, HASEBE K. Effect of looking at the car that follows in an optimal velocity model of traffic flow [J]. Physical Review E, 2001, 65: 016112.
HASEBE K, NAKAYAMA A, SUGIYAMA Y. Dynamical model of a cooperative driving system for freeway traffic [J]. Physical Review E, 2003, 68: 026102.
GE H X, ZHU H B, DAI S Q. Effect of looking backward on traffic flow in a cooperative driving car following model [J]. The European Physical Journal B, 2006, 54: 503–507.
SUN D H, LIAO X Y, PENG G H. Effect of looking backward on traffic flow in an extended multiple car-following model [J]. Physica A, 2011, 390(4): 631–635.
YANG D, PETER J, PU Y, RAN B. Safe distance car-following model including backward-looking and its stability analysis [J]. The European Physical Journal B, 2013, 86(3): 86–92.
PETER J, YANG D, RAN B, PU Y. Bi-directional control characteristics of general motors (GM) and optimal velocity car-following models: Implications for coordinated driving in connected vehicle environment [J]. Journal of the Transportation Research Board, 2013, 2381(1): 110–119.
TANG T Q, LI C Y, HUANG H J, SHANG H Y. Macro modeling and analysis of traffic flow with road width [J]. Journal of Central South University of Technology, 2011, 18(5): 1757–1764.
ZHANG H M. Analyses of the stability and wave properties of a new continuum traffic theory [J]. Transportation Research Part B, 1999, 33: 399–415.
JIANG R, WU Q S, ZHU Z J. A new continuum model for traffic flow and numerical tests [J]. Transportation Research Part B, 2002, 36: 405–419.
WILSON R E. Mechanisms for spatiotemporal pattern formation in highway traffic models [J]. Philosophical Transactions of the Royal Society Part A, 2008, 366: 2017–2032.
WILSON R E, WARD J A. Car-following models: fifty years of linear stability analysis — A mathematical perspective [J]. Transportation Planning and Technology, 2011, 34(1): 3–18.
KONISHI K, KOKAME H, HIRATA K. Decentralized delayed-feedback control of an optimal velocity traffic model [J]. The European Physical Journal B, 2000, 15: 715–722.
ZHAO X M, GAO Z Y. Controlling traffic jams by a feedback signal [J]. The European Physical Journal B, 2005, 43(4): 565–572.
ZHENG L, MA S F, ZHONG S Q. Influence of lane change on stability analysis for two-lane traffic flow [J]. Chinese Physics B, 2011, 20(8): 088701.
ZHENG L, ZHONG S Q, MA S F. Controlling traffic jams on a two-lane road using delayed-feedback signals [J]. Journal of Zhejiang University: Science A, 2012, 13(8): 620–632.
JIN Y F, HU H Y. Stabilization of traffic flow in optimal velocity model via delayed-feedback control [J]. Commun Nonlinear Sci Numer Simulat, 2013, 18: 1027–1034.
LIANG C Y, PENG H. Optimal adaptive cruise control with guaranteed string stability [J]. Vehicle System Dynamics, 1999, 31: 313–330.
LIANG C Y, PENG H. String stability analysis of adaptive cruise controlled vehicles [J]. JSME International Journal Series C, 2000, 43(3): 671–677.
BOSE A, IOANNOU P. Analysis of traffic flow with mixed manual and semiautomated vehicles [J]. IEEE Transactions on Intelligent Transportation Systems, 2003, 4(4): 173–188.
ZHOU J, PENG H. Range policy of adaptive cruise control vehicles for improved flow stability and string stability [J]. IEEE Transactions on Intelligent Transportation Systems, 2005, 6(2): 229–237.
NAUS G J L, VUGTS R P A, PLOEG J, VAN DE MOLENGRAFT M J G, STEINBUCH M. String-stable CACC design and experimental validation: A frequency-domain approach [J]. IEEE Transactions on Vehicular Technology, 2010, 59(9): 4268–4279.
Author information
Authors and Affiliations
Corresponding author
Additional information
Foundation item: Projects(51108465, 71371192) supported by the National Natural Science Foundation of China; Project(2014M552165) supported by China Postdoctoral Science Foundation; Project(20113187851460) supported by Technology Project of the Ministry of Transport of China
Rights and permissions
About this article

Cite this article
Zheng, L. Detailed string stability analysis for bi-directional optimal velocity model. J. Cent. South Univ. 22, 1563–1573 (2015). https://doi.org/10.1007/s11771-015-2673-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11771-015-2673-9