
Abstract
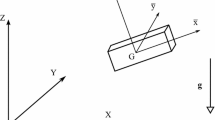
In this paper a method to adopt the principal axes of a deformable body as its body-attached frame is presented. The deformable body in a multibody setting is allowed to deform while it undergoes rigid-body motion. The fundamental concepts of imposing the principal axes as a moving reference frame are that the origin of the frame must remain at the instantaneous mass center and that the three products of inertia must remain zero as the body deforms. These conditions require the construction of several auxiliary matrices that are used in the constraint equations at the position, velocity, and acceleration levels. These auxiliary matrices are constructed only once and remain unchanged through the motion of the deformable body. The presented formulation does not depend on the type of finite element and multibody formulations or any associated assumptions.
Article PDF
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
De Veubeke, B.F., ‘The dynamics of flexible bodies’, International Journal Engineering Science 14, 1976, 895–913.
Agrawal, O.P. and Shabana, A.A., ‘Application of deformable-body mean axis to flexible multibody system dynamics’, Computer methods in Applied Mechanics and Engineering 56, 1986, 217–245.
Canavin, J.R. and Likins, P.W., ‘Floating reference frames for flexible spacecraft’, J. Spacecraft 14(12), 1977, 724–732.
Gere, J.M., Mechanics of Materials, 5th ed. Brooks/Cole, 2000.
Nikravesh, P.E. and Lin, Y., ‘Body Reference Frames in Deformable Multibody Systems’, International Journal of Multiscale Computational Engineering 1(2/3), 2003, 201–217 (Begell House, Inc., 145 Madison Avenue, New York, NY 10016).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Nikravesh, P.E., Lin, Ys. Use of Principal Axes as the Floating Reference Frame for a Moving Deformable Body. Multibody Syst Dyn 13, 211–231 (2005). https://doi.org/10.1007/s11044-005-2514-y
Received:
Accepted:
Issue Date:
DOI: https://doi.org/10.1007/s11044-005-2514-y