
Abstract
This paper investigates the nonzero mean probability density function (PDF) of nonlinear oscillators under additive Poisson impulses. The PDF is governed by the generalized Fokker–Planck–Kolmogorov (FPK) equation which is also called the Kolmogorov–Feller (KF) equation. An exponential-polynomial closure (EPC) method is adopted to solve the equation. Five examples are considered in numerical analysis to show the effectiveness of the EPC method. The nonzero mean response of nonlinear oscillators is formulated due to either nonlinearity type or nonzero mean amplitude of Poisson impulses. The analysis shows that the PDFs obtained with the EPC method agree with the simulated results when the polynomial order is 4 or 6. This agreement is also observed in the tail regions of the obtained PDFs. The comparison further shows that the nonzero mean PDF of displacement is nonsymmetrically distributed. Comparatively, the PDF of velocity still has a symmetrical distribution pattern when the nonlinearity only exists in displacement.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The probability density function (PDF) solution to the response of nonlinear stochastic oscillators has been a challenging research topic. In particular, the PDF solution of nonlinear oscillators under Poisson impulses (i.e., Poisson white noise) has attracted much attention in recent years. Poisson white noise represents a sequence of impulses with independent identically distributed magnitudes arriving at random times. It can be adopted to simulate earthquake ground motion, sea wave, traffic loads, etc. In the presence of Poisson impulses, the PDF solution of the response of nonlinear oscillators is governed by the generalized Fokker–Planck–Kolmogorov (FPK) equation or so-called the Kolmogorov–Feller (KF) equation [1–4]. Only a few stationary PDF solutions have been obtained subjected to some special cases [5–7]. Most work has to be conducted by approximation methods, such as the perturbation method [1, 2], Petrov–Galerkin method [8], cell-to-cell mapping (path integration) technique [9–12], and finite difference approach [13, 14]. These methods can present adequate PDF solutions when the parameters (e.g., nonlinearity degree, impulse arrival rate, etc.) of the systems satisfy some requirements. Besides these approximate PDF solutions, the response moments of the systems have been extensively investigated by stochastic linearization methods [15–20] or the cumulant-neglect closure technique [21–23]. When the nonlinearity is weak and impulse arrival rate is high, these two methods can be applicable for the case of Poisson impulses.
Although the above methods contribute much to the study on the case of Poisson impulses, the PDF solutions have been less developed for general cases, especially for the tail region of the PDF solutions. In addition, the nonzero mean PDF solutions are scarcely mentioned in existing references in the case of Poisson impulses. In fact, some physical excitations, e.g., wind gusts or extreme waves, have nonzero mean in nature. Furthermore, some types of nonlinearity may lead to the nonzero mean response of nonlinear oscillators even excited by zero mean excitation [24].
In this paper, the nonzero mean PDF solution is developed with an exponential-polynomial closure (EPC) method by solving the generalized FPK equation [25–29]. The nonzero mean PDF solution was investigated in the case of Gaussian white noise [29]. Herein, the EPC method is extended to the case of Poisson impulses in a straightforward manner. Five nonlinear oscillators under additive Poisson impulses are analyzed in the case of nonzero mean response in numerical analysis. The nonzero mean response of nonlinear oscillators is formulated due to either nonlinearity type or nonzero mean amplitude of Poisson impulses. The first example is about a Duffing oscillator with a constant under zero mean Poisson impulses. The second example is about a Duffing oscillator under nonzero mean Poisson impulses. The third example is about a Duffing oscillator with an even order term in displacement under zero mean Poisson impulses. The fourth example is about a bimodal Duffing oscillator and the last example is about a nonlinear oscillator with the nonlinearity in velocity. The analysis shows that the PDFs obtained with the EPC method are the same as those obtained by the stochastic linearization method when the polynomial order equals 2 with the EPC method. The PDFs obtained with the stochastic linearization method differ significantly from the simulated results. When the polynomial order is 4 or 6, the PDFs obtained with the EPC method agree well with the simulated results, especially in the tail regions. The results further show that the nonzero mean PDF of the response is nonsymmetric about its mean unlike the case of the zero mean PDF solution.
2 EPC procedure
A single degree-of-freedom nonlinear oscillator can be expressed as
where X and \(\dot{X}\) are the response variables of the oscillator such as displacement and velocity, respectively. h 0 is the function of X and \(\dot{X}\). The functional form of h 0 is assumed to be deterministic; W(t) represents a process of Poisson impulses as follows:
where N(T) is the total number of impulses arriving in the time interval (−∞,T]. Y k is the amplitude of the kth impulse arriving at time τ k . δ(t) is Dirac delta function. Herein N(T) is assumed to yield the Poisson law with a constant impulse arrival rate λ. The impulse amplitudes Y k are independent and identically distributed (i.i.d.) random variables. Y k is also independent of the impulse arrival time τ k . When the arrival rate λ is constant and the impulse amplitudes Y k are i.i.d., the response of the oscillator becomes stationary [30]. Setting X=x 1 and \(\dot{X}=x_{2}\), Eq. (1) can be expressed as


The response vector {x 1,x 2}T is Markovian and the PDF solution of the response is equivalently governed by the following KF equations either in an integrodifferential form or in an infinite series form [4]


where E[•] denotes the expectation of (•). Furthermore, if only the stationary PDF solution is considered, the term on the left side of Eq. (5b) vanishes and Eq. (5b) is reduced to be

In the EPC method [25–29], an approximate PDF solution \(\stackrel{\sim}{p}(x_{1},x_{2};\mathbf{a})\) to Eq. (6) is assumed to be
where C is a normalization constant; exp{⋅} is an exponential function; \(\bf a\) is an unknown parameter vector containing N p entries. The polynomial Q n (x 1,x 2;a) is expressed as
which is an nth-degree polynomial in x 1 and x 2. It is also required that
Substituting \(\stackrel{\sim}{p}(x_{1},x_{2};\mathbf{a})\) for p(x 1,x 2) leads to the following residual error

Here, only the terms up to the fourth-order derivative are retained for analysis given that the contribution of higher order terms is small to the whole equation. It is expected that the approximate solution will work well when the neglected higher order terms are very small.
Substituting Eq. (7) into Eq. (10) leads to
where

Subsequently, another set of mutually independent functions H s (x 1,x 2) that span space \(\Re^{N_{p}}\) can be introduced to make the projection of F(x 1,x 2;a) on \(\Re^{N_{p}}\) vanish, which leads to
Selecting H s (x 1,x 2) as
where k=1,2,…,n; l=0,1,2,…,k and \(s=\frac{1}{2}(k+2)(k-1)+l+1\).
Numerical experience shows that a convenient and effective choice for f 1(x 1) and f 2(x 2) is the PDF obtained with stochastic linearization method or Gaussian closure method under Gaussian excitation with the same intensity λE[Y 2] as follows:


The integration in Eq. (13) can be easily evaluated with Gaussian random variables as follows:

where μ denotes mean value; σ denotes standard deviation; and n denotes nonnegative integer.
Finally nonlinear algebraic equations are established about the unknown parameters of the approximate PDF solution as given by Eq. (18) [28].

where \(\alpha_{ijqr\bar{i} \bar{j} \bar{q} \bar{r}}^{kl}\), \(\beta_{ijqr\bar{i} \bar{j}}^{kl}\), \(\gamma_{ijqr}^{kl}\), \(\eta_{ij}^{kl}\), and ψ kl are presented in the Appendix. The nonlinear algebraic equations can be solved by conventional Newton–Raphson method and the initial solution can be selected using the Gaussian PDF given by stochastic linearization method.
Furthermore, when Y is Gaussian, the values of the moments are evaluated by Eqs. (19)
where μ Y is the mean of Y and \(\sigma^{2}_{Y}\) is the variance of Y.
3 Numerical analysis
Five nonlinear oscillators under additive Poisson impulses are analyzed in the case of nonzero mean response. The nonzero mean response of nonlinear oscillators is formulated due to either nonlinearity type or nonzero mean amplitude of Poisson impulses. The first example is about a Duffing oscillator with a constant under zero mean Poisson impulses. The second example is about a Duffing oscillator under nonzero mean Poisson impulses. The third example is about a Duffing oscillator with an even order term in displacement under zero mean Poisson impulses. The fourth example is about a Duffing oscillator with a bimodal PDF of displacement and the last example is about a nonlinear oscillator with the nonlinearity in velocity. A Monte Carlo simulation (MCS) is also conducted and the simulation procedure follows the techniques introduced in [2, 16]. A sample size of 2×107 is adopted to provide adequate evaluation on the tail of the PDF solution.
3.1 Example 1
The first example is about a Duffing oscillator with a constant under zero mean Poisson impulses, which is given as
where W(t) is a process of Poisson impulses as expressed by Eq. (2) in which Y k are assumed to be Gaussian with zero mean. The system parameters are given as: c=0.1, k=1.0, ϵ=1.0, m=−1, λ=1.0, λE[Y 2]=1.0, E[Y]=0, σ Y =1 such that E[Y 2]=1, E[Y 3]=0 and E[Y 4]=3.
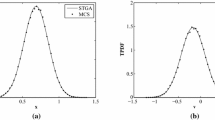
Figures 1(a) and 1(b) present the PDFs and logarithmic PDFs obtained with each method for displacement. The comparison shows that the result from EPC (n=2) is the same as that given by stochastic linearization method. Therefore, EPC (n=2) presents a Gaussian PDF. In Fig. 1(a), the PDF solution given by stochastic linearization method (i.e., EPC n=2) departs significantly from the simulated result (MCS). The difference is much more pronounced in the tail region as Fig. 1(b) shows. When the polynomial order increases to 6, the results from EPC method agree well with those from MCS. In particular, good agreement is also observed in the tails of the PDF solution as shown in Fig. 1(b).

Comparison of PDFs in example 1: (a) PDFs of displacement; (b) Logarithmic PDFs of displacement; (c) PDFs of velocity; (d) Logarithmic PDFs of velocity
As expected, the distribution of the PDF solution is shifted from zero mean for the PDF of displacement. This is caused by the addition of the constant m. It is also seen that the PDF solution is not symmetrically distributed about its mean, which is caused by the nonlinear term in the oscillator.
For the velocity, the PDF obtained from EPC (n=6) presents an improved result over that from EPC (n=2), even in the tails of the PDF, as shown in Figs. 1(c) and 1(d). For the PDF of velocity, the distribution is still symmetrical about zero mean. It shows that the symmetric distribution of the PDF of velocity is not affected by the nonlinear term.
3.2 Example 2
The second example is about a Duffing oscillator under nonzero mean Poisson impulses, which is presented as
where W(t) is a process of Poisson impulses as expressed by Eq. (2) in which Y k are assumed to be Gaussian with nonzero mean. The system parameters are given as: c=0.1, k=1.0, ϵ=1.0, λ=1.0, E[Y]=1, σ Y =1 such that E[Y 2]=2, E[Y 3]=4 and E[Y 4]=10. The effect of nonzero mean amplitude of Poisson impulses is considered with the EPC method. When the amplitude is Gaussian with nonzero mean, both E[Y] and E[Y 3] are retained in Eq. (10).
Similar conclusions can be made as the first case. Figures 2(a) through 2(d) show that the PDF solution given by EPC (n=2) (i.e., stochastic linearization method) differs much from MCS, especially in the tail region. Comparatively, EPC (n=6) agrees well with MCS even in the tail region. Because of the nonzero mean amplitude, the PDF distribution of displacement has positive mean and it is shifted from zero. For the PDF solution of velocity shown in Figs. 2(c) and 2(d), the symmetry and zero mean property are not influenced by the nonzero mean amplitude.

Comparison of PDFs in example 2: (a) PDFs of displacement; (b) Logarithmic PDFs of displacement; (c) PDFs of velocity; (d) Logarithmic PDFs of velocity
3.3 Example 3
This example is about a Duffing oscillator with an even order term in displacement under zero mean Poisson impulses, which is expressed as
where W(t) is a process of Poisson impulses as expressed by Eq. (2) in which Y k are assumed to be Gaussian with zero mean. An even order term in displacement is considered in this example. The system parameters are given as: c=0.1, k 1=1.0, k 2=2.0, k 3=1.0, λ=1.0, λE[Y 2]=1.0, E[Y]=0, σ Y =1 such that E[Y 2]=1, E[Y 3]=0 and E[Y 4]=3.
From Figs. 3(a) to 3(d), it is seen that the results from EPC (n=6) are in good agreement with MCS for the whole PDF distribution and the tail region. For the PDF of velocity, the PDF distribution is symmetrical about zero mean, which is not affected by the even order term in displacement.

Comparison of PDFs in example 3: (a) PDFs of displacement; (b) Logarithmic PDFs of displacement; (c) PDFs of velocity; (d) Logarithmic PDFs of velocity
The comparison shows that similar conclusions can be drawn as those of the previous cases. The strong nonlinearity induces the large difference from Gaussianity in the tail of the PDF solution for displacement. The PDF of displacement has nonzero mean, which is nonsymmetric about its mean. The PDF solution of velocity presents a zero-mean symmetric shape, which is not affected by the nonlinearity type of displacement.
3.4 Example 4
Example 4 is about a bimodal Duffing oscillator. A negative linear restoring force leads to the bimodal PDF of the response [31, 32]. The nonlinear oscillator is given below:
where W(t) is a process of Poisson impulses as expressed by Eq. (2) in which Y k are assumed to be Gaussian with a nonzero mean. The system parameters are given as: c=0.1, k=1.0, ϵ=1.0, λ=1.0, E[Y]=1, σ Y =1 such that E[Y 2]=2, E[Y 3]=4 and E[Y 4]=10. Figures 4(a) and 4(b) show the PDFs of displacement obtained with each method. EPC (n=2) differs much from the simulated result, which means the PDF of displacement is highly non-Gaussian. When a complete sixth-order polynomial is used (EPC n=6), good agreement is made between EPC (n=6) and the simulated result. For the PDF of velocity, EPC (n=6) presents an improvement on the whole PDF and the tail region as Figs. 4(c) and 4(d) show.

Comparison of PDFs in example 4: (a) PDFs of displacement; (b) Logarithmic PDFs of displacement; (c) PDFs of velocity; (d) Logarithmic PDFs of velocity
The bimodal PDF of displacement is formulated as Figs. 4(a) and 4(b) show. In the presence of the nonzero Poisson impulses, one peak is much larger than the other peak as shown in Fig. 4(a). In this case, the PDF solution of velocity still presents a unimodal and symmetric distribution as Figs. 4(c) and 4(d) show.
3.5 Example 5
The last example considers the effect of nonlinear term in velocity. The following oscillator is studied:
where W(t) is a process of Poisson impulses as expressed by Eq. (2) in which Y k are assumed to be Gaussian with nonzero mean. The system parameters are presented as: c=0.1, μ=0.01, k=1.0, ϵ=1.0, λ=1.0, E[Y]=1, σ Y =1 such that E[Y 2]=2, E[Y 3]=4 and E[Y 4]=10.
The nonlinearity in velocity is considered in this example. Figures 5(a) and 5(b) show EPC (n=2) differs significantly from the simulated result in the case of displacement. When a complete fourth-order polynomial is used in the EPC method, EPC (n=4) presents good agreement with the simulated one. In the case of velocity, the PDF of velocity is well evaluated by EPC (n=4) as Figs. 5(c) and 5(d). The PDF of velocity shows a little nonsymmetric distribution. The use of a complete sixth-order polynomial is also studied with the EPC method, which shows disconvergence on the PDF solution.

Comparison of PDFs in example 5: (a) PDFs of displacement; (b) Logarithmic PDFs of displacement; (c) PDFs of velocity; (d) Logarithmic PDFs of velocity
4 Conclusions
An EPC method is extended to analyze the stationary nonzero mean PDF solution of nonlinear oscillators under additive Poisson impulses. The EPC solution procedure is developed to solve the generalized FPK equation or so-called the KF equation. Five examples are considered in numerical analysis to show the effectiveness of the EPC method. The nonzero mean response of nonlinear oscillators is made due to either nonlinearity type or nonzero mean amplitude of Poisson impulses. The analysis shows that the results from EPC (n=2) are the same as those given by stochastic linearization method. The PDFs given by stochastic linearization method (i.e., EPC n=2) differ significantly from those of Monte Carlo simulation, especially in the tail region. When the polynomial order equals 4 or 6, the PDFs obtained with the EPC method are in good agreement with the simulation results. This agreement is also observed in the tail regions of the obtained PDFs. The nonzero mean PDF of displacement is nonsymmetrically distributed. On the other hand, the PDF of velocity presents a zero-mean symmetric shape when only nonlinearity in displacement exists in these systems.
References
Roberts, J.B.: System response to random impulses. J. Sound Vib. 24, 23–34 (1972)
Cai, G.Q., Lin, Y.K.: Response distribution of non-linear systems excited by non-Gaussian impulsive noise. Int. J. Non-Linear Mech. 27, 955–967 (1992)
Di Paola, M., Pirrotta, A.: Direct derivation of corrective terms in SDE through nonlinear transformation on Fokker–Planck equation. Nonlinear Dyn. 36, 349–360 (2004)
Pirrotta, A.: Multiplicative cases from additive cases: extension of Kolmogorov–Feller equation to parametric Poisson white noise processes. Probab. Eng. Mech. 22, 127–135 (2007)
Vasta, M.: Exact stationary solution for a class of non-linear systems driven by a non-normal delta-correlated process. Int. J. Non-Linear Mech. 30, 407–418 (1995)
Proppe, C.: The Wong-Zakai theorem for dynamical systems with parametric Poisson white noise excitation. Int. J. Eng. Sci. 40, 1165–1178 (2002)
Proppe, C.: Exact stationary probability density functions for non-linear systems under Poisson white noise excitation. Int. J. Non-Linear Mech. 38, 557–564 (2003)
Köylüoǧlu, H.U., Nielsen, S.R.K., Iwankiewicz, R.: Reliability of non-linear oscillators subject to Poisson driven impulses. J. Sound Vib. 176, 19–33 (1994)
Köylüoǧlu, H.U., Nielsen, S.R.K., Iwankiewicz, R.: Response and reliability of Poisson-driven systems by path integration. J. Eng. Mech. 121, 117–130 (1995)
Köylüoǧlu, H.U., Nielsen, S.R.K., Çakmak, A.Ş.: Fast cell-to-cell mapping (path integration) for nonlinear white noise and Poisson driven systems. Struct. Saf. 17, 151–165 (1995)
Di Paola, M., Santoro, R.: Non-linear systems under Poisson white noise handled by path integral solution. J. Vib. Control 14, 35–49 (2008)
Di Paola, M., Santoro, R.: Path integral solution for non-linear system enforced by Poisson white noise. Probab. Eng. Mech. 23, 164–169 (2008)
Wojtkiewicz, S.F., Johnson, E.A., Bergman, L.A., Spencer, B.F. Jr., Grigoriu, M.: Stochastic response to additive Gaussian and Poisson white noises. In: Spencer, B.F., Johnson, E.A. (eds.) Stochastic Structural Dynamics, 4th Int. Conf. on Stochastic Structural Dynamics, Notre Dame, August 1998, pp. 53–60. Balkema, Rotterdam (1999)
Wojtkiewicz, S.F., Johnson, E.A., Bergman, L.A., Grigoriu, M., Spencer, B.F. Jr.: Response of stochastic dynamical systems driven by additive Gaussian and Poisson white noise: Solution of a forward generalized Kolmogorov equation by a spectral finite difference method. Comput. Methods Appl. Mech. Eng. 168, 73–89 (1999)
Spanos, P.D.: Stochastic linearization in structural dynamics. Appl. Mech. Rev. 34, 1–8 (1981)
Tylikowski, A., Marowski, W.: Vibration of a non-linear single degree of freedom system due to Poissonian impulse excitation. Int. J. Non-Linear Mech. 21, 229–238 (1986)
Grigoriu, M.: Equivalent linearization for Poisson white noise input. Probab. Eng. Mech. 10, 45–51 (1995)
Sobiechowski, C., Socha, L.: Statistical linearization of the Duffing oscillator under non-Gaussian external excitation. J. Sound Vib. 231, 19–35 (2000)
Proppe, C.: Equivalent linearization of MDOF systems under external Poisson white noise excitation. Probab. Eng. Mech. 17, 393–399 (2002)
Proppe, C.: Stochastic linearization of dynamical systems under parametric Poisson white noise excitation. Int. J. Non-Linear Mech. 38, 543–555 (2003)
Iwankiewicz, R., Nielsen, S.R.K., Thoft-Christensen, P.: Dynamic response of non-linear systems to Poisson-distributed pulse trains: Markov approach. Struct. Saf. 8, 223–238 (1990)
Iwankiewicz, R., Nielsen, S.R.K.: Dynamic response of non-linear systems to Poisson-distributed random impulses. J. Sound Vib. 156, 407–423 (1992)
Di Paola, M., Falsone, G.: Non-linear oscillators under parametric and external Poisson pulses. Nonlinear Dyn. 5, 337–352 (1994)
Roberts, J.B., Spanos, P.D.: Random Vibration and Statistical Linearization. Dover, Mineola (2003)
Er, G.K.: A new non-Gaussian closure method for the PDF solution of nonlinear random vibrations. In: Murakami, H., Luco, J.E. (eds.) Engineering Mechanics: A Force for the 21st Century, 12th Engrg. Mech. Conf., San Diego, May 1998, pp. 1403–1406. ASCE, Reston (1998)
Er, G.K.: An improved closure method for analysis of nonlinear stochastic systems. Nonlinear Dyn. 17, 285–297 (1998)
Er, G.K., Zhu, H.T., Iu, V.P., Kou, K.P.: PDF solution of nonlinear oscillators subject to multiplicative Poisson pulse excitation on displacement. Nonlinear Dyn. 55, 337–348 (2009)
Zhu, H.T., Er, G.K., Iu, V.P., Kou, K.P.: EPC procedure for PDF solution of nonlinear oscillators excited by Poisson white noise. Int. J. Non-Linear Mech. 44, 304–310 (2009)
Er, G.K., Zhu, H.T., Iu, V.P., Kou, K.P.: Nonzero mean PDF solution of nonlinear oscillators under external Gaussian white noise. Nonlinear Dyn. 62, 743–750 (2010)
Hu, S.L.J.: Responses of dynamic systems excited by non-Gaussian pulse processes. J. Eng. Mech. 119, 1818–1827 (1993)
Wojtkiewicz, S.F., Spencer, B.F. Jr., Bergman, L.A.: On the cumulant-neglect closure method in stochastic dynamics. Int. J. Non-Linear Mech. 31, 657–684 (1996)
Anh, N.D., Hai, N.Q.: A technique of closure using a polynomial function of Gaussian process. Probab. Eng. Mech. 15, 191–197 (2000)
Acknowledgements
This research is jointly supported by the National Natural Science Foundation of China (Grant Nos. 51008211, 51178308) and the Self-Innovation Foundation of Tianjin University (Grant No. 60302040).
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix








where m=0,1,2,….
Rights and permissions
About this article
Cite this article
Zhu, H.T. Nonzero mean response of nonlinear oscillators excited by additive Poisson impulses. Nonlinear Dyn 69, 2181–2191 (2012). https://doi.org/10.1007/s11071-012-0418-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-012-0418-y