
Abstract
This paper proposes a robust sliding mode control strategy for an uncertain nonlinear system subjected to time-varying disturbance. The class of system considered includes state-dependent nonlinearity in the input vector (in addition to the plant matrix). The control scheme uses inertial delay control to estimate the lumped uncertainty. The proposed control enforces sliding without using the discontinuous control and without requiring the knowledge of uncertainties or their bounds. The overall stability of the system is proved. The effectiveness of the proposed strategy is verified for model following and robust performance, by simulation of an illustrative example and an application to inverted pendulum system.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Robust control is concerned with control performance in the presence of uncertainties, external disturbances, and plant parameter variations. Sliding mode control (SMC) is one such strategy that has matured into an effective technique for controlling uncertain systems [1, 2].
The current sliding mode strategies are concerned mostly with systems that are linear in the input. This formulation restricts the application potential of SMC. Under this formulation, systems with an input nonlinearity are usually approached by introducing a coordinate transformation [1, 3] or exact linearization [4]. The robustness, however, is a concern and may result in performance degradation and in some cases even in instability. A modified sliding condition combined with equivalent control [5] can improve robustness. An adaptive robust finite-time controller [6] is introduced for synchronization of two different uncertain chaotic systems (master-slave) with input nonlinearities. The control, however, is discontinuous and requires the bounds of uncertainty.
The uncertain parameters [7] or the bounds of uncertainties [8] can be estimated adaptively and combined with SMC for robust performance. The robustness is also achieved by adaptively estimating the uncertainties using fuzzy and neural network [9–11]. The adaptive estimation algorithms can effectively take care of structured uncertainties; however, sensor errors or accumulation of numerical errors may lead the system toward instability [12].
A control design augmented by the estimates of uncertainties and disturbances can effectively alleviate the problem. In this design, the effect of uncertainties is compensated by augmenting the controller designed for nominal system with the estimates. Techniques like unknown input observer (UIO) [13], perturbation observer (PO) [14], disturbance observer (DO) [15], extended state observer (ESO) [16], and time delay control (TDC) [17] have been in place for quite sometime, to estimate the effects of uncertainties and disturbances. These techniques have been efficiently used in robustifying the control for nonlinear systems [18] and uncertain chaotic systems [19]. An application of TDC for DC servo motor control [20] is also reported.
The uncertainty and disturbance estimator (UDE)[21] (redefined as inertial delay control (IDC) as explained in Remark 3) is an effective technique for estimating slow-varying uncertainties. This method has been applied to SMC of linear systems [22], linear and nonlinear systems with state delays [23, 24], and input-output linearization [25].
In this paper, sliding mode control (SMC) combined with IDC is extended to a matched uncertain system with control appearing through a nonlinear function as in [5, 26]. This formulation appears in many practical applications like motion control [27], magnetic levitation [4, 9] underwater vehicles [28], vehicle control [29], and underactuated systems [30]. The robustness is assured through IDC that estimates the lumped uncertainty comprising uncertainty in plant as well as input matrix and unknown disturbance. The developed strategy is applied to a representative nonlinear second-order example as in [20] and a benchmark inverted pendulum problem [31]. The main contributions of this paper are as follows:
-
(i)
The system considered here covers a large class of practical applications.
-
(ii)
The proposed method does not require any knowledge of the bounds of uncertainties and disturbances.
-
(iii)
The method of IDC is extended to uncertain system, with nonlinearity in the input vector (in addition to the uncertainty in the plant matrix) and state-dependent disturbances.
-
(iv)
The ultimate boundedness of estimation error (\(\tilde{e}\)) and the sliding variable (\(\sigma \)) is proved and validated by simulation of a numerical example and a practical application.
The paper is organized as follows: Sect. 2 states the problem with the necessary assumptions. Section 3 explains the design of model following control followed by uncertainty estimation in Sect. 4. Section 5 gives the stability analysis. The performance is illustrated by a numerical example in Sect. 6 followed by an application to inverted pendulum system in Sect. 7 and conclusion in Sect. 8.
2 Problem statement
Consider a nonlinear single input, single output uncertain system given by,
-
\(x\) \(\in \) \(\mathbb {R}^n\) is the state vector
-
\(u\) \(\in \) \(\mathbb {R}^1\) is the control input
-
\(f(x,t)\) is known nonlinear system vector
-
\(g (x,t)\) is known nonlinear input vector
-
\(\Delta f(x,t)\) & \(\Delta g(x,t)\) are uncertainties in plant and input vector, respectively
-
\(d(x,t)\,\in \,\mathbb {R}^n\) is the unmeasurable disturbance
Assumption 1
The uncertainties \(\Delta f(x,t), \Delta g(x,t)\), and disturbance \(d(x,t)\) satisfy the matching conditions given by
where \(e_f,\, e_g\), and \(e_d\) are unknown.
The Eq. (2) is the well-known matching condition required to guarantee invariance and is an explicit statement of the structural constraint stated in [32]. Using the Assumption 1, the uncertainty and disturbances can be combined into a lumped uncertainty term \(e(x,u,t)\,\in \,\mathbb {R}^1\) and is given as
The system (1) can now be rewritten as
Assumption 2
The lumped uncertainty \(e(x,t)\) is continuous and satisfies
where \(\mu \) is a small positive number.
Remark 1
The Assumption 2 implies that the uncertainty \(e(x,u,t)\) and its derivatives up to some finite order (\(r\)) be bounded but the bound is not required to be known. The assumption includes a fairly large class of uncertainties and disturbances that can be estimated by inertial delay control (IDC) described in Sect. 4.
A model following control is to be designed for the uncertain plant (4), such that it follows the desired model given by
where \(x_m\,\in \,\mathbb {R}^n\) is the model state, \(u_m\,\in \,\mathbb {R}^1\) is the reference input, and \(A_m\) and \(b_m\) are user selected matrix of suitable dimensions such that (6) gives the desired response. The following assumption is needed on the structure of the model to ensure perfect model following.
Assumption 3
where \(L\) and \(M\) are suitable known matrices of appropriate dimensions.
The objective is to design a control \(u\) such that the uncertain plant (4) follows the desired model (6) inspite of uncertainties and disturbances represented by \(e(x,u,t)\).
3 Design of control
A model following control is designed, based on the sliding surface of Ackermann [33]. The control is designed to ensure sliding and the choice of sliding surface ensures that the system follows the desired model.
3.1 Sliding surface
The sliding surface is defined as
where \(b=[0 \quad 1]^T\). The auxiliary variable \(z\) is defined as
A sliding surface of (8) gives full order sliding and eliminates reaching phase [33]. It can be easily verified that with this sliding surface and auxiliary variable dynamics (9), when \(\sigma \) goes to 0, the plant follows the desired model.
3.2 Model following control
A control is designed such that the sliding condition is satisfied and plant follows the desired model. The control \(u\) is designed as \(u = u_{eq}+u_n\) with \(u_{eq}\) catering to the nominal (known) terms and \(u_n\) to take care of uncertainty in (11). Differentiating (8) and using (4) and (9),
For the sake of simplicity, \(b^Tg(x,t)\) is written as \(b^Tg\).
Let the control \(u\) be expressed as
with
where \(k\) is a positive constant. Using (12) and (13) in (11),
The control strategy is to estimate \(e(x,u,t)\) as \(\hat{e}(x,u,t)\) (18) using inertial delay control (Sect. 4) and use \(-\hat{e}(x,u,t)\) as a component in control to cancel the effect of \(e(x,u,t)\).
Let
with
Remark 2
It is seen from (16) that, as \(\tilde{e} \rightarrow 0\), i.e. \(\hat{e}(x,u,t)\approx e(x,u,t)\), sliding condition is satisfied and \(\sigma \) will asymptotically approach 0, if \(k > 0\). This implies that the uncertain plant follows the desired model i.e., \(\dot{x}=A_m\,x+b_m\,u_m\).
4 Estimation of uncertainty
The uncertainty and disturbance estimator (UDE) [21] is a promising strategy for estimating slow-varying uncertainties. The UDE control algorithm is based on the assumption that a signal can be approximated and estimated using a filter with the right bandwidth. The opposite of estimate is then used in control to negate the effect of the uncertainty [22]. The lumped uncertainty \(e(x,u,t)\) can be estimated as
where \(G_f(s)\) is a strictly proper low-pass filter with unity steady-state gain and sufficiently large bandwidth.
Remark 3
The estimate (\(\hat{e}\)) is obtained by passing lumped uncertainty (\(e\)) through an inertial filter \(G_f(s)\). In analogy with time delay control (TDC) in which the estimates are obtained by delaying the plant signals in time, the method of UDE is redefined as inertial delay control (IDC). The order of estimation filter (\(n\)) shall imply the order (\(n\)) of IDC.
Specifically for a choice of \(G_f(s)\) given by
where \(\tau \) is a small positive constant. The Eq. (20) can be written as
Therefore, with a first-order low-pass filter (i.e., 1st-order IDC),
From Eqs. (17), (18), and (21),
Remark 4
If \(\dot{e}=0\), \(\tilde{e}\) goes to zero asymptotically, otherwise it is ultimately bounded. If \(\dot{e}\) is not small, but \(\ddot{e}\) is small, i.e., \(j=2\) in (5), then the accuracy of estimation can be improved by estimating \(e\) as well as \(\dot{e}\).
4.1 Improvement in estimation: 2nd-order IDC
The uncertainty (\(e\)) and its derivative (\(\dot{e}\)) can be estimated using a second-order filter of the form
where \(\tau \) is a small positive constant. Let \(\hat{e_1}\) be the estimate of \(e(x,u,t)\) and \(\hat{e_2} = \dot{\hat{e_1}}\) be the estimate of \(\dot{e}(x,u,t)\).
The estimation errors are derived using (17)
The estimation error equations can be expressed in the state variable form as
where
Therefore, with a second-order low-pass filter (i.e., 2nd-order IDC),
5 Stability
In this section, it is proved that estimation error (\(\tilde{e}\)) and sliding variable (\(\sigma \)) are ultimately bounded. The stability is analyzed for 2nd-order IDC. From (32) and (33), it is observed that for \(\tau >0\), the eigen values of \(A\) can be placed arbitrarily. If \(\tau \) is selected such that all eigen values of \(A\) have negative real parts, one can always find a positive definite matrix \(P\) such that
for a given positive definite matrix \(Q\). Let \(\lambda \) be the smallest eigen value of \(Q\).
Defining a Lyapunov function as
Taking derivative of \(V(\tilde{e})\) along (24)
Thus, the estimation error (\(\tilde{e}\)) is ultimately bounded by
The bound on \(|\sigma |\) is now determined using (16)
Therefore,
Thus, the sliding variable (\(\sigma \)) is ultimately bounded by
It is seen from (42) and (47) that \(\Vert \tilde{e}\Vert \) and \(|\sigma |\) are ultimately bounded and the bounds can be lowered by appropriate choice of control parameters \(k\) and \(\tau \). Thus, the practical stability is proved in the sense of [34].
6 Numerical example
The effectiveness of the proposed strategy is illustrated with the numerical example as in [20]. The plant dynamics are as in (1) with
The structure of the model to be followed is as in (6) with
The initial conditions for the plant and model are
The disturbance is
6.1 Case 1 : model following
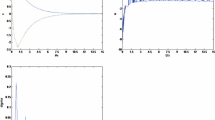
A model following control with uncertainty estimated by a first-order IDC (23) is considered here and the simulation results are showed in Fig. 1. The model parameters are \(\zeta =1\) and \(\omega _n=6\) in (51). The plant and the model have an initial condition mismatch (52). The control gain is \(k=2\) and filter time constant is \(\tau =1\,ms\). The reference input is a square wave of amplitude 1 and frequency 0.9 rad/sec. The response of the plant states (\(x\)), in Fig. 1a, b, shows that the plant follows the model very closely even with uncertainty in plant (49) as well as input vector (50) as also state-dependent nonlinear disturbance (53). The sliding variable (\(\sigma \)) and estimation error (\(\tilde{e}\)) are bounded as seen in Fig. 1d,f.

Model following with uncertainty estimation. a Plant (straight lines) and model (dotted lines) state \(x_1\), b plant (straight lines) and model (dotted lines) state \(x_2\), c control \(u\), d sliding variable \(\sigma \), e uncertainty \(e\) (straight lines) and \(\hat{e}\) (dotted lines), f estimation error \(\tilde{e}\)
6.2 Case 2 : robustness
The robustness analysis with a first-order IDC (23) is presented in this section. The uncertainty in \(f(x,t)\) (49) is same as in Case 1 whereas the uncertainty in \(g(x,t)\) (50) is increased by considering \(g(x,t) = [0 \quad 0.6\sin {x_2}]^T\). The results are shown in Fig. 2. The performance of first-order IDC (23) is also tested for a fast disturbance. The disturbance considered is \(d(x,t)= x_1^2\,\sin {(10\,t)}+x_2\,\cos {(10\,t)}+1\) and the results are shown in Fig. 3. The results are a confirmation of the theory and IDC can indeed compensate fast-varying disturbances and large input vector uncertainties. This implies a good model following and the same is evident from Figs. 2a, b and 3a, b. The sliding variable (\(\sigma \)) and estimation error (\(\tilde{e}\)) are also bounded as expected. It may be noticed that the disturbance has terms that vary in a sinusoidal fashion. As a result, the rate of change of uncertainty \(\dot{e}(x,u,t)\) also has terms that vary in a sinusoidal fashion. Therefore, the estimates \(\hat{e}(x,u,t)\) and \(\tilde{e}\) also show a sinusoidal variation as is to be expected.

Robustness for increased uncertainty in \(g(x,t)\). a Plant (straight lines) and model (dotted lines) state \(x_1\), b plant (straight lines) and model (dotted lines) state \(x_2\), c control \(u\), d sliding variable \(\sigma \), e uncertainty \(e\) (straight lines) and \(\hat{e}\) (dotted lines), f estimation error \(\tilde{e}\)

Robustness for fast disturbance. a Plant (straight lines) and model (dotted lines) state \(x_1\), b plant (straight lines) and model (dotted lines) state \(x_2\). c control \(u\), d sliding variable \(\sigma \), e uncertainty \(e\) (straight lines) and \(\hat{e}\) (dotted lines), f estimation error \(\tilde{e}\)
6.3 Case 3 : improvement with higher order filter
The improvement in accuracy of estimation using a second-order IDC (34) is presented here. The reduction of (\(\sigma \)) and estimation error (\(\tilde{e}\)) in comparison to the results of Case 1 is shown in Fig. 4. It can be seen that the bounds are reduced by a factor of more than 10.

Comparison between first-order and second-order IDC for estimation accuracy. a \(\sigma \) with 1st order filter, b \(\sigma \) with 2nd order filter, c \(\tilde{e}\) with 1st order filter, d \(\tilde{e}\) with 2nd order filter
7 Application to inverted pendulum system
The inverted pendulum system is widely used in the literature to check the validity of control strategies, owing to its challenging dynamic structure. A nonlinear control based on sliding plane [35], adaptive-\(H_{\infty }\) control [36], SMC with QFT [37] are some of the nonlinear designs reported in literature. A SMC combined with self-tuning fuzzy inference scheme [38] provides good tracking performance. However, the control input is very high initially; it is effectively addressed in the proposed design by choice of a suitable sliding surface and auxiliary variable.
The theoretical results of nonlinear sliding mode control design are applied to an inverted pendulum stabilization problem. The stabilization problem is to design a controller to keep the pendulum in its unstable equilibrium point in the presence of disturbances.
The dynamics of the inverted pendulum can be written as in [31, 35].
where \(\left[ x_1 \quad x_2 \right] ^T\) are the state variables—position and velocity of the pole in \(radians\) and \(radians/sec\), \(u(t)\) is the control input in \(V, d(t)\) is the external disturbance and \(y\) is the output. The model parameters are: \(m_c\) is the mass of cart, \(m\) is the mass of pole and \(l\) is half length of the pole.
The system state equations in (54) can be represented generically as
-
\(x\) \(\in \) \(\mathbb {R}^n\) is the state vector
-
\(u\) \(\in \) \(\mathbb {R}^1\) is the control input
-
\(f(x,t)\) is known nonlinear system vector
-
\(g (x,t)\) is known nonlinear input vector
-
\(d(x,t)\) is the unmeasurable disturbances
The nonlinear system and input vector may have uncertainties; \(\Delta f\), \(\Delta g\). As is evident, the uncertainties \(\Delta f, \Delta g\) and disturbance \(\mathrm{d}(x,t)\) satisfy matching conditions. Thus, the system (55) can now be rewritten as in (4),
where \(e(x,u,t)\) is the lumped uncertainty as in (3) comprising uncertainty in plant and input vector as well as unknown disturbance.
A trajectory tracking control with uncertainty estimated by a first-order IDC (23) is considered here and the simulation results are shown in Fig. 5. The reference is \(r(t)=0.2\sin \left( \pi \,t+\frac{\pi }{2}\right) \). The nominal values of model parameters are \(m_c=1\) kg, \(m=0.1\) kg, \(l=0.5\) m. An uncertainty of 50 % is added in \(m\) to check the robustness of control. It is observed from Fig. 5a that the tracking accuracy is good inspite of uncertainties. It may be noted that no disturbance is added for this case.

Inverted Pendulum without disturbance. a Plant output \(y\) (in radians), b control \(u\) (in V), c sliding variable \(\sigma \), d estimation error \(\tilde{e}\)
In the second case, a time-varying disturbance is added to the plant and the trajectory tracking control performance is shown in Fig. 6. The disturbance considered is \(\mathrm{d}(t)=20\sin (2\,\pi \,t)\), with all other parameters same as the previous case. The first-order IDC (23) is able to compensate this time-varying disturbance and the control ensures a good tracking performance and disturbance rejection as seen in Fig. 6a. The plot of \(\tilde{e}\) which is the difference between \(e\) and \(\hat{e}\) is also sinusoidal but bounded.

Inverted Pendulum with disturbance. a Plant output \(y\) (in radians), b control \(u\) (in V), c sliding variable \(\sigma \), d estimation error \(\tilde{e}\)
The choice of sliding surface ensures that the magnitude of control is within limits. The same can be observed from Figs. 5b and 6b for both the cases. The sliding variable (\(\sigma \)) and estimation error (\(\tilde{e}\)) are bounded for both the cases as seen in Figs. 5c, d and 6c, d. The sinusoidal variation in the plot of \(\sigma \) in Fig. 6c is expected because the disturbance \(\mathrm{d}(t)\) has sinusoidal components in it.
The bounds can be lowered using a smaller value of \(\tau \) as seen in Fig. 7. The estimation error (\(\tilde{e}\)) and sliding variable (\(\sigma \)) are bounded and the same is shown for a longer simulation time of 25 s in Fig. 8. The accuracy of estimation is further improved using a second-order filter. The bounds on estimation error (\(\tilde{e}\)) and sliding variable (\(\sigma \)) are further lowered by using a second-order filter as seen in the comparative results shown in Fig. 8a, b, c, d.

Estimation accuracy with different values of \(\tau \). a Estimation error (\(\tilde{e}\)) with \(\tau =1\) ms, b estimation error (\(\tilde{e}\)) with \(\tau =0.1\) ms

Increased robustness with 2nd order filter. a \(\tilde{e}\) with 1st order filter and \(\tau =1\) ms, b \(\sigma \) with 1st order filter and \(\tau =1\) ms, c \(\tilde{e}\) with 2nd order filter and \(\tau =1\) ms, d \(\sigma \) with 2nd order filter and \(\tau =1\) ms
8 Conclusion
In this paper, a robust sliding mode control strategy using IDC is extended to uncertain nonlinear system with nonlinearity in the plant as well as input vector and subjected to time-varying disturbance. The proposed control enforces sliding without using the discontinuous control and without requiring the knowledge of uncertainties or their bounds. The IDC is able to compensate significant uncertainties as well as fast disturbances. The paper proposes an approach for improving the accuracy of estimation to cover a large class of disturbances. It is proved that the ultimate boundedness of uncertainty estimation error and sliding variable is guaranteed, and the bounds can be lowered by appropriate choice of design parameters. The accuracy of estimation is improved using a second-order filter. The theoretically expected results are verified by computer simulation in MATLAB-SIMULINK environment. The efficacy of the design is also confirmed on an application to inverted pendulum system.
References
Decarlo, R.A., Zak, S.H., Matthews, G.P.: Variable structure control of nonlinear multivariable systems: a tutorial. Proc. IEEE 76(3), 212–232 (1988)
Utkin, V.I.: Sliding Mode in Control and Optimization. Springer, Berlin (1992)
Gutierrez, H.M., Rio, P.I.: Parametric modeling and control of a long range actuator using magnetic servo levitation. IEEE Trans. Magn. Part 2 34(5), 3689–3695 (1998)
Molero, R., Roca, J., Separovich, D., Rojas, J., Montes, M., Cuellar, N.: Nonlinear control of an electromagnetic system based on exact linearization and sliding mode control. Mech. Based Des. Struct. Mach. 36, 426–445 (2008)
Gutierrez, H.M., Rio, P.I.: Magnetic servo levitation by sliding-mode control of nonaffine systems with algebraic input invertibility. IEEE Trans. Ind. Electron. 52(5), 1449–1455 (2005)
Aghababa, M.P., Aghababa, H.P.: A general nonlinear adaptive control scheme for finite-time synchronization of chaotic systems with uncertain parameters and nonlinear inputs. Nonlinear Dyn. 69, 1903–1914 (2012)
Slotine, J.J.E., Coetsee, J.A.: Adaptive sliding controller synthesis for non-linear systems. Int. J. Control 43(6), 1631–1651 (1986)
Yoo, D.S., Chung, M.J.: A variable structure control law with simple adaptation laws for upper bounds on the norm of uncertainties. IEEE Trans. Autom. Control 37(6), 159–165 (1992)
Lin, F.J., Teng, L.T., Shieh, P.H.: Intelligent sliding-mode control using RBFN for magnetic levitation system. IEEE Trans. Ind. Electron. 54(3), 1752–1762 (2007)
Buckner, G.D.: Intelligent bounds on modeling uncertainty: applications to sliding mode control. IEEE Trans. Syst. Man Cybern. Part C 32(2), 113–124 (2002)
Fei, J., Ding, H.: Adaptive sliding mode control of dynamic system using RBF neural network. Nonlinear Dyn. 70, 1563–1573 (2012)
Wheeler, G., Su, C.Y., Stepanenko, Y.: A sliding mode controller with improved adaptation laws for the upper bounds on the norm of uncertainties. Automatica 34(12), 1657–1661 (1998)
Takahashi, R.H.C., Peres, P.L.D.: Unknown input observers for uncertain systems: a unifying approach and enhancements. In: Proceedings of the 35th IEEE Conference on Decision and Control, vol. 2, pp. 1483–1488. Kobe (1996).
Jiang, L., Wu, Q.H.: Nonlinear adaptive control via sliding-mode state and perturbation observer. IEE Proc. Control Theory. Appl. 149(4), 269–277 (2002)
Chen, W.H.: Disturbance observer based control for nonlinear systems. IEEE/ASME Trans. Mechatron. 9(4), 706–710 (2004)
Han, J.: From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 56(3), 900–906 (2009)
Youcef-Toumi, K., Ito, O.: A time delay controller for systems with unknown dynamics. ASME J. Dyn. Syst. Meas. Control 112(1), 133–142 (1990)
Yang, Z.J., Hara, S., Kanae, S., Wada, K.: Robust output feedback control of nonlinear systems using a disturbance observer. IEEE Trans. Control Syst. Technol. 19(2), 256–268 (2011)
Chen, M., Wu, Q., Jiang, C.: Disturbance-observer-based robust synchronization control of uncertain chaotic systems. Nonlinear Dyn. 70, 2421–2432 (2012)
Chang, P.H., Lee, J.W.: An observer design for time-delay control and its application to DC servo motor. Control Eng. Pract. 2(2), 263–270 (1994)
Zhong, Q.C., Rees, D.: Control of uncertain LTI systems based on an uncertainty and disturbance estimator. ASME J. Dyn. Syst. Meas. Control 126(4), 905–910 (2004)
Talole, S.E., Phadke, S.B.: Model following sliding mode control based on uncertainty and disturbance estimator. ASME J. Dyn. Syst. Meas. Control 130(3), 034501/1–034501/5 (2008)
Stobart, R.K., Kuperman, A., Zhong, Q.C.: Uncertainty and disturbance estimator-based control for uncertain LTI-SISO system with state delays. ASME J. Dyn. Syst. Meas. Control 133(2), 024502/1–024502/6 (2011)
Kuperman, A., Zhong, Q.C.: Robust control of uncertain nonlinear systems with state delays based on an uncertainty and disturbance estimator. Int. J. Robust. Nonlinear Control 21(1), 79–92 (2011)
Talole, S.E., Phadke, S.B.: Robust input-output linearisation using uncertainty and disturbance estimation. Int. J. Control 82(10), 1794–1803 (2009)
Han, M.C., Chen, Y.H.: Decentralized control design: uncertain systems with strong interconnections. Int. J. Control 61(6), 1363–1385 (1995)
Sabanovic, A.: Variable structure systems with sliding modes in motion control - a survey. IEEE Trans. Ind. Inform. 7(2), 212–223 (2011)
Cheng, J., Yi, J., Zhao, D.: Design of a sliding mode controller for trajectory tracking problem of marine vessels. IEE Proc. Control Theory. Appl. 1(1), 233–237 (2007)
Canale, M., Fagiano, L., Ferrara, A., Vecchio, C.: Vehicle yaw control via second-order sliding mode control technique. IEEE Trans. Ind. Electron. 55(11), 3908–3916 (2008)
Almutaitri, N.B., Zribi, M.: On the sliding mode control of a ball on a beam system. Nonlinear Dyn. 59, 221–238 (2010)
Slotine, J.J.E., Li, W.: Applied Nonlinear Control. Prentice Hall, New York (1991)
Drazenovic, B.: The invariance conditions in variable structure systems. Automatica 5(3), 287–295 (1969)
Ackermann, J., Utkin, V.: Sliding mode control design based on ackermann’s formula. IEEE Trans. Autom. Control 43(2), 234–237 (1998)
Corless, M., Leitman, G.: Continuous state feedback guaranteeing uniform ultimate boundedness for uncertain dynamic systems. IEEE Trans. Autom. Control 26(5), 1139–1144 (1981)
Jia, N., Wang, H.: Nonlinear control of an inverted pendulum system based on sliding mode method. Acta Anal. Funct. Appl. 9(3), 234–237 (2008)
Koofigar, H.R., Hosseinnia, S., Sheikholeslam, F.: Robust adaptive nonlinear control for uncertain control-affine systems and its applications. Nonlinear Dyn. 56, 13–22 (2009)
Rajapakse, N.I., Happawana, G.S., Hurmuzlu, Y.: Suppression of base vibrations and tracking of the tip of an inverted pendulum using sliding mode control and quantitative feedback theory. Proc. IMechE. Part I. J. Syst. Control Eng. 221(5), 673–685 (2007)
Chaouch, D.E., Ahmed-Foitih, Z., Khelfi, M.F.: A self-tuning fuzzy inference sliding mode control scheme for a class of nonlinear systems. J. Vib. Control 18(10), 1494–1505 (2011)
Acknowledgments
This work is supported by Board of Research in Nuclear Sciences, Department of Atomic Energy, Government of India, vide Ref. No. 2012/34/55/BRNS
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Suryawanshi, P.V., Shendge, P.D. & Phadke, S.B. Robust sliding mode control for a class of nonlinear systems using inertial delay control. Nonlinear Dyn 78, 1921–1932 (2014). https://doi.org/10.1007/s11071-014-1569-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-014-1569-9