
Abstract
Sustained oscillation is frequently observed in population dynamics of biospecies. The oscillation comes not only from deterministic but also from stochastic characteristics. In the present article, we deal with a finite size lattice which contains prey and predator. The interaction between a pair of lattice points is carried out by two different methods; local and global interactions. In the former, interaction occurs between adjacent sites, while in the latter interaction takes place between any pair of lattice sites. It is found that both systems exhibit undamped oscillations. The amplitude of oscillation decreases with the increase of the total lattice sites. In the case of global interaction, we can present a stochastic differential equation which is composed of two factors, i.e., the Lotka–Volterra equation with density dependence and noise term. The quantitative agreement between theory and simulation results of global interaction is almost perfect. The stochastic theory qualitatively expresses characteristics of sustainable oscillation for local interaction.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Undamped oscillations are frequently observed in population dynamics of biospecies. Some oscillations may be explained by deterministic equations (May 1973; Hofbauer and Sigmund 1998). The well-known Lotka–Volterra model, which is the simplest model of predator and prey, exhibits a periodic oscillation. However, this oscillation is not stable; species cannot survive under environmental fluctuations. In the deterministic equations, the emergency of sustained oscillation is rarely known; an example is a limit cycle attractor. In contrast, a majority of oscillations may come from stochastic processes. The concept of stochastic oscillation was first proposed by Nisbet and Gurney (1976). Later, many stochastic models have been presented to exhibit undamped oscillations (Nisbet and Gurney 1982). The stochastic oscillation is sometimes called “sustained oscillation” (Aparicio and Solari 2001; Rosa et al. 2003), “stochastic” limit cycle (Itoh and Tainaka 1994) or “quasicycle” (Pascual and Mazzega 2003). The stochastic approaches have growing interest in relation to the progress of understandings of nonlinearity and noise. The aim of the present paper is to demonstrate sustainable oscillations by the use of the finite size of the lattice. The stochastic property comes from the finiteness of the lattice size.
Lattice models are widely applied in the field of ecology (Tainaka 1988; Matsuda et al. 1992; Nowak et al. 1994; Harada and Iwasa 1994; Durrett and Levin 1998; Nakagiri et al. 2001; Itoh et al. 2004). Spatial distribution of individuals usually differs from random distribution. In most cases, individuals of a single species form some clumping patterns; they huddle together. Nonrandomness in spatial distribution not only influences population dynamics, but also evolutionary consequences. Very little literature on the lattice model, however, has discussed the stochastic oscillations that originated in the finiteness of lattice size (Itoh and Tainaka 1994).
In the present paper, we apply a prey–predator model introduced by coworkers in our laboratory (Tainaka and Fukazawa 1992); hereafter we call it the “TF model.” Various types of prey–predator system have been presented by many authors, covering several fields such as physics (Lipowski and Lipowska 2002; Droz and Pekalski 2001; Rozenfeld and Albano 2001) and ecology (Pacheco et al. 1997; Hance and Van Impe 1999). The TF model is very simple, but it exhibits various characteristics of both prey and predator. For example, spatial distributions in the stationary state show that the prey distributes contagiously, but the predator disperses widely. Moreover, the TF model demonstrates the paradox of enrichment (insecticide): even if the reproduction (mortality) rate of a species is increased, the equilibrium density of the species does not always increase or decrease (Tainaka 1994). So far, in this model, however, an infinitely large size for the lattice was assumed. In contrast, the work presented here deals with a finite lattice size, and we present a linear theory of stochastic differential equations to discuss stochastic behaviors.
In the next section, we explain the prey–predator stochastic model on a square lattice (TF model). Two types of simulation method are explained; namely local and global interactions. In the former case, interaction occurs between the adjacent lattice sites, while in the latter case interaction can take place between any pair of lattice sites. In the Simulation results section, simulation results of both local and global methods are reported. In the Stochastic theory for MFS section, we present a stochastic differential equation to explain the results of local interaction. It is found that the theoretical predictions precisely (quantitatively) agree with the simulation results of global interaction. Moreover, the stochastic theory is found to be useful for the qualitative prediction of local interaction. The final section is devoted to the discussions. In particular, the stochastic theory predicts that the phase-sift between the oscillations of prey and predator is largely changed by the change of parameter values. Recently, Turchin (2003) has demonstrated in the laboratory experiment that the phase-shift between prey and predator oscillations drastically changed depending on environmental conditions.
Model and methods
Model
We deal with a model ecosystem (TF model) which contains two species; namely, prey (X) and predator (Y). Each lattice site is labeled as X, Y or O, where O is a vacant site (Fig. 1). Interactions are defined by
The process (1a) denotes the predation of Y; the species X is beaten by Y. The reaction (1b) simulates reproduction of X; prey X can reproduce in the vacant site. The last process represents the death of Y. Hence, the parameter r means the reproduction rate of prey, and m is the mortality rate of Y.

Schematic illustration of lattice sites. Each lattice site is labeled by X, Y or O, where X and Y mean the sites occupied by prey and predator, respectively, and O is an empty patch. Simulation is carried out by global and local interactions. In the former case, interaction occurs between any pair of lattice sites; we choose the pair randomly and independently. In contrast, in the latter case, we randomly select two neighboring sites; if the lattice site located at the center in this figure is selected first, then, next, we specify one of four adjacent sites (dark sites)
Methods
We have applied two simulation methods: one is a lattice model and the other is mean-field simulation (MFS). In the former case, interaction is restricted between neighboring lattice sites (“local interaction”), while in the latter case, interaction is allowed between any pair of lattice sites (“global interaction”). First, we describe the simulation method for the local interaction:
-
1.
Initially, we distribute species on a square lattice; each lattice site is either empty (O) or occupied by prey (X) or predator (Y). Initial spatial distribution is not so important because the system reaches a specific state (sustainable oscillation) irrespective of initial distributions.
-
2.
The reactions (1a) and (1b) are performed in the following two steps:
-
(i)
First, we perform the two-body reactions (1a) and (1b): choose one lattice site randomly, and then specify one of four adjacent sites. Let the pair react according to (1a) and (1b). For example, if these sites are X and O, then the latter site is changed into the former one by the rate r. (We employ the periodic boundary condition.)
-
(ii)
We perform the single-body reaction (1c). Choose one lattice point randomly; if the site is occupied by Y, that site will become O by a probability (rate) m.
-
(i)
-
3.
Repeat step 2 by N times, where N is the total number of lattice points. This is called the Monte Carlo step (Tainaka 1988).
-
4.
Repeat step 3 until the effect of the initial condition disappears.
In our lattice model, each individual in a lattice site is assumed not to be moving; this assumption holds for plants, and it is approximately applicable even for animals, provided that the radius of action of an individual is much shorter than the size of the entire system.
Next, we describe the method of global interaction. This method is called MFS (Itoh et al. 2004). Almost all procedures of local interaction are not changed in MFS, however, the MFS algorithm for two-body reactions is changed as follows: two lattice sites are randomly and independently chosen. In the case of MFS, the interaction can take place between any pair of lattice sites.
Simulation results
The population dynamics of both local and global interactions have been reported by several authors (Hofbauer and Sigmund 1998; Tainaka 1994; Satulovsky and Tome 1994; Sutherland and Jacobs 1994; Nakagiri et al. 2001) regarding cases where the total lattice sites N is infinitely large. In the case of global interaction, the dynamics is represented by the Lotka–Volterra equation with density dependence. Namely, the population asymptotically evolves into a fixed value. Figure 2 illustrates the population dynamics for global interaction, where the horizontal and vertical axes denote the densities of prey (x=X/N) and predator (y=Y/N), respectively. Similar results are obtained for the local interaction. So long as both prey and predator survive, their spatial distribution dynamically varies; predators run after prey (Fig. 3). For example, we determine r=1 and change the value of parameter m. Then, the final states exhibit two types of extinction as follows: (1) when the mortality rate m of predator is higher than a critical value (my), the predator goes extinct; (2) in contrast, when m decreases and approaches mx, the prey density becomes zero. The critical values take mx~0 and my~0.46 for the lattice model (local interaction) and mx=0 and my=1 for the global interaction (mean-field theory). Concerning m→0, the predator survives in regards to the mean-field theory, whereas the survival of predator is still unknown regarding the lattice model (Satulovsky and Tome 1994).

A typical example of population dynamics for global interaction. The parameter values are r=1, m=0.2. Since the total of lattice sites is very large (N=500×500), the system evolves into an equilibrium. Oscillation or fluctuation is hardly observed

Typical stationary patterns for local interaction (TF model). We set r=1. a The mortality rate of the predator takes a small value (m=0.02), so that the prey (yellow) is endangered. b Since the mortality rate takes a large value (m=0.44), the predator (red) becomes endangered. In both cases of (a) and (b), the densities of endangered species are equal (3%). Nevertheless, spatial patterns are entirely different: in (a) prey forms a contagious pattern, while in (b) predator distributes dispersedly
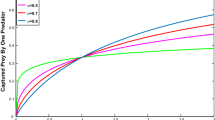
When the total sites (N) is finite, a kind of oscillation emerges. First, we report the simulation results for the lattice model. In Fig. 4, the population dynamics in the stationary state are depicted for various values of N. In each figure, the orbits are displayed during the period 500<t<1,000. To make the oscillation clear, we obtained power spectra (Fig. 5). It was found that the power spectra have a similar peak at a specific frequency. This “characteristic frequency” depends on the value of m, but it is almost unchanged, irrespective of the size of the lattice. These results suggest that the dynamics of prey and predator is given by a periodic oscillation with noise. Figure 6 displays the average of the amplitude of the orbit; the vertical axis means the time-average of square amplitude (AS), and the horizontal axis denotes the total sites N (log–log plot). The square amplitude is defined by
where x and y are the densities of prey and predator, respectively, and the brackets < > mean the long-term average in stationary state. The center of oscillation is assumed to be located at the average densities <x > and <y>. We find from Fig. 6 that the amplitude of oscillation decreases with the increase of the lattice size:
With the decrease of lattice size N, the amplitude of oscillation becomes large, so that extinction of species easily occurs.

Same as Fig. 2, but the values of lattice size N are finite. In these cases, stochastic oscillations can be observed

Power spectra of prey density for the same parameter as those shown in Fig. 4. The lattice size N increases from top to bottom. The vertical and horizontal axes denote power and frequency, respectively. The frequency at the peak is called characteristic frequency

The time-average of square amplitude A S is plotted against the total sites N (log–log plot). The square amplitude of oscillation is inversely proportional to the lattice size N
Next, we report simulation results for global interaction (MFS). The results of MFS are qualitatively unchanged compared to the local interaction (lattice model); Figs. 4, 5, 6 are almost unchanged regarding the MFS. The relation expressed by Eq. (2) is also valid for MFS. However, in the case of MFS, the characteristic frequency become slightly large compared to the lattice model.
Stochastic theory for MFS
Stochastic differential equation
If the global interaction is allowed between any pair of lattice sites (MFS), and if the total sites (N) is infinitely large, the population dynamics of our system as expressed by Eq. (2) is given by the mean-field theory:
where x and y are the densities of the sites X and Y, respectively. The first and second terms on the right hand side of Eq. (3a) come from the reaction expressed by Eqs. (1a) and (1b), respectively. The factor (1−x−y) means the density of the empty site. Similarly, the first and second terms of Eq. 3b originate in the reaction as expressed by Eqs. (1c) and (1a), respectively. Equations (3a) and (3b) are equivalent to the Lotka–Volterra model with density dependence, so that the dynamics asymptotically approaches an equilibrium as shown in Fig. 2. When m<1, the equilibrium densities (x* and y*) are given by
When the lattice size is finite, we must add a stochastic property to Eqs. (3a) and (3b). In order to explain population cycles, we introduce a stochastic differential equation (Langevin equation). Our model consists of three independent stochastic events. The transition rates of the events expressed by Eqs. 1a, 1b and 1c are given, respectively, as
For each event, the population sizes of X and Y increase (or decrease) by unity. In other words, the changes of the densities x and y are 1/N at each step. The average changes of the densities x and y at each time step are thus given as
Moreover, the variances of Δx and Δy are
Hereafter we assume that the total lattice points N is relatively large (N>>1). Disregarding terms of higher orders (smaller terms) than \(1/{\sqrt N}\), we obtain a stochastic differential equation as follows:
Here f x and f y are white Gaussian noise; their average is zero
and their correlations are given by
Note that this stochastic differential equation should be interpreted in Ito sense. Without the noise terms f x and f y , we recover the Lotka–Volterra Eqs. 3a and 3b.
Linear theory
It is not easy to solve the stochastic differential Eq. (8). However, when the total lattice points N is relatively large (1<<N), we can solve Eq. (8). We assume that the densities x and y are very close to the equilibrium densities x* and y*, respectively. The deviations from equilibrium are defined by
where x* and y* are defined by Eq. (4). By the linearization around the equilibrium, Eq. (8) becomes
Here A is the Jacobian matrix of Eq. 8 at the equilibrium 4; i.e.,
The eigenvalues λ ± of the Jacobian matrix are
When r < 4(1 − m)/m, they are complex conjugate eigenvalues. Since the real parts of λ ± are negative for m<1, the equilibrium point is stable. Consequently, in N → ∞, the system converges at the equilibrium point. Since N is finite, the system cannot be the equilibrium point due to the stochastic terms. Assuming that the deviations u and v are sufficiently small, we ignore the effect of the stochastic terms on u and v. Thus, the correlations of the stochastic terms are rewritten as
where
The solution of Eq. (12) is given by the stochastic integral form as follows:
The above solution indicates that u and v obey two-dimensional normal distribution with an average of zero: <u(t)>=<v(t)>=0. In other words, the average densities are equal to the equilibrium densities: <x>=x* and <y>=y*.
We define correlation functions of u and v as follows: <u(t)u(t′)>, <u(t)v(t′)>, <v(t)u(t′)> and <v(t)v(t′)>. The first and last terms are called auto-correlations, while the middle two terms, which are equal with each other, are called cross-correlations. For t>t′, the correlation functions are calculated as follows:
Inserting t=t′ into the above equation, we have the square amplitude <A S > of the oscillation. Since <A S >=<u(t)2+v(t)2>, we have the relation as expressed by Eq. (2). It is therefore found that the square amplitude is inversely proportional to the system size N.
Next, we obtain the power spectra; they are given by the Fourier transform of the auto-correlations. After a simple calculation, we have
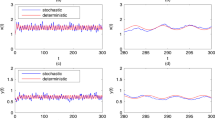
We compare the above results with the simulation results of MFS. In Fig. 7, both results are shown, where the right and left figures represent the power spectra of the prey and predator, respectively. We find from this figure that the linear theory agrees well with the numerical result. It should be noted that the frequency ω* at the peak of the power spectrum is not completely coincident with the imaginary part of the eigenvalues as expressed by Eq. 14.

Comparison of power spectra between theory and simulation. Global interaction (MFS) is applied for the simulation method. This is obtained from the time dependence of densities of prey. The red curve represents the numerical results, while the blue curve stands for the theoretical prediction. The parameter values are r=1, m=0.2 and N=900. Here, we average over 100 runs
Discussion and conclusion
We have explored sustainable oscillations in the prey–predator system with finite size. The interaction between a pair of lattice points is carried out by two different methods; local and global (MFS) interactions. If the total lattice sites N is infinitely large, the population dynamics obtained by both methods merely approach an equilibrium point. In contrast, when N becomes small, stable oscillations appear because of noise. The stochastic oscillations are confirmed by the power spectra. Moreover, in both simulation methods, the time-average of square amplitude <A S > is found to be inversely proportional to the system size N (Fig. 6). If N increases, the amplitude of the oscillation approaches to 0, but the shape of the power spectrum does not change. Thus the periodicity remains even when N is large.
In the case of global interaction (MFS), we can present a stochastic differential equation. In N→∞, the population dynamics is given by the Lotka–Volterra equation with density dependence. When N is finite, a noise term is added as presented by Eq. (8). The linear theory of this equation precisely expresses characteristics of stochastic oscillation. This theory is valid, when the lattice size is relatively large. We can quantitatively explain the power spectra by the linear theory of the stochastic differential equation. Our theory also accounts for the fact that the time-average of square amplitude <A S > is inversely proportional to the system size N. The agreement between theory and simulation of global interaction is almost complete. Moreover, the stochastic theory is found to be useful for the qualitative prediction of local interaction.
Furthermore, our stochastic theory can predict various features of oscillation. An example is the phase-shift between the oscillations of prey and predator. The phase shift ranges between π/2 and π. It increases with the increase of m. The density peak of the predator usually appears to follow that of the prey. Such behavior is seen for deterministic models like Lotka–Volterra model. On the other hand, when the phase shift approaches π, the oscillation of the prey and predator exhibits out-of-phase, where the density peak of the predator locates at the minimum density of the prey. Recently, such out-of-phase oscillation has been observed experimentally (Turchin 2003; Yoshida et al. 2003). Theoretical results described here will be submitted elsewhere.
References
Aparicio YP, Solari HG (2001) Sustained oscillations in stochastic systems. Math Biosci 169:15–25
Droz M, Pekalski A (2001) Coexistence in a predator–prey system. Phys Rev E 63:051909
Durrett R, Levin S (1998) Spatial aspect of interspecific competition. Theor Popul Biol 53:30–43
Hance Th, Van Impe G (1999) The influence of initial age structure on predator–prey interaction. Ecol Model 114:195–211
Harada Y, Iwasa Y (1994) Lattice population dynamics for plant with dispersing seeds and vegetative propagation. Res Popul Ecol 36:237–249
Hofbauer J, Sigmund K (1998) Evolutionary games and population dynamics. Cambridge University Press, Cambridge
Itoh Y, Tainaka K (1994) Stochastic limit cycle with power-law spectrum. Phys Lett A 189:37–42
Itoh Y, Tainaka K, Sakata T, Tao T, Nakagiri N (2004) Spatial enhancement of population uncertainty near the extinction threshold. Ecol Model 174:191–201
Lipowski A, Lipowska D (2002) Nonequilibrium phase transition in a prey–predator system. Physica A 276:456–464
Matsuda H, Ogita N, Sasaki A, Sato K (1992) Statistical mechanics of population: the lattice Lotka–Volterra model. Prog Theor Phys 88:1035–1049
May R (1973) Stability and complexity in model ecosystem. Princeton University Press, Princeton, NJ
Nakagiri N, Tainaka K, Tao T (2001) Indirect relation between species extinction and habitat destruction. Ecol Model 137:109–118
Nisbet RM, Gurney WSC (1976) A simple mechanism for population cycles. Nature 263:319–320
Nisbet RM, Gurney WSC (1982) Modeling fluctuating population. Wiley, New York
Nowak MA, Bonhoeffer S, May RM (1994) More spatial games. Int J Bifurcat Chaos 4:33–56
Pacheco JM, Rodriguez C, Fernandez I (1997) Hopf bifurcations in predator–prey systems with social predator behavior. Ecol Model 105:83–87
Pascual M, Mazzega P (2003) Quasicycles revisited: apparent sensitivity to initial conditions. Theor Popul Biol 64:385–395
Rosa R, Pugliese A, Villani A, Rizzoli A (2003) Individual-based vs. deterministic models for macroparasites: host cycles and extinction. Theor Popul Biol 63:295–307
Rozenfeld AF, Albano EV (2001) Critical and oscillatory behavior of a system of smart preys and predators. Phys Rev E 63:061907
Satulovsky JE, Tome T (1994) Stochastic lattice gas model for a predator–prey system. Phys Rev E 49:5073–5079
Sutherland BR, Jacobs AE (1994) Self-organization and scaling in a lattice prey–predator model. Complex Syst 8:385–405
Tainaka K (1988) Lattice model for the Lotka–Volterra system. J Phys Soc Jpn 57:2588–2590
Tainaka K (1994) Intrinsic uncertainty in ecological catastrophe. J Theor Biol 166:91–99
Tainaka K, Fukazawa S (1992) Spatial pattern in a chemical reaction system: prey and predator in the position-fixed limit. J Phys Soc Jpn 61:1891–1894
Turchin P (2003) Evolution in population dynamics. Nature 424:257–258
Yoshida T, Jones LE, Ellner SP, Fussmann GF, Hairston NG Jr (2003) Rapid evolution drives ecological dynamics in a predator–prey system. Nature 424:303–306
Acknowledgments
This research was supported by Japan Society of Promotion of Science, and by Institution of Statistical Mathematics.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Morita, S., Tainaka, Ki. Undamped oscillations in prey–predator models on a finite size lattice. Popul Ecol 48, 99–105 (2006). https://doi.org/10.1007/s10144-006-0257-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10144-006-0257-0