
Abstract
In this paper, a novel composite control, using fuzzy logic system (FLS) and disturbance observer, is proposed for a class of uncertain nonlinear systems with actuator saturation and external disturbances. FLS is employed to approximate the unknown nonlinearities and a serial–parallel identification model is introduced to construct the composite updating law. The disturbance observer is developed to estimate the unknown compounded disturbance composed of the unknown external disturbance, the unknown fuzzy approximation error and the effect of actuator saturation. The uniformly ultimate boundedness of the closed-loop tracking error can be guaranteed rigorously via Lyapunov stability analysis. Simulation results are presented to demonstrate the effectiveness of the proposed method.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Owing to the excellent function approximation ability of neural networks (NNs) [25] or FLS [20], intelligent systems are employed for analysis and controller design. The tremendous advantage of designing a control system using NNs or FLS is that it does not require an exact mathematical model of the controlled system [19]. Numerous designs have been proposed for different kinds of systems such as the strict-feedback system [14], single-input–single-output (SISO) pure-feedback system [13], multi-input–multi-output (MIMO) uncertain and perturbed system [9] and the chaotic systems [15, 16].
In practice, systems are subjected to unknown time-varying external disturbance [2, 11, 26]. In [2], linear parameter-varying systems with matched disturbance are studied. For nonlinear systems, in [1, 27, 28], the controller design is with system decomposition and sliding mode. Recently, the disturbance observer-based controller is gaining more and more attention as it is argued [4] that if the observer dynamics is much faster than the system dynamics, to a large extent, the influence of uncertainties can be estimated and compensated for. In [11], a discrete-time fuzzy disturbance observer (FDO) is developed to monitor the total disturbance including the internal parameter uncertainties and the external disturbance. In [6], both state feedback and output feedback designs for the nonaffine system are presented. It is noted that time-varying disturbance cannot be approximated directly by NNs or FLS.
Also physical actuators in control systems have amplitude and rate limitations [8, 30]. The controller ignoring actuator limitations may cause the closed-loop system performance to degenerate or even make the closed-system unstable. Command filter design is proposed for controller design of the related hypersonic flight dynamics with actuator saturation [22, 24]. In [7], adaptive tracking control is proposed for a class of uncertain MIMO nonlinear systems with input constraints. In [29], asymptotic tracking control is investigated for discrete-time MIMO system with nonlinear uncertainties. In [6], the saturation is considered as part of compounded disturbance and the adaptive design is proposed with disturbance observer.
In the above-mentioned methods, most efforts have been directed toward one goal: achieving asymptotic stability and tracking. Little attention has been paid to the accuracy of the desired identified models and to the transparency and the interpretability, whereas there should be the key aspects motivating the use of intelligent approximation in adaptive control. In [10], the fuzzy approximation modeling error is included in the updating law of the parameter estimation where faster state tracking and better parameter convergence were achieved due to the quicker and smoother parameter adaption. However, the method is impractical in real-world applications since the nth derivative of the plant output is required to be known. In [23], the composite design is proposed for a class of strict-feedback systems. Furthermore, similar design is proposed in [17] and applied on Lorenz system [16]. However, in [16, 17], the disturbance is considered as part of uncertainty to be approximated by FLS and the theoretical analysis is not rigorous.
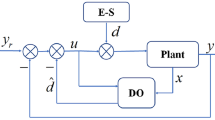
In this paper, we study disturbance observer-based composite fuzzy control (DOBCFC) of a class of uncertain nonlinear systems with both actuator saturation and time-varying disturbance. The external disturbance, the fuzzy approximation errors and actuator saturation effect are integrated as a compounded disturbance. The new serial–parallel identification model is developed with disturbance observer to provide additional approximation error information for FLS weights updating. Semiglobal uniform boundedness stability is rigourously established using Lyapunov approach.
The paper is organized as follows. In Sect. 2, the class of SISO nonlinear systems is characterized and the brief introduction of FLS is given. In Sect. 3, the composite fuzzy control is designed and the stability analysis is presented. The effectiveness of the proposed approach is verified by simulation in Sect. 4. The final conclusion is included in Sect. 5.
2 Problem formulation and preliminaries
2.1 Problem formulation
Consider the nth-order nonlinear system of the controllability canonical form
where \({\bar{\xi }}_n=[\xi _1,\xi _2,\ldots ,\xi _n]^\mathrm{T} \in \mathfrak {R}^n\) are system states which are assumed to be available for measurement, \(f\) and \(g\) are unknown real continuous functions (in general nonlinear), \(y \in \mathfrak {R}\) is system output, \(u\in \mathfrak {R}\) is system input, \(|u|\le u_{\max }, |{\dot{u}}| \le v_{\max }\) and \(d(t)\in \mathfrak {R}\) denotes the external disturbance.
For system (1) to be controllable, it requires that \(g\ne 0\) for all \({\bar{\xi }}_n\) in a certain controllability region \(U_c \subset \mathfrak {R}^n\).
Assumption 1
There exist unknown bound functions \({\bar{f}}({\bar{\xi }}_n), {\bar{g}}({\bar{\xi }}_n)\) and constants \({\underline{g}}, {\bar{d}}\) such that \(|f(\bar{\xi }_n)|\le |\bar{f}(\bar{\xi }_n)|, 0<\underline{g}\le |g(\bar{\xi }_n)|\le |\bar{g}(\bar{\xi }_n)|, |d(t)|\le \bar{d}, |\dot{d}(t)|\le \bar{v}_{d}\).
Assumption 2
The system nonlinearities \(f\) and \(g\) satisfy
where \(w_f^L, w_f^u, w_g^L, w_g^u\) are the bounds of fuzzy weight vector.
The control objective is to synthesize an adaptive fuzzy control \(u\) for system (1), such that all signals in the closed-loop systems are bounded, and the output \(\bar{\xi }_n(t)\) tracks a bounded reference trajectory \(\bar{y}_d(t)=[y_d(t), \dot{y}_d(t),\ldots , y^{(n-1)}_d(t)]^\mathrm{T}\).
2.2 Preliminaries
In this paper, the applied FLS [21] is employed to approximate the unknown nonlinearity \(f\).
where \({{X}_{\text {in}}}\in D \subset {{\mathfrak {R}}^{M}}\) is the input vector of the FLS, \(D=\varOmega _{x_1}\times \varOmega _{x_2} \times \cdots \times \varOmega _{x_M}\) is a fuzzy approximation region, \({\hat{f}} \in \mathfrak {R}\) is the FLS output, \({\hat{{w}}} \in {{\mathfrak {R}}^{L_N}}\) is the adjustable parameter vector, \(\theta (\cdot ):{{\mathfrak {R}}^{M}}\rightarrow {{\mathfrak {R}}^{L_N}}\) is a nonlinear vector function of the inputs and the elements in \(\theta ({{X}_\mathrm{in}})\) are given by
where \({{A}_{i}^l}\) is the fuzzy partitions on \(\varOmega _{x_i}\) and \(\mu _{A_i^l}\) is the membership function of \({{A}_{i}^l}\). In this paper, we select the Gaussian functions with the form
where \(a_i^l\) and \(b_i^l\) denote the centers and widths of \(\mu _{A_i^l}\), respectively.
For any given real continuous function \(f\) on a compact set \({{\varOmega }_{{{X}_\mathrm{in}}}}\in {{\mathfrak {R}}^{M}}\) and an arbitrary \({\varepsilon }_{M}>0\), there exist FLS in the form of (7) and an optimal parameter vector \({{w}^{*}}\) such that
where \({{\varepsilon }_{M}}>0\) denotes the supremum value of the reconstruction error \(\varepsilon \) that is inevitably generated.
3 Composite fuzzy controller design
Considering system (1), if the nonlinearities \(f\) and \(g\) are known, the constraints on control inputs can be ignored, and there is no disturbance, then based on dynamic inversion algorithm, the control law is designed as
where \(e=e(t)\,\triangleq \,y_d(t)-y(t)\in \mathfrak {R}\) is the tracking error, \({\bar{e}}={\bar{e}}(t)\,\triangleq \,[e, {\dot{e}}, \ldots , e^{(n-1)}]^\mathrm{T} \in \mathfrak {R}^n\) and \(\bar{k}=[k_n, \ldots , k_2, k_1]^\mathrm{T} \in \mathfrak {R}^n\) is chosen such that the polynomial \(s^n+k_1 s^{n-1}+ \cdots + k_n=0\) is Hurwitz.
The error dynamics can be derived as
This implies that starting from any initial conditions, the asymptotically stable tracking is achieved.
Since the nonlinear functions \(f,g\) are unknown while there exists time-varying disturbance \(d(t)\) , the controller (9) cannot be implemented.
The last equation of (1) can be written as
where \(w_f^{*}, w_g^{*}\) are the optimal FLS weight vectors approximating \(f, g\) separately, and \(|\varepsilon _f(\bar{\xi }_n)|\le \bar{\varepsilon }_f, |\varepsilon _g(\bar{\xi }_n)|\le \bar{\varepsilon }_g\).
Remark 1
It is easy to see that \(D(t)\) is a compounded disturbance with different effects of fuzzy approximation error, actuator saturation and time-varying disturbance. Similar to the analysis in [6], following the boundedness of
where \(v_{c\max }\) is an unknown positive constant. From Assumption 1, we know there exists upper bound of the derivative of \(D\)
where \(v_D\) is an unknown positive constant.
Assumption 3
[12] The parameter vectors \({\hat{w}}_f\) and \({\hat{w}}_g\) belong to compact \(\varOmega _f\) and \(\varOmega _g\), respectively, which are defined as \(\varOmega _f=\{\hat{w}_f: \Vert \hat{w}_f\Vert \le M_f\}\) and \(\varOmega _g=\{\hat{w}_g: \Vert \hat{w}_g\Vert \le M_g\}\), where \(M_f, M_g \in \mathfrak {R}^+\) are user-defined finite constants.
Define
and \(B=[0, \ldots , 0, 1]^\mathrm{T}\).
We propose the following indirect composite fuzzy controller with adaptive item \(u_a\) and \(H^{\infty }\) term \(u_h\)
where
with \(\hat{D}(t)\) as the estimate of disturbance \(D(t)\) to be designed later and
with \(u_{h0}=-\dfrac{1}{r}B^\mathrm{T}P\bar{e}, r\) is positive constant and matrix \(P=P^\mathrm{T} \ge 0\) is the solution of the following Riccati-like equation
where \(Q\) is an arbitrary \(n\times n\) positive definite symmetric matrix to be given.
The real control input \(u\) is applied
where \(\text {sgn}(\cdot )\) is the sign function.
Remark 2
The saturation effect is considered as part of \(D(t)\). Similar to the idea in [6], the main focus is on the design of disturbance observer and there is no need to construct the auxiliary system as [5, 22].
Subtracting (11) from (20), the error dynamics is obtained
where \(\tilde{D}=D-\hat{D}\).
We know \(\varLambda \) is a stable matrix from the selection of \(\bar{k}\) in (9). Then, there exists a unique positive definite symmetric \(n\times n\) matrix \(P\) that satisfies the Lyapunov equation
To achieve the composite adaption, we define the filtered modeling error
and introduce the following serial–parallel identification model with a low-pass filter
where \(\hat{\xi }_i\) is the estimation of \(\xi _i, \alpha _f \in \mathfrak {R}\) is positive design constant.
The parameter adaptive laws are proposed with both tracking error and filtered modeling error
where \(\gamma _f, \gamma _g\) and \(\gamma _{\xi }\) are positive design parameters.
From (23), the error dynamics of \(\zeta _f\) is obtained as
For the estimation of \(D(t)\), an auxiliary variable is introduced as
where \(k_d>0\) is the design parameter.
Considering (27) and (28), the derivative of \(z\) can be written as
The estimate of intermediate variable \(z\) is given by
where \(\hat{z}\) is the estimation of \(z\).
From (28), the estimation of \(D(t)\) can be written as
Define \(\tilde{z}=z-\hat{z}\) and we have
Differentiating (32) and considering (28), (30) yields
Remark 3
Since the information of time-varying disturbance is included in (24), the estimate is with information of \(\zeta _f\) and there is no need to construct the \(\hat{z}\) as [4, 6].
Remark 4
The \(H^{\infty }\) fuzzy controller (FC) \(u_1^{C}\) in [3] has the following formulation
where \(u_a^C=\dfrac{1}{\hat{g}}[-\hat{f}+y_d^{(n)}(t)+\bar{k} \bar{e}]\) and \(u_h^C=u_h\). The difference between the controller in this paper and \(H^{\infty }\) FC (34) lies in the disturbance observer (31) and the updating law (25) and (26).
Remark 5
Recently, disturbance observer-based controller design is commonly studied and the design origins from the dynamics of \(\xi _n\). The controller is simply presented as follows:
where \(u_h^D=u_h, u_a^D=\dfrac{1}{\hat{g}}[-\hat{f}+y_d^{(n)}(t)+\bar{k} \bar{e}-{\hat{D}}_d], {\hat{D}}_d={\hat{z}}_D+k_d^D e^{(n-1)}\), and
with \(k_d^D\) as the positive design parameter.
In this paper, the composite design is developed using serial–parallel identification model (24) and the disturbance observer is constructed based on the filtered modeling error \(\zeta _f\).
Now, we have the following theorem.
Theorem 1
For the nonlinear system (1), satisfying Assumptions 1–3, select (19) from (15) as the tracking controller, (25) and (26) as updating algorithm and (31) as compounded disturbance observer. Then, all the closed-loop system signals are semiglobally uniformly ultimately bounded (UUB) under the proposed disturbance-based fuzzy controller.
Furthermore, the tracking error and the filtered modeling error remain within the following compact
and the \(H_\infty \) tracking performance can be obtained
Proof
Consider the following Lyapunov function candidate
The time derivative of \(V\) is
Furthermore, we know
Similar to the analysis of the proof [18], we know
where \(k_{\min }=\dfrac{\lambda _{\min }(Q)}{\lambda _{\max }(P)}\) and \(V_r \in \mathfrak {R}^+\) is a finite constant. Then, we know all the signals are UUB.
From the bound of \(\dot{D}\) and Assumption 2, we know
Furthermore, \(\bar{e}\) and \(\zeta _f\) converge to the compact
Similarly, we can prove the disturbance estimation error \(\tilde{D}\) and the error of FLS weights \(\tilde{w}_f, \tilde{w}_g\) are bounded.
From (42), we know
Integrating both sides of the above inequality (45) from 0 to \(T\) yields
Then, the conclusion of (39) could be obtained. This completes the proof.\(\square \)
Remark 6
Since there exist input saturation and time-varying disturbance, the compensating design for \(D(t)\) is employed, while the composite learning with modeling error is designed.
Remark 7
The disturbance observer design (31) with (30) is different from the design in [6] because the filtered modeling error (23) is incorporated.
Remark 8
The composite learning (25) and (26) is different from the design in [18] since the disturbance is estimated and included in the identification model (24).
Remark 9
It is obvious that the controller can be applied without any change for the case free of actuator saturation.
Remark 10
From the derivative of the Lyapunov function \(V\) in (42), if without the item \(u_a\), the conclusion of Theorem 1 still exists. However, with the item \(u_{h0}\), one item \(\dfrac{(\bar{e}^\mathrm{T}\textit{PB})^2}{2\rho ^2}\) is subtracted from \(\dot{V}\) and it makes the Lyapunov function decreasing faster.
4 Simulation
In this section, the following second-order nonlinear inverted pendulum system [3] is used for simulation
where
and \(\xi _1\) is the angular position of the pendulum, \(\xi _2\) is the corresponding angular velocity, \(g_\mathrm{e}=9.8\) m/s\(^{2}\) is the acceleration due to gravity, \(m_\mathrm{c}\) is the mass of the cart, \(m\) is the mass of the pole and \(l\) is the half length of the pole.

Tracking of \(y_d\)

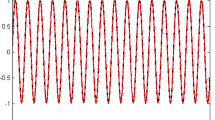
Reference signal \(\xi _{2d}\) and system output \(\xi _{2}\)

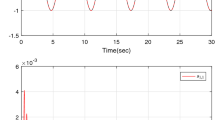
Tracking errors
The controller in this paper is denoted as DOBCFC, while the design in (34) is marked as \(H^{\infty }\)FC, and the controller (35) is named as disturbance observer-based fuzzy control (DOB-FC). For simulation, \(m_\mathrm{c}=1\) kg, \(m=0.1\) kg, \(l=0.5\) m, \(\bar{\xi }_2(0)=[0,\pi /12]^\mathrm{T}\).
Let \(k_1=2, k_2=1, \gamma _f=30, \gamma _g=1.5, \gamma _\xi =10\). Select \(Q=\left[ \begin{array}{cc} 10 &{} 0\\ 0&{} 10 \\ \end{array} \right] , \rho =0.1, r=2\rho ^2, P=\left[ \begin{array}{cc} 15 &{} 5\\ 5&{} 5 \\ \end{array}\right] \).

Estimation of the compound disturbance

Components of control input
For the FLS, \(\hat{w}_f(0)=[0,\ldots ,0]^\mathrm{T}, \hat{w}_g(0)=[0.5,\ldots ,0.5]^\mathrm{T}, a_i^l, i=1,2\) is selected as \([-\pi /6; -\pi /12;0;\pi /12;\pi /6], b_i^l=0.1, L_{N}=25, M_f=10, M_g=1\).
4.1 Period signal tracking without input saturation
The control objective is to ensure that the output \(y\) tracks \(y_d=\pi /6\sin t\) with \(d(t)=5\sin t\). Accordingly, we know \(\xi _{2d}=\dot{y}_d=\pi /6\cos t\). The parameter is \(k_d=0.1\), \(\alpha _f = 2\) and in this example, to clearly show the difference between DOBCFC and \(H^{\infty }\)FC, the input saturation is not considered.
The simulation results are shown in Figs. 1, 2, 3, 4 and 5. From the system tracking depicted in Fig. 1, it is observed that both controllers can follow the reference trajectory \(y_d\), but the result of DOBCFC is with higher tracking precision. From the tracking of \(x_{2d}\) in Fig. 2 similar conclusion can be obtained. The deduction could be further confirmed from the tracking errors shown in Fig. 3. The estimation of disturbance observer is presented in Fig. 4. In Fig. 5, the robust item \(u_h(t)\) of DOBCFC is with smaller value compared with \(H^{\infty }\)FC. It means that \(H^{\infty }\)FC is mainly relying on the \(H^{\infty }\) term, while for DOBCFC, the basic adaptive fuzzy controller \(u_a(t)\) plays more important roles. It indicates that the more controller could adapt to the system uncertainty and disturbance, the higher precision could be obtained.
4.2 Square signal tracking with input saturation
The control objective is to ensure that the output \(y\) tracks the square command with period 60 s and magnitude \(\pi /6\). The saturation is considered as \(|u|\le 6.5\), and control parameters are selected as \(k_d=0.2, \alpha _f = 15, k_d^D=0.5\). In this example, three methods are tested on the same scenario and the disturbance is set with a sudden change during the steady state
The filter (49) is used to derive the reference signals \(y_d, \dot{y}_d\) and \(\ddot{y}_d\).
where \(w_n=0.9, \varepsilon _c=0.9\).

Tracking of \(y_d\)

Tracking error of \(y_d\)

Reference signal \(\xi _{2d}\) and system output \(\xi _2\)

Tracking error of \(\xi _{2d}\)

Control input

Estimation of the compound disturbance
The simulation results are shown in Figs. 6, 7, 8, 9, 10 and 11. From the system response depicted in Figs. 6 and 8, under DOBCFC the tracking errors in Figs. 7 and 9 converge to the neighborhood of zero faster with higher precision. It is obvious that compared with the other two methods, DOBCFC exhibits better performance even with sudden disturbance (at \(t=20\) s) or reference command change (at \(t=30\) s). It is observed that initially since the system is not at trim state, there exists large variation for system tracking, while for steady state, the amplitude of tracking error is smaller when there comes sudden disturbance or new tracking command. Due to the compounded disturbance estimation and effect of the input saturation, it is interesting to find that the control input of DOBCFC exhibits quite different response from \(H^{\infty }\)FC and DOB-FC as shown in Fig. 10. Also from the response shown in Figs. 10 and 7, in case of reference command change, DOBCFC is with smaller control input and better transient performance. Though DOBCFC and DOB-FC are both equipped with disturbance observer, the estimation in Fig. 11 is quite different and the reason is discussed as in Remark 5.
5 Conclusion
In this paper, a novel composite fuzzy control is proposed for a class of uncertain nonlinear systems with actuator saturation and external disturbances. FLS is employed to approximate the unknown nonlinearities and a serial–parallel identification model is introduced to construct the composite fuzzy updating law. The disturbance observer is developed to estimate the unknown compounded disturbance composed of the unknown external disturbance, the unknown fuzzy approximation error and the actuator saturation effect. The uniformly ultimate boundedness of the closed-loop tracking error can be guaranteed rigorously via Lyapunov stability analysis. The simulation results verify the philosophy of the controller design in this paper using composite design with disturbance observer to enhance the tracking performance.
References
Bayramoglu, H., Komurcugil, H.: Time-varying sliding-coefficient-based terminal sliding mode control methods for a class of fourth-order nonlinear systems. Nonlinear Dyn. 73(3), 1645–1657 (2013)
Bum Yong Park, S.W.Y., Park, P.: \(H_2\) state-feedback control for lpv systems with input saturation and matched disturbance. Nonlinear Dyn. 67(2), 1083–1096 (2012)
Chen, B., Lee, C., Chang, Y.: \(H^{\infty }\) tracking design of uncertain nonlinear SISO systems: adaptive fuzzy approach. IEEE Trans. Fuzzy Syst. 4(1), 32–43 (1996)
Chen, M., Chen, W.: Sliding mode control for a class of uncertain nonlinear system based on disturbance observer. Int. J. Adapt. Control Signal Process. 24(1), 51–64 (2010)
Chen, M., Ge, S., How, B.: Robust adaptive neural network control for a class of uncertain MIMO nonlinear systems with input nonlinearities. IEEE Trans. Neural Netw. 21(5), 796–812 (2010)
Chen, M., Ge, S.S.: Direct adaptive neural control for a class of uncertain nonaffine nonlinear systems based on disturbance observer. IEEE Trans. Cybern. 43(4), 1213–1225 (2013)
Chen, M., Ge, S.S., Ren, B.: Adaptive tracking control of uncertain mimo nonlinear systems with input constraints. Automatica 47(3), 452–465 (2011)
Farrell, J., Sharma, M., Polycarpou, M.: Backstepping-based flight control with adaptive function approximation. J. Guid. Control Dyn. 28(6), 1089–1102 (2005)
Hamzaoui, A., Essounbouli, N., Benmahammed, K., Zaytoon, J.: State observer based robust adaptive fuzzy controller for nonlinear uncertain and perturbed systems. IEEE Trans. Syst. Man. Cybern. Part B Cybern. 34(2), 942–950 (2004)
Hojati, M., Gazor, S.: Hybrid adaptive fuzzy identification and control of nonlinear systems. IEEE Trans. Fuzzy Syst. 10(2), 198–210 (2002)
Kim, E.: A discrete-time fuzzy disturbance observer and its application to control. IEEE Trans. Fuzzy Syst. 11, 399–410 (2003)
Kung, C., Chen, T.: Observer-based indirect adaptive fuzzy sliding mode control with state variable filters for unknown nonlinear dynamical systems. Fuzzy Sets Syst. 155(2), 292–308 (2005)
Li, Y., Tong, S.: Adaptive fuzzy output-feedback control of pure-feedback uncertain nonlinear systems with unknown dead-zone. IEEE Trans. Fuzzy Syst. doi:10.1109/TFUZZ.2013.2280146
Liu, Y., Chen, C., Wen, G., Tong, S.: Adaptive neural output feedback tracking control for a class of uncertain discrete-time nonlinear systems. IEEE Trans. Neural Netw. 22(7), 1162–1167 (2011)
Liu, Y.J., Zheng, Y.Q.: Adaptive robust fuzzy control for a class of uncertain chaotic systems. Nonlinear Dyn. 57(3), 431–439 (2009)
Pan, Y., Er, M.J., Sun, T.: Composite adaptive fuzzy control for synchronization of generalized lorenz systems. Chaos 22(2), 1–10 (2012)
Pan, Y., Zhou, Y., Sun, T., Joo Er, M.: Composite adaptive fuzzy \(H^{\infty }\) tracking control of uncertain nonlinear systems. Neurocomputing 99, 15–24 (2013)
Phan, P.A., Gale, T.: Two-mode adaptive fuzzy control with approximation error estimator. IEEE Trans. Fuzzy Syst. 15(5), 943–955 (2007)
Tong, S., He, X., Zhang, H.: A combined backstepping and small-gain approach to robust adaptive fuzzy output feedback control. IEEE Trans. Fuzzy Syst. 17(5), 1059–1069 (2009)
Tong, S.C., Li, Q., Chai, T.: Fuzzy adaptive control for a class of nonlinear systems. Fuzzy Sets Syst. 101(1), 31–39 (1999)
Wang, L.: Design and analysis of fuzzy identifiers of nonlinear dynamic systems. IEEE Trans. Autom. Control 40(1), 11–23 (1995)
Xu, B., Huang, X., Wang, D., Sun, F.: Dynamic surface control of constrained hypersonic flight models with parameter estimation and actuator compensation. Asian J. Control 16(1), 162–174 (2014)
Xu, B., Shi, Z., Yang, C., Sun, F.: Composite neural dynamic surface control of a class of uncertain nonlinear systems in strict-feedback form. IEEE Trans. Cybern. 14(12), 2626–2634 (2014)
Xu, B., Shi, Z., Yang, C., Wang, S.: Neural control of hypersonic flight vehicle model via time-scale decomposition with throttle setting constraint. Nonlinear Dyn. 73(3), 1849–1861 (2013)
Xu, B., Yang, C., Shi, Z.: Reinforcement learning output feedback nn control using deterministic learning technique. IEEE Trans. Neural Netw. Learn. Syst. 25(3), 635–641 (2014)
Yang, J., Li, S., Sun, C., Guo, L.: Nonlinear-disturbance-observer-based robust flight control for airbreathing hypersonic vehicles. IEEE Trans. Aerosp. Electron. Syst. 49(2), 1263–1275 (2013)
Yorgancioglu, F., Komurcugil, H.: Single-input fuzzy-like moving sliding surface approach to the sliding mode control. Electr. Eng. 90(3), 199–207 (2008)
Yorgancioglu, F., Komurcugil, H.: Decoupled sliding-mode controller based on time-varying sliding surfaces for fourth-order systems. Expert Syst. Appl. 37, 6764–6774 (2010)
Yang, C., Zhai, L., Ge, S.S., Chai, T., Lee, T.H.: Adaptive model reference control of a class of MIMO discrete-time systems with compensation of nonparametric uncertainty, American Control Conference, 4111–4116 (2008)
Li, Z., Yang, C., Ding, N., Bogdan, S., Ge, T.: Robust adaptive motion control for underwater remotely operated vehicles with velocity constraints, Int. J. Control Autom. Syst. 10 (2), 421–429 (2012)
Acknowledgments
This work was supported by the National Science Foundation of China (Grants Nos.: 61304098, 61134004, 61473120), Natural Science Basic Research Plan in Shaanxi Province (Grant No.: 2014JQ8326) and State Key Laboratory of Robotics and System (HIT) grant SKLRS-2014-MS-05.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Xu, B., Shi, Z. & Yang, C. Composite fuzzy control of a class of uncertain nonlinear systems with disturbance observer. Nonlinear Dyn 80, 341–351 (2015). https://doi.org/10.1007/s11071-014-1872-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-014-1872-5