
Abstract
In this paper, a three-neuron artificial neural network model with distributed delays is considered. Its dynamics is investigated in term of the linear stability analysis and Hopf bifurcation analysis. By regarding the sum of two delays as a bifurcation parameter and analyzing the associated characteristic equation, we find that Hopf bifurcation occurs when the bifurcation parameter passes through some certain values. Some explicit formulae for determining the stability and the direction of the Hopf bifurcation periodic solutions are derived by using the normal form method and center manifold theory. Finally, computer simulations are given to support the theoretical predictions.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the last three decades, there has been increasing interest in the dynamical properties of neural networks due to their important applications in many fields such as pattern recognition, classification, optimization, signal and image processing, solving nonlinear algebraic equations, associative memories, cryptography and so on [1]. Many rich mathematical investigations and interesting results on neural networks have been available in the literature (see [2–14]). In particular, the Hopf bifurcation behavior is of great interest. In order to obtain a deep and clear understanding of the Hopf bifurcation nature of neural networks, many authors have focused on the studying of simplified neural networks with two, three or four neurons. For instance, Zou et al. [15] considered the stability and Hopf bifurcation of a three-unit neural network with two delays, Shayer and Campbell [16] studied the stability, bifurcation, and multistability in a system of two coupled neurons with multiple time delays, Guo and Huang [17] focused on the linear stability and Hopf bifurcation of a two-neuron network with three delays, Liao et al. [18] analyzed the stability and bifurcation of a tri-neuron model with time delay, Wang and Jian [3] gave a detailed study on the stability and Hopf bifurcation for a four-neuron BAM neural network with distributed delays, Mao and Hu [19] made a detailed discussion on Hopf bifurcation of a four-neuron network with multiple time delays. Majee and Roy [20] dealt with the temporal dynamics of two-neuron continuous network model with time delay. For more work on this aspect, one can see [2, 21–39]. In 2008, Gupta et al. [40] considered the following three neurons network with distributed delay
where \(p>0\) is the delay rate of neurons. \(a_{ij}\) is the weight of synaptic connections from neuron j to neuron i and k is the delay kernel assumed to satisfy the following conditions:
The general form of delay kernel k(s) takes the form:
where \(\beta \) is a parameter which stands for the rate of decay of the effects of past memories and it is a positive real number. \(n = 0\) represents weak kernel, whereas \(n =1\) represents strong kernel.
When \(n = 0\), then the delay kernel k(s) reads as
Then system (1.1) takes the form
To make the calculation more tractable, Gupta et al. [40] make the following assumption:
Then system (1.2) becomes
With the aid of some auxiliary variables, Gupta et al. [40] focused on the asymptotic stability, orbits stability of Hopf bifurcation periodic solution of system (1.3).
We must point out that in real life, there is transmission delay of the signal along the axon of the neuron. Motivated by the viewpoint, we can modify system (1.3) as follows:
Here we wold like to point out that human brain is made up of a large number of cells neurons and their interaction, artificial neural networks are information processing systems which have some common characteristics with biological neural networks. System (1.4) can play a important role in the control of regular dynamical functions such as breathing and hear beating of human.
In this paper, we consider the model (1.4). In order to establish the main results for model (1.4), it is necessary to make the following assumption:
This paper is organized as follows. In Sect. 2, the stability of the equilibrium and the existence of Hopf bifurcation at the equilibrium are analyzed. In Sect. 3, the direction of Hopf bifurcation and the stability and periods of bifurcating periodic solutions on the center manifold are determined. In Sect. 4, numerical simulations are given to illustrate the validity of the main results. Some main conclusions are drawn in Sect. 5.
2 Stability of the Equilibrium and Local Hopf Bifurcations
Let
then system (1.4) takes the following equivalent form:
For notational and computational simplicity, we can rewrite system (2.2) as follows:
From the paper [40], if the following condition
holds, then (2.3) has a unique equilibrium \(E(x_1^*, x_2^*, x_3^*, x_4^*, x_5^*, x_6^*)\). The linear equation of (2.3) at \(E(x_1^*, x_2^*,\, x_3^*, x_4^*, x_5^*, x_6^*)\) takes the form:
Then the associated characteristic equation of (2.4) is given by
which leads to the following form:
where
Let \(\lambda =i\omega _0,\tau =\tau _0\), and substituting this into (2.6), for the sake of simplicity, denote \(\omega _0\) and \(\tau _0\) by \(\omega \) and \(\tau \), respectively, then (2.6) becomes
Separating the real and imaginary parts leads to
Squaring both sides of (2.8) and (2.9), and adding them up gives
which is equivalent to
where
Let \(z =\theta ^2\). Then (2.10) becomes
If \(\theta _0<0\), then (2.11) has at least one positive root. Suppose that Eq. (2.11) has positive roots. Without loss of generality, we assume that (2.11) has six positive roots, denoted by \(z_1, z_2, z_3, z_4, z_5, z_6\), Then (2.10) has six positive roots as follows
Thus, if we denote
where \(k =1,2,3,\ldots ,6\) and \(j=0,1,2,\ldots \). Then \(\pm i\omega _k\) are a pair of purely imaginary roots of Eq. (2.6) with \(\tau = \tau _k^{(j)}\). Obviously, in view of (2.13), the sequence \(\{\tau _k^{(j)}\}_{j=0}^{+\infty }\) is increasing, and
Then we can define
Note that when \(\tau =0,\) (2.6) becomes
All roots of (2.15) have a negative real part if the following well-known Routh-Hurwitz criteria hold.
In order to obtain the main results in this paper, it is necessary to make the following assumptions:
(H3) If (2.16)–(2.21) hold, (2.15) have six roots with negative real parts when \(\tau =0,\) (2.1) is stable near the equilibrium.
\((\text{ H }4) \text{ Re }\left( \frac{d\lambda }{d\tau }\right) \Big |_{\tau =\tau _0}\ne 0\).
Taking the derivative of \(\lambda \) with respect to \(\tau \) in (2.6), it is easy to obtain:
Then
Thus
where
In order to investigate the distribution of roots of the transcendental equation (2.6), the following Lemma that is stated in [41] is useful.
Lemma 2.1
[41] For the transcendental equation
as \((\tau _1,\tau _2,\tau _3,\ldots ,\tau _m)\) vary, the sum of orders of the zeros of \(P(\lambda , e^{-\lambda \tau _1},\ldots ,e^{-\lambda \tau _m})\) in the open right half plane can change and only if a zero appears on or crosses the imaginary axis.
Remark 2.1
Lemma 2.1 is a generalization of the Lemma in Cooke and Grossman [42] in which a second order degree exponential polynomial was investigated.
In view of Lemma 2.1, it is easy to obtain the following results:
Theorem 2.2
If (H1)–(H4) hold, then
-
(i)
for system (2.3), its equilibrium \(E(x_1^*, x_2^*, x_3^*, x_4^*, x_5^*, x_6^*)\) is asymptotically stable for \(\tau \in [0, \tau _0)\)
-
(ii)
system (2.3) undergoes a Hopf bifurcation at the equilibrium \(E(x_1^*, x_2^*, x_3^*, x_4^*, x_5^*, x_6^*)\) when \(\tau = \tau _0\), i.e., system (2.3) has a branch of periodic solutions bifurcating from the equilibrium \(E(x_1^*, x_2^*, x_3^*, x_4^*, x_5^*, x_6^*)\) solution near \(\tau = \tau _0\).
3 Direction and Stability of the Hopf Bifurcation
In the previous section, we have obtained some conditions to ensure that system (2.3) undergoes a single Hopf bifurcation at the equilibrium \(E(x_1^*, x_2^*, x_3^*, x_4^*, x_5^*, x_6^*)\) when \(\tau =\tau _1+\tau _2\) passes through certain critical values. In this section, we shall study the direction, stability, and the period of bifurcating periodic solutions. The method we used is based on normal form method and the center manifold theory introduced by Hassard et al. [43].
Without loss of generality, we denote the critical value \(\tau _i(i = 0, 1, 2, \ldots )\) by \(\tilde{\tau } =\tilde{\tau }_1 + \tilde{\tau }_2\) at which system (2.3) undergoes a Hopf bifurcation, where \(\tilde{\tau }_1<\tilde{\tau }_2\) and \(\tau = \tilde{\tau }+ \mu =(\tilde{\tau }_1 + \mu )+\tilde{\tau }_2\), then \(\mu = 0\) is Hopf bifurcation value of system (2.3). We choose the phase space as \(C = C([-\tilde{\tau }_2, 0],C^6)\), where for convenience in computation we use \(C^6\) instead of \({\mathbb {R}}^6\).
Its linear part is given by
Its non-linear part is given by
where
and
Denote
For convenience, denote \(C[-\tilde{\tau }_2, 0]\) by \(C^0[-\tilde{\tau }_2, 0]\).
For \(\varphi (\theta )=(\varphi _1(\theta ), \varphi _2(\theta ), \varphi _3(\theta ), \varphi _4(\theta ), \varphi _5(\theta ), \varphi _6(\theta ))^T\in {C([-\tilde{\tau }_2, 0], {\mathbb {R}}^6)}\), define a family of operators
where \(L_\mu \) is a one-parameter family of bounded linear operators in \(C([-\tilde{\tau }_2, 0], {\mathbb {R}}^6)\rightarrow {{\mathbb {R}}^6}\) and
By the Riesz representation theorem, there exists a matrix whose components are bounded variation functions \(\eta (\theta ,\mu )\) in \([-\tilde{\tau }_2, 0]\rightarrow {{\mathbb {R}}^{6^2}}\), such that
In fact, choosing
where \(\delta (\theta )\) is Dirac function, then (3.4) is satisfied. For \((\varphi _1, \varphi _2, \varphi _3, \varphi _4, \varphi _5, \varphi _6 )\in {(C^1[-\tilde{\tau }_2, 0], {\mathbb {R}}^6)}\), define
and
Then (2.3) is equivalent to the abstract differential equation
where \(u=(u_1, u_2, u_3, u_4, u_5, u_6)^T,\,u_t(\theta )=u(t+\theta ),\theta \in [-\tilde{\tau }_2, 0]\).
For \(\psi \in {C([0, \tilde{\tau }_2], ({\mathbb {R}}^6)^*)}\), define
For \(\phi \in {C([-\tilde{\tau }_2, 0], {\mathbb {R}}^6)}\) and \(\psi \in {C([0, \tilde{\tau }_2], ({\mathbb {R}}^6)^*)}\), define the bilinear form
where \(\eta (\theta )=\eta (\theta ,0)\). We have the following result on the relation between the operators \(A=A(0)\) and \(A^*\).
Lemma 3.1
\(A=A(0)\) and \(A^*\) are adjoint operators.
Proof
Let \(\phi \in {C^1([-\tilde{\tau }_2, 0], {\mathbb {R}}^6)}\) and \(\psi \in {C^1([0, \tilde{\tau }_2], ({\mathbb {R}}^6)^*)}\). It follows from (3.10) and the definitions of \(A=A(0)\) and \(A^*\) that
This shows that \(A=A(0)\) and \(A^*\) are adjoint operators and the proof is complete. \(\square \)
By the discussions in Sect. 2, we know that \(\pm {i\omega _0}\) are eigenvalues of A(0), and they are also eigenvalues of \(A^*\) corresponding to \(i\omega _0\) and \(-i\omega _0\), respectively. We have the following result.
Lemma 3.2
The vector
where
is the eigenvector of A(0) corresponding to the eigenvalue \(i\omega _0\), and
where
is the eigenvector of \(A^*\) corresponding to the eigenvalue \(-i\omega _0\), moreover, \(\langle q^*(s), q(\theta )\rangle =1\), where
Proof
Let \(q(\theta )\) be the eigenvector of A(0) corresponding to the eigenvalue \(i\omega _0\) and \(q^*(s)\) be the eigenvector of \(A^*\) corresponding to the eigenvalue \(-i\omega _0\), namely, \(A(0)q(\theta )=i\omega _0q(\theta )\) and \(A^*q(s)=-i\omega _0q^*(s)\). From the definitions of A(0) and \(A^*\), we have \(A(0)q(\theta )=dq(\theta )/d\theta \) and \(A^*q(s)=-\frac{dq^*(s)}{ds}\). Thus, \(q(\theta )=q(0)e^{i\omega _0\theta }\) and \(q^*(s)=q(0)e^{i\omega _0s}\). In addition,
That is
Therefore, we can easily obtain
On the other hand,
Namely,
Therefore, we can easily obtain
In the sequel, we shall verify that \(\langle q^*(s), q(\theta ) \rangle =1\). In fact, from (3.10), we have \(\langle q^*(s), q(\theta )\rangle \)
where
Next, we use the same notations as those in Hassard, Kazarinoff and Wan [43], and we first compute the coordinates to describe the center manifold \(C_0\) at \(\mu =0\). Let \(u_t\) be the solution of Eq.(2.3) when \(\mu =0\).
Define
on the center manifold \(C_0\), and we have
where
and z and \(\bar{z}\) are local coordinates for center manifold \(C_0\) in the direction of \(q^*\) and \(\bar{q}^*\). Noting that W is also real if \(x_t\) is real, we consider only real solutions. For solutions \(x_t\in {C_0}\) of (2.3),
That is
where
Hence, we have
where
Noticing that
and
we have
From (3.21) and (3.22), we can obtain the expression of \(g(z,\bar{z})\) as follows
It is easy to obtain
Since
in \(g_{21}\), we still need to compute them. In view of (3.8) and (3.9), we have
where
Comparing the coefficients, we obtain
For \(\theta \in [-\tilde{\tau }_2, 0)\),
Comparing the coefficients of (3.24) with (3.27) gives that
From (3.25), (3.28) and the definition of A, we get
Noting that \(q(\theta )=q(0)e^{i\omega _0\theta }\), we have
where \(E_1\) is a constant vector. Similarly, from (3.26), (3.29) and the definition of A, we have
where \(E_2\) is a constant vector.
In what follows, we shall seek appropriate \(E_1,\, E_2\) in (3.31), (3.33), respectively. It follows from the definition of A and (3.28), (3.29) that
and
where \(\eta (\theta )=\eta (0, \theta )\). It follows from (3.25) that
where
From (3.26), we have
where
Noting that
and substituting (3.31) and (3.36) into (3.34), we have
That is
Hence,
where
Similarly, substituting (3.32) and (3.37) into (3.35), we have
That is
Hence,
where
From (3.31), (3.33), (3.42), (3.45), we can calculate \(g_{21}\) and derive the following values:
These formulaes give a description of the Hopf bifurcation periodic solutions of (2.3) at \(\tau =\tau _0\) on the center manifold. From the discussion above, we have the following result: \(\square \)
Theorem 3.3
For system (2.3), if (H1)–(H4) hold, the periodic solution is supercritical (subcritical) if \(\mu _2>0\) (\(\mu _2<0\)); The bifurcating periodic solutions are orbitally asymptotically stable with asymptotical phase (unstable) if \(\beta _2<0\) (\(\beta _2>0\)); The periods of the bifurcating periodic solutions increase (decrease) if \(T_2>0\) (\(T_2<0\)).
Remark 3.1
In [44], authors considered the stability switches and bifurcation for a neural networks with continuous delay and strong kernel by regarding the mean time delay as bifurcation parameter. In [45], authors discussed the delay-dependent asymptotic stability for neural networks with distributed delays by employing suitable Lyapunov functionals and delay-dependent criteria. In [46], authors analyzed bifurcation behavior for a two-neuron system with distributed delays by applying frequency domain method. All the analysis methods above are different from those in this paper. Thus our work complements the previous studies.
4 Numerical Examples
To illustrate the analytical results, we consider the following special case of system (2.3).
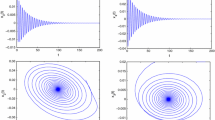
which has a unique steady state E(0, 0, 0, 0, 0, 0). By means of Matlab 7.0, we obtain \(\omega _0 \approx 0.9059, \tau _0\approx 0.6002, \lambda ^{'}(0) \approx 3.4023-2.6576i\). Thus we can compute these values as follows: \(c_1(0)\approx -4.1128-16 5.5123i, \mu _2 \approx 2.0213> 0, \beta _2\approx -8.2256<0, T_2\approx 16.4719\). Then all the conditions indicated in Theorem 2.2 hold true. From Theorem 2.1, we know that the zero steady state of system (4.1) is asymptotically stable when \(\tau _1+\tau _2 \in [0, 0.6)\) which is illustrated by the numerical simulations shown in Figs. 1, 2 and 3 in which \(\tau _1 = 0.3\) and \(\tau _2 = 0.2\). When \(\tau _1+\tau _2\) is increased to the critical value 0.6, the equilibrium E(0, 0, 0, 0, 0, 0) loses its stability and a Hopf bifurcation occurs. Since \(\mu _2 > 0\) and \(\beta _2 < 0\) it follows from Theorem 3.3 that the Hopf bifurcation is supercritical and bifurcating periodic solution is asymptotically stable which is depicted in Figs. 4, 5 and 6.



Dynamic behavior of system (4.1): projection on \(x_1-x_2, x_1-x_3, x_1-x_4, x_1-x_5, x_1-x_6, x_2-x_5, x_2-x_6, x_3-x_4, x_3-x_5, x_3-x_6, x_4-x_5, x_4-x_6\) plane, respectively. A Matlab simulation of the asymptotically stable origin to system (4.1) with \(\tau _1=0.3, \tau _2=0.2\) and \(\tau _1 + \tau _2 = \tau = 0.5 < \tau _0\approx 0.6002\). The initial value is (0.1, 0.1, 0.1, 0.1, 0.1, 0.1)


Dynamic behavior of system (4.1): projection on \(x_1-x_2-x_3, x_1-x_2-x_5, x_1-x_2-x_6, x_1-x_3-x_5, x_1-x_3-x_6, x_1-x_4-x_5, x_1-x_4-x_6, x_2-x_4-x_5, x_2-x_4-x_6, x_2-x_5-x_6, x_3-x_5-x_6, x_4-x_5-x_6\) space, respectively. A Matlab simulation of the asymptotically stable origin to system (4.1) with \(\tau _1=0.3, \tau _2=0.2\) and \(\tau _1 + \tau _2 = \tau = 0.5 < \tau _0\approx 0.6002\). The initial value is (0.1, 0.1, 0.1, 0.1, 0.1, 0.1)



Dynamic behavior of system (4.1): projection on \(x_1-x_2-x_3, x_1-x_2-x_5, x_1-x_2-x_6, x_1-x_3-x_5, x_1-x_3-x_6, x_1-x_4-x_5, x_1-x_4-x_6, x_2-x_4-x_5, x_2-x_4-x_6, x_2-x_5-x_6, x_3-x_5-x_6, x_4-x_5-x_6\) space, respectively. A Matlab simulation of the Hopf bifurcation of system (4.1) with \(\tau _1=0.8, \tau _2=0.3\) and \(\tau _1 + \tau _2 = \tau = 1.1 > \tau _0\approx 0.6002\). The initial value is (0.1, 0.1, 0.1, 0.1, 0.1, 0.1)


Dynamic behavior of system (4.1): projection on \(x_1-x_2-x_3, x_1-x_2-x_5, x_1-x_2-x_6, x_1-x_3-x_5, x_1-x_3-x_6, x_1-x_4-x_5, x_1-x_4-x_6, x_2-x_4-x_5, x_2-x_4-x_6, x_2-x_5-x_6, x_3-x_5-x_6, x_4-x_5-x_6\) space, respectively. A Matlab simulation of the Hopf bifurcation of system (4.1) with \(\tau _1=0.8, \tau _2=0.3\) and \(\tau _1 + \tau _2 = \tau = 1.1 > \tau _0\approx 0.6002\). The initial value is (0.1, 0.1, 0.1, 0.1, 0.1, 0.1)
5 Conclusions
In this paper, we have investigated three-neuron artificial neural network model with distributed delays. Using Hopf bifurcation theory and numerical method of functional differential equation, we have analyzed the local stability of the equilibrium \(E(x_1^*, x_2^*, x_3^*, x_4^*, x_5^*, x_6^*)\) and oscillatory behavior of the system. We have showed that if some suitable conditions hold and \(\tau \in [0, \tau _0)\), then the equilibrium \(E(x_1^*, x_2^*, x_3^*, x_4^*, x_5^*, x_6^*)\) of system (2.3) is asymptotically stable and unstable when \(\tau >\tau _0\). It is also showed that if some other suitable conditions are fulfilled and when the delay \(\tau \) increases, the equilibrium loses its stability and a sequence of Hopf bifurcations occur around \(E(x_1^*, x_2^*, x_3^*, x_4^*, x_5^*, x_6^*)\), i.e., a family of periodic orbits bifurcate from the equilibrium \(E(x_1^*, x_2^*, x_3^*, x_4^*, x_5^*, x_6^*)\). In addition, explicit algorithm for determining the direction of Hopf bifurcation and the stability of the bifurcating periodic orbits are derived by applying the normal form theory and the center manifold theorem. Numerical simulation results are agreeable with the theoretical findings. In addition, we would like to point out that system (2.3) is obtained using the weak kernel. If we use the general kernel, then it is difficult for us to simplify system (1.4) by the similar variable changes (see (2.1)), then our results obtained in this paper would not hold true. We leave this topic for future work.
References
Kaslik E, Sivasundaram S (2011) Multiple periodic solutions in impulsive hybird neural networks with delays. Appl Math Comput 217:4890–4899
Wang BX, Jian JG (2010) Stability and Hopf bifurcation analysis on a four-neuron BAM neural network with distributed delays. Commun Nonlinear Sci Numer Simul 15:189–204
Yuan Y, Campbell SA (2004) Stability and synchronization of a ring of identical cells with delayed coupling. J Dyn Differ Equ 16:709–744
Campbell SA, Yuan Y, Bungay SD (2005) Equivariant Hopf bifurcation in a ring of identical cells with delayed coupling. Nonlinearity 18:2827–2846
Guo SJ, Chen YM, Wu JH (2008) Two parameter bifurcations in a network of two neurons with multiple delays. J Differ Equ 244:444–486
Wei JJ, Velarde MG (2004) Bifurcation analysis and existence of periodic solutions in a simple neural network delays. Chaos 14:940–953
Wu JH (1998) Symmetric functional differential equations and neural networks with memory. Trans Am Math Soc 350:4799–4838
Yuan Y, Wei JJ (2006) Multiple bifurcation analysis in a neural network model with delays. Int J Bifurc Chaos 16:2903–2913
Song YL (2012) Spatio-temporal patterns of Hopf bifurcating periodic oscillations in a pair of identical tri-neuron network loops. Commun Nonlinear Sci Numer Simul 17:943–952
Xiao M, Zheng WX, Cao JD (2013) Frequency domain approach to computational analysis of bifurcation and periodic solution in a two-neuron network model with distributed delays and self-feedbacks. Neurocomputing 99:206–213
Hajihosseini A, Lamooki GRR, Beheshti B, Maleki F (2010) The Hopf bifurcation analysis on a time-delayed recurrent neural network in the frequency domain. Neurocomputing 73:991–1005
Marichal RL, Gonz’alez EJ, Marichal GN (2012) Hopf bifurcation stability in Hopfield neural networks. Neural Netw 36:51–58
Xu CJ, Tang XH, Liao MX (2010) Frequency domain analysis for bifurcation in a simplified tri-neuron BAM network model with two delays. Neural Netw 23:872–880
Zhang CR, Zheng BD (2007) Stability and bifurcation of a two-dimension discrete neural network model with multi-delays. Chaos Solitons Fractals 31:1232–1242
Zou SF, Huang LH, Chen YM (2006) Linear stability and Hopf bifurcation in a three-unit neural network with two delays. Neurocomputing 70:219–228
Shayer LP, Campbell SA (2000) Stability, bifurcation, and multistability in a system of two coupled neurons with multiple time delays. SIAM J Appl Math 61:673–700
Guo SJ, Huang LH (2004) Linear stability and Hopf bifurcation in a two-neuron network with three delays. Int J Bifurc Chaos 14:2799–2810
Liao XF, Guo ST, Li CD (2007) Stability and bifurcation analysis in tri-neuron model with time delay. Nonlinear Dyn 49:319–345
Mao XC, Hu HY (2009) Hopf bifurcation analysis of a four-neuron network with multiple time delays. Nonlinear Dyn 55:95–112
Majee NC, Roy AB (1997) Temporal dynamics of two-neuron continuous network model with time delay. Appl Math Model 21:673–679
Cao JD, Wang L (2000) Periodic oscillatory solution of bidirectional associative memory networks with delays. Phys Rev E 61:1825–1828
Cao JD, Zhou D (1998) Stability analysis of delayed cellular neural networks. Neural Netw 51:1601–1605
Zhu HY, Huang LH (2007) Stability and bifurcation in a tri-neuron network model with discrete and distributed delays. Comput Math Appl 188:1742–1756
Ruan SG, Fillfil RS (2004) Dynamics of a two-neuron system with discrete and distributed delays. Physica D 191:323–342
Hopfield JJ (1984) Neurons with graded response have collective computional properties like those of two-state neurons. Proc Natl Acad Sci USA 81:3088–3092
Liao XF, Chen GR (2001) Local stability, Hopf and resonant codimension-two bifurcation in a harmonic oscillator with two time delays. Int J Bifurc Chaos 11:2105–2121
Wu JH (2001) Introduction to neural dynamics and signal transmission delay. Walter de Cruyter, Berlin
Guo SJ, Huang LH (2005) Periodic oscillation for a class of neural networks networks with variable coefficients. Nonlinear Anal Real World Appl 6:545–561
Wei JJ, Ruan SG (1999) Stability and bifurcation in a neural network model with two delays. Physica D 130:255–272
Compell SA, Ruan SG, Wei JJ (1999) Qualitative analysis of a neural network model with multiple time delays. Int J Bifurc Chaos 9:1585–1595
Guo SJ, Huang LH (2003) Hopf bifurcating periodic orbits in a ring of neurons with delays. Physica D 183:19–44
Wei JJ, Yuan Y (2005) Sychronized Hopf bifurcation analysis in a neural network model with delays. J Math Anal Appl 312:205–229
Olien L, B’elair J (1997) Bifurcations, stability, and monotonicity properties of a delayed neural network model. Physica D 102:349–363
Liao XF, Wong KW, Wu ZF (2001) Bifurcations analysis ON a two-neuron system with distributed delays. Physica D 149:123–141
Yu WW, Cao JD (2006) Stability and Hopf bifurcation on a four-neuron BAM neural network with delays. Phys Lett A 351:64–78
Huang CX, Huang LH, Feng JF, Nai MY, He YG (2007) Hopf bifurcation analysis for a twoneuron network with four delays. Chaos Soltions Fractals 34:795–812
Zheng BD, Zhang YH, Zhang CR (2008) Global existence of periodic solutions on a simplified BAM neural network model with delays. Chaos Soltions Fractals 37:1397–1408
Gopalsamy K, He XZ (1994) Delay-independent stability in bi-directional associative memory networks. IEEE Trans Neural Netw 5:998–1002
Ncube I (2013) Stability switching and Hopf bifurcation in a multiple-delayed neural network with distributed delay. J Math Anal Appl 407:141–146
Gupta PD, Majee NC, Roy AB (2008) Asymptotic stability, orbits stability of Hopf bifurcation periodic solution of a simple three-neuron artificial neural network with distributed delay. Nonlinear Anal Model Control 13:9–30
Ruan SG, Wei JJ (2003) On the zero of some transcendential functions with applications to stability of delay differential equations with two delays. Dyn Contin Discr Impuls Syst Ser A 10:863–874
Cooke KL, Grossman Z (1982) Discrete delay, distributed delay and stability switches. J. Math. Anal. Appl. 86:592–627
Hassard BD, Kazarino ND, Wan YH (1981) Theory and applications of Hopf bifurcation. Cambridge University Press, Cambridge
Liao XF, Wu ZF, Yu JB (1999) Stability switches and bifurcation analysis of a neural networks with continuous delay. IEEE Trans. Syt. Man cyber. Part A: Syst. Humans 29:692–696
Liao XF, Liu Q, Zhang W (2006) Delay-dependent asymptotic stability for neural networks with distributed delays. Nonlinear Anal.: Real World Appl 7:1178–1192
Liao XF, Li SW, Chen GR (2004) Bifurcation analysis on a two-neuron system with distributed delays in the frequency domain. Neural Netw. 17:545–561
Acknowledgments
This work is supported by National Natural Science Foundation of China (No. 11261010, No. 11201138 and No. 11101126), Natural Science and Technology Foundation of Guizhou Province (J[2015]2025) and Scientific Research Fund of Hunan Provincial Education Department (No. 12B034).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Xu, C., Zhang, Q. & Wu, Y. Bifurcation Analysis in a Three-Neuron Artificial Neural Network Model with Distributed Delays. Neural Process Lett 44, 343–373 (2016). https://doi.org/10.1007/s11063-015-9461-2
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11063-015-9461-2