
Abstract
An overview is given on remarkable progress that has been made in theoretical studies of solitons and other nonlinear wave patterns, excited during the deformation of fault block (fragmented) geological media. The models that are compliant with the classical and perturbed sine-Gordon equations have only been chosen. In these mathematical models, the rotation angle of blocks (fragments) and their translatory displacement of the medium are used as dynamic variables. A brief description of the known models and their geophysical and geodynamic applications is given. These models reproduce the kinematic and dynamic features of the traveling deformation front (kink, soliton) generated in the fragmented media. It is demonstrated that the sine-Gordon equation is applicable to the description of series of the observed seismic data, modeling of strain waves, as well as the features related to fault dynamics and the subduction slab, including slow earthquakes, periodicity of episodic tremor and slow slip (ETS) events, and migration pattern of tremors. The study shows that simple heuristic models and analytical and numerical computations can explain triggering of seismicity by transient processes, such as stress changes associated with solitary strain waves in crustal faults. The need to develop the above-mentioned new (nonlinear) mathematical models of the deformed fault and fragmented media was caused by the reason that it is impossible to explain a lot of the observed effects, particularly, slow redistribution and migration of stresses in the lithosphere, within the framework of the linear elasticity theory.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
During the recent decade, the sine-Gordon equation has been successfully applied for mathematical modeling of fault dynamics, mechanisms of rotation and slippage of the crustal blocks generating strain waves and earthquakes, and, also, for interpretation of the observed seismic and deformation effects (Nikolaevskii 1995; Nikolaevskiy 1996; Garagash 1996; Wu and Chen 1998; Mikhailov and Nikolaevskiy 2000; Bykov 2001a, 2006, 2008; Majewski 2006; Vikulin 2008; Gershenzon et al. 2009, 2011). Development of these models was motivated, in the first place, by an intention to obtain equation solutions in the shape of slow solitary inertial strain waves recorded in fault block geological media.
The sine-Gordon equation applied for the fault block (fragmented) geological medium is, eventually, heuristic. In the overviewed models, the sine-Gordon equation was postulated, and physical interpretation of the equation summands was given and the elements used from the known theories were clarified. Validity of applying the sine-Gordon equation to geological media is proven by the fact that its solutions and implications are affirmed by comparison with observations. Furthermore, the sine-Gordon soliton may stop (without changing its topology) and move again. This provides the possibility of modeling fault dynamics.
The sine-Gordon equation, first obtained for the description of dislocation motion in crystals (Frenkel and Kontorova 1938), was then successfully used for other effects in the theory of ferromagnetism, quantum optics, physics of elementary particles, and biology (Scott 2003; Braun and Kivshar 2004; Aero et al. 2009). However, the sine-Gordon equation has been relatively recently applied in geomechanics and seismology for mathematical modeling of seismic and deformation processes connected with their “microstructure” motion on much larger scale than that of turning blocks (fragments) in crushed geological media (Nikolaevskii 1995; Garagash 1996; Garagash and Nikolaevskiy 2009).
Comprehensive information on the sine-Gordon equation, its solutions and their properties, can be found in remarkable papers and monographs (Kivshar and Malomed 1989; Braun and Kivshar 1998; Lamb 1980; Whitham 1974; Dodd et al. 1982; Braun and Kivshar 2004).
The classical sine-Gordon equation has a number of qualitatively different precise analytical solutions in the shape of kinks, solitary waves (solitons), and slow and fast cnoidal waves (see Appendix), and a specific course of evolution of the modeled fault block system corresponds to each of the solutions (Bykov 2000). This significantly simplifies the analysis and contributes to obtaining the most reliable results when studying natural objects.
There are two different physical mechanisms of generation of strain waves. The first mechanism is allowing for rotational and translational motions of blocks in the fault zone or inside the fault body when the fault boundaries are relatively displaced. The second mechanism is taking account of relative displacement of a fault boundary at rigid fixation of blocks (grains) at the surface of another fault boundary. Rigorous physical backgrounds (prerequisites) were provided for the development of two types of models. They are the following.
Rotational motions due to earthquake were actually registered in proximity to faults. Numerous data are published on this point in a Bulletin of the Seismological Society of America special issue on Rotational Seismology and Engineering Applications (Lee et al. 2009). Some of them are mentioned below. The following citation is from Takeo (2009, p. 1457): “We observed six components of ground rotational and translational motions in a near-field region during an earthquake swarm in April 1998 offshore Ito, Izu Peninsula, Japan. … These rotational motions are much larger than those calculated by array data at the San Andreas fault.” Wu et al. (2009, p. 1468) report: “Measurements in the near field of earthquakes in Japan and in Taiwan indicate that rotational ground motions are many times larger than expected from the classical elasticity theory. … Both rotational and translational ground motions are being monitored along the active Meishan fault, where a major earthquake occurred in 1906, more than a century ago.”
When constructing equations of motion, this fact (rotational motions of turning blocks) was accounted for in the following way: the symmetric part of the stress tensor (as in the micropolar theory of elasticity) was assumed to be proportional to the deformation (or its rate), while the antisymmetric part was taken to be proportional to the sine of the rotation angle (or angular velocity) of the fault blocks (see Eqs. (5)–(7)). In the final result, this made it possible to obtain a solution in the shape of slow waves, propagating at velocities of the order of 10–100 km/year, which correspond to strain (tectonic) waves recorded by various methods. The elasticity, or viscoelasticity, or elastoplasticity models (without account of fragments rotation) do not produce such results.
The models of the second type are appropriate to a different real situation, when the surfaces of fault boundaries exhibit a periodic structure. Such a concept is based on the analysis of numerous in situ and laboratory observations (Power and Tullis 1991). It is reported in this paper (p. 423): “Preliminary examination of surface profile data from natural fault and fracture surfaces indicates most natural rock surfaces are approximately self-similar, although some have self-affine character within small wavelength bands.” The topography of the fault surfaces has a fractal or affine structure, i.e., it is a summation of sinusoids with different wavelength relations—periodic structure with an irregularity specified by the threshold height of the asperities (Power and Tullis 1991). Therefore, developing of the models of this type suggested the appearance of the additional periodic “restoring” force due to displacement of the sinusoidal-homogeneous surfaces of the fault, and that force is striving to return the fault back to the state of equilibrium after local displacement. The force has the meaning of the tangential component of the reaction force of the quasi-sinusoidal surface of one fault boundary which is responding to the displacement of the other fault boundary.
Quite recently, it has been established during laboratory experiments (Di Bartolomeo et al. 2012) that, actually, the tangential force (“tangential contact force”) appears at the contact of blocks of rocks acting in the plane of slippage (see p. 128, Fig. 15). The value of this tangential force at relative block slippage varies in adherence to the periodic law. In the mathematical models of the second type, this fact is taken into account by including the restoring force, which contains the periodic sine function, to the equation of motion—see Eqs. (17) and (24).
The principal goals of the paper are as follows: (i) to give an overview of the mathematical models of fault block (fragmentary) geological media, leading to the classical or perturbed sine-Gordon equations, and the methods allowing the construction of these equations for some specific geomechanical and seismological problems and (ii) to show the application of mathematical models for explanation of the observed effects and the conditions for their occurrence in geological media.
The paper is organized as follows. In Section 2, the observational data of seismic migration and strain waves are presented. In Section 3, the theoretical models of strain waves and examples illustrating the application of solutions of the classical sine-Gordon equation to fault dynamics are given. Section 4 contains the application of solutions of the perturbed sine-Gordon equation to fault dynamics and the description of strain waves. Section 5 presents the concluding remarks. In the Appendix, some appropriate solutions of the classical sine-Gordon equation are extracted.
2 Observational evidence
The concept of strain (tectonic) waves generated in the Earth is based on the results of the study of spatiotemporal earthquake distribution and slow tectonic deformation processes and the transfer of geophysical field anomalies in close proximity to fault zones.
Special direct or indirect observations can reveal the speed of strain propagation and other parameters of slow motion. Monitoring of seismicity and strain by dense instrumental networks indicates the wave-like behavior of stress and strain changes which are driven by active geodynamic processes and are responsible for time-dependent variations in seismic velocity or lithospheric deformation. Propagation of strain waves is represented quantitatively by the rates of earthquake migration and geophysical responses to active faulting. These processes, and possibly the related strain waves, are either of global (global tectonic waves) or local (strain waves in faults) scales (Bykov 2005).
Global tectonic waves propagating at velocities from 10 to 100 km/year are detected from migration of large earthquakes (Fig. 1a) (Stein et al. 1997), seismic velocity anomalies (variations in velocity, travel time, and travel time residuals, and other parameters of the seismotectonic process) (Fig. 1b, c) (Lukk and Nersesov 1982; Nevsky et al. 1987), offsets of water level in wells along faults (Barabanov et al. 1988), cyclic wandering of nonseismic belts in the mantle (Malamud and Nikolaevskii 1983; 1985), or from transient displacement of seismic reflectors (Fig. 1d) (Bazavluk and Yudakhin 1993, 1998). Direct geodetic measurements established migration of deformation processes in fault zones of some aseismic and seismoactive areas at an annual speed of 2–4 to 20–30 km/year (Kuz’min 2012).

Signatures of global tectonic waves. a Migration of large historic earthquakes along North and East Anatolian faults (Stein et al. 1997): 1 earthquakes, 2 hypothetical earthquakes, 3 active fault, 4 fault branch, 5 direction of earthquake migration, 6 slip; numerals are earthquake dates. b Time series of P velocity in different parts of Garm test ground (Tajikistan) (Lukk and Nersesov 1982). c Time series of residuals, from seismic stations HAZ, BCG, HCR (San Andreas, Central California, USA) (Nevsky et al. 1987). d Time-dependent changes in positions of seismic reflectors beneath stations ANV (Anan’yevo) and KDS (Kadjisai, Tien Shan) (Bazavluk and Yudakhin 1998). Conversion boundaries of different intensities: 1 over 20 converted waves, 2 over 15 waves, 3 about 5 waves
Strain waves along crustal faults at velocities of 1–10 km/day are inferred from radon, electrokinetic, and hydrogeodynamic signals, such as solitary waves (Fig. 2a–c) (Nikolaevskiy 1998).

Implicit indicators of strain waves along crustal faults. a Radon concentration in Guzan before Luhao earthquake (pointed by arrow) (Nikolaevskiy 1998). b Staggered water level fluctuations in Kim (1) and Asht (2) wells near Ashkhabad (Nikolaevskiy 1998). c Electrokinetic pulses measured by a pair of electrodes during earthquake (Nikolaevskiy 1998)
The recent discovery of episodic tremor and slip (ETS) in subduction zones is based on slow slip episodes visible during global positioning system (GPS) observations correlated with nonvolcanic tremor signals on broadband seismometers. Tremor and slow slip migrates along faults at a rate of 10 km/day, on an average (Rogers and Dragert 2003; Schwartz and Rokosky 2007).
All the more, two distinctly identified sequences of foreshocks migrate at rates of 2 to 10 km/day along the trench axis toward the epicenter of the 2011 moment magnitude (M w) 9.0 Tohoku-Oki earthquake in Japan. GPS observations have shown migration of two sequences in the propagation of slow slip events along the plate interface toward the initiation point of the mainshock rupture (Kato et al. 2012). The slow slip migration speeds of 2 to 10 km/day are comparable to those of episodic tremor and slow slip events found along deeper extensions of warm subduction zones. This supports interpretation of the foreshock migration as propagation of slow slip.
Thus, a quite large collection of observational data provides either explicit or implicit evidence for the probability of strain wave propagation in the crust, lithosphere, and subduction zones at different rates.
There exist in nature two types of transfer: of energy and matter. Matter transfer (movement of the block geological medium) does not occur during foreshock migration, tremor, and slow slip. Therefore, energy (stress) transfer should occur in the shape of a wave (wave process).
3 The classical sine-Gordon equation in models of tectonic stress transfer and strain waves
The most important geodynamic problem is concerned with clarifying the mechanisms of propagation and redistribution of energy of the deformation processes and tectonic stress migration within the crust and the lithosphere. Propagation and redistribution of the major portion of energy of the deformation process in the block geological medium are related to slow movements. Slow stress transfer occurs in the lithosphere in the shape of strain (tectonic) waves excited in the crustal and lithospheric faults during interaction of individual structural elements (blocks and microplates).
Let us consider the main models of the deformation processes in the crust, which are compliant with the classical sine-Gordon equation.
3.1 Slow solitary waves of the rotational type in fragmented media
Strain waves detected by noting the variations in geophysical fields are accompanied by migration of seismic activity in a number of cases. To consider slow tectonic strain waves, Nikolaevskii (1995, 1996) developed the elastic mathematical model, corresponding to the microplate structure of the lithosphere (the crust or cataclastically fragmented massif) and taking into consideration the inertia of kinematically independent rotations of Ф microplates. The corresponding modification of the Cosserat mechanics has led to the balance of moments of momentum in the form of the sine-Gordon equation.
During the simplest movement, displacements u i are rigidly related to the rotation angle Φ k by the vector rule, where
Here, ε ijk is the Levi-Civita tensor, N is the given body moment of force; J is the moment of inertia per unit block volume; G ∗ and ρ ∗ are the effective rigidity and density of the fragmented massif; ρ is the density of continuous geomaterial; ρ 0 is the true fragment density; c i denotes the velocities of waves (waves of block rotation and seismic shear waves); d i designates the internal length scales; and Λ identifies the rotation moduli.
If the volumetric moment M is determined by the restoring force f and the radius of fragment rotation \( R\sim \sqrt{J} \), then
and Eq. (1) for the one-dimensional case takes on the form of the classical sine-Gordon equation:
One of the solutions of Eq. (3) is a soliton-like wave called a kink:
From (4), it follows that in the fragmented geological medium or in the cataclastically fragmented body of the fault, propagation of slow solitary waves due to block microrotations is possible. These waves are moving with velocities a great number of orders of magnitude less than those of seismic waves. At fitting of real parameters, expression (4) is compliant with the wave propagating at a velocity of 10 km/day = 0.12 m/s, which is consistent with the concepts on tectonic wave.
3.2 Tectonic waves of the rotational type
The mathematical model of slow rotational tectonic wave propagation with seismic shear wave radiation has been formulated by Mikhailov and Nikolaevskiy (2000). The model is consistent with seismological and geophysical observations. The same concepts of the Cosserat mechanics allowing for dynamics of rotations of particles forming the continuous medium were taken as a basis. In this model, the geological medium is composed of separate rigid blocks capable of performing microrotations independent of translatory displacements. It is suggested that block rotation is performed in the X, Y plane, whereas the vector of block rotation has the only non-zero component along the Z axis. The displacements in the shear wave propagating along the X axis have only one component not equal to zero \( Y\left(\begin{array}{cc}\hfill {u}_x={u}_z=0,\hfill & \hfill {u}_y\ne 0\hfill \end{array}\right) \), and the mаss velocity is determined as v y = ∂u y /∂t.
An account of the block structure of the medium with a constant density ρ corresponds to the balance of moment of momentum equation; see, for example (Eringen 1968):
where ρJ is the specific moment of inertia of an averaged block (values of J have an order of the block radius square); M xz denotes the couple stress; Φ z is the vector of an average microrotation (it is related to the rotation of specific volume, containing a number of blocks as a unit); ω z is the vector of an average rotation of one block; and σ a xy is the antisymmetric part of the stress tensor.
The mathematical model is closed by a quantity of movement moment balance equation:
where σ xy is the stress tensor.
The symmetric part of the stress tensor is proportional to the deformation, while the antisymmetric part is proportional to the sine of the rotation angle (Nikolaevskiy 1996):
The couple stresses M xz which are generated just due to the block structure of the massif are proportional to the gradient of the rotation angle:
Substitution of expressions (7) and (8) into Eqs. (5) and (6) yields:
where
Here, C G is the velocity of the seismic shear wave; C Λ is the velocity of the wave of block rotation; d 1 and d 2 are the internal scales; and G ∗ and ρ ∗ denote the effective rigidity and density of the fragmented rock massif.
Introduction of the running coordinate ξ = x − Vt and the notations u y ≡ u and ω z ≡ ω neglecting the microrotation Φ z brings the system of Eqs. (9)–(10) to the form:
The expressions for displacement u and velocity of microrotation ω t have the following forms:
The characteristic parameter values of the crust and the block sizes are as follows: C G = 1, 200 m/s; C Λ = 1 m/s; ρ = 3 g/cm3; G = 4.3 ⋅ 109 N/m; N = 10− 1 G; \( R=\sqrt{J}=100\kern0.75em \mathrm{m} \); β = 10− 1 s; and γ = 1.4 ⋅ 108 s2. According to the computation results performed by Mikhailov and Nikolaevskiy (2000), the rotational wave propagation velocity attends to some kilometers per year, i.e., actually, crustal block (fragment) rotations are the cause for the occurrence of such type of strain waves (solitary tectonic waves).
3.3 Wave dynamics of the deformation processes in the transform fault
The solution of the sine-Gordon equation in the shape of slow cnoidal waves has been quite recently applied for mathematical modeling of wave dynamics of the deformation processes at plate boundaries in transform fault zones and for the related effects (Gershenzon et al. 2009). The one-dimensional Frenkel-Kontorova model, well-known from the theory of dislocations in crystal materials, is applied to the simulation of the process of stress propagation along transform faults. The model simulates the situation when strain waves are excited at constant tectonic loading, and a short-term slow slip event occurs at the plate contacts. It is physically based on the qualitative analogy between the motions at plate boundaries and the processes of plastic deformation in crystals. The model suggests that plate displacement along a fault takes place due to the dislocation motion along the plate boundary (the term “dislocation” is used here as presented in the Frenkel-Kontorova model). The shear of the dislocation may weaken the deformation and stress. The average density of dislocations is proportional to the average deformation at the plate boundary, whereas the average dislocation rate corresponds to the strain wave velocity. Dynamic parameters of plate boundary earthquakes as well as slow earthquakes and afterslip are quantitatively described, including propagation velocity along the strike, plate boundary velocity during and after the strike, stress drop, displacement, extent of the rupture zone, and spatiotemporal distribution of stress and strain. The model describes the states of the fault, corresponding to all stages of the seismic cycle: interseismic (creep), preseismic, coseismic, and postseismic (afterslip).
The model is compatible with the classical sine-Gordon Eq. (15), one of which solutions has the shape of slow cnoidal waves, a pulse sequence with a spatial period 2m(1 − β 2)1/2 K(m), where K(m) is the complete elliptical integral of the first kind:
Here, u is the plate displacement along the fault; t is the time; b is the characteristic size of asperities on the fault plane; c is the compressional wave in the crust; ρ is the density of geomaterial in the crust; A is a dimensionless empirical scaling factor; ε is a dimensionless deformation (xx is the tensor component); w is a dimensionless rate of asperities; σ is the xx stress tensor component; U is a dimensionless constant velocity (in с units); k is the wave number (in A/b units); m is the modulus of the elliptic function; and cn(ξ, m) and dn(ξ, m) denote the elliptic functions.
The solution of the sine-Gordon Eq. (16) in the shape of slow cnoidal waves was first applied for mathematical modeling of the lithospheric plate motion. It follows from the solutions of the mathematical model that the propagation velocity of stress waves is almost exponential function of the dislocation density (or stress). The velocity value of waves varies from several kilometers per second during an earthquake to 10 km/day and 10–100 km/year during the postseismic and interseismic stages of the seismic cycle.
The most meaningful implication of the model is that it predicts the existence of tectonic waves propagating at a velocity of the order of 30 km/year, that is, ranging between the rate of the lithospheric plate displacement and seismic wave velocity.
The computations show that strain wave velocity after an earthquake is inversely proportional to time. A number of aftershocks decrease with time according to the same dependence (the Omori’s law). Hence, it follows physical interpretation of the fundamental empirical Omori’s law: aftershocks are called strain waves generated by earthquakes.
Based on the classical sine-Gordon Eq. (15), Gershenzon et al. (2011) have shown that some features of plate dynamics, such as the scaling law for slow slip events (SSE), periodicity of ETS, and migration pattern of tremors, can be really described by the Frenkel-Kontorova model. The analytical solutions obtained from this equation are appropriate for one or a few interacting pulses as well as a sequence of many pulses, allowing a unified analytical treatment of various seismic events, such as regular earthquakes, ETS, and creep. The periodicity interval should depend on the average slip rate in the area considered and its seismic history.
4 The perturbed sine-Gordon equation in models of fault dynamics and strain waves
In this section, the perturbed sine-Gordon equation for the case of crustal fault is suggested. It has been shown that simple heuristic models and analytical and numerical computations suggest that an entire class of commonly invoked models of earthquake failure processes can explain triggering of seismicity by transients, such as stress changes associated with solitary strain waves in crustal faults. A detailed description of the models and the results of computations can be found in publications (Bykov 2001a, 2001b, 2006, 2008).
Here, various versions of the perturbed sine-Gordon equation will be used with the appropriate solutions aimed to investigate the possibilities of its application for simulating fault dynamics and strain waves in different regimes and under different conditions. There have been considered precise analytical (Subsection 3.1) and numerical (Subsection 3.2) solutions of the perturbed sine-Gordon equation.
4.1 Solitary waves in a crustal fault
The model that demonstrates a change in the sliding regime on a fault and strain wave generation and is compatible with the perturbed sine-Gordon equation is proposed by Bykov (2001a). Interaction of the fault surfaces takes place due to friction at relative displacement, which is simulated by the introduction of the effective viscosity of gouge in the fault zone. Assumptions on periodic arrangement of roughness grains on the fault, the lack of asperity in the fault, and the proportionality of the friction force to the square of the shear flow rate of the interlayer matter allowed obtaining precise analytical solutions of the perturbed sine-Gordon equation in the shape of slow cnoidal and solitary waves.
The sliding regime change is “governed” by the friction parameter, which depends on the geometric sizes of the roughness grains (the radius, the diameter of the circular contact, and the distance between grain centers), the viscosity, and the thickness of the intergranular interlayer. Proportionality of the friction force F r to the square of the rate ∂U/∂η of the shear flow of the interlayer matter is physically and mathematically validated in Bykov (2001a).
Under the above assumptions, and with the dimensionless tectonic force σ = F tect /mg introduced as the source of energy (tectonic force, acting on the weight unit of roughness grain), the mathematical model is compliant with the perturbed sine-Gordon equation (Bykov 2001a):
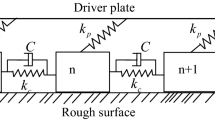
where u is the displacement of the blocks located periodically along the fault length; а is the distance between the block centers; D t is the tangential contact stiffness; m is the mass of the block; h is the distance between the block centers of the adjacent block layers; g is the gravity acceleration; μ is the viscosity of the layer between the blocks; d is the diameter of the circular contact of the blocks; δ is the layer thickness; ρ is the density of the block material; α 0 is the parameter of friction; and σ(η) is the function which reflects the external loading at the contact of fault surfaces.
Equation (17) matches the structure of the equation of single fluxion dynamics in Josephson junction transmission line with dissipation and the energy source (Parmentier 1978). The solutions of Eq. (17) in the shape of a traveling wave U = U(τ) = U(ξ − βη) (β = (n 2 − 1)1/2/n is the dimensionless velocity; n > 1 is the separation constant) are the functions (Bykov 2001a):
where cn(τ, k) and dn(τ, k) are the Jacobian elliptic functions, and k is the modulus of the elliptic function.
Solution (19) is in the shape of slow cnoidal waves, i.e., a periodic succession of pulses with 2k(1 − β 2)1/2 K(k) as a spatial period. Here, K(k) is the complete elliptic integral of the first kind. It follows that model (17) simulates the situation when, irrespective of the type of the energy source σ (constant tectonic loading or external effect), the fault geomedium forms a sequence of single pulses with a spatial period determined by fault-zone rheological properties. This may lead to periodic slip on a crustal fault that causes earthquakes.
At σ → σ 0, the modulus of the elliptic function k → 1 and it arises the limiting nonlinear case, when periodic waves (18) turn into traveling solitary waves:
Assuming that the arbitrary constant τ 0 = 0 and going over to the parameters of initial Eq. (17), let us write Eq. (20) and its variable v(x, t) = ∂u/∂t in the form
The profile of velocity v(x, t) of oscillation of particles at the fault surface has the shape of a soliton (22), moving on the fault at velocity V α (23). At the lack of friction (α 0 = 0), the solution of Eq. (17) coincides with the solution of the classical sine-Gordon equation.
The main results of the computations using model (17) are reduced to the following. The slip velocity (22) depends on the friction parameter (that is more natural under constant loading), but not conversely, as it is usually assumed in stick-slip models. The friction parameter α 0 “governs” the sliding regime change: at α 0 → 0, the velocity and amplitude of the soliton v(x, t) sharply increase. On the one hand, the value of velocity v is dependent on the state of the contact, parameter α 0. On the other hand, an increase of v should contribute to weakening of the contact itself. This is consistent with the nonlinear character of the deformation process.
It follows from the computations performed by (22) at the characteristic physical parameters that if the value V α is small, then v is insufficient and stable sliding without notable contact weakening (creep regime) is observed. At relatively large velocities V α of the order of 102 − 103 m/s, we obtain v ∼ 0.1–1 m/s and a sharp increase of displacement u(x, t) to 0.1 − 1 m, which does not contradict the dynamic parameters of earthquakes. The calculated solitary wave velocities V α during stable sliding are close to the strain wave velocities of the order of 10 − 100 km/year.
The solitary wave is weakening the contact, which, at the constant loading, leads to the displacement of the fault surfaces—dynamic slip. Thus, the sliding regime in the crustal fault is determined by the solitary wave velocity V α . Originally, the described solitary waves are similar to the slippage waves, observed at the contact of blocks of rocks prior to their relative displacement (Bykov 2008).
4.2 Waves of activation of crustal faults
It has been illustrated by Bykov (2000, 2006) that the perturbed sine-Gordon equation can be applied for modeling the peculiarities of fault dynamics. In fact, the contribution of perturbation to the sine-Gordon equation in the form of friction and inhomogeneities leads to the solutions in the shape of solitary-like waves that can be interpreted as the waves of fault activation. The perturbed sine-Gordon equation is used for modeling seismic process starting from fault activation with further generation of strain waves due to seismic slips which are considered to be the trigger of earthquakes.
The model includes two most important mechanisms providing interaction of the fault surfaces: friction, simulated by the introduction of gouge viscosity in the fault, and geometric inhomogeneities which are characterized by the ratio of scales of asperity and the sinusoidal parts of the internal fault surfaces and external load. The resulting model is formally equivalent to the following equation:
where u is the displacement of the blocks located periodically along the fault length; a is the distance between the block centers; D t is the tangential contact stiffness; m is the mass of the block; h is the distance between the block centers of the adjacent block layers; g is the gravity acceleration; μ is the viscosity of the layer between the blocks; d is the diameter of the circular contact of the blocks; Δ is the layer thickness; ρ is the density of the block material; α and γ are the parameters of friction and inhomogeneity, respectively; H, L are the height of asperities and the distance between them normalized to ap/π; and δ(ξ) is the Dirac delta function and σ(η) is the function which reflects the external load at the contact of the fault surfaces.
The left-hand side of the perturbed sine-Gordon Eq. (24) corresponds to the wave operator applied to the relative displacement of the fault surfaces. In the right-hand side of Eq. (24), the first term characterizes the restoring force originating due to shear along the sinusoidal-homogeneous surfaces of the fault; the second term is the friction force proportional to the velocity relative to displacement; the third term corresponds to corrections for inhomogeneities distributed at a distance apL/π; and the fourth term describes the initiation of external load on the fault.
Computation has been carried out with variation of the parameters of friction α and inhomogeneity γ, characterizing the state of the contact at the fault, and also the value of σ(η), which determines the external load. Integration of Eq. (24) has been made by the McLaughlin-Scott approximation method (McLaughlin and Scott 1978; Solerno et al. 1983), and numerical computation has been performed by the Runge-Kutta-Felberg scheme (Forsythe et al. 1977).
The main results of the investigations using model (24) are reduced to the following. The profile of velocity v of the particles on the fault surfaces has the shape of a soliton v(x, t) = vmaxsech(x − V α t), moving along the fault at velocity V α . Variation of the friction parameter α in the sine-Gordon equation essentially clarifies the reasons for variations of velocity V α of the solitary wave in the crustal fault, as well as the consequences related to this variation. It follows from the computations that in the case of low V α , the value of v is insignificant, and stable sliding (creep) occurs. For the relatively high values of velocity V α (of the order of 1–10 m/s), we obtain the soliton profile v ∼ 0.1–1 m/s and the stepwise profile (kink) u(x, t). The slip velocity increases sharply for the wave velocity V α of 1 m/s and higher, and the values of displacement u are compatible with the displacements of the fault surfaces that are observed for earthquakes.
At definite values of the friction and inhomogeneity parameters, α and γ, the solitary wave “acquires” the stationary regime with the values of V α ∼ 10− 4–10− 1 m/s (from 3 km/year to 10 km/day) that correspond to the velocities of strain waves. These waves, migrating along the fault, may trigger the subsequent seismic events.
Evolution of velocity V α of the wave of fault activation depends on the friction parameter α. This parameter has a periodically changing component α 1 that corresponds to the regime of the cyclic perturbation contribution to some segments of the fault. Then, the parameter α in Eq. (24) is transformed into α = α 0 + α 1 sin(τ/η), where α 0, α 1, and η are some constants. The results of computation of Eq. (24) at σ(τ) = 0, η = 102 for varying α 0, α 1, γ show that the maximum of velocity V α is attained at t = 2 − 8 s from the perturbation moment, the time interval, within which V α corresponds to a slip of 1–5 s. In fact, in real faults, the sliding time is a value of the order of seconds at large earthquakes. At higher values of α 0 and α 1, V α acquires the periodic regime with the velocities close to those of quick strain waves reaching 1 − 10 km/day.
Periodic changes in the friction parameter in the perturbed sine-Gordon equation, which models, for example, weakening of the fault due to cyclic fluid flow, lead to the periodic generation of waves with the velocities characteristic of the observed strain waves.
We will simulate the initiation of the external loading on the fault by including in Eq. (24) of another periodic function σ(τ) = σ 0 sin(Ωτ), where σ 0 and Ω are the dimensionless amplitude and frequency of the external load, the friction parameter α being constant.
The computations show that the time delay of the initiated dynamic slip decreases with an increase in the amplitude of the external load. This agrees well with laboratory (Savage and Marone 2007; Johnson et al. 2008) and field (Ruzhich et al. 1999) experiments. The slip velocities depend weakly on the amplitude σ 0 of the external load. The number of slips is proportional to the amplitude of the load and increases with increasing frequency of the constant sinusoidal load, whereas the time interval between the successive slips decreases. This also coincides with experiments (Ruzhich et al. 1999; Savage and Marone 2007; Johnson et al. 2008).
The perturbed sine-Gordon Eq. (24) is, probably, the simplest mathematical scheme which allows for all the leading factors (friction, asperity) governing unstable sliding along a fault during any time interval. This equation contains no other values but only those capable of being experimentally measured. Applying the perturbed sine-Gordon equation to reproduce the observed stick-slip effects at the contact of blocks of rocks affirms its efficacy (Bykov 2001b, 2008).
5 Concluding remarks
The paper aimed to provide a consistent overview of remarkable progress in theoretical studies of the solitary strain waves that have contributed greatly, first of all, to the solution of the fundamental problem of strain waves in the Earth.
The search for causes of exciting strain waves resulted in the development of the models, compliant with the sine-Gordon equation, which allowed the sources of their excitement to be indicated, the mechanisms generating the waves of earthquake migration to be proposed, and the superlow velocities of strain waves to be obtained. The sine-Gordon equation for the block medium was first performed by Nikolaevskii (1995) using the elements of the Cosserat mechanics (possible to be accounted for the viscoelasticity and elastoplasticity effects). This provided the possibility to explain slow stress redistribution in the crust due to strain waves (individual kink or solitary waves), moving at velocities a great number of orders less than those of the ordinary seismic waves. It happens because the inertial movements are not coincident with a mean direction.
The detected mechanisms of strain wave exciting are caused by the block and microplate rotation, relative block displacement in crustal fault zones, transform faults, zones of the lithospheric plate collision and subduction, and irregularity of the Earth’s rotation (Bykov 2005). Probably, refinement of these models should be reduced to the search for the effects capable of being detected in laboratory and in situ experiments and in the geophysical fields.
The theoretical advancements, covered in this overview, may be successfully applied in the new rapidly growing discipline of geophysics, rotational seismology, for the explanation of the observed effects (Teisseyre et al. 2006; Teisseyre 2009). Conversely, it is necessary to use the results of rotational seismology for the analysis of adequacy of the models developed (see, for example, Lee et al. 2009).
The second problem successfully developed using the sine-Gordon equation is related to the study of tectonic activity of the new type—“slow earthquakes.” The ETS events, accompanying slow earthquakes, were observed in a number of the Pacific subduction zones, the San-Andreas fault, and other natural systems (landslides and glaciers) (Schwartz and Rokosky 2007). They are remarkably regular in different subduction zones, and their recurrence interval ranges from 3 to 18 months (Rogers and Dragert 2003). In the paper by Gershenzon et al. (2011), ETS periodicity and the rate of tremor migration in Cascadia are reproduced. Episodic tremor and slow slip, developing at plate boundaries in subduction zones and transform fault zones, may be new evidence and indication of strain wave migration in the Earth.
Despite the great advance in the theoretical studies, still a great number of problems remain to be further developed and analyzed. The mechanisms of strain wave generation, described in the present overview, have not been sufficiently elaborated and mainly involve the empirical data; a lot of predictions still expect experimental validation.
Further mathematical modeling of strain waves in the Earth using the sine-Gordon equation is necessary to determine the optimal conditions for their observation, to detect the main physical mechanisms causing seismic migration and generation of signals of different origin, accompanying strain waves at different scale levels, and, also, to determine the conditions, mostly influencing the parameters of these waves.
References
Aero EL, Bulygin AN, Pavlov YV (2009) Solutions of the three-dimensional sine-Gordon equation. Theor Math Phys 158:313–319
Barabanov VL, Grinevsky AO, Kissin IG, Mil’kis MP (1988) Hydrogeological and seismic effects of deformational waves in the foremost Kopet Dag Fault zone. Izv Akad Nauk SSSR Fiz Zemli 5:21–31
Bazavluk TA, Yudakhin FN (1993) Deformation waves in Earth crust of Tien Shan on seismological data. Dokl Akad Nauk 329:565–570
Bazavluk TA, Yudakhin FN (1998) Variations in time converted waves producing inhomogeneities in the Tien-Shan earth crust. Dokl Akad Nauk 362:111–113
Braun OM, Kivshar YS (1998) Nonlinear dynamics of the Frenkel-Kontorova model. Phys Rep 306:1–108
Braun OM, Kivshar YS (2004) The Frenkel-Kontorova model: concepts, methods, and applications. Springer, Berlin
Bykov VG (2000) Nonlinear wave processes in geological media. Dal’nauka, Vladivostok (in Russian)
Bykov VG (2001a) Solitary waves on a crustal fault. Volcanol Seismol 22:651–661
Bykov VG (2001b) A model of unsteady-state slip motion on a fault in a rock sample. Izv Phys Solid Earth 37:484–488
Bykov VG (2005) Strain waves in the Earth: theory, field data, and models. Russ Geol Geophys 46:1158–1170
Bykov VG (2006) Solitary waves in crustal faults and their application to earthquakes. In: Teisseyre R, Takeo M, Majewski E (eds) Earthquake source asymmetry, structural media and rotation effects. Springer, Berlin, pp 241–253
Bykov VG (2008) Stick–slip and strain waves in the physics of earthquake rupture: experiments and models. Acta Geophys 56:270–285
Di Bartolomeo M, Massi F, Baillet L, Culla A, Fregolent A, Berthier Y (2012) Wave and rupture propagation at frictional bimaterial sliding interfaces: from local to global dynamics, from stick-slip to continuous sliding. Tribol Int 52:117–131
Dodd RK, Eilbeck JC, Gibbon JD, Morris HC (1982) Solitons and nonlinear wave equations. Academic, London
Eringen A (1968) Theory of micropolar elasticity. In: Liebowitz H (ed) Fracture, vol 2. Academic, New York, pp 621–729
Forsythe GE, Malcolm MA, Moler CB (1977) Computer methods for mathematical computations. Prentice Hall, Englewood Cliffs, New York
Frenkel IY, Kontorova TA (1938) On the theory of plastic deformation and twinning. J Exp Theor Phys 8:89–95 (in Russian)
Garagash IA (1996) Microdeformation of the prestress discrete geophysical media. Dokl Akad Nauk 347:95–98
Garagash IA, Nikolaevskiy VN (2009) Cosserat mechanics in Earth Sciences. Comput Contin Mech 2:44–66 (in Russian)
Gershenzon NI, Bykov VG, Bambakidis G (2009) Strain waves, earthquakes, slow earthquakes, and afterslip in the framework of the Frenkel-Kontorova model. Phys Rev E 79:056601
Gershenzon NI, Bambakidis G, Hauser E, Ghosh A, Greager KC (2011) Episodic tremors and slip in Cascadia in the framework of the Frenkel-Kontorova model. Geophys Res Lett 38, L01309
Johnson PA, Savage H, Knuth M, Gomberg J, Marone C (2008) Effects of acoustic waves on stick-slip in granular media and implications for earthquakes. Nature 451:57–60
Kato A, Obara K, Igarashi T, Tsuruoka H, Nakagawa S, Hirata N (2012) Propagation of slow slip leading up to the 2011 Mw 9.0 Tohoku-Oki Earthquake. Science 335:705–708
Kivshar YS, Malomed BA (1989) Dynamics of solitons in nearly integrable systems. Rev Mod Phys 61:763–911
Kuz’min YO (2012) Deformation autowaves in fault zones. Izv Phys Solid Earth 48:1–16
Lamb GL (1980) Elements of soliton theory. Wiley, New York
Lee WHK, Celebi M, Todorovska MI, Igel H (eds) (2009) Bulletin of the Seismological Society of America, Special Issue: “Supplement. Rotational seismology and engineering applications” 99: 1486 p
Lukk AA, Nersesov IL (1982) Time-dependent parameters of a seismotectonic process. Izv Akad Nauk SSSR Fiz Zemli 3:10–27
Majewski E (2006) Seismic rotation waves: spin and twist solitons. In: Teisseyre R, Takeo M, Majewski E (eds) Earthquake source asymmetry, structural media and rotation effects. Springer, Berlin, pp 255–272
Malamud AS, Nikolaevskii VN (1983) The periodicity of Pamirs-Hindu Kush earthquakes and the tectonic waves in subducted lithosphere plates. Dokl Akad Nauk SSSR 269:1075–1078
Malamud AS, Nikolaevsky VN (1985) Cyclicity of seismotectonic events in the marginal region of the Indian lithospheric plate. Dokl Akad Nauk SSSR 282:1333–1337
McLaughlin D, Scott A (1978) A multisoliton perturbation theory. In: Lonngren K, Scott A (eds) Solitons in action. Academic, New York, pp 201–256
Mikhailov DN, Nikolaevskiy VN (2000) Tectonic waves of the rotational type generating seismic signals. Izv Phys Solid Earth 36:895–902
Nevsky MV, Morozova LA, Zhurba MN (1987) The effect of propagation of the long-period strain perturbations. Dokl Akad Nauk SSSR 296:1090–1093
Nikolaevskii VN (1995) Mathematical modeling of solitary deformation and seismic waves. Dokl Akad Nauk 341:403–405
Nikolaevskiy VN (1996) Geomechanics and fluidodynamics. Kluwer, Dordrecht
Nikolaevskiy VN (1998) Tectonic stress migration as nonlinear wave process along earth crust faults. In: Adachi T, Oka F, Yashima A (eds). Proc. of 4th Inter. Workshop on Localization and Bifurcation Theory for Soils and Rocks, Gifu, Japan, 28 Sept.- 2 Oct. 1997. Balkema, Rotterdam 137–142
Parmentier RD (1978) Fluxions in long Josephson junctions. In: Lonngren K, Scott A (eds) Solitons in action. Academic, New York, pp 173–199
Power WL, Tullis TE (1991) Euclidean and fractal models for the description of rock surface roughness. J Geophys Res 96:415–424
Rogers G, Dragert H (2003) Episodic tremor and slip on the Cascadia subduction zone: the chatter of silent slip. Science 300:1942–1943
Ruzhich VV, Truskov VA, Chernykh EN, Smekalin OP (1999) Recent movements in the fault zones of Pribaikalia and mechanisms of their initiation. Geol Geofiz 40:360–372 (in Russian)
Savage HM, Marone C (2007) Effects of shear velocity oscillations on stick-slip behavior in laboratory experiments. J Geophys Res 112, B02301
Schwartz SY, Rokosky JM (2007) Slow slip events and seismic tremor at Circum-Pacific subduction zones. Rev Geophys 45, RG3004
Scott A (2003) Nonlinear science: emergence and dynamics of coherent structures (second edition). Oxford University Press, New York
Solerno M, Soerensen MP, Skovgaard O, Christiansen PL (1983) Perturbation theories for sine-Gordon soliton dynamics. Wave Motion 5:49–58
Stein RS, Barka AA, Dieterich JH (1997) Progressive failure on the North Anatolian fault since 1939 by earthquake stress triggering. Geophys J Int 128:594–604
Takeo M (2009) Rotational motions observed during an earthquake swarm in April 1998 offshore Ito, Japan. Bull Seismol Soc Am 99:1457–1467
Teisseyre R (2009) Tutorial on new developments in the physics of rotational motions. Bull Seismol Soc Am 99:1028–1039
Teisseyre R, Takeo M, Majewski E (eds) (2006) Earthquake source asymmetry, structural media and rotation effects. Springer Verlag, Berlin
Vikulin AV (2008) Energy and moment of the Earth’s rotation elastic field. Russ Geol Geophys 49:422–429
Whitham GB (1974) Linear and nonlinear waves. Wiley, New York
Wu ZL, Chen YT (1998) Solitary wave in a Burridge-Knopoff model with slip-dependent friction as a clue to understanding the mechanism of the self-healing slip pulse in an earthquake rupture process. Nonlinear Processes in Geophysics 5:121–125
Wu C-F, Lee WHK, Huang H-C (2009) Array deployment to observe rotational and translational ground motions along the Meishan Fault, Taiwan: a progress report. Bull Seismol Soc Am 99:1468–1474
Acknowledgments
The author wishes to thank the reviewers and editors for appraising the submitted manuscript with a critical eye. Their very constructive comments, recommendations, and suggestions contributed to a complete modification of the manuscript. The author acknowledges with great thanks to the very constructive comments and proposals made by Victor Nikolaevskiy which significantly improved the manuscript. Special thanks are due to Natalia Kovriga for improving the manuscript readability.
This work was supported by Program No. 4 of Basic Research of the Presidium of the Russian Academy of Sciences (RAS), under Grant of the Far Eastern Branch of the RAS 12-I-P4-07, and the Russian Foundation for Basic Research (RFBR) and the Japan Society for the Promotion of Science (JSPS), under Grant 13-05-92101 JR_а.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
Here, only those analytical solutions of the sine-Gordon equation are given that have been used by different researchers for developing models of seismic activation of faults, demonstrate the main features of the deformation process in fault zones and explore a relative role of different factors in wave dynamics of the earthquake source.
The classical sine-Gordon equation has the following form:
where ξ and η are the spatial and temporal coordinates; U is the dynamic variable (the rotation angle or displacement of the block or fragment of the medium). If to search for the solution in the shape of a traveling wave (β is the wave velocity),
Equation (25) turns into
Equation (26) has the following well-known solutions:
-
1.
Periodic fast cnoidal waves (0 < k < 1; β 2 > 1):
Solution (27) appears as a traveling wave oscillating close to the value U = 0. Solution (28) corresponds to a periodic wave with an average zero value. V is the velocity of dynamic variable U (the rotation angle or displacement of the block of the geological medium).
-
2.
Periodic slow cnoidal waves (0 < k < 1; β 2 < 1):
Solution (30) represents a periodic sequence of pulses with a spatial period 2k(1 − β 2)1/2 K(k), where K(k) is the complete elliptical integral of the first kind. In expressions (27)–(30), the notations sn(ξ, k), cn(ξ, k), and dn(ξ, k) are the Jacobian elliptic functions; k is the modulus of the elliptic function.
-
3.
Solitary waves (solitons) (\( \begin{array}{cc}\hfill k\to 1;\hfill & \hfill {\beta}^2<1\hfill \end{array} \)):
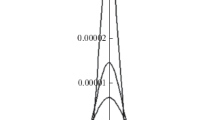
Solutions (31) and (32) are most frequently encountered in the present overview and have the proper names: the first one is a kink, a wave with invariant profile in the shape of a twist by variable U; the second one is a soliton, a solitary wave, transmitting at velocity β. The above solutions are schematically shown in Fig. 3. Figure 3b, c, corresponding to the solutions (31) and (32) of the sine-Gordon equation, coincides in their shapes with the displacements and velocities of stick-slip at the contact of blocks of rocks, observed in the laboratory experiments (Bykov 2008).

Profiles of velocities V and displacements U of particles in waves. a “Fast” (1) and “slow” (2) cnoidal waves. b Solitary waves. c Displacements U of particles (kink)
Rights and permissions
About this article
Cite this article
Bykov, V.G. Sine-Gordon equation and its application to tectonic stress transfer. J Seismol 18, 497–510 (2014). https://doi.org/10.1007/s10950-014-9422-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10950-014-9422-7