
Abstract
Chaos control and synchronization of second-order nonautonomous fractional complex chaotic systems are discussed in this paper. A novel fractional nonsingular terminal sliding surface which is suitable for second-order fractional systems is proposed. It is proved that once the state trajectories of the system reach to the proposed sliding surface, they will be converged to the origin within a given finite time. After establishing the desired terminal sliding surface, a novel robust single sliding mode control law is introduced to force the system trajectories to reach the terminal sliding surface over a finite time. The stability and robustness of the proposed method are proved using the latest version of the fractional Lyapunov stability theorem. The proposed method is implemented for synchronization of two uncertain different fractional chaotic systems to confirm the theoretical results. Moreover, the fractional-order gyro system is stabilized using the proposed fractional sliding mode control scheme. It is worth noticing that the proposed fractional sliding mode approach is still a general control method and can be applied for control of second- order uncertain nonautonomous/autonomous fractional systems.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In recent years, chaos and chaotic systems have been identified as very interesting nonlinear dynamical phenomena and have received a flurry of research effort. Chaotic systems have several special features such as extraordinary sensitivity on initial conditions and strange attractors. Second-order chaotic systems are a broad class of the dynamical systems. There are many examples of physical and engineering second-order nonautonomous systems that exhibit chaos. For instance, it is known that the gyroscope system is a second- order dynamical system that shows chaotic behavior [1]. The gyroscope has been found in many applications in optics, navigation, aeronautics, and space engineering fields. Another interesting second- order chaotic dynamical system is the horizontal platform system [2]. It is a mechanical device that can freely rotate around the horizontal axis and is widely used in offshore and earthquake engineering. As another example, the Van der Pol oscillator [3] is a second-order model of electrical oscillator with chaotic behaviors. In addition, many other second-order nonautonomous dynamical systems, such as MLC circuit [4], Duffing–Holmes system [5], extended Rayleigh oscillator [3], and coronary artery system [6], exhibit complex and chaotic dynamics. Due to the existence of chaos in real practical second-order systems and many useful applications in physics and engineering fields, there has been increasing interest in the subject of control and synchronization of second-order chaotic systems in the past few years [7–9].
Fractional calculus, with more than 300-years-old history, generalizes the ordinary differentiation and integration to arbitrary (noninteger) order. Although it has a long history, it has been used in physics and engineering only during the last few years. It has been known that many fractional-order differential systems, such as fractional-order Chen system [10], fractional-order Lu system [11], fractional-order Rossler system [12], fractional-order Arneodo system [13], fractional-order Lorenz system [14], fractional-order unified system [15], fractional-order Genesio-Tesi system [16], fractional-order Chua circuit [17], and fractional-order Duffing system [18], exhibit rich and chaotic dynamics.
In particular, control and synchronization of fractional-order chaotic systems have attracted the attention of many scholars and some techniques have been used to control/synchronize fractional-order chaotic systems. In [19], an adaptive controller has been designed to synchronize chaotic systems of fractional orders. Synchronization of two identical fractional-order chaotic systems using linear error feedback control has been addressed in [20]. A local stability criterion for synchronization of in-commensurate fractional-order chaotic systems has been derived in [21]. Lu [22] has proposed a nonlinear observer to synchronize a class of identical fractional-order chaotic systems. However, most of the works in the literature toward synchronization/stabilization of chaotic fractional-order systems have been performed based on the local stability of the closed-loop system.
The sliding mode control technique is one of the most attractive robust nonlinear control methods. The main feature of a sliding mode controller is to switch the control law to force the state trajectories of the system from the initial states onto some prescribed sliding surface in finite time. Once the state trajectories of the system reach the sliding surface (i.e., when the sliding motion occurs), the closed-loop system dynamics is reduced to the sliding surface dynamics which has desired properties such as good stability and tracking capability.
In [23], the authors have proposed an active sliding mode approach to synchronize chaotic fractional-order systems. They have designed a simple linear sliding surface and have derived an n-dimensional control signals for the n-dimensional synchronization error system based on the active control theory. Hosseinnia et al. [24] have reported design of a linear sliding surface with corresponding switching law for synchronization of two identical uncertain two-dimensional fractional-order chaotic systems. However, these works have not performed the stability discussion of the system on the basis of the fractional-order Lyapunov stability theory. Recently, we have used the latest version of the fractional Lyapunov stability theorem to design some suitable controllers for chaotic systems [25–27].
On the other hand, an important problem in the stabilization or synchronization of chaotic systems is how to realize the control or synchronization of chaotic systems by designing a single controller, which is particularly significant both for theoretical research and practical applications. In practical situations, the problem of multi-input control schemes is a very critical issue. Indeed, from a practical engineering standpoint, it is more valuable to stabilize or synchronize the chaotic system with a single control input. However, to our best knowledge, most of the previous works in the literatures, which have been proposed to stabilize or synchronize fractional nonautonomous chaotic systems, either have not considered the effects of unknown nonlinear terms, model uncertainties, and external disturbances or are sometimes specific and multi-input.
Motivated by the above discussions, this paper proposes a novel nonsingular terminal fractional-order sliding mode controller for robust stabilization/synchronization of second-order fractional nonautonomous chaotic systems in the presence of both model uncertainties and external disturbances. After introducing a novel terminal fractional-order sliding surface, its finite-time stability is proven. Then, on the basis of fractional-order Lyapunov stability theory, a robust sliding control law is derived to guarantee the occurrence of the sliding motion in a given finite time. The proposed control law is single and practical in real world applications. Finally, two illustrative examples are given to demonstrate the applicability and robustness of the proposed control technique and to validate the theoretical results of the paper.
The rest of this paper is organized as follows. In Sect. 2, some preliminaries of fractional calculus are restated. The system description and problem formulation are given in Sect. 3. In Sect. 4, the design procedure of the proposed terminal fractional-order sliding mode approach is included. Section 5 presents two illustrative examples. Finally, conclusions are included in Sect. 6.
2 Preliminaries of fractional calculus
The main definition of fractional integration is as follows [28].
Definition 1
The \(\alpha \)th-order fractional integration of function \(f(t)\) is given by
where \(\Gamma (.)\) is the Gamma function.
Two important and commonly used definitions of fractional derivatives are listed below [28].
Definition 2
Let \(m-1<\alpha \le m, m\in N\), the Riemann–Liouville fractional derivative of order \(\alpha \) of function \(f(t)\) is defined as follows:
Definition 3
The Caputo fractional derivative of order \(\alpha \) of function \(f(t)\) is defined as follows:
where \(m\) is the smallest integer number, larger than \( \alpha \).
Property 1
For the Caputo derivative, we have [28]
Property 2
For the Caputo derivative, the following equality holds [28].
where \(\alpha \ge \beta \ge 0\).
Property 3
The following equality holds for the Caputo derivative [28].
where \(m=0, 1, 2, \ldots ; n-1<\alpha <n\).
In the rest of this paper, the notation \(D^{\alpha }\) indicates the Caputo fractional derivative.
The following theorem is the latest version of the fractional Lyapunov stability theorem [29].
Theorem 1
Let \(x=0\) be an equilibrium point for the Caputo fractional nonautonomous system
where \(f(x,t)\) satisfies the Lipschitz condition with Lipschitz constant \(l>0\) and \(\alpha \in (0,1)\). Assume that there exists a Lyapunov function \(V(t, x(t))\) satisfying
where \(\alpha _1, \alpha _2, \alpha _3\), and \(a\) are positive constants and \(\Vert \cdot \Vert \) denotes an arbitrary norm. Then the equilibrium point of the system (7) is Mittag-Leffler stable.
Remark 1
Mittag-Leffler stability implies asymptotic stability [29].
3 System description and problem statement
Consider the following second-order uncertain nonautonomous fractional-order chaotic system.
where \(\alpha \in (0, 1)\) is the fractional order of the system, \(X(t)=\left[ {x_1, x_2}\right] ^\mathrm{T}\in R^{2}\) is the state vector of the system, \(f(X,t)\in R\) is a given nonlinear function of \(X\) and \(t\), \(\Delta f(X)\in R\) represents an unknown model uncertainty term, \(d^{x}(t)\in R\) is an external disturbance of the system, and \(u(t)\in R\) is the single control input to be designed later.
We define the chaos synchronization problem as follows: design an appropriate controller for the response system (10) such that its state trajectories track the state trajectories of the following drive chaotic system.
where \(Y(t)=\left[ {y_1, y_2}\right] ^\mathrm{T}\in R^{2}\) is the state vector of the system, \(g(Y,t)\in R\) is a given nonlinear function of \(Y\) and \(t, \Delta g(Y)\in R\) is an unknown model uncertainty term, and \(d^{y}(t)\in R\) is an external disturbance.
Assumption 1
The uncertainty terms \(\Delta f({X})\) and \(\Delta g(Y)\) are assumed to be bounded by
where \(\gamma _1\) is a known positive constant.
Assumption 2
The external disturbances \(d^{x}(t)\) and \(d^{y}(t)\) are assumed to be bounded by
where \(\gamma _2\) is a given positive constant.
Defining the synchronization error as \(E(t)=Y(t)-X(t)\), one can obtain
Consequently, the synchronization error dynamics is obtained as follows:
Definition 4
Consider the error system described by Eq. (15). If there exists a constant \(T=T(E(0))>0\), such that \(\lim _{t\rightarrow T} \Vert E(t)\Vert =0\) and \(\Vert E(t)\Vert \equiv 0\), if \(t\ge T\), then states of the error system (15) will converge to zero in the finite time \(T\).
The control goal of this paper is to design a suitable robust nonsingular terminal fractional sliding mode controller for stabilization of the resulting error system around zero in the sense of Definition 4.
Remark 2
It is obvious that if \(Y(t)=0\), then the synchronization problem is transformed to the stabilization problem of the fractional-order uncertain chaotic system (10).
4 Design of robust nonsingular terminal fractional sliding mode controller
In this section, first a novel fractional terminal sliding surface is introduced. Then, proper sliding mode control laws are proposed to ensure the existence of the sliding motion in finite time.
In general, the sliding mode control approach is composed of an equivalent control part that describes the behavior of the system when the trajectories stay over the sliding surface and a variable structure control part that enforces the trajectories to reach the sliding surface and remain on it evermore. In other words, a sliding mode controller includes two major steps. The first step is to select a suitable terminal sliding surface. In this paper, we propose a novel fractional-order terminal sliding surface as follows:
where \(e_i, i=1, 2\) are the system error states, \(\rho \in (0, 1)\) is a constant, and \(k_1\) and \(k_2\) are positive scalars.
Once the system operates in the sliding mode, it satisfies the following equation [30].
Therefore, using Eqs. (16) and (17), the following sliding mode dynamics is obtained.
Using the first equation of (15), one obtains
In the following theorem, we prove the finite-time stability of the sliding mode dynamics (20).
Theorem 2
The sliding mode dynamics (20) is stable and its state trajectories converge to the equilibrium \(e_1 (t)=0\) in a finite time.
Proof
Choose the following positive definite function as a Lyapunov function candidate.
Taking the time derivative of \(V_1 (t)\), we have
Based on Property 1 and Eq. (4), one has
Substituting \(D^{\alpha }e_1\) from (20) into the above equation, one obtains
Using Property 2 and Eq. (5), we have
Defining \(k=\min \left\{ {k_1, k_2}\right\} \), one has
Therefore, based on Theorem 1, the error \(e_1\) will converge to zero asymptotically. In the following, we show the convergence to zero occurs in finite time.
From the inequality (26), one has
After simple calculations, we have
Taking integral of both sides of (28) from \(t_r\) to \(t_s\) and knowing \(e_1 (t_s)=0\), we have
Therefore, the error \(e_1\) will converge to zero in the finite time \(T_1 \le \frac{1}{k(1-\rho )}\mathrm{ln}\left( {|e_1|_1^{1-\rho }+1}\right) +t_r\). Thus, the proof is achieved completely.\(\square \)
Remark 3
In the works [31, 32] integer-order terminal sliding mode manifolds \(s=\dot{e}+\beta e^{q/p}\) and \(s=\dot{e}+\alpha e +\beta e^{q/p}\) have been designed, respectively, where \(\alpha , \beta >0, p>q>0\) are odd integers. Since the control laws in these works contain the term \(e^{(q/p)-1}\), one can see that for \(e<0\), the fractional power \((q/p)-1\) may lead to the term \(e^{(q/p)-1}\notin R\), which leads to \(\dot{e}\notin R\) and \(u(t)\notin R\). This singularity restricts the practical implementation of the controllers in [31, 32]. On the other hand, our proposed fractional nonsingular terminal sliding mode in (16) overcomes this singularity.
Having established the suitable nonsingular terminal sliding surface, the next step is to determine an input signal \(u(t)\) to guarantee that the error system trajectories reach to the sliding surface \(s(t)=0\) and stay on it forever. In general, the sliding mode control law is composed of two parts: (1) an equivalent control that expresses the behavior of the system when the state trajectories stay over the sliding manifold; and (2) a reaching control that enforces the state trajectories to attain the sliding manifold. When the closed-loop system is moving on the sliding surface, it satisfies \(\dot{s}(t)=0\) [30] and then the equivalent control law \(u_\mathrm{eq} (t)\) can be computed as follows:
Replacing \(s(t)\) from Eq. (16) into Eq. (30), it yields
On the basis of Property 3 and Eq. (6), we have
Using Property 1 and Eq. (4), one obtains
From the error system dynamics (15), one has
Therefore, the equivalent control \(u_{\mathrm{eq}} (t)\) is obtained as follows:
Here, the reaching law is selected as follows:
where \(\zeta _1, \zeta _2 >0\) are the switching gains and constant scalars and \(\delta \in (0,1)\) is a constant.
Therefore, the overall control \(u(t)\) in the proposed control scheme is determined by
However, since in practical applications, the system uncertainty terms \(\Delta g(Y)\) and \(\Delta f(X)\) and external disturbances \(d^{y}(t)\) and \(d^{x}(t)\) are unknown, the proposed control input is modified as follows:
To guarantee the existence of the sliding motion (i.e., to ensure that the error trajectories \(e_i (t)\) converge to the sliding surface \(s(t)=0)\), the following theorem is proposed and proved.
Theorem 3
Consider the error system (15). If this system is controlled by the control signal (38), then the system trajectories will converge to the sliding surface \(s(t)=0\) in a finite time.
Proof
Selecting a Lyapunov function in the form of \(V_2 (t)=|s(t)|\) and taking its time derivative, one has
Inserting \(\dot{s}(t)\) from (34) into (39), we have
It is clear that
Based on Assumptions 1 and 2 and inequalities (12) and (13), one has
Introducing the control law (38) into the right-hand side of the above inequality, one obtains
After some simple manipulations and based on Properties 1 and 3 and Eqs. (4) and (6), one can obtain
Based on \(\mathrm{sign}(s)s=|s|\) and \(\mathrm{sign}^{2}(s)=1\), one has
where \(\zeta =\min \left\{ \zeta _i (i=1, 2)\right\} \).
Therefore, according to Theorem 1, the state trajectories of the error system (15) will converge to \(s(t)=0\) asymptotically. In order to show that the sliding motion occurs in finite time, we can obtain the reaching time as follows.
From inequality (45), we have
It is clear that
Taking integral of both sides of (47) from 0 to \(t_r\) and setting \(s(t_r)=0\), we have
Therefore, the state trajectories of the error system (15) will converge to \(s(t)=0\) in the finite time \(T_2 \le \frac{1}{\zeta (1-\delta )}\mathrm{ln}\left( |s(0)|^{1-\delta }+1\right) \). This completes the proof.\(\square \)
Remark 4
The proposed fractional sliding mode controller of Eqs. (16) and (38) is applicable for synchronization of two identical uncertain fractional-order chaotic systems with different initial conditions, if the systems (10) and (11) satisfy \(f(\cdot )=g(\cdot )\).
Theorem 4
Consider the fractional-order chaotic system (10). If this system is controlled by the single control signal (49), then the system trajectories will converge to the sliding surface \(s(t)=x_2+D^{\alpha -1}\left( k_1 x_1 +k_2 \mathrm{sign}(x_1)|x_1|^{\rho }\right) =0\) in a finite time.
where \(\left| D^{1-\alpha }\Delta f(X)\right| \le \sigma _1, \left| D^{1-\alpha }d^{x}(t)\right| \le \sigma _2, \sigma _1\) and \(\sigma _2\) are given positive constants, \(\mu \in (0, 1)\) is a constant, and \(\xi _1\) and \(\xi _2\) are two positive gains.
Proof
Choosing a Lyapunov function in the form of \(V_3 (t)=|s(t)|\) and taking its time derivative, one has
Knowing \(\dot{s}(t)=\dot{x}_2 +D^{\alpha }\left( k_1 x_1 +k_2 \mathrm{sign}(x_1)|x_1|^{\rho }\right) \) and based on Property 3 and Eq. (6), we have
Using Property 1 and Eq. (4), one obtains
Using the system dynamics (10), one can obtain
It is obvious that
Introducing control law (49) into the right-hand side of (54), we get
From some simple mathematical manipulations and on the basis of Properties 2 and 3 and Eqs. (5) and (6), we have
where \(\xi =\min \{\xi _1, \xi _2\}\).
Therefore, from Theorem 1, the state trajectories of the chaotic system (10) will converge to \(s(t)=0\) asymptotically. Moreover, based on the inequality (56) and using a similar approach in Eqs. (46)–(48), one can easily prove that the sliding motion happens in the finite time \(T_3 \le \frac{1}{\xi (1-\mu )}\mathrm{ln}\left( |s(0)|^{1-\mu }+1\right) \). Thus the proof is completed.
Remark 5
It should be noticed that as mentioned in [30], the nonsmooth Lyapunov functions such as \(V(t)=|e(t)|\) and \(V(t)=|s(t)|\) are usual to show the finite-time stability of a system.
Remark 6
It is noted that due to the existence of chaos in real world systems and many useful applications in engineering, synchronization and stabilization of chaotic fractional/integer-order systems have attracted significant interests in the recent years [33–48].
5 Numerical simulations
In this section, two illustrative examples are presented to illustrate the effectiveness and applicability of the proposed fractional sliding mode scheme and to verify the theoretical results of the paper. Numerical simulations are performed using MATLAB software. The numerical approach described in the following subsection with a step time of 0.001 is applied to solve the fractional-order equations.
5.1 Numerical method for solving fractional differential equations
Diethelm et al. [49] have proposed a reliable approximate numerical technique for numerical solving of fractional-order differential equations, which is a generalization of the Adams–Bashforth–Moulton algorithm for ordinary differential equations. This method works on the basis of a predictor–corrector scheme using the Caputo definition of the fractional-order differential equations. The main procedure of this approach is as follows.
Consider the following fractional-order differential equation.
which is equivalent to the following Volterra integral equation.
Setting \(h=\frac{T}{N}, t_n =nh, n=0, 1, 2, \ldots , N\), the above equation becomes
where
The estimation error of this technique is
where \(p=\min (2, 1+\alpha )\).
5.2 Example 1: Synchronization of fractional-order Duffing–Holmes and Van der Pol systems
This example illustrates the effectiveness of the proposed fractional terminal sliding mode controller in solving the problem of chaos synchronization between two different fractional-order chaotic systems. Consider the following fractional-order uncertain Duffing–Holmes system [24] as the slave system and the fractional-order uncertain Van der Pol system [50] as the master system.
The uncertainty terms of the drive and response systems are selected as follows:
Initial conditions of the slave and master systems are selected as \(x_1 (0)=0.2, x_2 (0)=-0.2\) and \(y_1 (0)=-0.1, y_2 (0)=0.3\), respectively. The control parameters for the controller (38) are chosen as \(k_1 =k_2 =1, \rho =\delta =0.9, \zeta _1 =\zeta _2 =2\), and \(\gamma _1 =\gamma _2 =0.75\). The fractional-order \(\alpha \) is also set to 0.9 to ensure the existence of chaos for the Duffing–Holmes and Van der Pol systems [24, 50].
We use Eq. (16) and design the following sliding surface.
Subsequently, according to Eq. (33), the proper control input is designed as follows:
The synchronization errors between the fractional-order uncertain Duffing–Holmes system and Van der Pol system are shown in Fig. 1. It can be seen that the synchronization errors converge to zero, which indicates that the fractional-order Duffing–Holmes and Van der Pol systems are indeed synchronized, as illustrated in Figs. 2 and 3. The time response of the sliding surface (66) is plotted in Fig. 4. It is clear that the sliding surface converges to zero in finite time. The time history of the applied control input (67) is depicted in Fig. 5. Obviously, the control input is feasible in practical applications.

State trajectories of the synchronization error system

State trajectories of the master and slave systems (\(x_1 -y_1)\)

State trajectories of the master and slave systems (\(x_2 -y_2\))

Time response of the applied sliding surface for the synchronization error system

Time history of the applied control input for the synchronization error system
5.3 Example 2: chaos control of fractional-order nonautonomous gyro
The usefulness and applicability of the proposed method are validated in this example via chaos control of a fractional-order gyro. The mathematical equations of an uncertain fractional-order gyro with control input are represented as follows [26]:
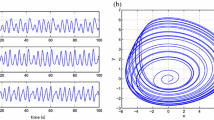
where \(x_1 \) denotes the rotation angle, \(x_2\) represents the rotation angle velocity, and \(\Delta f(X)+d^{x}(t)=0.1\cos (2t)x_2-0.15\sin (t)\). For \(\alpha =0.97\), the maximal Lyapunov exponent of this system is equal to \(\lambda _\mathrm{max} =0.2703\), which indicates that the fractional-order gyro system possesses chaotic behavior.
In order to suppress the chaotic behavior of the fractional-order gyro (68), we apply the proposed sliding mode controller (49) with \(k_1 =k_2 =2, \xi _1 =\xi _1 =0.5, \mu =\rho =0.9, \sigma _1 =0.45\), and \(\sigma _2 =0.5\). Initial conditions of the gyro system are selected as \(x_1 (0)=1\) and \(x_2 (0)=-1\).
Based on Theorem 4, the following terminal sliding surface is applied.
Accordingly, using Eq. (49), the following control input is designed.
Figure 6 shows the state trajectories of the controlled fractional-order gyro system (68). It is seen that the chaotic behavior of the system is suppressed and, therefore, there is no strange attractor anymore. The time response of the sliding surface (69) is revealed in Fig. 7. One can see that the sliding surface approaches to the origin over a finite time. Moreover, the time history of the applied control input (70) is plotted in Fig. 8. It is seen that the control input is practical.

State trajectories of the controlled fractional gyro system

Time response of the applied sliding surface for controlling the fractional gyro system

Time history of the applied control input for controlling the fractional gyro system
6 Conclusions
This paper concerns the problem of stabilization/synchronization of second-order uncertain nonautonomous fractional chaotic systems. We proposed a new fractional terminal sliding surface which has the finite-time stability characteristics. Then, based on the sliding mode control theory and fractional Lyapunov stability theory, a robust switching sliding mode control law is designed to ensure the occurrence of the sliding motion in a finite time. Simulation results show that the proposed controller can effectively synchronize two different uncertain fractional second-order chaotic systems. Moreover, an illustrative example illustrates the effectiveness of the proposed scheme in chaos control of an uncertain fractional gyro system. The main advantages of the proposed fractional sliding mode are as follows: (1) It is robust against system uncertainties and external disturbances; (2) It guarantees that the closed-loop system is stable in a given finite time rather than merely asymptotic stability; and (3) It has only one control input. Therefore, it is simple and easy to implement.
References
Chen, H.K.: Chaos and chaos synchronization of a symmetric gyro with linear-plus-cubic damping. J. Sound Vib. 255, 719–740 (2002)
Ge, Z.M., Yu, T.C., Chen, Y.S.: Chaos synchronization of a horizontal platform system. J. Sound Vib. 268, 731–749 (2003)
Bowong, S., Kakmeni, M., Koina, R.: Chaos synchronization and duration time of a class of uncertain chaotic systems. Math. Comput. Simul. 71, 212–228 (2006)
Jiang, G.P., Zheng, W.X., Tang, W.K.S., Chen, G.: Integral-observer-based chaos synchronization. IEEE Trans. Circuits Syst. 53, 110–114 (2006)
Yau, H.-T.: Design of adaptive sliding mode controller for chaos synchronization with uncertainties. Chaos Soliton Fract. 22, 341–347 (2004)
Gong, C.Y., Li, Y.M., Sun, X.H.: Backstepping control of synchronization for biomathematical model of muscular blood vessel. J. Appl. Sci. 24, 604–607 (2006)
Aghababa, M.P.: A novel adaptive finite-time controller for synchronizing chaotic gyros with nonlinear inputs. Chin. Phys. B 20, 090505 (2011)
Aghababa, M.P., Aghababa, H.P.: Synchronization of mechanical horizontal platform systems in finite time. Appl. Math. Model 36, 4579–4591 (2012)
Aghababa, M.P., Aghababa, H.P.: Finite-time stabilization of uncertain non-autonomous chaotic gyroscopes with nonlinear inputs. Appl. Math. Mech. 33, 155–164 (2012)
Lu, J.G., Chen, G.: A note on the fractional-order Chen system. Chaos Soliton Fract. 27, 685–688 (2006)
Lu, J.G.: Chaotic dynamics of the fractional-order Lu system and its synchronization. Phys. Lett. A 354, 305–311 (2006)
Li, C., Chen, G.: Chaos and hyperchaos in the fractional-order Rossler equations. Phys. A Stat. Mech. Appl. 341, 55–61 (2004)
Lu, J.G.: Chaotic dynamics and synchronization of fractional-order Arneodo’s systems. Chaos Soliton Fract. 26, 1125–1133 (2005)
Yang, Q., Zeng, C.: Chaos in fractional conjugate Lorenz system and its scaling attractors. Commun. Nonlinear Sci. Numer. Simul. 15, 4041–4051 (2010)
Wu, X., Li, Ji, Chen, Gu: Chaos in the fractional order unified system and its synchronization. J. Frank. Inst. 345, 392–401 (2008)
Guo, L.J.: Chaotic dynamics and synchronization of fractional-order Genesio-Tesi systems. Chin. Phys. B 14, 1517–1521 (2005)
Zhu, H., Zhou, S., Zhang, J.: Chaos and synchronization of the fractional-order Chua’s system. Chaos Soliton Fract. 39, 1595–1603 (2009)
Ge, Z.-M., Ou, C.-Y.: Chaos in a fractional order modified Duffing system. Chaos Soliton Fract. 34, 262–291 (2007)
Hu, J., Han, Y., Zhao, L.: Synchronizing chaotic systems using control based on a special matrix structure and extending to fractional chaotic systems. Commun. Nonlinear Sci. Numer. Simul. 15, 115–123 (2010)
Peng, G.: Synchronization of fractional order chaotic systems. Phys. Lett. A 363, 426–432 (2007)
Wang, J.-W., Zhang, Y.-B.: Synchronization in coupled nonidentical incommensurate fractional-order systems. Phys. Lett. A 374, 202–207 (2009)
Lu, J.G.: Nonlinear observer design to synchronize fractional-order chaotic systems via a scalar transmitted signal. Phys. A 359, 107–118 (2006)
Tavazoei, M.S., Haeri, M.: Synchronization of chaotic fractional-order systems via active sliding mode controller. Phys. A 387, 57–70 (2008)
Hosseinnia, S.H., Ghaderi, R., Ranjbar, A., Mahmoudian, M., Momani, S.: Sliding mode synchronization of an uncertain fractional order chaotic system. Comput. Math. Appl. 59, 1637–1643 (2010)
Aghababa, M.P.: A novel terminal sliding mode controller for a class of non-autonomous fractional-order systems. Nonlinear Dyn. 73, 679–688 (2013)
Aghababa, M.P.: No-chatter variable structure control for fractional nonlinear complex systems. Nonlinear Dyn. 73, 2329–2342 (2013)
Aghababa, M.P.: Finite-time chaos control and synchronization of fractional-order chaotic (hyperchaotic) systems via fractional nonsingular terminal sliding mode technique. Nonlinear Dyn. 69, 247–261 (2012)
Podlubny, I.: Fractional Differential Equations. Academic Press, New York (1999)
Li, Y., Chen, Y.Q., Podlubny, I.: Stability of fractional order nonlinear dynamic systems: Lapunov direct method and generalized Mittag-Leffler stability. Comput. Math. Appl. 59, 1810–1821 (2010)
Utkin, V.I.: Sliding modes in control optimization. Springer, Berlin (1992)
Yu, X., Man, Z.: Multi-input uncertain linear systems with terminal sliding-mode control. Automatica 34, 389–392 (1998)
Yu, X., Man, Z.: Fast terminal sliding-mode control design for nonlinear dynamical systems. IEEE Trans. Circuit Syst. 49, 261–264 (2002)
Jesus, I.S., Machado, J.A.T.: Fractional control of heat diffusion systems. Nonlinear Dyn. 54, 263–282 (2008)
Rapaić, M.R., Jeličić, Z.D.: Optimal control of a class of fractional heat diffusion systems. Nonlinear Dyn. 62, 39–51 (2010)
Tavazoei, M.S., Haeri, M., Bolouki, S., Siami, M.: Using fractional-order integrator to control chaos in single-input chaotic systems. Nonlinear Dyn 55, 179–190 (2009)
Deng, W., Li, C., Lu, J.: Stability analysis of linear fractional differential system with multiple time delays. Nonlinear Dyn. 48, 409–416 (2007)
Lee, S.M., Choi, S.J., Ji, D.H., Park, J.H., Won, S.C.: Synchronization for chaotic Lur’e systems with sector restricted nonlinearities via delayed feedback control. Nonlinear Dyn. 59, 277–288 (2010)
Kwon, O.M., Park, J.H., Lee, S.M.: Secure communication based on chaotic synchronization via interval time-varying delay feedback control. Nonlinear Dyn. 63, 239–252 (2011)
Aghababa, M.P., Aghababa, H.P.: Synchronization of nonlinear chaotic electromechanical gyrostat systems with uncertainties. Nonlinear Dyn. 67, 2689–2701 (2012)
Aghababa, M.P., Aghababa, H.P.: Synchronization of chaotic systems with uncertain parameters and nonlinear inputs using finite-time control technique. Nonlinear Dyn. 69, 1903–1914 (2012)
Wu, X., Wang, H.: A new chaotic system with fractional order and its projective synchronization. Nonlinear Dyn. 61, 407–417 (2010)
Petráš, I.: Chaos in the fractional-order Volta’s system: modeling and simulation. Nonlinear Dyn. 57, 157–170 (2009)
Zeng, C., Yang, Q., Wang, J.: Chaos and mixed synchronization of a new fractional-order system with one saddle and two stable node-foci. Nonlinear Dyn. 65, 457–466 (2011)
Wang, Z., Sun, Y., Qi, G., van Wyk, B.J.: The effects of fractional order on a 3-D quadratic autonomous system with four-wing attractor. Nonlinear Dyn. 62, 139–150 (2010)
Balochian, S., Sedigh, A.K., Haeri, M.: Stabilization of fractional order systems using a finite number of state feedback laws. Nonlinear Dyn. 66, 141–152 (2011)
Hamamci, S.E.: Stabilization using fractional-order PI and PID controllers. Nonlinear Dyn. 51, 329–343 (2008)
Odibat, Z.M.: Adaptive feedback control and synchronization of non-identical chaotic fractional order systems. Nonlinear Dyn. 60, 479–487 (2010)
Jesus, I.S., Machado, J.A.T.: Development of fractional order capacitors based on electrolyte processes. Nonlinear Dyn. 56, 45–55 (2009)
Diethelm, K., Ford, N.J., Freed, A.D.: A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn. 29, 3–22 (2002)
Ge, Z.-M., Hsu, M.-Y.: Chaos excited chaos synchronizations of integral and fractional order generalized Van der Pol systems. Chaos Soliton Fract. 36, 592–604 (2008)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Aghababa, M.P. Synchronization and stabilization of fractional second-order nonlinear complex systems. Nonlinear Dyn 80, 1731–1744 (2015). https://doi.org/10.1007/s11071-014-1411-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-014-1411-4