
Abstract
A generalized non-local stress–strain gradient theory is presented using fractional calculus. The proposed theory includes as a special case: the classical theory; the non-local strain gradient theory; the Eringen non-local theory; the strain gradient theory; the general Eringen non-local theory; and the general strain gradient theory. This new formulation is therefore more comprehensive and more complete to model physical phenomena. Its application has been shown in free vibration, buckling and bending of simply supported (S–S) nano-beams. The non-linear governing equations have been solved by the Galerkin method. Furthermore the effects of different (additional) model parameters like: the length scale parameter; the non-local parameter; and different orders (integer and non-integer) of strain and stress gradients have been shown.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Many experimental results (Wong et al. 1997; Jing et al. 2006; Agrawal et al. 2008; Li et al. 2003; Sadeghian et al. 2009) and atomistic simulations (Zhu et al. 2006; Diao et al. 2006; Cao and Chen 2007; Olsson et al. 2007) have shown significant small-scale effects in nano-structures such as nano-rods, nano-beams and nano-plates. Forasmuch, as the theoretical continuum models are more cost effective than experimental and atomistic methods, therefore several non-classical continuum theories involving additional material length scale parameters have been developed.
Among these theories [the non-local elasticity theory (Eringen 1972, 1983), the strain gradient theory (Mindlin 1964, 1965; Lazopoulos 2009; Rahimi et al. 2018a), the non-local strain gradient theory (Lim et al. 2015), the consistent couple stress theory (Hadjesfandiari and Dargush 2015), the modified strain gradient theories (Liebold and Müller 2015)] the non-local strain gradient one, combines both of the classical non-local elasticity and the strain gradient theories and results in a higher-order non-local strain gradient theory. The non-local elasticity and the strain gradient theories are devoted to different aspects of materials and structures at small scale. The non-local elasticity theory does not include the non-locality of higher-order stresses while the strain gradient theory considers local higher-order strain gradients without non-local effects. Note that in the aforementioned theories, the integer gradients of stresses and strains exist, and therefore herein the important question is raised “what effect will result if the non-integer gradients are considered?”. This states the central point of this paper, namely to present that the non-integer gradients of stresses and strains make the modeling more flexible to mimic experimentally observed physical phenomena.
Fractional calculus is a branch of mathematical analysis, related to real or complex numbers, dealing with differential and integral operators of non-integer orders. Fractional derivatives have played a significant role in engineering in recent years (Ray et al. 2014; da Graça Marcos et al. 2008; Sapora et al. 2017; Faraji Oskouie et al. 2018; Yang 2012; Hilfer 2000). In many theoretical investigations, it has been extended to solid mechanics and has been shown that many physical systems can be represented more accurately using fractional operators. Challamel et al. (2013) introduced a general form of the Eringen non-local elasticity theory by using the Caputo fractional definition and also presented an optimized fractional derivative model. Moreover, they concluded that the model showed a perfect matching with the dispersive wave properties of the Born–Kármán model of lattice dynamics and was better than the Eringen non-local elasticity theory. Tarasov and Aifantis (2014) studied some fractional gradient elasticity models using the Caputo and the Riesz fractional derivatives definitions. Moreover, they proposed a new extended elasticity model which can describe elasticity of materials with fractional non-locality, memory and fractality (Tarasov and Aifantis 2015). Malara and Spanos (2017) discussed an approximated method to determine the non-linear response of a plate based on the fractional calculus and the results has been assessed versus Monte Carlo data. Sumelka et al. (2015) presented the space-fractional non-local Euler–Bernoulli beam theory. They showed that the theory provides better approximation for the experimental Young’s modulus values. Rahimi et al. (2017a) presented a non-integer non-local model using conformable derivative definition and investigated its application to static instability of nano-beams under electrostatic force. As in previously mentioned papers they showed that the non-integer model is in a better agreement to the experimental data than the classical Eringen non-local theory and classical (local) theory. Failla et al. (2013) presented a two-dimensional foundation model using a mechanically based non-local elasticity theory in form of fractional calculus. Carpinteri et al. (2014) investigated a spatial fractional model for materials whose non-local stress is defined as fractional integral of the strain field. D’Elia and Gunzburger (2013) analyzed a non-local diffusion operator having as special cases the fractional Laplacian and fractional differential operators that arise in several applications. More recently, Evgrafov and Bellido studied the case when the Eringen non-local theory is in general ill-posed in the case of smooth kernels; moreover, they have also considered the case of singular, non-smooth kernels.
In this paper, a non-local fractional stress–strain gradient theory has been investigated, using conformable derivative. This formulation includes two new free parameters, namely the fractional parameters which control the stresses and the strains gradients orders in the constitutive relation, respectively. As an illustrative example, free vibration, bending and buckling of S–S nano-beam have been studied and the meaning of the fractional parameters beside the non-local and the length scale parameters has been shown. Note that the values of the fractional parameters considered were 1 < α ≤ 2. It should be pointed out that the presented conformal non-local model includes the classical theory, the non-local strain gradient theory (Lim et al. 2015), the Eringen non-local theory (Eringen 1972, 1983), the strain gradient theory (Mindlin 1964, 1965; Lazopoulos 2009; Rahimi et al. 2018a), the general Eringen non-local theory (Rahimi et al. 2017a) and the general strain gradient theory therefore it combines the flexibility and power of the previous ones.
2 Mathematical construction of the non-local fractional stress–strain gradient theory
According to the stress and strain gradient theories the constitutive equation for the beam is (Wong et al. 1997):
where txx is the stress field that contains not only the non-local elastic stress field, but also the strain gradient field, εxx is the strain, e0a denote the non-local parameter (where e0a is a material constant, and a is the internal characteristic lengths (e.g. lattice parameter, granular size)), E is the Young’s modulus and \(l\) is the material length scale parameter.
Now, let us consider the general form of Eq. (1) using the non-integer order calculus as bellow:
where α1 and α2 are the fractional parameters and they control the gradient orders in the constitutive relation and can take integer or non-integer values. In should be emphasized that in the case of α1 = 2 Eq. (2) reduces to the classical strain gradient theory, and in the case of \(l = 0\) it takes the form of the general Eringen theory (Jing et al. 2006; Agrawal et al. 2008):
Note that as it is shown in Fig. 1, the general Eringen theory (Eq. 3) is a subset of non-local fractional stress–strain gradient theory (Eq. 2).

The summary of relations between the developed non-local fractional stress–strain gradient theory and other theories
All the relations between the developed fractional stress–strain gradient theory and other theories have been shown in Fig. 1. As it can be seen, six theories (the classical theory, the Eringen non-local theory, the strain gradient theory, the non-local strain gradient theory, the general Eringen non-local theory, and the general strain gradient theory) can be obtained from the proposed formulation, which is the property that makes the overall formulation to be a powerful phenomenological model of physical phenomena.
3 Mathematical modeling
In this section the application of the developed theory in the nano-scale is presented.
3.1 Conformable derivative definition
Let f, g: [0, ∞) → R and x, y > 0 then the conformable derivative definition is (Rahimi et al. 2017a):
where α ∈ (n, n + 1], f is (n + 1)-differentiable at x > 0 and \(\left\lceil \alpha \right\rceil\) is the smallest integer greater than or equal to α. In the case of α = n it reduces to classic form:
This definition makes the modeling more flexible than classical derivative as one can use both integer and non-integer derivatives order. Herein, it gives us the possibility of studding the effects of non-integer strain and stress derivatives in the constitutive relation.
3.2 Mathematical modeling of motion of a nano-beam
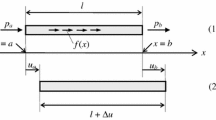
We assume that the displacement fields of S–S nano-beam (of Euler–Bernoulli type) (cf. Figure 2) obtain the form as bellow:
where u1, u2 and u3 are displacement in x, y and z directions respectively, u and w are axial and transverse displacements of middle axis. Therefore the only non-zero linear strain is
The Hamilton’s principle for the analyzed system is
where the virtual strain energy is defined as
where
and \(\beta_{1} (x,x^{\prime},e_{1} a)\) and \(\beta_{2} (x,x^{\prime},e_{2} a)\) are functions for the classical stress tensor and the strain gradient stress tensor, respectively. The virtual kinetic energy has the form
and the virtual potential energy of external loads is expressed as

A schematic view of a S–S nano beam
Next, by substituting Eqs. (8), (10) and (11) in Eq. (7) and considering the bending moment M and the axial force N defined as
where A is the section area of the nano-beam, we have
Taking now Eq. (2) and multiplying it by zdA and applying integration through the beam length from 0 to L leads to
Finally, by using the conformable derivative definition and considering 1 < α1, α2 ≤ 2, Eq. (14) will be:
In the last step, to obtain the general form of Euler–Bernoulli beam equation of motion one takes the second derivative of Eq. (15), the second derivative of M from Eq. (13), and put it to Eq. (15), hence
For convenience, the following non-dimensional parameters are used:
therefore, the non-dimensional form of Eq. (16) is
where
4 Numerical solution
In this section the numerical solution of bending, free vibration and buckling of nano-beams structures have been shown.
4.1 Galerkin residual method
The presented numerical solution for different configurations of Eq. (18) which include the conformal derivatives is less difficult compared to the application of fractional derivatives which have integral form like the Caputo, the Riemann–Liouville or the Grunwald–Letnikov. For the latter, many advanced numerical methods have been elaborated to present approximate solutions (Shah et al. 2017; Al-Smadi et al. 2017; Bhrawy and Alofi 2013; Secer et al. 2013; Rahimkhani et al. 2017). Herein, due to the final form, the governing conformal equations have been solved applying the classical Galerkin residual method (Rashidi et al. 2018; Rahimi et al. 2018b).
4.2 Free vibration
Based on the Galerkin method the approximate solution for dynamic system is
where φi(x) and qi(t) are the mode shapes and a time dependent functions to be determined, respectively. Herein φ(x) is selected as the i-th undamped linear mode shape of the straight nano-beam. Substituting Eq. (19) into Eq. (18), multiplying the outcome by \(\varphi_{j} \text{ }(\hat{x})\), using the orthogonality property of mode shapes, and integrating the outcome from 0 to 1 leads to
where
4.3 Bending
Based on the Galerkin method the approximate solution for static system is
The equation for statics is obtained by neglecting the inertia terms, and axial force in Eq. (18). Next substituting Eq. (22) into reduced Eq. (18), multiplying result by \(\varphi_{j} \text{ (}\hat{x}\text{)}\) as a weight function and then integrating the outcome from 0 to 1, leads to a set of linear algebraic equations
where
4.4 Buckling
Equations for buckling analysis are obtained by neglecting the inertia and transverse force terms in Eq. (18), and next by substituting Eq. (22) into it, together with multiplying the result by \(\varphi_{j} \text{ (}\hat{x}\text{)}\) and then integrating the outcome from 0 to 1 leads to
where
5 Results
The effects of the different parameters (the fractional, the length scale and the non-local parameters) on free vibration, bending and critical buckling load of nano-beams structures have been illustrated below. Firstly, the validation of the results has been shown in Tables 1, 2, 3, 4, 5 and 6 are compared with Reddy (2007), Rahimi et al. (2017b), Aydogdu (2009), Khaniki (Khaniki et al. 2018), Lu (Lu et al. 2017) and Li and Hu (2015) based on the Eringen non-local theory, classical theory, strain gradient theory, non-local strain gradient theory and the fractional non-local theory. As it can be seen, the outcomes are in good agreement with those published in literature.
In following discussion, let us assume for convenience that the derivative orders α1 and α2 are equal α. As mentioned above, this theory consists of four free parameters that make it more flexible. In Tables 7, 8 and 9, the effects of different parameters are shown. Recall, that although any interval (n < α ≤ n + 1 in which n is positive integer number) of the fractional order can be assumed, herein it is considered 1 < α ≤ 2. The values of the non-local parameter and the length scale parameter are considered based on those existing in the literature (Rahimi et al. 2017b; Li and Hu 2015; Reddy 2007; Li et al. 2016).
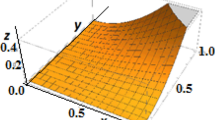
As it can be seen in Table 7, decreasing of the fractional parameter causes decrease in the non-dimensional natural frequency, and as the value of the length scale parameter increases it causes the opposite effect. On the other hand, for a constant beam length and constant fractional parameter, the increase of e0a causes decrease in the non-dimensional natural frequency. The variation of the non-dimensional natural frequency versus the fractional parameter and the length scale parameter has been illustrated in more details in Fig. 3. The non-local parameter is chosen e0a = 1 nm.

The influence of the length scale and the fractional parameters on the non-dimensional fundamental natural frequency when e0a = 1 nm
In Table 8 different values of the non-dimensional static maximum center deflection are presented when the fractional, the length scale and the non-local parameters have different values. It is visible in Table 8 (and also in Fig. 4) that decrease of the fractional parameter decreases the beam stiffness. On the other hand, keeping the fractional and the length scale parameters constant, growth of the non-local parameter rises down the stiffness. Moreover, increase of the length scale at first decrease and then increase the stiffness slightly when both the length and the non-local parameters are constant.

The influence of the length scale and the fractional parameters on the non-dimensional center deflection when e0a = 1 nm
In Table 9 the non-dimensional critical buckling load of S–S nano-beam is presented. It is clear that when the length scale and the non-local parameters are constant smaller values of the fractional parameters leads to smaller values of non-dimensional critical buckling load. Moreover, when the fractional parameter is constant, growth of the length scale and the non-local parameters causes the increase and decrease of the non-dimensional critical buckling load, respectively. These effects are shown in Fig. 5 also.

The influence of the length scale and the fractional parameters on the critical non-dimensional buckling load when e0a = 1 nm
6 Conclusion
In this paper, the non-local fractional stress–strain gradient theory was investigated using fractional calculus. This new formulation has two additional free parameters versus the classical gradient theory which are called fractional parameters. Theses parameters control the strain and stress gradient orders in the constitutive relation and can be integer or non-integer. The proposed theory includes the classical theory, the non-local strain gradient theory, the Eringen non-local theory, the strain gradient theory, the general Eringen non-local theory and the general strain gradient theory.
The proposed theory is illustrated by the analysis of free vibration, bending and buckling of S–S nano-beam structures. The influence of all free parameters (the fractional parameters, the length scale parameter and the non-local parameters) was discussed in details. The specific solutions were obtained by the Galerkin residual method and the following results were achieved:
Decreasing of the fractional parameter decreases the non-dimensional natural frequency (for higher values of the length scale parameter such effect is less pronounced).
When the beam length and fractional parameter are constant, increase of the non-local parameter causes decrease in the non-dimensional natural frequency.
Decrease of the fractional parameter decreases the beam stiffness.
When the fractional and the length scale parameters are constant, growth of the non-local parameter rises down the stiffness.
When the fractional and non-local parameters are constant, growth of the length scale parameter rises down and then rises up the stiffness with a slight slope.
When the length scale and the non-local parameters are constant smaller values of the fractional parameters leads to smaller values of non-dimensional critical buckling load.
When the fractional parameter is constant, growth of the length scale and the non-local parameters cause increase and decrease of the non-dimensional critical buckling load, respectively.
References
Agrawal, R., Peng, B., Gdoutos, E.E., Espinosa, H.D.: Elasticity size effects in ZnO nanowires—a combined experimental-computational approach. Nano Lett. 8(11), 3668–3674 (2008)
Al-Smadi, M., Freihat, A., Khalil, H., Momani, S., Ali Khan, R.: Numerical multistep approach for solving fractional partial differential equations. Int. J. Comput. Methods 14(03), 1750029 (2017)
Aydogdu, M.: A general non-local beam theory: its application to nanobeam bending, buckling and vibration. Phys. E 41(9), 1651–1655 (2009)
Bhrawy, A.H., Alofi, A.S.: The operational matrix of fractional integration for shifted Chebyshev polynomials. Appl. Math. Lett. 26(1), 25–31 (2013)
Cao, G., Chen, X.: Energy analysis of size-dependent elastic properties of ZnO nanofilms using atomistic simulations. Phys. Rev. B 76(16), 165407 (2007)
Carpinteri, A., Cornetti, P., Sapora, A.: Nonlocal elasticity: an approach based on fractional calculus. Meccanica 49(11), 2551–2569 (2014)
Challamel, N., Zorica, D., Atanacković, T.M., Spasić, D.T.: On the fractional generalization of Eringenʼs non-local elasticity for wave propagation. Comptes Rendus Mécanique 341(3), 298–303 (2013)
D’Elia, M., Gunzburger, M.: The fractional Laplacian operator on bounded domains as a special case of the nonlocal diffusion operator. Comput. Math Appl. 66(7), 1245–1260 (2013)
da Graça Marcos, M., Duarte, F.B., Machado, J.T.: Fractional dynamics in the trajectory control of redundant manipulators. Commun. Nonlinear Sci. Numer. Simul. 13(9), 1836–1844 (2008)
Diao, J., Gall, K., Dunn, M.L., Zimmerman, J.A.: Atomistic simulations of the yielding of gold nanowires. Acta Mater. 54(3), 643–653 (2006)
Eringen, A.C.: Non-local polar elastic continua. Int. J. Eng. Sci. 10, 1–16 (1972)
Eringen, A.C.: On differential equations of non-local elasticity and solutions of screw dislocation and surface waves. J. Appl. Phys. 54(9), 4703–4710 (1983)
Failla, G., Santini, A., Zingales, M.: A non-local two-dimensional foundation model. Arch. Appl. Mech. 83(2), 253–272 (2013)
Faraji Oskouie, M., Ansari, R., Rouhi, H.: Bending analysis of functionally graded nanobeams based on the fractional non-local continuum theory by the variational legendre spectral collocation method. Meccanica 53(4), 1115–1130 (2018)
Hadjesfandiari, A. R., Dargush, G. F.: Foundations of consistent couple stress theory. arXiv preprint arXiv:1509.06299 (2015)
Hilfer, R.: Applications of fractional calculus in physics. In: Hilfer, R. (ed.) Applications of Fractional Calculus in Physics. World Scientific Publishing, Singapore (2000)
Jing, G.Y., Duan, H., Sun, X.M., Zhang, Z.S., Xu, J., Li, Y.D., Wang, J.X., Yu, D.P.: Surface effects on elastic properties of silver nanowires: contact atomic-force microscopy. Phys. Rev. B 73(23), 235409 (2006)
Khaniki, H.B., Hosseini-Hashemi, S., Nezamabadi, A.: Buckling analysis of nonuniform non-local strain gradient beams using generalized differential quadrature method. Alex. Eng. J. 57(3), 1361–1368 (2018)
Lazopoulos, K.A.: On bending of strain gradient elastic micro-plates. Mech. Res. Commun. 36(7), 777–783 (2009)
Li, L., Hu, Y.: Buckling analysis of size-dependent nonlinear beams based on a non-local strain gradient theory. Int. J. Eng. Sci. 97, 84–94 (2015)
Li, X., Bhushan, B., Takashima, K., Baek, C.W., Kim, Y.K.: Mechanical characterization of micro/nanoscale structures for MEMS/NEMS applications using nanoindentation techniques. Ultramicroscopy 97(1–4), 481–494 (2003)
Li, L., Li, X., Hu, Y.: Free vibration analysis of non-local strain gradient beams made of functionally graded material. Int. J. Eng. Sci. 102, 77–92 (2016)
Liebold, C., Müller, W.H.: Applications of strain gradient theories to the size effect in submicro-structures incl. experimental analysis of elastic material parameters. Bull. TICMI 19(1), 45–55 (2015)
Lim, C.W., Zhang, G., Reddy, J.N.: A higher-order non-local elasticity and strain gradient theory and its applications in wave propagation. J. Mech. Phys. Solids 78, 298–313 (2015)
Lu, L., Guo, X., Zhao, J.: Size-dependent vibration analysis of nanobeams based on the non-local strain gradient theory. Int. J. Eng. Sci. 116, 12–24 (2017)
Malara, G., Spanos, P.D.: Nonlinear random vibrations of plates endowed with fractional derivative elements. Probab. Eng. Mech. (2017). https://doi.org/10.1016/j.probengmech.2017.06.002
Mindlin, R.D.: Micro-structure in linear elasticity. Arch. Ration. Mech. Anal. 16, 51–78 (1964)
Mindlin, R.D.: Second gradient of strain and surface-tension in linear elasticity. Int. J. Solids Struct. 1, 417–438 (1965)
Olsson, P.A., Melin, S., Persson, C.: Atomistic simulations of tensile and bending properties of single-crystal bcc iron nano-beams. Phys. Rev. B 76(22), 224112 (2007)
Rahimi, Z., Rezazadeh, G., Sumelka, W., Yang, X.J.: A study of critical point instability of micro and nano beams under a distributed variable-pressure force in the framework of the inhomogeneous non-linear non-local theory. Arch. Mech. 69(6), 413–433 (2017a)
Rahimi, Z., Sumelka, W., Yang, X.J.: Linear and non-linear free vibration of nano beams based on a new fractional non-local theory. Eng. Comput. 34(5), 1754–1770 (2017b)
Rahimi, Z., Rezazadeh, G., Sadeghian, H.: Study on the size dependent effective Young modulus by EPI method based on modified couple stress theory. Microsyst. Technol. 24(7), 2983–2989 (2018)
Rahimi, Z., Sumelka, W., Shafiei, S.: The analysis of non-linear free vibration of FGM nano-beams based on the conformable fractional non-local model. Technical Sciences, Bulletin of the Polish Academy of Sciences (2018b)
Rahimkhani, P., Ordokhani, Y., Babolian, E.: A new operational matrix based on Bernoulli wavelets for solving fractional delay differential equations. Numer. Algorithm 74(1), 223–245 (2017)
Rashidi, H., Rahimi, Z., Sumelka, W.: Effects of the slip boundary condition on dynamics and pull-in instability of carbon nanotubes conveying fluid. Microfluid. Nanofluid 22(11), 131 (2018)
Ray, S. S., Atangana, A., Oukouomi Noutchie, S. C., Kurulay, M., Bildik, N., Kilicman, A.: Editorial: Fractional calculus and its applications in applied mathematics and other sciences. Math. Probl. Eng. (2014). https://doi.org/10.1155/2014/849395
Reddy, J.N.: Non-local theories for bending, buckling and vibration of beams. Int. J. Eng. Sci. 45(2–8), 288–307 (2007)
Sadeghian, H., Yang, C.K., Goosen, J.F.L., Van Der Drift, E., Bossche, A., French, P.J., Van Keulen, F.: Characterizing size-dependent effective elastic modulus of silicon nanocantilevers using electrostatic pull-in instability. Appl. Phys. Lett. 94(22), 221903 (2009)
Sapora, A., Cornetti, P., Chiaia, B., Lenzi, E.K., Evangelista, L.R.: Non-local diffusion in porous media: a spatial fractional approach. J. Eng. Mech. 143(5), D4016007 (2017)
Secer, A., Alkan, S., Akinlar, M.A., Bayram, M.: Sinc–Galerkin method for approximate solutions of fractional order boundary value problems. Bound. Value Probl. 2013(1), 1 (2013)
Shah, F.A., Abass, R., Debnath, L.: Numerical solution of fractional differential equations using Haar wavelet operational matrix method. Int. J. Appl. Comput. Math. 3(3), 2423–2445 (2017)
Sumelka, W., Blaszczyk, T., Liebold, C.: Fractional Euler–Bernoulli beams: theory, numerical study and experimental validation. Eur. J. Mech. A/Solids 54, 243–251 (2015)
Tarasov, V.E., Aifantis, E.C.: Toward fractional gradient elasticity. J. Mech. Behav. Mater. 23(1–2), 41–46 (2014)
Tarasov, V.E., Aifantis, E.C.: Non-standard extensions of gradient elasticity: fractional non-locality, memory and fractality. Commun. Nonlinear Sci. Numer. Simul. 22(1–3), 197–227 (2015)
Wong, E.W., Sheehan, P.E., Lieber, C.M.: Nanobeam mechanics: elasticity, strength, and toughness of nanorods and nanotubes. Science 277(5334), 1971–1975 (1997)
Yang, X.J.: Advanced Local Fractional Calculus and its Applications. World Science Publisher, New York (2012)
Zhu, R., Pan, E., Chung, P.W., Cai, X., Liew, K.M., Buldum, A.: Atomistic calculation of elastic moduli in strained silicon. Semicond. Sci. Technol. 21(7), 906 (2006)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Rahimi, Z., Rezazadeh, G. & Sumelka, W. A non-local fractional stress–strain gradient theory. Int J Mech Mater Des 16, 265–278 (2020). https://doi.org/10.1007/s10999-019-09469-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10999-019-09469-7