
Abstract
In this paper, by Darboux transformation and symbolic computation we investigate the coupled cubic–quintic nonlinear Schrödinger equations with variable coefficients, which come from twin-core nonlinear optical fibers and waveguides, describing the effects of quintic nonlinearity on the ultrashort optical pulse propagation in the non-Kerr media. Lax pair of the equations is obtained, and the corresponding Darboux transformation is constructed. One-soliton solutions are derived; some physical quantities such as the amplitude, velocity, width, initial phases, and energy are, respectively, analyzed; and finally an infinite number of conservation laws are also derived. These results might be of some value for the ultrashort optical pulse propagation in the non-Kerr media.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Optical solitons have the potential to become carriers in the telecommunication systems because of the capability of propagating long distances with high intensity and without attenuation [1–12]. Dynamics of light pulses are described by the nonlinear Schrödinger (NLS)-typed equations with cubic nonlinear terms [8, 13], and the non-Kerr nonlinearity effect comes into play [9] when the intensity of the incident light field becomes stronger, which is described by the NLS-typed equations with higher-order nonlinear terms [10]. The NLS equation is a vital model to describe certain phenomena from Physics and Engineering to Biochemistry [14]. Certain interest has been focused on the NLS-typed equations since the experimental observation ofthe multi-stability of solitons in non-Kerr fibers [1, 9, 15–27].
In this paper, the coupled cubic–quintic nonlinear NLS equations with variable coefficients [2, 22] describing the effects of quintic nonlinearity on the ultrashort optical pulse propagation in the non-Kerr media are investigated [28],
where the components \(q_1\) and \(q_2\) of the electromagnetic fields propagate along the coordinate \(z\) in the two cores of an optical waveguide, \(t\) is the local time [28, 29], \(r(z)\) and \(y(z)\) represent the group velocity dispersions, \(m(z)\) and \(k(z)\) are the nonlinearity parameters, \(n(z)\) and \(w(z)\) are the saturation of the nonlinear refractive indexes, \(p(z)\) and \(a(z)\) are the self-steepening, and \(s(z)\) and \(b(z)\) are the delayed nonlinear response effects [30]. With a reduction of \(q_1=q\) and \(q_2=0\) (or \(q_1=0\) and \(q_2=q\)), Eq. (1) turns to the integrable Kundu–Eckhaus equation [1, 22] with variable coefficients, which possesses the applications in the nonlinear optics [27], quantum field theory [25], and weakly nonlinear dispersive matter waves [26]. Equation (1) with constant coefficients has been investigated in several respects [1]. But as far as we know, the Lax pair, Darboux transformation (DT), and conservation laws of Eq. (1) have not been presented as yet.
The outline of this paper is organized as follows: In Sect. 2, a Lax pair of Eq. (1) is presented and the corresponding DT constructed. In Sect. 3, one-soliton solutions of Eq. (1) is obtained and some physical quantities such as the amplitude, velocity, width, initial phases, and energy are, respectively, analyzed. In Sect. 4, an infinite number of conservation laws of Eq. (1) are derived by symbolic computation [2, 31–37]. Section 5 contains our conclusions.
2 Lax pair and DT of Eq. (1)
In this section, we present a Lax pair of Eq. (1) [38]. Linear eigenvalue problem for Eq. (1) can be given as [1]
where \(\varPsi ={[ \psi _1(z,t), \psi _2(z,t),\psi _3(z,t)]}^T,\,T\) denotes the transpose of the vector, while \(U\) and \(V\) are respectively given by
where \(L\) is a constant and
the asterisk is the complex conjugate and \(\lambda \) denotes the spectral parameter. Equation (1) can be achieved from the compatibility condition
where \([\,U,\,V\,]=U\,V-V\,U\). Thus, the Lax pair of Eq. (1) has been derived.
As DT is composed of the eigenfunction and potential transformation, it can be used to construct a series of explicit solutions for the nonlinear evolution equations (NLEEs) from the initial ones in a recursive manner [39, 40], and the procedure of the DT can be achieved by symbolic computation [41, 42]. DT has been used to investigate many NLEEs [39, 40] as a straightforward algorithm. Eigenfunction transformation for Lax Pair (2) can be taken as
where \(n=1,2,3\), and \(A_n(z,t),\,B_n(z,t)\), and \(C_n(z,t)\) are the functions of \(z\) and \(t\) to be determined, \(I\) is the \(3\times 3\) identity matrix, \(S\) is a \(3\times 3\) matrix to be determined, and \(\hat{\varPsi }\) is required to satisfy
that is,
with
and
Then, the matrix \(S\) can be constructed as
with
and
where \({[ \psi _1(\lambda _1), \psi _2(\lambda _1), \psi _3(\lambda _1)]}^T\) is the solution of Lax Pair (2) with \(\lambda =\lambda _1,\,\alpha _1(z)\,\alpha _2(z)\) and \(\alpha _3(z)\) are functions of \(z\). Transformations between the new potentials \(\hat{q_1},\,\hat{q_2}\) and the old ones \(q_1,\,q_2\) can be presented as
3 One-soliton solutions of Eq. (1)
In this section, we will construct the one-soliton solutions of Eq. (1). Taking \(q_1=q_2=0\) as the seed solutions of Eq. (1), Lax Pair (2) with \(\lambda =\lambda _1\) can be solved as
where \(c_1,\,c_2\) and \(c_3\) are arbitrary constants and \(\xi =\int \big [a_1(z) \lambda _1^2+a_{22}(z)\big ] \, \mathrm{d}z-i t \lambda _1 \).
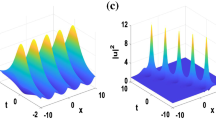
Substituting Eq. (14) into Eq. (13), we can get one-soliton solutions of Eq. (1) as follows:
Some physical quantities such as the amplitude \(A\), velocity \(v\), width \(W\), initial phases \(I_p\), and energy \(E\) are given to characterize the features of propagating solitons:
From above, we can see that the width and initial phases are both dependent on the imaginary part of \(\lambda _1\), while the amplitude, velocity, and energy are determined by the imaginary part of \(\lambda _1\) and variable coefficients.
Multi-soliton solutions can be achieved by the iterative algorithm. The dynamic features of the obtained soliton solutions are depicted in Fig. 1 using Eqs. (15)\(-\)(16).

4 An infinite number of conservation laws
In this section, according to Refs. [43, 44] we present infinitely many independent conservation laws as a further support of the integrability for Eq. (1).
We will introduce two new variables,
and take derivative of \( \varGamma _{j} \) (\( j=1,2 \)) with respect to \(t\) by the use of Eq. (2) to obtain the following two Riccati-type equations:
then multiply Eqs. (18) and (19), respectively, by \( q_1 \) and \(q_2\), and expand \( q_1 \varGamma _1 \) and \( q_2 \varGamma _2 \) in power series of \(1/\lambda \),
\( {\varGamma _{1}}_{m} \) and \( {\varGamma _{2}}_{m} \) (\( m= 1, 2, \ldots \)) are determined by
By the compatibility condition \( \left( {\log \psi _{1}}\right) _{zt} = \left( {\log \psi _{1}}\right) _{tz} \) yields the following equation in the form of conservation law:
By substituting Eq. (20) into Eq. (21) and equating the terms with the same power of \( 1/\lambda \), we can obtain a sufficiently large number of conservation laws: \( i\,\frac{\partial \rho _{k}}{\partial t} = \frac{\partial J_{k}}{\partial z} \,(k=1,2,\ldots )\), where \( \rho _{k} \) and \( J_{k}\) (\(k=1,2,\ldots \)) are the conserved densities and associated fluxes, respectively.
5 Conclusions
Twin-core nonlinear fibers and waveguides, i.e., couplers, have become a current interest in nonlinear optics [28]. In this paper, by virtue of DT (5) and symbolic computation, Eq. (1) describing the effects of quintic nonlinearity on the ultrashort optical pulse propagation in non-Kerr media has been investigated. Lax Pair (2) of Eq. (1) has been presented, and the corresponding DT (5) has been constructed. Moreover, one-soliton solutions, i.e., Solutions (15)–(16), have been obtained and an infinite number of conservation laws, i.e., Expressions (20)–(21), have also been derived. Using Solutions (15)–(16), the dynamic features of the soliton solutions have been displayed in Figure 1. Some physical quantities such as the amplitude, velocity, width, initial, phases, and energy are also, respectively, analyzed. These results might be of some value for the ultrashort optical pulse propagation in the non-Kerr media.
References
Radhakrishnan, R., Kundu, A., Lakshmanan, M.: Coupled nonlinear Schrodinger equations with cubic–quintic nonlinearity: integrability and soliton interaction in non-Kerr media. Phys. Rev. E 60, 3314–3323 (1999)
Zhang, H.Q., Xu, T., Li, J., et al.: Integrability of an N-coupled nonlinear Schrödinger system for polarized optical waves in an isotropic medium via symbolic computation. Phys. Rev. E 77, 026605–026614 (2008)
Mollenauer, L.F., Stolen, R.H., Gordon, J.P.: Experimental observation of picosecond pulse narrowing and solitons in Optical fibers. Phys. Rev. Lett. 45, 1095–1098 (1980)
Porsezian, K., Kuriakose, V.C.: Optical Solitons Theoretical and Experimental Challenges. Springer, Berlin (2003)
Hasegawa, A., Kodama, Y.: Solitons in Optical Communications. Oxford University, Oxford (1995)
Islam, M.N.: Ultrafast Fiber Switching Devices and Systems. Cambridge University, Cambridge (1992)
Newell, A.C., Moloney, J.V.: Nonlinear Optics. Addison-Wesley, Boston (1992)
Zhang, H.Q.: Energy-exchange collisons of vector solitons in the N-coupled mixed derivative nonlinear Schrodinger equations from the birefringent optical fibers. Opt. Commun. 290, 141–145 (2013)
Hong, W.P.: Optical solitary wave solutions for the higher order nonlinear Schrödinger equation with cubic-quintic non-Kerr terms. Opt. Commun. 194, 217–223 (2001)
Skarka, V., Berezhiani, V.I., Miklaszewski, R.: Spatiotemporal soliton propagation in saturating nonlinear optical media. Phys. Rev. E 56, 1080–1087 (1997)
Qi, F.H., Tian, B., Lü, X., et al.: Darboux transformation and soliton solutions for the coupled cubic–quintic nonlinear Schrodinger equations in nonlinear optics. Commun. Nonlinear Sci. Numer. Simulat. 17, 2372–2381 (2012)
Shan, W.R., Qi, F.H., Guo, R., et al.: Conservation laws and solitons for the coupled cubic–quintic nonlinear Schrödinger equations in nonlinear optics. Phys. Scr. 85, 0150021–0150029 (2012)
Wu, X.F., Hua, G.S., Ma, Z.Y.: Novel rogue waves in an inhomogenous nonlinear medium with external potentials. Commun. Nonlinear Sci. Numer. Simul. 18, 3325–3336 (2013)
Dai, C.Q., Zhu, H.P.: Superposed Akhmediev breather of the (3+1)-dimensional generalized nonlinear Schröinger equation with external potentials. Ann. Phys. 341, 142–152 (2014)
Lü, X.: Soliton behavior for a generalized mixed nonlinear Schrödinger model with N-fold Darboux transformation. Chaos 23, 033137 (2013)
Zhu, H.P.: Nonlinear tunneling for controllable rogue waves in two dimensional graded-index waveguides. Nonlinear Dyn. 72, 873–882 (2013)
Lü, X., Peng, M.S.: Painlevé-integrability and explicit solutions of the general two-coupled nonlinear Schrödinger system in the optical fiber communications. Nonlinear Dyn. 73, 405–410 (2013)
Dai, C.Q., Wang, X.G., Zhou, G.Q.: Stable light-bullet solutions in the harmonic and parity-time-symmetric potentials. Phys. Rev. A 89(013834), 1–7 (2014)
Dattoli, G., Orsitto, F.P., Torre, A.: Evidence for multistability of light solitons in SF6 absorption measurements. Opt. Lett. 14, 456–458 (1989)
Gedalin, M., Scott, T.C., Band, Y.B.: Optical solitons in the higher order nonlinear Schrödinger equation. Phys. Rev. Lett. 78, 448–451 (1997)
Yan, Z.Y.: Optical solitary wave solutions to nonlinear schrödinger equation with cubic–quintic nonlinearity in non-Kerr media. J. Phys. Soc. Jpn. 73, 2397–2401 (2004)
Zong, F.D., Dai, C.Q., Zhang, J.F.: Optical solitary waves in fourth-order dispersive nonlinear Schrödinger equation with self-steepening and self-frequency shift. Commun. Theor. Phys. 45, 721–726 (2006)
Kundu, A.: Landau–Lifshitz and higher-order nonlinear systems gauge generated from nonlinear Schrödinger type equation. J. Math. Phys. 25, 3433–3438 (1984)
Levi, D., Scimiterna, C.: The Kundu–Eckhaus equation and its discretizations. J. Phys. A 42, 465203–465210 (2009)
Wang, M.L., Zhang, J.L., Li, X.Z.: Solitary wave solutions of a generalized derivative nonlinear Schrödinger equation. Commun. Theor. Phys. 50, 39–42 (2008)
Johnson, R.S.: On the modulation of water waves in the neighbourhood of \(kh\,\approx \) 1.363. Proc. Roy. Soc. London A 357, 131–141 (1977)
Kodama, Y.: Optical solitons in a monomode fiber. J. Stat. Phys. 39, 597–614 (1985)
Albuch, L., Malomed, B.A.: Transitions between symmetric and asymmetric solitons in dual-core systems with cubic–quintic nonlinearity. Math. Comput. Simulat. 74, 312–322 (2007)
Hisakado, M., Wadati, M.J.: Gauge transformations among generalised nonlinear Schrödinger equations. Phys. Soc. Jpn 63, 3962–3966 (1994)
Li, S.Q., Li, L., Li, Z.H., et al.: Properties of soliton solutions on a cw background in optical fibers with higher-order effects. Opt. Soc Am. 21, 2089–2094 (2004)
Tian, B., Gao, Y.T., Zhu, H.W.: Variable-coefficient higher-order nonlinear Schrödinger model in optical fibers: variable-coefficient bilinear form, Bäcklund transformation, brightons and symbolic computation. Phys. Lett. A 366, 223–229 (2007)
Tian, B., Wei, G.M., Zhang, C.Y., et al.: Transformations for a generalized variable-coefficient Korteweg-de Vries model from blood vessels, Bose-Einstein condensates, rods and positons with symbolic computation. Phys. Lett. A 356, 8–16 (2006)
Yan, Z.Y., Zhang, H.Q.: Symbolic computation and new families of exact soliton-like solutions to the integrable Broer-Kaup (BK) equations in (2+1)-dimensional spaces. J. Phys. A 34, 1785–1792 (2001)
Das, G., Sarma, J.: Response to comment on a new mathematical approach for finding the solitary waves in dusty plasma [Phys. Plasmas 6, 4392 (1999)]. Phys. Plasmas 6(4394), 1–4 (1999)
Wang, Y.F., Tian, B., Wang, P., et al.: Bell-polynomial approach and soliton solutions for the Zhiber–Shabat equation and (2+1)-dimensional Gardner equation with symbolic computation. Nonlinear Dyn. 69, 2031–2040 (2012)
Guo, R., Hao, H.Q.: Breathers and multi-soliton solutions for the higher-order generalized nonlinear Schrödinger equation. Commun. Nonlinear Sci. Numer. Simulat. 18, 2426–2435 (2013)
Guo, R., Hao, H.Q., Zhang, L.L.: Dynamic behaviors of the breather solutions for the AB system in fluid mechanics. Nonlinear Dyn 74, 701–709 (2013)
Ablowitz, M.J., Kaup, D.J., Newell, A.C., et al.: Nonlinear-evolution equations of physical significance. Phys. Rev. Lett. 31, 125–127 (1973)
Li, J., Zhang, H.Q., Xu, T., et al.: Soliton-like solutions of a generalized variable-coefficient higher order nonlinear Schrödinger equation from inhomogeneous optical fibers with symbolic computation. J. Phys. A 40, 13299–13309 (2007)
Porsezian, K., Nakkeeran, K.: Optical solitons in presence of Kerr dispersion and self-frequency shift. Phys. Rev. Lett. 76, 3955–3958 (1996)
Li, J., Zhang, H.Q., Xu, T., et al.: Symbolic computation on the multi-soliton-like solutions of the cylindrical Kadomtsev–Petviashvili equation from dusty plasmas. J. Phys. A 40, 7643–7657 (2007)
Li, Y.S.: Soliton and Integrable System. Shanghai Scientific and Technological Education Publishing, Shanghai (1999)
Wadati, M., Sanuki, H., Konno, K.: Relationships among inverse method, Bäcklund transformation and an infinite number of conservation Laws. Prog. Theor. Phys. 53, 419–436 (1975)
Zhang, D.J., Chen, D.Y.: The conservation laws of some discrete soliton systems. Chaos Solitons Frac. 14, 573–579 (2002)
Acknowledgments
We express our sincere thanks to all the members of our discussion group for their valuable suggestions. This work has been supported by the National Natural Science Foundation of China under Grant No. 11101421, the Special Foundation for Young Scientists of Institute of Remote Sensing and Digital Earth of Chinese Academy of Sciences under Grant No. Y1S01500CX, and the Scientific Research Project of Beijing Educational Committee (No. SQKM201211232016).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Qi, FH., Ju, HM., Meng, XH. et al. Conservation laws and Darboux transformation for the coupled cubic–quintic nonlinear Schrödinger equations with variable coefficients in nonlinear optics. Nonlinear Dyn 77, 1331–1337 (2014). https://doi.org/10.1007/s11071-014-1382-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-014-1382-5