
Abstract
The effects of TSDT on the thermal vibration of thick FGM spherical shells are investigated by using the GDQ numerical method. The c1 term of nonlinear coefficient in TSDT displacement is included to obtain the dynamic GDQ discrete equations. Parametric variables for environment temperature, FGM power law index and calculated shear coefficient are used to study the main effects on the stress and center deflection. The calculated thermal deflection and stress data of time response and transient response are presented for the thick FGM spherical shells.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Analytical and numerical studies in many kinds of spherical shells have been already presented. Venås and Jenserud (2019) presented the exact results of acoustic scattering by using the separation of variables for the spherical symmetric scatters with fluid and solid layers. Kareem and Majeed (2019) presented the transient response results by using the higher order shear deformation theory for the laminated shallow spherical shell subjected to low-velocity impact. Huang et al. (2019) presented the numerical fluid–structure interaction vibration results by using the wave superposition method for the elastic spherical shells. Sayyad and Ghugal (2019) presented the free vibration results for the laminated spherical shells by using a generalized higher-order shell theory. Stampouloglou and Theotokoglou (2018) presented the elastic-static results for the inhomogeneous equal thickness spherical shells by using an exact analytical method. Duc et al. (2017) presented the numerical nonlinear dynamic and vibration results by using the classical shell theory and Pasternak's two parameters elastic foundations (EF) for the Sigmoid power law distribution functionally graded material (S-FGM) shallow spherical shells. Sahan (2016) presented the numerical dynamic response results for the viscoelastic cross-ply laminated shallow spherical shells. Fu and Hu (2013) presented the numerical nonlinear transient response results by using the higher order shear deformation theory for the fibre metal laminated (FML) shallow spherical shells under one-dimensional unsteady temperature fields. Sepiani et al. (2010) presented the numerical free vibration and buckling results by using the first-order shear deformation theory (FSDT) formulation for the functionally graded material (FGM) shells without considering the thermal effect. The motivation of the paper is to obtain the calculated thermal deflection and stress data of time response and transient response for the thick FGM spherical shells by considering the nonlinear TSDT and the fully homogeneous equation.
The author has presented some papers of thermal vibration for the generalized differential quadrature (GDQ) numerical method applied in the composited FGM shells. Hong (2016) presented the thermal vibration of Terfenol-D and FGM circular cylindrical shells mainly by using FSDT model. Hong (2014) presented the thermal vibration of Terfenol-D and FGM cylindrical shells mainly by using varied shear coefficient. It is interesting to investigate the GDQ solution of thermal stresses and center displacement mainly by considering the effects of third-order shear deformation theory (TSDT) and vibration frequency of fully homogeneous equation on the thermal vibration of thick FGM spherical shells under four edges simply support. Parametric variables of environment temperature, FGM power law index and calculated shear coefficient are used to study the main affects on the stress and center deflection for the thick FGM spherical shells.
2 Procedures of formulation
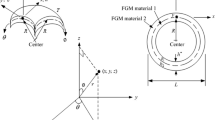
For a two-material e.g. stainless steel and silicon nitride FGM spherical shell under temperature difference \(\Delta T\) is shown in Fig. 1 with thickness h1 of inner constituent layer FGM material 1 and thickness h2 of outer constituent layer FGM material 2, L is the axial length of FGM spherical shells, h* is the total thickness of FGM spherical shells. A point in the coordinates \(\left( {r, \theta , \emptyset } \right)\) of spherical axes can be corresponded to the coordinates \(\left( {x, y, z} \right)\) of the Cartesian axes, in which r is the radius of FGM shells with x = r sin\(\emptyset\) cos\(\theta\) and y = r sin\(\emptyset\) sin\(\theta\). The angle \(\theta\) denotes in the circumferential direction of the shells. The angle \(\emptyset\) denotes in the direction of z axis and the direction of radius in the spherical shells. The properties Pi of individual constituent material of FGM spherical shells are in functions of environment temperature T and temperature coefficients \(P_{0} ,P_{ - 1} ,P_{1} ,P_{2}\) and P3 (Hong 2016). The material of power-law function of FGM spherical shells are assumed by Young’s modulus Efgm of FGM represented in standard variation form of power law index Rn, the other properties e.g. Poisson’s ratios are simply assumed in the average form (Hong 2014).

Two-material thick FGM spherical shell under \(\Delta T\)
The nonlinear displacements u, v and w in time dependent of thick FGM spherical shells are assumed in the nonlinear coefficient c1 term of TSDT equations (Lee et al. 2004) as follows,
where u0 and v0 are tangential displacements in the in-surface coordinates x and \(\theta\) axes direction, respectively. w is transverse displacement in the out of surface coordinates z axis thickness direction of the middle-plane of shells. \(\phi_{x}\) and \(\phi_{\theta }\) are the shear rotations. R is the middle-surface radius of FGM spherical shells. t is time. Coefficient of \(c_{1} = 4/\left[ {3(h^{*} )^{2} } \right]\) is assumed in TSDT approach.
For the normal stresses (\(\sigma_{x}\) and \(\sigma_{\theta }\)) and the shear stresses (\(\sigma_{x\theta }\), \(\sigma_{\theta z}\) and\(\sigma_{xz}\)) in the thick FGM spherical shells under \(\Delta T\) for the subscript kth constituent layer are assumed in terms of the stiffness \(\overline{Q}_{ij}\), in-plane strains \(\varepsilon_{x}\), \(\varepsilon_{\theta }\) and \(\varepsilon_{x\theta }\), not negligible shear strains \(\varepsilon_{\theta z}\) and \(\varepsilon_{xz}\) as follows (Lee and Reddy 2005; Whitney 1987),
where \(\alpha_{x}\) and \(\alpha_{\theta }\) are the coefficients of thermal expansion, \(\alpha_{x\theta }\) is the coefficient of thermal shear in the in-surface coordinates x and \(\theta\) axes direction, respectively.
Simply, the heat conduction equation for the FGM shell in the spherical coordinates is assumed as follows (Hong 2016),
where \(K = \kappa_{fgm} /\left( {\rho_{fgm} C_{vfgm} } \right)\), in which \(\kappa_{fgm}\) is thermal conductivity of FGM spherical shells, ρfgm is density of FGM spherical shells, \(C_{vfgm}\) is specific heat of FGM spherical shells. \(\Delta T = T_{0} \left( {x,\theta ,t} \right) + \frac{z}{{h^{*} }}T_{1} \left( {x,\theta ,t} \right)\) is the temperature difference between the FGM spherical shells and curing area, it is assumed in linear with variable z, in which T0 and T1 are temperature parameters in functions of coordinates x, \(\theta\) and t. The frequency of heat flux for the thermal loads on the spherical FGM shells would be given from the Eq. (3) with the simplified sinusoidal temperature loading \(\Delta T = \frac{z}{{h^{*} }}\overline{T}_{1} \sin \left( {\pi x/L} \right)\sin \left( {\pi \theta } \right)\sin \left( {\gamma t} \right)\) and\(z = R\cos \emptyset\), in which \(\gamma\) is the frequency of heat flux, \(\overline{T}_{1}\) is the amplitude of temperature, thus the frequency of heat flux equation is obtained as follows by applying the heat conduction equation in the cylindrical shells (Hong 2016),
The novelty presented in the paper is to assume the dynamic equations of motion with TSDT in the FGM cylindrical shells can be applied further into the FGM spherical shells for a small element on a given \(\theta\) angle. The dynamic equations of motion with TSDT for a small element on a given ∅ angle in the FGM spherical shells are assumed as follows (Sayyad and Ghugal 2019; Reddy 2002),
where \(\overline{M}_{\alpha \beta } = M_{\alpha \beta } - c_{1} P_{\alpha \beta }\), \(\overline{Q}_{\alpha } = Q_{\alpha } - 3c_{1} R_{\alpha }\), \(\alpha ,\beta = x,\theta\). q is the external pressure load.
in which N* is total number of constituent layers, \(\rho^{\left( k \right)}\) is the density of kth constituent ply.\(J_{i} = I_{i} - c_{1} I_{i + 2}\), (i = 1,4), \(K_{2} = I_{2} - 2c_{1} I_{4} + c_{1}^{2} I_{6}\).
The Von Karman type of strain–displacement relations with \(\frac{{\partial v_{0} }}{\partial z} = \frac{{ - v_{0} }}{R\sin \emptyset }\), \(\frac{{\partial u_{0} }}{\partial z} = \frac{{ - u_{0} }}{R\sin \emptyset }\) are assumed in the spherical shell and \(\frac{\partial w}{{\partial z}} = \frac{{\partial \phi_{x} }}{\partial z} = \frac{{\partial \phi_{\theta } }}{\partial z} = 0\) are used as follows,
After substituting Eqs. (2) and (6) into Eq. (5), the dynamic equilibrium differential equations with nonlinear TSDT of FGM spherical shells can be derived in matrix forms and similar to the published paper contained the following stiffness coefficients in the 5 by 5 matrix (Hong 2019),
in which \(k_{\alpha }\) is the shear coefficient. The \(\overline{Q}_{{i^{s} j^{s} }}\) and \(\overline{Q}_{{i^{*} j^{*} }}\) for thick FGM spherical shells containing with not neglect terms \(z/(R\sin \emptyset )\) can be assumed in the simple forms as follows,
in which \(\nu_{fgm} = \left( {\nu_{1} + \nu_{2} } \right)/2\) is the Poisson’s ratios of the FGM spherical shells simply expressed in average form, \(E_{fgm} = (E_{2} - E_{1} )\left( {\frac{{z + h^{*} /2}}{{h^{*} }}} \right)^{{R_{n} }} + E_{1}\) is the Young’s modulus of the FGM spherical shells expressed in standard form of power-law function, E1 and E2 are the Young’s modulus, \(\nu_{1}\) and \(\nu_{2}\) are the Poisson’s ratios of the two-material constituent FGM, respectively.
The time sinusoidal displacement and shear rotations of thermal vibrations in a typical nonlinear time response analysis, they can be assumed and used as follows (Hong 2016),
in which \(\omega_{mn}\) is the natural frequency in two directional mode shape subscript numbers m and n of the shells. Also the simple vibration of sinusoidal temperature parameter for the thermal loads are assumed as follows for the GDQ computation,
3 Some numerical results and discussions
The GDQ method is presented by Shu and Richards in 1990 (Bert et al. 1989; Shu and Du 1997). The boundary conditions in dynamic GDQ discrete equations approach can be considered for four sides simply supported, not symmetric, orthotropic of laminated thick FGM spherical shells. Thus the dynamic GDQ discrete equations can be rewritten into the following matrix form for a given typical grid point (i, j),
where {B} is a N**th order row external loads vector. [A] is a dimension of N** by N** coefficient matrix with \(N^{**} = \left( {N - 2} \right) \times \left( {M - 2} \right) \times 5\) containing the stiffness coefficients and GDQ weighting parameters. And {W*} is a N**th order unknown column vector to be found and can be expressed as \(\{ W^{*} \} = \{ U_{2,2} , \ldots , U_{2,M - 1} ,U_{3,2} , \ldots , U_{3,M - 1} , \ldots ,U_{N - 1,2} , \ldots , U_{N - 1,M - 1}\), \(V_{2,2} , \ldots , V_{2,M - 1} ,V_{3,2} , \ldots , V_{3,M - 1} , \ldots ,V_{N - 1,2} , \ldots , V_{N - 1,M - 1}\), \(W_{2,2} , \ldots , W_{2,M - 1} ,W_{3,2} , \ldots , W_{3,M - 1} , \ldots ,W_{N - 1,2} , \ldots , W_{N - 1,M - 1}\), \(\phi_{x2,2} ,\phi_{x2,3} \ldots,\phi_{x2,M - 1} ,\phi_{x3,2} ,\phi_{x3,3} ,\ldots,\phi_{x3,M - 1} ,\ldots,\phi_{xN - 1,2} ,\phi_{xN - 1,3} ,\ldots,\phi_{xN - 1,M - 1}\), \(\phi_{\theta 2,2} ,\phi_{\theta 2,3} ,\ldots,\phi_{\theta 2,M - 1} ,\phi_{\theta 3,2} ,\phi_{\theta 3,3} ,\ldots,\phi_{\theta 3,M - 1} ,\ldots,\phi_{\theta N - 1,2} ,\phi_{\theta N - 1,3} ,\ldots,\phi_{\theta N - 1,M - 1} \}^{t}\), in which the subscript numbers are represented as the corresponding interior grid point for the non-dimensional unknown variables \(U = u_{0} /L\), \(V = v_{0} /R\), \(W = w/h^{*}\), \(\phi_{x}\) and \(\phi_{\theta }\).
For the constituent layers of spherical FGM shells are in the same stacking, without in-plane forces and external pressure \((q = 0)\). The coordinates xi and \(\theta_{j}\) for the grid points numbers N and M of thick FGM shells are used as follows,
Also the computed values of inter-laminar stresses \(\sigma_{x}\), \(\sigma_{\theta }\), \(\sigma_{x\theta }\), \(\sigma_{\theta z}\) and \(\sigma_{xz}\) in the kth constituent layer can be obtained after the values of non-dimensional variables U, V, W, \(\phi_{x}\) and \(\phi_{\theta }\) are found. Before the process of thermal vibrations of spherical FGM shell, it is needed to obtain the calculation values of frequency \(\omega_{mn}\), in which two directional subscript m is the number of axial half-waves, n is the number of circumferential waves. It is reasonable to assumed that u0, v0, w, \(\phi_{x}\) and \(\phi_{\theta}\) are expressed in the time sinusoidal form of free vibration for spherical FGM shell under four sides simply supported (Hong 2016). After substituting sinusoidal displacement equations into dynamic equilibrium differential equations and including the nonlinear effects of c1 terms in the elements of homogeneous matrix, thus the fully homogeneous equation can be obtained and contained with \(\lambda_{mn} = I_{0}\omega_{mn}^{2}\). The zero value of determinant for the coefficient matrix in fully equation, the polynomial equation in fifth-order of \(\lambda_{mn}\) can be obtained, thus the \(\omega_{mn}\) can be computed.
The transverse shear locking issue did not occur in the GDQ numerical method. It is very interesting to study the thick nonlinear TSDT FGM spherical shells with L/R = 1, h* = 1.2 mm, h1 = h2 = 0.6 mm, m = n = 1 and q = 0. The FGM material 1 is SUS304 (stainless steel) at inner position, the FGM material 2 is Si3N4 (silicon nitride) at outer position used for the numerical GDQ computations. Firstly, the dynamic convergence study of center deflection amplitude w(L/2, 2π/2) (unit mm) in the thermal vibration of nonlinear TSDT is obtained. The investigation cases are under the values of c1 = 0.925925 and c1 = 0 for thick L/h* = 10 with \(\gamma\) = 0.2618004/s and for L/h* = 5 with \(\gamma\) = 0.261802/s, respectively. The GDQ convergence results of deflection versus grid points number at t = 6 s, T = 100 K, \(\bar{T}_{1}\) = 100 K calculated on \(\emptyset = 10^{\circ}, 45^{\circ}\) and 90° are presented in Tables 1, 2, 3. In the nonlinear L/h* = 5 case of c1 = 0.925925/mm2: (a) for value of Rn = 0.5, \(k_{\alpha}\) = 0.111874 and \(\omega_{11}\) = 0.003031/s, 0.000554/s and 0.000241/s respectively on \(\emptyset = 10^{\circ}, 45^{\circ}\) and 90° are obtained. (b) for value of Rn = 1, \(k_{\alpha}\) = 0.149001 and \(\omega_{11}\) = 0.002490/s, 0.002063/s and 0.000238/s respectively on \(\emptyset = 10^{\circ}, 45^{\circ}\) and 90° are obtained. (c) for value of Rn = 2, \(k_{\alpha}\) = 0.231364 and \(\omega_{11}\) = 0.001923/s, 0.002056/s and 0.000230/s respectively on \(\emptyset = 10^{\circ}, 45^{\circ}\) and 90° are obtained. In the linear L/h* = 5 case of c1 = 0/mm2: (d) for value of Rn = 0.5, \(k_{\alpha}\) = 0.111874 and \(\omega_{11}\) = 0.011064/s, 0.003546/s and 0.001583/s respectively on \(\emptyset = 10^{\circ}, 45^{\circ}\) and 90° are obtained. (e) for value of Rn = 1, \(k_{\alpha}\) = 0.149001 and \(\omega_{11}\) = 0.040200/s, 0.002699/s and 0.001335/s respectively on \(\emptyset = 10^{\circ}, 45^{\circ}\) and 90° are obtained. (f) for value of Rn = 2, \(k_{\alpha}\) = 0.231364 and \(\omega_{11}\) = 0.029226/s, 0.001404/s and 0.000490/s respectively on \(\emptyset = 10^{\circ}, 45^{\circ}\) and 90° are obtained. The error accuracy of convergence study for the \(w(L/2, 2\pi/2)\) is 1.6e−05 on \(\emptyset = 45^{\circ}\), Rn = 1 and L/h* = 10 case. Thus grid points \(N{\times} M\) = 13 × 13 can be accepted in very good convergence condition, and used well in the GDQ computations of nonlinear TSDT time responses and stresses.
Secondly, the values of \(w(L/2, 2\pi/2)\) (unit mm) for the thermal vibration of nonlinear TSDT are calculated. The \(\gamma\) values are decreasing from \(\gamma\) = 15.707966/s at t = 0.1 s to \(\gamma\) = 0.523602/s at t = 3.0 s used for L/h* = 5, from \(\gamma\) = 15.707964/s at t = 0.1 s to \(\gamma\) = 0.523599/s at t = 3.0 s used for L/h* = 10 when \(\gamma\). Figure 2 shows the response values of \(w(L/2, 2\pi/2)\) (unit mm) versus time t of nonlinear TSDT and linear under the values of c1 = 0.925925/mm2 and c1 = 0 in FGM spherical shells on \(\emptyset = 10^{\circ}\) for thick L/h* = 5 and 10, respectively, \(R_{n}=1\), \(k_{\alpha}\) = 0.120708, T = 600 K, \(\bar{T}_{1}\) = 100 K and t = 0.1–3.0 s with time step is 0.1 s. The maximum value of \(w(L/2, 2\pi/2)\) is − 14.930645 mm occurs at t = 0.5 s for thick L/h* = 5 with c1 = 0.925925/mm2 and \(\gamma\) = 3.141596/s. The maximum value of \(w(L/2, 2\pi/2)\) is 16.736791 mm occurs at t = 0.5 s for thick L/h* = 10 with c1 = 0/mm2 and almost same frequency of applied heat flux \(\gamma\) = 3.141593/s. The values of \(w(L/2, 2\pi/2)\) are underestimated with time in the case c1 = 0/mm2 for L/h* = 5. But they are overestimated with time in the case c1 = 0/mm2 for L/h* = 10 when \(\emptyset = 10^{\circ}\).

\(w(L/2, 2\pi/2)\) versus t on \(\emptyset = 10^{\circ}\)
Figure 3 shows the response values of \(w(L/2, 2\pi/2)\) (unit mm) versus time t of nonlinear TSDT and linear under the values of c1 = 0.925925/mm2 and c1 = 0 in FGM spherical shells on \(\emptyset = 10^{\circ}\) for thick L/h* = 5 and 10, respectively, \(R_{n}=1\), \(k_{\alpha}\) = 0.120708, T = 600 K, \(\bar{T}_{1}\) = 100 K and t = 0.1–3.0 s with time step is 0.1 s. The maximum value of \(w(L/2, 2\pi/2)\) is 5.043568 mm occurs at t = 0.1 s for thick L/h* = 5 with c1 = 0.925925/mm2 and higher frequency of applied heat flux \(\gamma\) = 15.707964/s. The maximum value of \(w(L/2, 2\pi/2)\) is 722.487366 mm occurs at t = 0.1 s for thick L/h* = 10 with c1 = 0/mm2 and higher frequency of applied heat flux \(\gamma\) = 15.707963/s. The values of \(w(L/2, 2\pi/2)\) are underestimated with time in the case c1 = 0/mm2 for L/h* = 5. Also they are overestimated with time in the case c1 = 0/mm2 for L/h* = 10 when \(\emptyset = 45^{\circ}\). The values of \(w(L/2, 2\pi/2)\) are converging with time in the cases c1 = 0.925925/mm2 and c1 = 0/mm2 for thick L/h* = 5 and 10 respectively, except that a small jump near around t = 1.2 s and L/h* = 5 when \(\emptyset = 45^{\circ}\).

\(w(L/2, 2\pi/2)\) versus t on \(\emptyset = 45^{\circ}\)
Figure 4 shows the response values of \(w(L/2, 2\pi/2)\) (unit mm) versus time t of nonlinear TSDT and linear under the values of c1 = 0.925925/mm2 and c1 = 0 in FGM spherical shells on \({{\emptyset }=90}^{^\circ }\) for thick L/h* = 5 and 10, respectively, \(R_{n=1}\), \(k_{\alpha}\) = 0.120708, T = 600 K, \(\bar{T}_{1}\) = 100 K and t = 0.1–3.0 s with time step is 0.1 s. The maximum value of \(w(L/2, 2\pi/2)\) is − 33.955257 mm occurs at t = 0.1 s for thick L/h* = 5 with c1 = 0.925925/mm2 and higher frequency of \(\gamma\) = 15.707964/s. The maximum value of \(w(L/2, 2\pi/2)\) is 1837.97571 mm occurs at t = 0.1 s for thick L/h* = 10 with c1 = 0/mm2 and higher frequency of \(\gamma\) = 15.707963/s. The values of \(w(L/2, 2\pi/2)\) are underestimated with time in the case c1 = 0/mm2 for L/h* = 5. But they are overestimated with time in the case c1 = 0/mm2 for L/h* = 10 when \({\emptyset}=45^{^\circ }\). The values of \(w(L/2, 2\pi/2)\) are converging with time in the cases c1 = 0.925925/mm2 and c1 = 0/mm2 for thick L/h* = 5 and L/h* = 10 when \({\emptyset}=45^{^\circ }\), respectively. The values of \(w(L/2, 2\pi/2)\) of thick FGM spherical shells need to be modified and reduced to smaller values by using the nonlinear coefficient c1 term of displacement field of TSDT e.g. with c1 = 0.925925/mm2.

\(w(L/2, 2\pi/2)\) versus t on \({\emptyset}=90^{^\circ }\)
The advantages of TSDT (with c1 = 0.925925/mm2) compared to the FSDT (with c1 = 0/mm2) in the Figs. 2, 3, 4 and Tables 1, 2, 3 can be explained in more detail as follows. The time response values of center deflection are underestimated in the linear FSDT case c1 = 0/mm2 for more thick L/h* = 5, but they are overestimated in the linear FSDT case c1 = 0/mm2 for less thick L/h* = 10, respectively when comparison with the data of nonlinear TSDT case c1 = 0.925925/mm2 when \({\emptyset}=10^{^\circ }\). It can be shown that the advantage of TSDT model is to provide the more accurate data in the studies of thick FGM spherical shells.
Figure 5a shows the \({\sigma }_{x}\) (unit GPa) versus z/h* and Fig. 5b shows the \({\sigma }_{x\theta }\) (unit GPa) versus z/h* at center position (x = L/2, \(w(L/2, 2\pi/2)\)) of FGM spherical shells on \({\emptyset}=45^{^\circ }\), respectively at t = 3.0 s for thick a/h* = 10 with c1 = 0.925925/mm2 and Rn = 1. The value (1.7311E-03 GPa) of \({\sigma }_{x}\) at z = − 0.5h* is found in the greater value than the value (2.6456E-04 GPa) of \({\sigma }_{x\theta }\) at z = 0.5h*, thus the normal stress \({\sigma }_{x}\) can be treated as the dominated stress. Figure 5c, d shows the time responses of the dominated stresses \({\sigma }_{x}\) (unit GPa) at center position of inner surface z = − 0.5h* as the analyses of deflection case of FGM spherical shells on \({\emptyset}=45^{^\circ }\) in Fig. 3 for Rn = 1, thick L/h* = 5 and 10 with c1 = 0.925925/mm2, respectively. The maximum value of stresses \({\sigma }_{x}\) is 1.9684E-03 GPa occurs at t = 0.1 s in the periods t = 0.1–3 s for thick L/h* = 5. The values of dominated stresses \({\sigma }_{x}\) are all decreasing with time in the case c1 = 0.925925/mm2 for thick L/h* = 5 and 10 of FGM spherical shells when \({\emptyset}=45^{^\circ }\), respectively.

Stresses versus z/h* and t on \({\emptyset}=45^{^\circ }\)
Figure 6 shows the response values of \(w(L/2, 2\pi/2)\) (unit mm) versus T (100 K, 600 K and 1000 K) and Rn = 0.1–10 of nonlinear TSDT under the values of c1 = 0.925925/mm2 for thick L/h* = 5 and 10 of FGM spherical shells when \(\emptyset = 10^{\circ}\), 45° and 90°, respectively with the vibration frequency approach of fully homogeneous equation in \({\bar{T}}_{1}\)=100 K, \(\gamma\) values of applied heat flux, calculated and varied values of \(k_{\alpha}\) at t = 0.1 s. Figure 6a shows the curves of \(w(L/2, 2\pi/2)\) versus T and Rn for the L/h* = 5 on \({{\emptyset }=10}^{^\circ }\) case, the maximum value of \(w(L/2, 2\pi/2)\) is 129.502029 mm occurs at T = 600 K for Rn = 0.5. The \(w(L/2, 2\pi/2)\) values are all increasing versus T from T = 100 K to T = 600 K then decreasing versus T from T = 600 K to T = 1000 K for Rn = 0.5. The amplitude \(w(L/2, 2\pi/2)\) of the L/h* = 5 can withstand for higher environment temperature (T = 1000 K) for Rn = 0.5 on \({{\emptyset }=10}^{^\circ }\). Figure 6b shows the curves of \(w(L/2, 2\pi/2)\) versus T and Rn for the L/h* = 10 on \({{\emptyset }=10}^{^\circ }\) case, the maximum value of \(w(L/2, 2\pi/2)\) is 74.199798 mm occurs at T = 1000 K for Rn = 0.2. The \(w(L/2, 2\pi/2)\) values are all decreasing versus T from T = 600 K to T = 1000 K for Rn = 2. The amplitude \(w(L/2, 2\pi/2)\) of the L/h* = 10 can withstand for higher environment temperature (T = 1000 K) for Rn = 2 on \({{\emptyset }=10}^{^\circ }\). Figure 6c shows the curves of \(w(L/2, 2\pi/2)\) versus T and Rn for the L/h* = 5 on \({\emptyset}=45^{^\circ }\) case, the maximum value of \(w(L/2, 2\pi/2)\) is 10801.9971 mm occurs at T = 100 K for Rn = 0.5. The \(w(L/2, 2\pi/2)\) values are all increasing versus T from T = 600 K to T = 1000 K for values of Rn = 0.5, 1 and 2. The \(w(L/2, 2\pi/2)\) values are almost constant versus T from T = 600 K to T = 1000 K for values of Rn = 0.1, 0.2, 5 and 10. The amplitude \(w(L/2, 2\pi/2)\) of the L/h* = 5 cannot withstand for higher environment temperature (T = 1000 K) on \({\emptyset}=45^{^\circ }\). Figure 6d shows the curves of \(w(L/2, 2\pi/2)\) versus T and Rn for the L/h* = 10 on \({\emptyset}=45^{^\circ }\) case, the maximum value of \(w(L/2, 2\pi/2)\) is 2.440104 mm occurs at T = 1000 K for value of Rn = 0.1. The \(w(L/2, 2\pi/2)\) values are all increasing versus T for all value of Rn, the \(w(L/2, 2\pi/2)\) values of the L/h* = 10 also cannot withstand for higher environment temperature (T = 1000 K) at t = 0.1 s of FGM spherical shells when \({\emptyset}=45^{^\circ }\). Figure 6e shows the curves of \(w(L/2, 2\pi/2)\) versus T and Rn for the L/h* = 5 on \({\emptyset}=90^{^\circ }\) case, the maximum value of \(w(L/2, 2\pi/2)\) is − 50.971008 mm occurs at T = 1000 K for Rn = 2. The \(w(L/2, 2\pi/2)\) values are all increasing versus T from T = 600 K to T = 1000 K for value of Rn except that Rn = 5. The amplitude \(w(L/2, 2\pi/2)\) of the L/h* = 5 cannot withstand for higher environment temperature (T = 1000 K) except that Rn = 5 on \({\emptyset}=90^{^\circ }\). Figure 6f shows the curves of \(w(L/2, 2\pi/2)\) versus T and Rn for the L/h* = 10 on \({\emptyset}=90^{^\circ }\) case, the maximum value of \(w(L/2, 2\pi/2)\) is 7.039263 mm occurs at T = 1000 K for Rn = 0.1. The \(w(L/2, 2\pi/2)\) values are all increasing versus T from T = 600 K to T = 1000 K for all value of Rn. The amplitude \(w(L/2, 2\pi/2)\) of the L/h* = 10 cannot withstand for higher environment temperature (T = 1000 K) on \({\emptyset}=90^{\circ}\).

\(w(L/2, 2\pi/2)\) versus T and Rn for L/h* = 5 and 10 when \(\emptyset = 10^{\circ}\), 45° and 90°
Figure 7 shows the \({\sigma }_{x}\) (unit GPa) at center position of inner surface z = − 0.5h* versus T and all different values Rn for the thermal vibration of nonlinear TSDT of FGM spherical shells when \(\emptyset = 45^{\circ}\), thick L/h* = 5 and 10 as the analyses of deflection case in Fig. 6. Figure 7a shows the curves of \({\sigma }_{x}\) versus T and Rn for the L/h* = 5, the values of \({\sigma }_{x}\) versus T are all increasing (from T = 100 K to T = 600 K) and then all decreasing (from T = 600 K to T = 1000 K) for value of Rn except that Rn = 0.5, 1 and 2. The maximum value of \({\sigma }_{x}\) is − 0.116254GPa occurs at T = 100 K for Rn = 0.5. The dominated stress \({\sigma }_{x}\) of the L/h* = 5 can withstand for higher environment temperature (T = 1000 K) for value of Rn except that Rn = 0.5. Figure 7b shows the curves of \({\sigma }_{x}\) versus T and Rn for the L/h* = 10 case, the values of \({\sigma }_{x}\) versus T are all increasing (from T = 100 K to T = 600 K) and then all decreasing (from T = 600 K to T = 1000 K) for all value of Rn. The maximum value of \({\sigma }_{x}\) is 0.001954GPa occurs at T = 600 K, for Rn = 10. The dominated stress \({\sigma }_{x}\) of the L/h* = 10 for all value of Rn can withstand for higher environment temperature (T = 1000 K) at t = 0.1 s of FGM spherical shells when \(\emptyset = 45^{\circ}\).

\({\sigma }_{x}\) versus T on \(\emptyset = 45^{\circ}\)
Finally, the transient responses of \(w(L/2, 2\pi/2)\) (unit mm) are presented with \(c_{1}\) = 0.925925/mm2 for the thermal vibration of nonlinear TSDT of FGM spherical shells when \(\emptyset = 45^{\circ}\). Figure 8a shows the transient values of \(w(L/2, 2\pi/2)\) in the thermal vibration of nonlinear TSDT FGM spherical shells for thick L/h* = 5 with fixed \(\omega_{11}\) = 0.005154/s and L/h* = 10 with fixed \(\omega_{11}\) = 0.000220/s, respectively. Also used the fixed value \(\gamma\) = 296880.5/s of applied heat flux to calculate the transient response of super high frequency, \(R_{n} = 1\), \(k_{\alpha}\) = 0.120708, T = 600 K, \(\bar{T}_{1}\) = 100 K for t = 0.01–0.2 s and time step is 0.001 s. The maximum value of \(w(L/2, 2\pi/2)\) is 4543.42627 mm occurs at t = 0.011 s for thick L/h* = 10. Figure 8b shows the enlargements of the transient response \(w(L/2, 2\pi/2)\) for thick L/h* = 5 and 10, during t = 0.01–0.03 s and time step is 0.001 s. The amplitude value of \(w(L/2, 2\pi/2)\) of the thermal nonlinear TSDT thick FGM spherical shells at t = 0.011 s is 4543.42627 mm for L/h* = 10 and is greater than that − 409.009521 mm for L/h* = 5. It is very interesting to make the comparison with published work and verify the present work. There was a published similarly work by Mao et al. (2011) that is shown in the reprint Fig. 8c for transient responses of deflection in the FGM shallow spherical shell. The responses of deflections are oscillating and decreasing with time under temperature difference. Figure 8d shows the comparisons of the transient response \(w(L/2, 2\pi/2)\) for thick L/h* = 10, during t = 0.05–0.2 s and time step is 0.001 s with low \(\gamma\) = 785.3982/s, \(\omega_{11}\) = 0.001497/s and super high \(\gamma\) = 296880.5/s, \(\omega_{11}\) = 0.000220/s, respectively. The more high frequency of applied heat flux gets more high amplitude of deflection. The transient values of center deflection amplitudes versus \(\gamma\) are all decreasing for thick L/h* = 10.

Transient responses of \(w(L/2, 2\pi/2)\) and comparison for L/h* = 5 and 10 on \(\emptyset = 45^{\circ}\)
4 Conclusions
The GDQ numerical solutions are obtained for the deflections and stresses in the thermal vibration of thick FGM spherical shells by considering the nonlinear coefficient c1 term of TSDT. The values of center deflection amplitudes are underestimated with time in the linear case c1 = 0/mm2 for L/h* = 5, but they are overestimated with time in the linear case c1 = 0/mm2 for L/h* = 10, respectively by comparison with the data of nonlinear case c1 = 0.925925/mm2 when \(\emptyset = 10^{\circ}\). The values of dominated stresses \(\sigma_{x}\) are all decreasing with time in the case c1 = 0.925925/mm2 for thick L/h* = 5 and 10, respectively. The amplitude \(w(L/2, 2\pi/2)\) on \(\emptyset = 10^{\circ}\) can withstand for higher temperature (T = 1000 K) of environment in the cases of L/h* = 5, Rn = 0.5 and L/h* = 10, Rn = 2. Also the dominated stress \(\sigma_{x}\) in the cases of L/h* = 5, Rn = 0.5 and L/h* = 10 for all value of Rn can withstand for higher temperature (T = 1000 K) of environment at t = 0.1 s.
References
Bert, C.W., Jang, S.K., Striz, A.G.: Nonlinear bending analysis of orthotropic rectangular plates by the method of differential quadrature. Comput. Mech. 5, 217–226 (1989)
Duc, N.D., Quang, V.D., Anh, V.T.T.: The nonlinear dynamic and vibration of the S-FGM shallow spherical shells resting on an elastic foundations including temperature effects. Int. J. Mech. Sci. 123, 54–63 (2017)
Fu, Y., Hu, S.: Nonlinear transient response of fibre metal laminated shallow spherical shells with interfacial damage under unsteady temperature fields. Compos. Struct. 106, 57–64 (2013)
Hong, C.C.: GDQ computation for thermal vibration of thick FGM plates by using fully homogeneous equation and TSDT. Thin-Walled Struct. 135, 78–88 (2019)
Hong, C.C.: Thermal vibration of magnetostrictive functionally graded material shells with the transverse shear deformation effects. Appl. Appl. Math. Int. J. 11, 127–151 (2016)
Hong, C.C.: Thermal vibration of magnetostrictive functionally graded material shells by considering the varied effects of shear correction coefficient. Int. J. Mech. Sci. 85, 20–29 (2014)
Huang, H., Zou, M.S., Jiang, L.W.: Study on the integrated calculation method of fluid–structure interaction vibration, acoustic radiation, and propagation from an elastic spherical shell in ocean acoustic environments. Ocean Eng. 177, 29–39 (2019)
Kareem, M.G., Majeed, W.I.: Transient dynamic analysis of laminated shallow spherical shell under low-velocity impact. J. Mater. Res. Technol. (2019). https://doi.org/10.1016/j.jmrt.2019.08.050
Lee, S.J., Reddy, J.N.: Non-linear response of laminated composite plates under thermomechanical loading. Int. J. Non-linear Mech. 40, 971–985 (2005)
Lee, S.J., Reddy, J.N., Rostam-Abadi, F.: Transient analysis of laminated composite plates with embedded smart-material layers. Finite Elem. Anal. Des. 40, 463–483 (2004)
Mao, Y.Q., Fu, Y.M., Chen, C.P., Li, Y.L.: Nonlinear dynamic response for functionally graded shallow spherical shell under low velocity impact in thermal environment. Appl. Math. Model. 35, 2887–2900 (2011)
Reddy, J.N.: Energy Principles and Variational Methods in Applied Mechanics. Wiley, New York (2002)
Sahan, M.F.: Dynamic analysis of linear viscoelastic cross-ply laminated shallow spherical shells. Compos. Struct. 149, 261–270 (2016)
Sayyad, A.S., Ghugal, Y.M.: Static and free vibration analysis of laminated composite and sandwich spherical shells using a generalized higher-order shell theory. Compos. Struct. 219, 129–146 (2019)
Sepiani, H.A., Rastgoo, A., Ebrahimi, F., Arani, A.G.: Vibration and buckling analysis of two-layered functionally graded cylindrical shell considering the effects of transverse shear and rotary inertia. Mater. Des. 31, 1063–1069 (2010)
Shu, C., Du, H.: Implementation of clamped and simply supported boundary conditions in the GDQ free vibration analyses of beams and plates. Int. J. Solids Struct. 34, 819–835 (1997)
Stampouloglou, I.H., Theotokoglou, E.E.: The radially inhomogeneous isotropic elastic equal thickness spherical shell. Compos. Part B 154, 374–381 (2018)
Venås, J.V., Jenserud, T.: Exact 3D scattering solutions for spherical symmetric scatterers. J. Sound Vib. 440, 439–479 (2019)
Whitney, J.M.: Structural analysis of laminated anisotropic plates. Technomic Publishinsg Company, Inc., Lancaster, Pennsylvania, USA (1987)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Hong, CC. Thermal vibration of thick FGM spherical shells by using TSDT. Int J Mech Mater Des 17, 367–380 (2021). https://doi.org/10.1007/s10999-021-09530-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10999-021-09530-4