
Abstract
In this paper we present an evolutionary heuristic for the 2D knapsack problem with guillotine constraint. In this problem we have a set of rectangles and there is a profit for each rectangle. The goal is to cut a subset of rectangles without overlap from a rectangular strip of width W and height H, so that the total profit of the rectangles from the subset is maximal. The sides of the rectangles are parallel to the strip sides and every cutting is restricted by orthogonal guillotine-cuts. A guillotine-cut is parallel to the horizontal or vertical side of the strip and cuts the strip into two separated rectangular strips. Our algorithm is an estimation of distribution algorithm (EDA), where recombination and mutation evolutionary operators are replaced by probability estimation and sampling techniques. Our EDA works with two probability models. It improves the quality of the solutions with local search procedures. The algorithm was tested on well-known benchmark instances from the literature.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the two-dimensional rectangular knapsack problem (2DKP) with guillotine constraint we have a set of m types of rectangles with wi widths, hi heights and a profit pi where i = 1, 2,…, m. The jth type contains uj rectangles. The goal is to cut a selected subset of the rectangles without overlap onto a rectangular strip of width W and height H, so that the total profit of the selected rectangles is maximal. All cuts are orthogonal guillotine-cuts and the rectangles have to be laid out orthogonally on the strip. A guillotine-cut is parallel to the horizontal or vertical side of the strip and cuts the strip into two smaller separated rectangular strips. The problem can be specified with rotation; we will regard the rectangles with fix orientation (notation: 2DKP-OG).
Based on the available number of rectangles in a type and based on the profit we can classify 2DKP. The available number of rectangles can be limited or unlimited, and the profit can be the area of the rectangle or independent from the area. In our algorithm we work with two version of 2DKP:
-
The constrained unweighted version: For each rectangle i, the available number ui is limited and the profit pi is equal to its area. The number of types is m, n = u1 + u2 + ⋯ + um.
-
The constrained weighted version: For each rectangle i, the available number ui is limited and the profit pi is independent of its area. The number of types is m, n = u1 + u2 + ⋯ + um.
The 2DKP belongs to the cutting-packing problems. It is NP-hard (Beasley 2004). Many exact, heuristic and meta-heuristic algorithms have been published to solve the 2DKP and the versions with guillotine constraint. A possible new evolutionary method for the 2DKP-OG is the estimation of distribution algorithm (EDA). The EDA estimates a probability distribution from a set of solutions and usually updates the estimated distribution in every generation. The new solutions are generated using the probability distribution. The new solutions replace a portion of the former population, or the population is fully replaced by the use of a probabilistic model. Therefore the EDA generates descendants without the use of recombination and mutation operations in the following two steps:
-
According to selected individuals it creates, or updates a probabilistic model,
-
Drawing new descendants from the distributions of the probability model (this is the sampling).
In this paper, we are interested in the EDA for 2DKP-OG. Our motivation was to build an EDA for the 2DKP-OG, which gives a better result than the earlier evolutionary techniques. For 0/1 knapsack problem there is a successful EDA (Gao et al. 2014). Our EDA for the 2DKP-OG has harder tasks: it has to select a subset of rectangles and has to organize the guillotine cuts of the selected rectangles.
From the viewpoint of our EDA the difficulties of the 2DKP-OG are the following:
-
We have to select a subset of rectangles for the knapsack.
-
We want to divide the strip into layers with horizontal guillotine-cuts, where the heights of the layers are not known and we do not know the best number of the layers for the optimal solution.
-
We have to choose the best rectangles for every layer from the selected subset of the rectangles.
-
In every layer we have to cut the rectangles with guillotine-cuts. For this we have to give the guillotine-cuttable pattern of the rectangles.
Our EDA works with two probability models. Based on the best solutions this EDA generates a probability model and based on the model it selects the subset of rectangles for cutting. Parallel this probability model the EDA generates another, second probability model and based on the second model it divides the rectangles from the subset into separated groups. Every group gets own layer that is cut by horizontal guillotine-cuts from the strip. This second probability model shows how good it is if the ith and the zth rectangles are placed into the same layer. Higher values show better pairs of rectangles in a layer. To generate a group the EDA compares pairs of rectangles based on the second model. At the end the algorithm gives the guillotine-cuttable pattern of the rectangles for the layers; this is the solution.
To improve the quality of the solutions the algorithm applies local search procedures and with given probability applies the generation of the descendent with selection and with a new mutation operator based on the second probability model too.
Our contribution, therefore, is a new hybrid EDA for the 2DKP-OG (named 2DKEDA) and its key features are the following:
-
The algorithm uses two probability models to generate a descendent.
-
We give a new sampling technique to select the rectangles for the layers.
-
The algorithm improves the quality of the solution with the generation of a descendent with selection and a new mutation operator based on the second probability model too.
The remainder of this paper is organized as follows: “Related works for 2DKP” section describes the typical methods. “Preliminaries” section defines the elements of our cutting procedure; “Probability models and their applications” section describes the probability model and their applications. “The 2DKEDA algorithm” section gives the main steps of the 2DKEDA. The computational results are reported in “Experimental results” section and the conclusions are in “Conclusion” section.
2 Related works for 2DKP
2.1 Exact, heuristic and meta-heuristic methods
2.1.1 Exact methods
Some exact algorithms were published for the 2DKP and for the 2DKP-OG too. For 2DKP the exact methods are for example tree search-based algorithms (Beasley 1985b; Fekete and Schepers 1997; Fekete et al. 2007), and some authors used variants of the branch and bound technique (Hadjiconstantinou and Christofides 1995; Arenales and Morabito 1995; Caprara and Monaci 2004).
For 2DKP-OG we find similar methods: tree search-based algorithms (Viswanathan and Bagchi 1993; Morabito and Arenales 1996; Hifi 1997), branch and bound techniques (Hadjiconstantinou and Christofides 1995; Cung et al. 2000). Other methods are e.g. dynamic optimization methods (Christofides and Whitlock 1977; Beasley 1985a; Cintra and Wakabayashi 2004) and a recursive procedure (Dolatabadi et al. 2012).
We can, however, only use these methods to solve small 2DKP cases within a reasonable period of time.
2.1.2 Heuristic, meta-heuristic methods
The heuristic methods are search algorithms that are able to find the global optimum only with a high degree of probability. We find construction heuristics for the 2DKP (e.g. Wu et al. 2002) and for the 2DKO-OG too (Wang 1983; Vasco 1989; Oliveira and Ferreira 1990; Wei and Lim 2015). The heuristic of Wei and Lim (2015) combines the top-down and bottom-up approaches and combines rectangles into blocks. Fayard et al. (1998) published a heuristic for approximately solving the problem.
There are meta-heuristics for the problem too. There ware published for the 2DKP more genetic algorithm (GA) versions (e.g. Lai and Chan 1997; Beasley 2004; Gonçalves and Resende 2006), but there are simulates annealing, tabu search and GRASP algorithms too (e.g. Chen 2008; Leung et al. 2012; Alvarez-Valdes et al. 2005; Egeblad and Pisinger 2009). For 2DKP-OG we find only a few meta-heuristics: e.g. a tabu search (Alvarez-Valdes et al. 2002) and GA versions (Parada et al. 1995; Bortfeldt and Winter 2009).
2.2 Estimation of distribution algorithm
The EDAs depending on the complexity of the probability models are divided into three groups (Pelikan et al. 1999). The first group are the models without interaction in which the variables of the individual are independent from each other. Pair-wise interactions allow the second group where interactions can occur between each variable pair; and the third, the case of multivariate interactions, complicated dependencies are allowed among variables. The efficiency of the models also varies depending on the interaction too: the linear problems can solve the models of the first group, in case of the pair-wise interactions we can solve quadratic problems, while in case of the multivariate interactions we can solve complex problems.
EDAs can be categorized into three categories based on the solution representation of the problem too, i.e. discrete variables, permutation and real-valued variables. In all categories we can use different probability models according to the interaction between the variables. For example the most important models for the discrete variables are the following:
-
In the models without interactions the variables of the problem are independent. Individuals may be finite bit strings, and the probability models use a probability vector. The vector gives for each bit position an estimated probability. The probability gives the estimated probability of the value 1 on the given bit position. A method in this group is the PBIL (population based incremental learning) (Baluja 1994).
-
Some EDA algorithms allow pair-wise interactions among the variables. Their common feature is that the dependencies are represented with a sequence (chain) among the variables, or a tree structure represents the relations of the variables. Such variations of the methods include the MIMIC (Mutual information maximizing input clustering) (De Bonet et al. 1996), the COMIT (Combining Optimizers with Mutual Information Trees) (Baluja and Davies 1997) and BMDA (bivariate marginal distribution algorithm) (Pelikan et al. 1999).
-
Models with multivariate interactions represent dependencies using either directed acyclic graphs or undirected graphs. Popular models are the Bayesian networks and the Markov networks. An example is the ECGA (extended compact genetic algorithm) (Harik 1999) that groups the variables into independent clusters. Another group of methods learns Bayesian network during the evolution, which can describe even more complex dependencies among the variables. Such methods are the BOA (Bayesian optimization algorithm) (Pelikan et al. 1999), EBNA (estimation of Bayesian Networks algorithm) (Etxeberria and Larranaga 1999) or LFDA (learning factorized distribution algorithm) (Mühlenbein and Mahnig 1999).
There are techniques that grow the efficiency of the EDAs, too. The most important techniques are the parallelization and the hybrid EADs. In the EDAs several computational tasks can be executed in parallel: the fitness evaluation, the model building and the sampling process (see e.g. Ocenasek 2002). The hybrids EDAs usually apply local search procedures. (Detailed descriptions of the EDAs are available in Pelikan et al. 2012).
A lot of applications of the EDAs are available. Typical problems are the scalar and multi-objective optimization, timetabling, scheduling. For packing and cutting problems there are also a few applications: 3D bin packing with EDA (Cai et al. 2013), 3D strip packing with EDA (Pham 2011). For 0/1 knapsack problems there is an EDA algorithm (Gao et al. 2014). To the best of our knowledge, there is not an EDA for 2DKP with guillotine constraint.
3 Preliminaries
Our algorithm gives guillotine-cuttable pattern of rectangles and gives the cutting commands for the patterns. The important elements of our algorithm are the rem set, the layers, the regions with a selection procedure of the regions, the placement heuristics and a placing-cutting procedure. Let us see the details.
3.1 The rem set
Our algorithm selects rectangles for the knapsack. The unselected rectangles will store in the rem set.
3.2 The layers, regions and the selection of the regions
The layer is a shorter strip with the same W width and we can cut it with guillotine-cuts from the strip. (Figure 1 shows an example with two layers on the strip). For a layer our algorithm selects rectangles with the use of the second probability model. Let the set of the selected rectangles be Q.

Layers on the strip with patterns
The first region is the layer itself. After placing a rectangle into the bottom left-hand corner of the region there is more than one way to continue the placing process. If the width or the height of the placed rectangle is equal to the width or the height of the region, we can divide the remainder of the region horizontally or vertically and get the R1 or R2 sub-regions. Otherwise we can divide the remaining region horizontally and vertically into R1 and R2 sub-regions (see Fig. 2). If the width of the R2 sub-region is too small for other rectangle (see Fig. 2a), we cannot use the R2 sub-region, so we only divide the region horizontally, and next we apply the recursive procedure on a remaining region. Using the regions our process guarantees that the rectangles will be placed without overlap and the guillotine constraint is satisfied.

Two possible ways to construct the R1, R2 sub-regions. a dw is too small, b dw is good for packing
3.3 Fit rectangle
If we can place a rectangle into the given region, it is a fit rectangle for the region. The packlayer procedure searches the not-yet-placed, fit rectangles for the region (from the Q set). It selects the fit rectangles and stores the first found fit rectangles into the fit_list vector. The length of the vector is maximum imax (imax = min(n, 200)). If there is no fit rectangle, the fit_list vector will empty and the region will empty.
A random-fit rectangle is a random element of the fit_list.
3.4 Best-fit rectangle
The packlayer procedure searches the best-fit rectangle for the region from Q too. The best-fit rectangle is a fit rectangle with the largest profit. For the best-fit rectangle it checks every rectangle from Q. If there are more best-fit rectangles it selects one of them with the largest width.
3.5 Fit block
If the width of the packed rectangles is smaller than the width of the region, we can apply the local search ImpLS. ImpLS works with the not-yet-packed element of fit_list. It builds blocks combining one, two or three rectangles one after the other from the fit_list. (The height of the block is the maximum height of the rectangles in the block). If ImpLS finds fit blocks for the empty width part of the region, it selects the fit block with the largest total profit.
3.6 Placement heuristics
We use two placement heuristics: HP1, HP2.
-
HP1 it selects the best-fit rectangle for placing.
-
HP2 it selects a random-fit rectangle for placing.
3.7 Placement strategy
Our placement strategy is the following: for packing it selects the HP1 heuristic with probability pbf; otherwise it selects the HP2 heuristic. Next it searches fit block with probability pimp with the ImpLS local search.
3.8 The packlayer procedure
A recursive packing procedure (packlayer) packs rectangles on the area of the layer and gives the cutting commands for the regions and rectangles. The procedure divides the area of the layer into regions and it packs a rectangle into a region. (The packing is similar to Wei and Lim 2015, but we use it with our placement strategy instead of the best fit heuristic).
The Algorithm 1 shows the main steps of packlayer procedure. The procedure has four parameters: vbw—the width of the region; vbh—the height of the region; x00, y00—the bottom left-hand corner of the region. The procedure uses the Q set of the rectangles, which have to pack, and the Q set is available for every recursive call of the procedure. The packing is happening with placement heuristics. When the procedure has completed the packing, we get the layer description. If there are remained unpacked rectangles then the layer is too small for packing all rectangles from Q.

The following example demonstrates the work of the packlayer procedure. Recently the strip has two layers and the procedure generated 4 sub-regions in the first layer and two sub-regions in the second layer. Figure 3a shows the strip with the two layers and the sub-regions that are identified with number. The width and height of the ith sub-region are (wi, hi) (i = 1, 2,…, 6). Figure 3b shows with a tree representation the working process with the region, sub-regions.

Strip with sub-regions and the tree representation
We can generate the cutting commands based on this tree representation. Let H(x, y) and V(x, y) be the guillotine-cut commands. H(x, y) cuts the strip horizontally in the (x, y) point of the region (sub-region), V(x, y) cuts the strip vertically in the (x, y) point of the region (sub-region). In this example the cutting commands are the following:
-
H(0, hl)/* cut the first layer */
-
V(w1, 0), H(0, h1)/*cut the 1. sub-region */
-
H(0, h2), V(w2, 0)/*cut the 2. sub-region */
-
H(0, h3)/*cut the 3. sub-region */
-
V(w4, 0)/*cut the 4. sub-region */
-
H(0, h5)/*cut the 5. sub-region */
-
H(0, h6)/*cut the 6. sub-region */
In every sub-region there are one, or more rectangles; so additional cuts would be necessary to obtain the rectangles.
3.9 Repacking local search
Usually we can repack the rectangles of the layer into a less thick layer. If we reduce the height of the layers and the packlayer tries to repack the rectangles, the packing can be successful (the methods in Wei et al. 2014; Cui et al. 2013; Bortfeldt and Jungmann 2012. try to reduce the height of the layers on the basis of a similar idea). Based on this idea our local search tries to reduce the height of a layer.
3.10 Repair procedure
If the total height of the layers is too large (it is larger as H) the procedure deletes a random rectangle of a random layer and applies the Repacking local search. The deleted rectangles will store in the rem set. If the new total height is smaller as H, the improving is ready. Otherwise the procedure repeats the process; deleting another rectangle.
4 Probability models and their applications
Our EDA is different from the typical EDA methods that were showed in “Estimation of distribution algorithm” section. It handles the interactions among the rectangles, knapsack and layers in two levels: between the knapsack and the rectangles, and among the rectangles and the layers. So for the generation of a descendant it uses two probabilities model one after the other depending on the interactions.
4.1 Probability model for selecting rectangles for the knapsack
At every descendant the EDA selects a set of rectangles for the knapsack based on a probability model. This model is a vector named M1 with n elements.
Every rectangle has a position in M1 that stores the relative frequency of the rectangle in the knapsack. M1 is updated periodically throughout the evolution process using some of the best performing individuals.
Let \( M1_{i}^{gen} \) be the collected relative frequency of the ith rectangles until the genth generation. We can update the elements of the M1 vector
where ΔM1i is the relative frequency of the ith rectangles based on the best individuals of the genth generation and α denotes some relaxation factor (e.g., α = 0.2). We update M1 periodically every knth generation (e.g., kn = 10). The computation of ΔM1i happens as follows:
-
we take the 20% best individuals from the population;
-
we count in ΔM1i how many times the ith rectangle is in the best individuals (i = 1, 2,…, n).
-
we divide the ΔM1i vector by the number of best individuals.
4.1.1 Sampling M1
Sampling M1 selects a set of the rectangles for cutting from the knapsack. It selects the rectangles where
Let the selected rectangles be the QK set. The unselected rectangles will store in the rem set.
4.2 Probability model for selecting rectangles for the layers
With the first probability model we get the selected rectangles. Next we choose the best pairs of rectangles for every layer from the selected set of the rectangles. The pairs of rectangles are selected for a layer based on a second probability model. This probability model shows how good it is if the ith and the zth rectangles are cut from the same layer. Higher values show better pairs of rectangles for cutting from the same layer.
For these we use the EVL technique (see the principle of EVL in Borgulya 2006). Recently we have modified this technique the following way: we have to know the frequency of every pair of rectangles—how often they are members of the same layer in the best solutions. Let ECM (explicit collective memory) be an n × n matrix that stores and learns the relative frequencies of the different pairs. Every rectangle has a row and a column in the matrix. This matrix is updated throughout the evolution process using some of the best performing individuals.
Let \( ECM_{ij}^{gen} \) be the collected relative frequency of the ith and the jth rectangle (a pair) in common layers until the genth generation. We can update the elements of the ECM matrix
where ΔECMij is the relative frequency of the ith and the jth rectangles in common layers based on the best individuals of the genth generation and α denotes some relaxation factor (e.g., α = 0.2). We update ECM periodically every knth generation (e.g., kn = 10). The computation of ΔECMij happens as follows:
-
we take the 20% best individuals from the population;
-
we count how many times the ith and jth rectangles are in common layers in the best individuals (i = 1, 2,…, n; j = 1, 2,…, n)
-
we divide the ΔECM matrix by the number of these ‘best’ individuals.
We use the ECM matrix to estimate the probability of the good pairs of rectangles. The formula
gives the probability that the ith and the jth rectangles are good pair in the same layer.
4.2.1 Sampling ECM
Sampling ECM selects rectangles for the layers of the descendant. For every layer it selects a new Q set from the not yet selected rectangles of QK. The sampling is the following:
-
1.
If there are unselected rectangles in QK, first it chooses an unselected rectangle randomly from QK; if there is not, go to step 3.
-
2.
This rectangle will be the first element in Q. Let this be the ith rectangles. For the other rectangles of Q the sampling selects the rectangles from QK, where
$$ {\text{a random probability}} < pr_{ij} \left( {{\text{the}}\;i{\text{th}}\;{\text{and}}\;j{\text{th}}\;{\text{rectangles}}\;{\text{from}}\;{\text{QK}}} \right). $$If Q is ready then it calls the packlayer procedure, the Repacking procedure and after the profitrepair local search procedure for the layer in this order. The profitrepair procedure selects all the unselected rectangles of QK and all the rectangles of rem and checks them one after the other. The checked rectangle is swapped with one rectangle from the layer and the Repacking procedure is applied. The profitrepair accepts the move if the swap increases the total profit of the layer without increasing the height of the layer.
-
3.
If there are unselected rectangles in QK we repeat the layer generation for a new layer (go to step 1).
-
4.
The sampling is ready. If the total height of the layers is higher as H, it calls the repair procedure.
5 The 2DKEDA algorithm
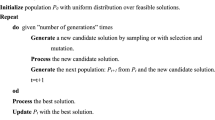
5.1 The main steps of the algorithm
Our 2DKEDA generates only one descendent in every generation. First it generates the initial population. Next, it generates descendents by sampling M1, ECM. After it improves the layers of the descendent with local searches (LS).
For certain tasks, the algorithm might “get stuck” at one of the local optima. To enable escape toward a potential global optimum, the algorithm generates new, additional individuals. A new individual is also a descendent and can help to improve the capability and the speed of the algorithm to find the global optimum. Thus, new descendants are periodically inserted in the population until the maximum size of the population is reached.
Algorithm 2 shows the main steps of 2DKEDA. The parameters of the algorithm are the following:
-
tmax—the maximal size of the population.
-
t—the first size of the population.
-
kn—the algorithm is controlled in every knth generation.
-
timeend—the limit of the running time.
-
gp, rp—parameters of the condition of the Restart procedure.
-
LSremn—parameter of the local searches.

The operations and features are:
Input The algorithm reads the instance and the values of the parameters (they are described and given in “Parameter selection” section). Every rectangle gets different identification number.
Individuals Every individual of population P contains the description of a solution: the layers, the cutting commands and a rem set with rn elements. The rem set stores the rectangles that are not element of the knapsack. The individual gives all the important data of the layers (similar way as in Bortfeldt 2006) the height of the layer, the number of rectangles in the layer and the data of the rectangles: the identification number of the rectangle and the type. Next the individual stores the generated cutting commands, at end stores the element of the rem set (see Fig. 4).

The structure of an individual
Initial block building See “Details of the implementation” section.
Initial population See “Details of the implementation” section.
Fitness function The fitness function of the solution is the total profit of the rectangles in the layers.
Local search The algorithm applies three LSs (LSrem1, LSrem2 and LSrem3). It applies the LSs one after the other (see “Local search procedures” section).
Restart If the fittest solution did not change in the last gp generations, the Restart procedure deletes the weakest solutions (rp proportion of the population).
Reinsertion This is a crowding technique that compares the descendent with the parent. The descendent may replace the parent if the descendent is better. If the descendent is an additional individual or if there are fewer individuals than the size of the population (after Restart procedures), the new descendent is unconditionally inserted into the population until the population size is reached.
Stopping criterion The algorithm is terminated if the running time limit is reached.
5.2 Local search procedures
These LSs insert rectangles from the rem set into the set of rectangles of the layers. There are three LSs: LSrem1, LSrem2 and LSrem3.
LSrem1 inserts a random rectangle from rem into a layer. After insertion, LSrem1 gives the possible highest height to the layer and applies the Repacking procedure. If the insertion improves the fitness value and the total height of the layers is not higher as H, it accepts the move and modifies the layer descriptions and the rem set. LSrem1 makes these move on every layer.
LSrem2 and LSrem3 work similar way as LSrem1, but LSrem2 insert a random group of rectangles from rem into a layer, and LSrem3 insert every rectangle from rem into a layer. If after the use of the packlayer procedure the new elements of the layer improve the fitness value and the total height of the layers is not higher as H, it accepts the moves and modifies the layer descriptions and the rem set.
We apply the LSs one after the other: LSrem1 + LSrem2 + LSrem3 and repeat the group LSremn times.
5.3 Details of the implementation
When describing the algorithm, some heuristic solutions were not described. Let us see them now one-by-one.
5.3.1 Initial block building
The algorithm can build blocks if there is a type with more rectangles. Using the initial blocks the algorithm can run faster.
It works with the blocks as new rectangles and defines new rectangle-types for the blocks (width and height). At every type with more elements the algorithm builds blocks with pblock probability. The blocks can build from two or four rectangles of the same type. After the initial block building an additional sub-type shows the block structure (notation: btype = 1, or 2, or 3, or 4) at every type. The values of the ith sub-type are the following:
-
1.
There is not block, the type reminds the initial input type. btype = 1
-
2.
If the number of rectangles of the ith type is more than three, it builds larger rectangles with 2*wi width and 2*hi height if we can place the blocks onto the strip. The algorithm builds all possible blocks and the blocks get a new number of type. btype = 4.
-
3.
If there are remained elements after the second step and the number of remained rectangles of the ith type is more than two, with 0.5 probability it builds larger rectangles with 2*wi width and hi height (otherwise with wi width and 2*hi height) if we can place the blocks onto the strip. The algorithm builds all possible blocks and the blocks get a new number of type. btype = 2 (or btype = 3).
At the end the algorithm updates the number of the types and all rectangles get identification numbers.
5.3.2 Initial population
The initial population we can generate by sampling M1 and ECM. But based on our test results, we can improve the quality of the initial population the following random generation:
For every individual we first give the set of all the rectangles and call the packlayer procedure to pack the first layer, where the height of the layer is a random height from the interval [H*0.3, H − 1]. If there are remained unpacked rectangles, we generate the next layer: we give the set of the remained rectangles and call the packlayer procedure to pack the next layer with the same height. We repeat the process if the total height of the layers is not higher as H. If it is necessary at end it applies the repair procedure. The unselected rectangles will store in the rem set.
5.3.3 Mutation based on the ECM model
With the use of the two probabilities models we can generate descendent in our EDA. Recently we get the descendent in two steps: sampling M1 and sampling ECM. In an evolutionary algorithm usually we generate the descendent in the following steps: selection of the parents, with recombination of the parents we get the descendent and after with mutation we modify the new descendent. Recently we propose that instead of recombination and mutation we can use only mutation based on the ECM probability model.
Let the new mutation be a swap of rectangles between two layers in the descendent. The mutation is based on the ECM, so it selects the ith and the jth rectangles from the given layer with the largest prij and selects randomly another kth rectangles from the layer (the number of the rectangles in the layer ≥ 3). If the ith and kth rectangles are in the same layer of the best individual it do not make swap. Otherwise it chooses the zth rectangle from other layer with the largest priz probability and swaps the kth, zth rectangles between the layers.
We can use this new mutation operator: we can generate the descendent with truncation selection and mutation based on the ECM. The quality of the descendent is good (see the test results in “Parameter selection” section), so we generate the descendent two different ways in our algorithm. With psamp probability the algorithm applies the sampling M1 and ECM, otherwise it applies the selection and mutation:
-
Selection operator The algorithm selects an individual based on truncation selection. In this selection, only the best tp percentage of the population is considered a potential parent.
-
Mutation operators The mutation is swap of rectangles between two layers based on the ECM model. It repeats the swaps three times and after applies packlayer, repacking for the layers. If the total height of the layers is too large, it applies the repair procedure.
6 Experimental results
The 2DKEDA algorithm was implemented in C++. It was executed on an iMAC with an Intel Core i5 2.5 GHz processor with 16 GB of RAM, running the macOS Sierra 10.12.2 operating system.
We tested our algorithm with benchmark instances that are used generally in publications. The instance sets available e.g.: http://www.computational-logistics.org/orlib/topic/2dkpp-gcut/index.html.
The constrained unweighted instances are the following:
-
set1 consists 46 instance. In these instances m ranges from 10 to 56 and n ranges from 18 to 258. The names of the instances are: OF1, OF2, W, CU1-CU11, 2s, 3s, A1s, A2s, CHL1s-CHL4s, CHL5-CHL7, Hchl3s-Hchl8s, A3-A5, APT30-APT39.
-
set2 consists 13 instances. In these instances m ranges from 10 to 50 and n ranges from 10 to 50. The names of the instances are: gcut1–gcut13.
-
set3 with 21 instances. In these instances m and n range from 16 to 197. The names of the instances are: C11–C73.
The constrained weighted instances are:
-
set5 consists 36 instances. In these instances m ranges from 10 to 60 and n ranges from 19 to 325. The names of the instances are: CHW1, CHW2, CW1-CW11, 2, 3, A1, A2, STS2, STS4, Hchl1, Hchl2, Hchl9, APT40-APT49.
-
set6 consists 21 instances. In these instances m ranges from 5 to 33 and n ranges from 7 to 97. The names of the instances are: ngcut–ngcut12, hccut03, hccut08, wang20, cgcut03, okp1-okp5.
-
set7 consists 630 instances. The name of the instance set is ngcutfs. There are tree problem types (subsets in set7: ngcutfs1, ngcutfs2 and ngcutfs3). In these instances m is varied m = 40, 50, 100, 150, 250, 500, 1000 and n ranges from 40 to 4000. In every problem type for every m the number of rectangles per instance is n = m*Q, where Q = {1, 3, 4}.
6.1 Parameter selection
We analysed the process of 2DKEDA to determine how the parameter values affect the convergence. From the 767 test instances we chose 30 instances for the parameter selection. They are the first 5 instance groups of the set3, the first 10 instances of the ngcutfs2 instance group and the APT40–APT44 instances of the set5 data set.
Because our algorithm has similar structure and parameters as our earlier algorithm had in (Borgulya 2014), we could accept the earlier parameter values. These parameters are the population size (t and tmax parameter), the frequency of checks (kn parameter), the generation in the first stage (itt parameter), the parameters of the Restart procedures (gp and rp) and of the truncation selection (tp). The accepted parameter values are the following: t = 5, tmax = 30, itt = 5, kn = 5, gp = 300, rp = 0.7 and tp = 0.1.
The parameter values of the initial block building, the fit block search, the LSs and of the sampling are new parameters in 2DKEDA. These parameters are the pblock, pimp, LSremn and psamp.
-
For the value of the pblock we analyzed different values: 0, 0.1, 0.2,…, 0.9, 1. We got the average best result at 0.5 probability.
-
For the probability of the fit block search we analysed the 0, 0.25 and 0.5 values. We got the average best result at pimp = 0 or at pimp = 0.25 probabilities depending on the instances.
-
LSremn is an important parameter: with the use of the LSs we can improve significantly the quality of the result. The algorithm gives with more than 15–20% better results if we use the LSs.
The LS parameter depends on the instances too. We analysed different values for LSremn, and found more appropriate values based on the average best results. At the end we choose the following values: if n is fewer than 100, LSremn = 1000 or 2000; if it is bigger than 100, LSremn = 20 or 200.
-
2DKEDA can generate the descendant with sampling or with selection and mutation.
For the value of the psamp we analyzed different values: 1, 0.75, 0.5, 0.25 and 0. We can see the results in Table 1. The table gives the average best results and the average results on the selected instances for the parameter selection. The best solutions are highlighted with bold characters in Table 1. We got the best results of set5 at psamp = 0 probability, and the best results of set3 at psamp = 1 probability. So the application of the selection and mutation improved the best result of set5 with 0.6–2.5%. At set3 we got the second best result at psamp = 0 probability, too. The best results of set7 are also at psamp = 0 probability, but the differences in the results are not large; we can use other psamp probabilities as well.
Table 1 Results (gap %) on the selected instances Because the best psamp probability depends on the instances we decided to use both psamp = 1 and psamp = 0. During the test the algorithm ran 10 times on each test instance. We modified to use of the psamp parameter during the 10 runs the following way: psamp = 1 in 5 runs and psamp = 0 in 5 runs.
For the time limit we found different values in the papers: the method of Wei and Lim (2015) allowed duration of 120 CPU seconds for each test problem (except the gcut13 from set2, where the time limit was 365 s), but the other methods (e.g. Bortfeldt and Winter 2009) did not give a time limit. We allowed duration of 300 CPU seconds for each test problem.
6.2 Computation experience
2DKEDA was run 10 times on each test instance of the test sets, and we provide the best results for every instance or as gap %, which is the percentage gap to the profit upper bound (or optimum) (notation UB), namely, gap % = 100 *(UB–obtained solution)/UB. The results on the test sets available in the “Appendix”.
The test results show that the average best results in gap % are fewer as 1% on set1, set2, set5 and set6; in the case of set3 and set7 the gap % is 1.37 and 1.11 respectively. The algorithm provided the best results on set2 and set6 and on the large instances of set7. On set2 and set6 the gap % is 0.13 and 0.15 respectively and in both cases there were only two instances where the algorithm did not find the optimal solutions. On the set7 if m ≥ 500 or n ≥ 1000 the gap % is between 0 and 0.08 and in 75% of these instances it managed to find the optimal solutions. The best results show that the success of 2DKEDA is not instance-size dependent.
Figures 5 and 6 show the convergence behaviour of the algorithm. Figure 5 shows the results of the C5, C6 and C7 instance groups from set3. They are medium and large instances: 72 < n < 198. 2DKEDA ran 500 CPU seconds on each instance and the figure shows the average best results (in gap %) at the end of 5, 10, 30, 60, 120, 240, 360 and 500 CPU seconds. The curves show that 2DKEDA improves the results continuously; so we can increase the likelihood of finding better solutions by choosing longer running times.

Convergence behaviour of 2DKEDA on set3

Convergence behaviour of 2DKEDA on set1
Figure 6 shows the results of the ATP30, ATP31 and ATP32 instances from set1. They are large instances: 191 < n < 259. The running time was 300 CPU seconds on each instance and the figure shows the average best results (in gap %) at the end of 5, 10, 30, 70, 150, 230 and 300 CPU seconds. The algorithm is more effective with these instances than the C5, C6 and C7 from set3. In the first 5 s the gap % are smaller than 1.4% and slowly descends to 0.3–0.8%. Because the improvement of the results is very slow, a longer running time cannot help finding better solutions.
Our goal was to build an estimation of distribution algorithm for the problem, which gives better result than the earlier evolutionary techniques. For 2DKP-OG we find only a few meta-heuristics, evolutionary methods. So for comparison we can chose only the CLGAL from Bortfeldt and Winter (2009) that is a GA and one of the best heuristics for the problem. The CLGAL was executed on Intel PC Core2 at 3 GHz processor with 2 GB RAM. It was implemented in C, and the authors did not give a time limit. In our comparison we give the results of IBBA from Wei and Lim (2015) too, that is recently the best heuristic for the problem. The IBBA was executed on an Intel Xeon E5430 clocked at 2.66 GHz (Quad Core) with 8 GB RAM running the CentOS 5 linux operating system. It was implemented in C++ and the time limit is set to 120 s for each instance.
For comparison we show the results based on Wei and Lim (2015). The comparison between CLGAL, IBBA and 2DKEDA is summarized in Table 2. This table gives the average best result in gap %, the names of the sets, the methods, the number of instances in the sets (#inst) and the number of instances where optimal solutions were found (#opt). The best solution is highlighted with bold character in Table 2. On the set1, set2 and set5 the results of CLGAL were not published. In the comparison of 2DKEDA and CLGAL, we see that CLGAL has only on the set3 better result with 0.16 gap %. On the set6 2DKEDA is better with 1.1 gap % and on the subsets of set7 2DKEDA has better results with 0.11–0.22 gap %. Comparing the number of the optimal solutions found shows that 2DKEDA has better results on set3, set6 and set7 as well.
In the comparison of 2DKEDA and IBBA we see that every result of IBBA is better. IBBA has better results with 0.1–0.8 gap % and found more optimal solutions, too. The results of the algorithms are similar only at set2. We can compare the running times of IBBA and 2DKEDA, too. 2DKEDA use about two times more running times than IBBA.
We can conclude that 2DKEDA is better evolutionary method for the problem as CLGAL based on the comparison.
7 Conclusion
In this paper we have presented an estimation of distribution algorithm for the 2D knapsack problem with guillotine constraint. Our algorithm uses two probability models to generate a descendent. Based on the first model it selects the subset of rectangles for cutting and based on the second model it divides the rectangles from the subset into separated layers. We give a new sampling technique to select the rectangles for the layers. The algorithm improves the quality of the solution with the generation of a descendent with selection and a new mutation operator based on the second probability model too.
Our goal was to build an estimation of distribution algorithm for the problem, which gives better result than the earlier evolutionary technique. For comparison we can choose only the CLGAL from Bortfeldt and Winter (2009), which is one of the best heuristics for the problem. The comparison between CLGAL and our algorithm show that our evolutionary algorithm has better results generally.
References
Alvarez-Valdes R, Parajón A, Tamarit JM (2002) A tabu search algorithm for large-scale guillotine (un)constrained two-dimensional cutting problems. Comput Oper Res 29:925–947
Alvarez-Valdes R, Parreño F, Tamarit JM (2005) A GRASP algorithm for constrained two-dimensional non-guillotine cutting problems. J Oper Res Soc 56:414–425
Arenales M, Morabito R (1995) An AND/OR-graph approach to the solution of two dimensional non-guillotine cutting problems. Eur J Oper Res 84:599–617
Baluja S (1994) Population-based incremental learning: a method for integrating genetic search based function optimization and competitive learning. Technical Report No. CMU-CS-94-163, Carnegie Mellon University, Pittsburgh, PA
Baluja S, Davies S (1997) Using optimal dependency-trees for combinatorial optimization: learning the structure of the search space. In: Proceedings of the international conference on machine learning, pp 30–38
Beasley JE (1985a) Algorithms for unconstrained two-dimensional guillotine cutting. J Oper Res Soc 36:297–306
Beasley JE (1985b) An exact two-dimensional non-guillotine cutting tree search procedure. Oper Res 33:49–64
Beasley JE (2004) A population heuristic for constrained two-dimensional non-guillotine cutting. Eur J Oper Res 156:601–627
Borgulya I (2006) An evolutionary algorithm for the biobjective QAP. In: Reusch B (ed) Computational intelligence, theory and applications, advances in soft computing. Springer, Berlin, pp 577–586
Borgulya I (2014) A parallel hyper-heuristic approach for the two-dimensional rectangular strip-packing problem. J Comput Inf Technol 22(4):251–266
Bortfeldt A (2006) A genetic algorithm for the two-dimensional strip packing problem with rectangular pieces. Eur J Oper Res 172:814–837
Bortfeldt A, Jungmann S (2012) A tree search algorithm for solving the multi-dimensional strip packing problem with guillotine cutting constraint. Ann Oper Res 196:53–71
Bortfeldt A, Winter T (2009) A genetic algorithm for the two-dimensional knapsack problem with rectangular pieces. Int Trans Oper Res 16:685–713
Cai Y, Chen H, Yu R, Shao H, Li Y (2013) An estimation of distribution algorithm for the 3D bin packing problem with various bin sizes. Ideal 2013, vol 8206, pp 401–408
Caprara A, Monaci M (2004) On the 2-dimensional knapsack problem. Oper Res Lett 32:5–14
Chen Y (2008) A recursive algorithm for constrained two-dimensional cutting problems. Comput Optim Appl 41:337–348
Christofides N, Whitlock C (1977) An algorithm for two-dimensional cutting problems. Oper Res 25(1):30–44
Cintra G, Wakabayashi Y (2004) Dynamic programming and column generation based approaches for two-dimensional guillotine cutting problems. In: Ribeiro CC, Martins SL (eds) WEA 2004, LNCS 3059, pp 175–190
Cui Y, Yang L, Chen Q (2013) Heuristic for the rectangular strip packing problem with rotation of items. Comput Oper Res 40:1094–1099
Cung V, Hifi M, Le Cun B (2000) Constrained two-dimensional guillotine cutting stock problems: a best-first branch-and-bound algorithm. Int Trans Oper Res 7:185–201
De Bonet JS, Isbell CL, Viola JrP (1996) MIMIC: finding optima by estimating probability densities advances in neural information processing systems 9. NIPS, Denver, CO, USA, 2–5 Dec 1996
Dolatabadi M, Lodi A, Monaci M (2012) Exact algorithms for the two-dimensional guillotine knapsack. Comput Oper Res 39:48–53
Egeblad J, Pisinger D (2009) Heuristic approaches for the two- and three-dimensional knapsack packing problem. Comput Oper Res 36(4):1026–1049
Etxeberria R, Larranaga P (1999) Global optimization using Bayesian networks. In: Rodriguez MR, Ortiz S, Hermida RS (eds) Second symposium on artificial intelligence (CIMAF-99). Habana, Cuba, pp 332–339
Fayard D, Hifi M, Zissimopoulos V (1998) An efficient approach for large-scale two-dimensional guillotine cutting stock problems. J Oper Res Soc 49:1270–1277
Fekete SP, Schepers J (1997) On more-dimensional packing III: Exact algorithms. Technical Report ZPR97-290, Mathematisches Institut, Universität zu Köln
Fekete SP, Schepers J, van der Veen JC (2007) An exact algorithm for higher-dimensional orthogonal packing. Oper Res 55:569–587
Gao S, Qiu L, Cungen C (2014) Estimation of distribution algorithms for knapsack problem. J Softw 9(1):104–110
Gonçalves JF, Resende MGC (2006) A hybrid heuristic for the constrained two-dimensional non-guillotine orthogonal cutting problem. AT&T Labs Research Technical report TD-&UNQN6
Hadjiconstantinou E, Christofides N (1995) An exact algorithm for general, orthogonal, two-dimensional knapsack problems. Eur J Oper Res 83:39–56
Harik G (1999) Linkage learning via probabilistic modeling in the ECGA. IlliGAL technical report Illinois Genetic Algorithms Laboratory Urbana
Hifi M (1997) An improvement of Viswanathan and Bagchi’s exact algorithm for constrained two-dimensional cutting stock. Comput Oper Res 24(8):727–736
Lai KK, Chan JWM (1997) An evolutionary algorithm for the rectangular cutting stock problem. Int J Ind Eng 4:130–139
Leung SCH, Zhang D, Zhou C, Wu T (2012) A hybrid simulated annealing metaheuristic algorithm for the two-dimensional knapsack packing problem. Comput Oper Res 39(2012):64–73
Morabito R, Arenales M (1996) Staged and constrained two-dimensional guillotine cutting problems: an AND/OR- graph approach. Eur J Oper Res 94:548–560
Mühlenbein H, Mahnig T (1999) FDA—a scalable evolutionary algorithm for the optimization of additively decomposed functions. Evol Comput 7(4):353–376
Ocenasek J (2002) Parallel estimation of distribution algorithms. Ph.D. thesis, Brno University of Technology
Oliveira JF, Ferreira JS (1990) An improved version of Wang’s algorithm for two-dimensional cutting problems. Eur J Oper Res 44:256–266
Parada V, Munoz R, Gomes A (1995) A hybrid genetic algorithm for the two-dimensional cutting problem. In: Biethahn J, Nissen V (eds) Evolutionary algorithms in management applications. Springer, Berlin
Pelikan M, Goldberg DE, Cantú-Paz E (1999) BOA: the Bayesian optimization algorithm. In: Proceedings of the genetic and evolutionary computation conference (GECCO-99), pp 525–532
Pelikan M, Hauschild MW, Lobo FG (2012) Introduction to estimation of distribution algorithms medal report No. 2012003 University of Missouri-St. Louis
Pham N (2011) Investigations of constructive approaches for examination timetabling and 3D-strip packing. Ph.D. thesis, University of Nottingham
Vasco FJ (1989) A computational improvement to Wangs’s two-dimensional cutting stock algorithm. Comput Ind Eng 16(1):109–115
Viswanathan KV, Bagchi A (1993) Best-first search methods for constrained two-dimensional cutting stock problems. Oper Res 41(4):768–776
Wang PY (1983) Two algorithms for constrained two-dimensional cutting stock problems. Oper Res 31:573–586
Wei L, Lim A (2015) A bidirectional building approach for the 2D constrained guillotine knapsack packing problem. Eur J Oper Res 242:63–71
Wei L, Tian T, Zhu W, Lim A (2014) A block-based layer building approach for the 2D guillotine strip packing problem. Eur J Oper Res 239:58–69
Wu YL, Huang W, Lau SC, Wong CK, Young GH (2002) An effective quasi-human based heuristic for solving the rectangle packing problem. Eur J Oper Res 41:341–358
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
In the appendix the tables give the results of the test sets. In the tables we see the names of the instances or instance groups, the number of types of rectangles (m) the number of rectangles (n), the optimum or upper bound (opt/upper), the number of instances where the optimal solutions were found in an instance group (#opt) or the number of optimal solutions found at an instance in 10 run (Hits), the average best result in gap % of an instance group or the best profit found at an instance.
See Tables 3, 4, 5, 6, 7, 8, 9 and 10.
Rights and permissions
About this article

Cite this article
Borgulya, I. An EDA for the 2D knapsack problem with guillotine constraint. Cent Eur J Oper Res 27, 329–356 (2019). https://doi.org/10.1007/s10100-018-0551-x
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10100-018-0551-x