
Abstract
This paper handles the issue of adaptive control and faults estimation of a class of T-S singular fractional order systems(SFOSs) with \(H_{\infty }\) performance, where the fractional order belongs to (0, 1). Firstly, a novel observer for SFOSs is proposed, which estimate unmeasurable or partially measurable state and faults, simultaneously. Secondly, regarding to the information obtained by the above observer and the designed adaptive parameters, an adaptive controller is proposed to estimate actuator faults of the SFOSs. Further, it is indispensable to ensure the admissibility of the proposed fuzzy SFOSs with \(H_{\infty }\) performance, novel sufficient conditions are obtained by linear matrix inequalities (LMIs), Finally, to illustrate the method proposed above is available, simulation examples are presented.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In recent years, due to the description is more in line with real life, singular systems, that is, descriptor systems or generalised systems, have been widely conducted in various aspects of control field, such as electromagnetic systems, biological systems, flexible structures [1,2,3]. Generalized systems, which are more superior to complex phenomena than the normal system, so it has attracted the attention of many scholars [4,5,6]. Nevertheless, with the deepening of research, generalized system is far from meeting the needs of normal applications, so the fractional order system has slowly entered our sight. The industrial process has been refined under the fractional derivatives and calculus, which makes the research of fractional order systems(FOSs) very meaningful [7,8,9]. For an operating system, maintaining stable performance is the most valued actual issue. Lots of efficient stability conditions of FOSs have been established in [10,11,12,13]. According to LMIs, the stability analysis of fractional commensurate order systems with the cases of \(0<\alpha <2\) was presented in [10]. As stated in [13], a novel conceptual unified framework for fractional neural networks was proposed because of fractional calculus has been classified as artificial neural networks. Since these two systems both play a vital role in control theory, the two systems are combined into a complex system, singular fractional order system, which is a new area worthy researching and have achieved abundant research results in recent years [14,15,16]. Guo et al. [14] focused on the stabilization problem for SFOSs by LMIs and a static output feedback controller was designed. In [15], a superior criteria have been put forward by strict LMI approach without equality constraints to obtain the stability of SFOS.
As we all know, in practice, most physical models are nonlinear. The control approach based on Takagi-Sugeno fuzzy systems is an efficient way to discuss complex nonlinear systems. Up to now, fuzzy systems have gained widespread attention and significant results have been published for T-S fuzzy systems [17,18,19,20]. With a novel fuzzy observer and membership functions, Wang et al. [17] designed an algorithm and a novel controller to guarantee the asymptotically stable of the fuzzy \(H_{\infty }\) systems. Han et al. [18] addressed the application of multi-dimensional T-S fuzzy systems to eliminate the impact of failures. In [19], the novel descriptor observer and controller were designed to estimate faults, external noise and promoted the transformed closed-loop system to be asymptotically stable. Afterwards, an adaptive sliding mode controller strategy, whose sliding surface has already been constructed to process T-S fuzzy SFOSs with unknown constants in [21]. In order to be more realistic and achieve better performance, Asemani et al. [22] proposed sufficient conditions for stabilizing and designed a robust \(H_{\infty }\) observed-based controller for T-S fuzzy systems with uncertainty by LMI.
In fact, due to engineering and practical applications, it is inevitable that faults always exist, which requires many experts to spend a lot of energy to eliminate [23,24,25,26]. Compared with traditional feedback control, adaptive control design can better deal with the uncertainties in system dynamics and failures that may occur during system operation. In [26], a novel way is proposed to rape with the unknown singular systems by transforming it into the non-singular form with faults. Furthermore, an adaptive neural network approximation model for a nonlinear function is given. The key to the design task is to find a suitable adaptive law and a matched controller, so that under the condition of model matching, the adaptive controller still automatically adjust the remaining controller even though other actuators in the control system have unknown failures, which eventually achieve the desired control objective [27,28,29]. For the in-depth study, it is necessary to research the specific system, whose development is not completed, and there are still some aspects worth complementing.
Motivated by the above discussions, as a result of the increase in engineering accuracy requirements, it is inevitable to study the issue of adaptive observer for T-S fuzzy singular FOSs, which have not been studied completely. The contributions of the paper can be summarized as follows:
-
1.
A new adaptive observer based on fault-tolerant control for SFOSs is proposed by designing sliding mode reaching law, which ensure that the stability of T-S fuzzy SFOSs and the regular condition towards the sliding surface has been improved.
-
2.
A convex combination technique is developed, such that the proposed fault-tolerant control way is valid for the fuzzy systems with faults.
-
3.
Due to the information obtained by the above observer and the designed adaptive parameters, according to the adaptive control law, an adaptive observer-based controller is proposed, which is more practical to estimate actuator faults of the SFOSs. The stability conditions in this paper reduce the conservatism and computational burden.
-
4.
Further, novel sufficient conditions are obtained to ensure the stability ofthe proposed T-S fuzzy SFOSs with \(H_{\infty }\) performance in terms of LMI. Compared with the existed references, the \(H_{\infty }\) control method is more concise and more convenient for calculation with faults. Finally, to illustrate the proposed method is available, numerical examples are presented.
The rest of the paper is divided into the following sections. Section 2 presents some basic formula expressions. Section 3 gives an account of main results of the paper. In Sect. 4, numerical examples are given to display the validity of the theorem we proposed and Sect. 5 is the conclusion of the paper.
Notation: Here, it gives the definition of the symbols used in this paper. \(X^T\) expresses the transposition of the matrix X. \(\mathrm {sym}\{X\}\) means the form of \(X+X^T. \) \(*\) notes a corresponding symmetric matrix. If there is no special description, for the dimensions of the matrix, which should be compatible.
2 Problem formulation and preliminaries
In this part, some preliminary for T-S fuzzy singular fractional order systems are given.
Definition 1
[11] The Caputo derivative of f(t) is expressed as follows , where \(\alpha \) belongs (0, 1) :
where \(\varsigma -1<\alpha \le \varsigma , \varsigma \in Z^+,\) and \(\varGamma (x)=\int ^{\infty }_{0}e^{-t}t^{x-1}dt\) is gamma function. For convenience, we simplify \(_{c}D^{\alpha }_{t}x(t)\) to \(D^{\alpha }x(t).\)
Immediately afterwards, the continuous-time fuzzy T-S singular fractional order systems is given as follows:
\(R_{i}(t):\) IF \(\mu _{1}(t)\) is \(D_{1i}\), \(\mu _{2}(t)\) is \(D_{12},\)..., \(\mu _{j}(t)\) is \(D_{1j},\) THEN
where i is the number of IF-THEN rules, \(i=1,2,...,r.\) \(D_{i j}\) are the fuzzy sets, \(x(t)\in \mathbb {R}^{n}\) stands state vector, \(u(t)\in \mathbb {R}^{m}\) represents control input, \(f_a(t)\) means actuator faults. \(A_{i}, B_{i}, C_{i}\) are constant matrices. \(E\in \mathbb {R}^{n}\) and \(\mathrm {rank}(E)=r<n,\) which is singular. Afterwards, the overall T-S fuzzy SFOSs are expressed as follows:
where \(h_i(\mu (t))=\frac{\varpi _{i}(\mu (t))}{\sum \nolimits _{i=1}^{r}\varpi _{i}(\mu (t))},\) \(\varpi _{i}(\mu (t))=\prod \nolimits _{j=1}^{p}D_{ij}(\mu _{j}(t)),\) in which \(D_{ij}(\mu _{j}(t))\) are the grade of membership of \(\mu _{j}(t)\) in \(D_{ij}.\) If \(\varpi _{i}(\mu (t))>0,\) then, \(\sum \nolimits _{i=1}^{r}\varpi _{i}(\mu (t))\ge 0.\) Therefore, \(h_i(\mu (t))\ge 0,\) \(\sum \nolimits _{i=1}^{r}h_i(\mu (t))=1.\)
In addition, the fault-tolerant control problem is investigated. The next step is to devise an adaptive control law that forces the system state to reach the sliding surface under possible actuator fault. The detailed flow diagram of the proposed approach is shown in Fig. 1 to clarify the design procedure and structure.

Flow diagram in SFOS (3)
Next, in order to achieve our objective, some Lemmas are needed in the sequel.
Definition 2
[30] For a generalized fractional order system \(ED^{\alpha }(t)=Ax(t),\) which is said to be regular if \(\mathrm {det}(s^{\alpha }E-A)\) is not identially zero. When \(\mathrm {deg}(\mathrm {det}(sE-A))=\mathrm {rank}(E),\) unforced SFOSs are impulse free, which is also stable as the generalized eigenvalues of \(\mathrm {det}(\lambda E-A)=0\) lying in \(D_{\alpha }=\{\lambda : |arg(\lambda )| > \frac{\alpha \pi }{2}\}.\) SFOSs are admissibile if the above three conditions are fulfilled.
Lemma 1
[15] The singular FOS in Definition 2 with \(0<\alpha <1\) is admissible iff there exist matrices X and Y, P satisfying
and
where \(r=e^{j(1-\alpha )\frac{\pi }{2}}.\)
Lemma 2
[14] Suppose SFOS in Definition 2 is regular, and M and N are invertible matrices such that
where \(\lambda _{max}(\bar{A_1})>0,\,N_{n-m}\) is nilpotent matrix.
When the regularity of SFOS in definition 2 is unknown, and M and N are invertible matrices such that
Lemma 3
[31] A, B are known matrices and \(\varTheta \in \mathrm {H}_{n},\varPhi \in \mathrm {H}_{2},\varOmega \in \mathrm {H}_{2}\). Define \(\varLambda \) as follows,
Then, there exist \(P,Q>0\) such that
Lemma 4
[30] Suppose \(S_1\) and \(S_3\) are symmetric matrices and \(S_2\) is constants matrix, then \(S_1+S_2S^{-1}_3S_2^T<0\) iff
Lemma 5
[9] Suppose D and E are constant matrices and S is a symmetric matrix, which satisfy the following inequality \(S+DFE+(DFE)^T<0\) with F satisfying \(F^TF\le I,\) if and only if for some \(\varepsilon >0,\)
3 Main results
3.1 Adaptive observer design
First, based on the adaptive control strategy, an observer is designed.
Subsequently, \(e(t)=x(t)-{\hat{x}}(t)\) means the error of state variable and \(e_{y}(t)=y(t)-{\hat{y}}(t)\) represents the error of output variable. Therefore, the above-mentioned equivalent adaptive fuzzy controller can be rephrased into the following form:
where \(H_{i}, \mathcal {K}_{i}\) are constant matrices under the constraint condition \(\mathrm {det}(H_{i}B_{i})\ne 0.\) Next, the error system is given as follows:
Substituting the equivalent control law (8) into (3) and defining \(\xi (t)=\left[ \begin{array}{ccc} x^{T}(t)&e^{T}(t) \end{array} \right] ^T,\) the error dynamic can be acquired as:
where \({\bar{A}}_{i}=\left[ \begin{array}{ccc} A_{i}+B_{i}\mathcal {K}_{i}&{}-B_{i}\mathcal {K}_{i}-G_{i}A_{i}\\ A_{i}-L_{i}C_{i}-B_{i}\mathcal {K}_{i}-G_{i}A_{i}&{}B_{i}\mathcal {K}_{i}, \end{array} \right] ,\) \(G_i=B_{i}(H_{i}B_{i})^{-1}H_{i}.\)
3.2 Admissibility analysis
In this section, we consider the issue of the admissibility of closed-loop error dynamic system (10). In order to simplify, we make the following equivalent transformation of the symbol. \(h_{\mu }=\sum \limits _{i=1}^{r}h_i(\mu (t)),{\bar{A}}_{h}=h_{\mu }{\bar{A}}_{i}, C_{h}=h_{\mu }C_{i}, G_{h}=h_{\mu }G_{i}, L_{h}=h_{\mu }L_{i}, \mathcal {K}_{h}=h_{\mu }\mathcal {K}_{i}.\)
Theorem 1
T-S singular FOS (3) is asymptotically stable with adaptive controller (8) and the fractional order belongs to \( 0<\alpha <1 \) if X is symmetric matrix and \(P_{1i}>0,P_{2i}>0,Y\) are constant matrices and a scalar \(\beta >0\) satisfying the following LMIs:
where
Proof
Substituting \({\bar{A}}_{h},\) and P into (12), we can obtain the inequality (13), then, the following results are given:
As a result of lemma 1, T-S singular FOS (10) is asymptotically stable.
Remark 1
It is obvious that the inequality (11) in Theorem 1, is not strict LMIs, which contains constraints condition and make calculation difficult. To solve the problem, matrix S is given, satisfying \(ES=0\) and we give the following Theorem.
Theorem 2
T-S singular FOS (3) is asymptotically stable with adaptive controller (8) and the fractional order belongs to \( 0<\alpha <1 \) if there exists real symmetric matrices X, Y, \(P,Q_{i}\) satisfying the following LMIs:
After that, since the proof method is similar to Theorem 1, it will not be explained in detail herein.
3.3 Adaptive laws design
In this part, an adaptive law is designed to guarantee the error system reach stability state in a limited time. In order to be necessary, we pull in the following assumption.
Assumption 1
The subsystem of the error dynamic system (9) is bounded and satisfying
where \(\delta _{i}\) are known positive constant.
Subsequently, we give the adaptive control laws, whose parameters are given below. The adaptive parameters \(\hat{\delta }_{i}, \hat{\gamma }_{i1}, \hat{\gamma }_{i2}\) to estimate \(\delta _{i}, \gamma _{i1}, \gamma _{i2}\), respectively. The estimation errors are expressed as follows:
Then, we propose the adaptive controller laws such that the reachability condition is obtained.
where \(\sigma _{1i}, \sigma _{2i},\sigma _{3i},\varepsilon _{0}\) are positive scalar, \(E_1=MEN=\left[ \begin{array}{cc} I_m &{} 0\\ 0&{} N_{n-m} \end{array} \right] \) is defined in lemma 2, \(\nu _{i}(t)\) is continuous differentiable function, whose expression is given in (19) below and \( T_{i}\) is constant known matrix.
Afterwards, in order to prove that the designed controller make the system stable in a finite time, we propose a Lyapunov functional candidate.
Calculating the fractional derivative of \(T_{i}(t)\), then
Substituting (17) into (19), the following inequality is given.
Then, to exchange (18) into (21), it obtains,
After that, it prove that the designed controller make the error system stable in a finite time.
Remark 2
In practical applications, Under normal circumstances, e(t) is unknown or difficult to obtain directly, so we usually find \(e_y(t)\) to obtain e(t) according to the equation \(e_y(t)=Ce(t).\)
3.4 \(H_{\infty }\) performance control of T-S singular FOS
The control problem of continuous time T-S fuzzy SFOSs with \(H_{\infty }\) performance is considered in this section.
Definition 3
[31] The \(T_{wz}\) is defined as the transfer function of the system (3) in the following form:
Then, in frequency domain, the \(H_{\infty }\) norm is defined as follows:
Theorem 3
Continuous time T-S singular FOS (10) is asymptotically stable with fractional order belonging \(0<\alpha <1 \) and \(\Vert T_{wz}\Vert _{\infty }<\gamma ,\) if there exists matrices \(P_{1i}>0,P_{2i}>0,Z_{1i}>0, Z_{2i}>0\) and a scalar \(\beta >0\) such that (15) and the follow LMIs satisfied:
where \({\bar{A}}_{h}\) is consistent with Theorem 1, and
Proof
Substituting \({\bar{A}}_{h},{\bar{C}}_{h}, Z, {\bar{D}}, P, \varLambda \) into (25), it obtains that:
where
due to the inequality (27), it obtains that: \(\bigvee <0,\) which is expressed in (29), \(\bigvee =\)
then,
Since the continuous time system (10) is admissibile, pre- and post-multiplying (31) by \(B^T_{i}(s^{\alpha }E-{\bar{A}}_{i})^{-T}\) and its transform, respectively, we have that,
where \(\gamma ^2 I>0.\) Then, the above inequality can be converted into
From lemma 3 and substitute \(\varPsi ,\varOmega ,\) we have that:
where
Further, \(\varUpsilon >0,\) it means that \(\Vert T_{wz}\Vert _{\infty }<\gamma .\) The proof of the theorem has been completed.
Theorem 4
Continuous time T-S singular fractional order system (10) is output-feedback stabilizable if there exists matrices \( P_{1i}>0, P_{2i}>0,\) and \(Z_{ji}(j=1,2,...,6), Q_{ji}(j=1,2,...,8), J, M, N, \mathcal {K }\) are constant matrices and a scalar \( \beta >0 \) such that (15) and the LMI (34), which is at the top of next page, satisfied:
where
Theorem 4 can be regarded as the extension of Theorem 3, so the proof is not expressed in detail.

4 Simulation results
Numerical examples are given to show the validity of the above approach in this section.
Example 1
The following fuzzy singular fractional order systems are considered with two fuzzy rules and the parameter matrices are described as follows.
where
As a result of Theorem 3, to solve the inequalities (15) and (25), it obtains that the following solution:

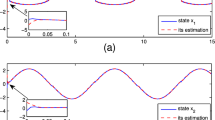
(a) \(x_1(t)\) and the error estimation of \(x_1(t)\)(b) \(x_2(t)\) and the error estimation of \(x_2(t)\)(c) \(x_3(t)\) and the error estimation of \(x_3(t)\)(d) State trajectories of error dynamic system (8)

The controllers \(\nu _1(t)\) and \(\nu _2(t)\) in Example 1

The adaptive parameters in Example 1
Figures 1a–c shows \(x_{i}(t)(i=1,2,3)\) can be estimated and tracked accurately under observer-based adaptive fault-tolerant controller, whose curves are depicted in Fig. 2. After that, under the effect of the adaptive parameters, which is shown in Fig. 3, we get that the error system in Fig. 1d converges to zero, so that dynamic system (35) is asymptotically stable and Theorem 3 is valid.
Example 2
Considering electrical circuit shown in Fig. 5, which are widely used, including the following circuit element, a load resistance R, source voltage \(e_1, e_2,\) and capacitances \(C_1, C_2, C_3.\) Then, the circuit symbols are given , \(u_{1}(t), u_{2}(t), u_{3}(t)\) represent the voltage of capacitances, respectively. Afterwards, the state equation is given as follows,
where \(\alpha =0.25,\) \(C_1=C_2=C_3=1,\) \(R=1,\) \( f_{a}(t)= {\left\{ \begin{array}{ll} 0,&{} {t<2}\\ \frac{1}{sin(0.5t-5)},&{} {t\ge 2}, \end{array}\right. }\ \)
Due to Theorem 2 and solving inequalities (15) and (16), it obtains a series of feasible solutions as follows:

Electrical circuit illustration in Example 2


The adaptive parameters in Example 2
Further, Fig. 6 shows that the error dynamic system (10) is asymptotically stable and the designed adaptive controller (8) with the adaptive parameters shown in Fig. 7, which means that the state variables of T-S fuzzy SFOSs are tracked precisely with actuator faults.
Remark 3
Through the above table, We extend the stability of the SFOS to fuzzy T-S systems. Compared with [15], our approach is easy to solve. We reduce the conservative for stabilization and own practical applications. [9] constructed a sliding surface with reduced dimension by the method of state transformation but increases the computational burden. In general, our result is better and stronger than the existing results.
5 Conclusion
This paper deals with the issue of adaptive control of T-S singular FOSs with faults and \(H_{\infty }\) performance, where the fractional order belongs to (0, 1). Firstly, according to adaptive laws and fuzzy approximation technology, an adaptive observer has been given to dedicate to guarantee the preset tracking performance, which keep the estimation of the unmeasurable or partially measurable state and faults, simultaneously. Secondly, a controller has been designed through constructing the sliding mode surface of fuzzy singular fractional order systems with adaptive sliding mode control strategy. Moreover, a convex combination technique has been developed, such that it is shown that the proposed approach is valid for the systems with faults and unknown disturbances. Further, in order to ensure the stability of the proposed system with \(H_{\infty }\) performance, novel sufficient conditions have been obtained by LMIs, Finally, to illustrate the availability of the presented method, numerical simulation and practical examples have been presented.
References
Cai L, Thornhill F, Pal C (2017) Multivariate detection of power system disturbances based on fourth order moment and singular value decomposition. IEEE Trans Power Syst 32(6):4289–4297
Li L, Zhang Q, Zhu B (2015) Fuzzy stochastic optimal guaranteed cost control of bio-economic singular markovian jump systems. IEEE Trans Cybern 45(11):2512–2521
Wang Y, Xia Y, Shen H, Zhou P (2018) SMC design for robust stabilization of nonlinear markovian jump singular systems. IEEE Trans Autom Control 63(1):219–224
Liang S, Wei Y, Pan J, Wang Y (2015) Bounded real lemmas for fractional order systems. Int J Autom Comput 12(2):192–198
Shen H, Men Y, Wu Z, Park JH (2018) Nonfragile \(\cal{H}_{\infty }\) control for fuzzy markovian jump systems under fast sampling singular perturbation. IEEE Trans Syst Man Cybern Syst 48(12):2058–2069
Xiao X, Park J, Zhou L, Lu G (2019) New results on stability analysis of Markovian switching singular systems. IEEE Trans Autom Control 64(5):2084–2091
Wei Y, Wang J, Liu T, Wang Y (2019) Sufficient and necessary conditions for stabilizing singular fractional order systems with partically measurable state. J Franklin Inst 356(4):1975–1990
Liu H, Pan Y, Li S, Chen Y (2017) Adaptive fuzzy backstepping control of fractional-order nonlinear systems. IEEE Trans Syst Man Cybern Syst 47(8):2209–2217
Zhang X, Huang W, Wang Q (2021) Robust \(H_{\infty }\) adaptive sliding mode fault tolerant control for T-S fuzzy fractional order systems with mismatched disturbances. IEEE Trans Circuits Syst I Regul Papers. https://doi.org/10.1109/TCSI.2020.3039850
Sabatier J, Moze M, Farges C (2010) LMI stability conditions for fractional order systems. Comput Math Appl 59(5):1594–1609
Lu J, Chen Y (2010) Robust stability and stabilization of fractional-order interval systems with the fractional order \(\alpha \): the \( 0 < \alpha < 1\) case. IEEE Trans Autom Control 55(1):152–158
Song S, Zhang B, Xia J, Zhang Z (2020) Adaptive backstepping hybrid fuzzy sliding mode control for uncertain fractional-order nonlinear systems based on finite-time scheme. IEEE Trans Syst Man Cybern Syst 50(4):1559–1569
Pu Y, Yi Z, Zhou J (2017) Fractional Hopfield neural networks: fractional dynamic associative recurrent neural networks. IEEE Trans Neural Netw Learn Syst 28(10):2319–2333
Guo Y, Lin C, Chen B, Wang QG (2018) Stablization for singular fractional order systems via static output feedback. IEEE Access 6:71678–71684
Zhang X, Chen Y (2018) Admissibility and robust stabilization of continous linear singular fractional order systems with fractional order \(\alpha:\) the \(0{<}\alpha {<}1\) case. ISA Trans 82(4):42–50
Zhang Q, Qiao L, Zhu B, Zhang H (2017) Dissipativity analysis and synthesis for a class of T-S fuzzy descriptor systems. IEEE Trans Syst Man Cybern Syst 47(8):1774–1784
Wang L, Lam H-K (2020) Further study on observer design for continuous-time Takagi-Sugeno fuzzy model with unknown premise variables via average dwell time. IEEE Trans Cybern 50(11):4855–4860. https://doi.org/10.1109/TCYB.2019.2933696
Han J, Zhang H, Wang Y, Liu X (2016) Robust state/fault estimation and fault tolerant control for T-S fuzzy systems with sensor and actuator faults. J Franklin Inst 353(2):615–641
Su X, Shi P, Wu L, Song Y (2016) Fault detection filtering for nonlinear switched stochastic systems. IEEE Trans Autom Control 61(5):1310–1315
Zhang H, Qin C, Jiang B, Luo Y (2014) Online adaptive policy learning algorithm for \(h_{\infty }\) state feedback control of unknown affine nonlinear discrete-time systems. IEEE Trans Cybern 44(12):2706–2718
Li R, Zhang X (2020) Adaptive sliding mode observer design for a class T-S descriptor fractional order system. IEEE Trans Fuzzy Syst 28(9)
Asemani MH, Majd VJ (2013) A robust \(H_{\infty }\) observer-based controller design for uncertain T-S fuzzy systems with unknown premise variables via LMI. Fuzzy Sets Syst 212(1):21–40
Zhang H, Liu Y, Wang Y (2021) Observer-based finite-time adaptive fuzzy control for nontriangular nonlinear systems with full-state constraints. IEEE Trans Cybern 51(3):1110–1120. https://doi.org/10.1109/TCYB.2020.2984791
Chen B, Lin C, Liu X, Liu K (2016) Observer-based adaptive fuzzy control for a class of nonlinear delayed systems. IEEE Trans Syst Man Cybern Syst 46(1):27–36
Zhang H, Zhang J, Yang G, Luo Y (2015) Leader-based optimal coordination control for the consensus problem of multiagent differential games via fuzzy adaptive dynamic programming. IEEE Trans Fuzzy Syst 23(1):152–163
Tahoun A, Arefa M (2020) A new unmatched-disturbances compensation and fault-tolerant control for partically known nonlinear singular systems. ISA Trans 104(31):310–320
Zhang H, Liang Y, Su H, Liu C (2020) Event-driven guaranteed cost control design for nonlinear systems with actuator faults via reinforcement learning algorithm. IEEE Transactions on Systems, Man, and Cybernetics: Systems 50(11):4135–4150
Li M, Liu M, Zhang Y (2020) Asynchronous adaptive dynamic output feedback sliding mode control for singular markovian jump systems with actuator faults and uncertain transition rates. Appl Math Comput. https://doi.org/10.1016/j.amc.2019.124958
Chen K, Astolfi A (2021) Adaptive control for systems with time-varying parameters. IEEE Trans Autom Control 66(5):1986–2001
Xu S, Lam J (2006) Roubust control and filering of singular systems. Springer-Verlag, Germany, Berlin
Li Y, Wei Y, Chen Y, Wang Y (2020) A universal framework of the generalized Kalman-Yakubovich-Popov Lemma for singular fractional-order systems. IEEE Trans Syst Man Cybern Syst. https://doi.org/10.1109/TSMC.2019.2945358
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest. All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki Declaration and its later amendments or comparable ethical standards. This article does not contain any studies with animals performed by any of the authors. Informed consent was obtained from all individual.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Yan, Y., Zhang, H., Ming, Z. et al. Observer-based adaptive control and faults estimation for T-S fuzzy singular fractional order systems. Neural Comput & Applic 34, 4265–4275 (2022). https://doi.org/10.1007/s00521-021-06527-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-021-06527-0