
Abstract
This paper focuses on the exponential synchronization of memristor-based recurrent neural networks with multi-proportional delays. Act as a vital mathematical model, the system with proportional delays has been widely popular in several scientific fields, such as biology, physics systems as well as control theory. In the sense of Filippov solutions, we receive a novel sufficient condition based on the theories of set-valued maps and differential inclusions, by constructing a proper Lyapunov functional and taking advantage of inequality techniques. Here, the condition is easy to be verified by algebraic methods. A couple of numerical examples and their simulations are given to illustrate the correctness and effectiveness of the obtained results.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
For the sake of depicting the relationship between electric charge and magnetic flux, Chua [1] in 1971 originally envisaged the existence of the fourth basal circuit element which described as memristor (an abbreviation for memory and resistor). The other three essential circuit components are resistor, inductor and capacitor, respectively. Unfortunately, as the fourth fundamental passive circuit element, memristor was rarely valued by several researchers until the actual memristor device was triumphantly contrived by scientists at Hewlett-Packard Laboratories [2]. Thanks to memristor’s distinctive properties, such as nanometer scale dimensions, nonvolatile memory characteristics, lower power consumption, a alterable resistance known as memristance, and so on [3,4,5], a growing number of researchers have shown solicitude for memristor. Going one step further, scientists have explored memristor’s a number of prospective applications in neuromorphic systems [6], programmable analog circuits [7] and so on. It has been expounded at length that memristor is in a position to regard as synaptic connection weights in artificial neural networks [8], so a great deal of researchers took advantage of memristor to devise a novel model called memristor-based neural networks for the purpose of emulating the human brain. We are convinced that memristor-based neural networks can be widely used in many fields, when their dynamical characteristics are adequately exploited and utilized.
It is generally known that recurrent neural networks have blossomed into very significant nonlinear circuit systems in virtue of their extensive application value and prospect in solving Sylvester equation, computing the Drazin inverse, resolving real-time price problem, dealing with convex optimization problem and so on [9,10,11]. Taking fully into account the wide range of practical applications, numerous scholars were really quite interested in researching memristor-based recurrent neural networks (MRNNs) and have acquired many meaningful results. In reality, MRNNs with time delays have captured considerable attention of more and more scholars and a great deal of valuable achievements have been reported in [12,13,14,15]. The true cause lies in the fact that time delays are universal phenomena in nature as a result of the limited switching speed of amplifiers. In addition, time delays invariably have a marked impact on the dynamic behaviors of neural networks, and even cause various unstable phenomena, such as periodic oscillation, periodic instability, bifurcation and so on. In recent years, scholars have devoted a great deal of effort to investigating the delay-dependent exponential passivity and exponential stability of MRNNs with time-varying delays [12, 13]. Besides that, by constructing appropriate Lyapunov functionals and applying inequality techniques, a lot of sufficient conditions were obtained to ensure the passivity of the MRNNs with discrete and distributed delays in [14]. And Chandrasekar et al. [15] considered the \(\mu \)-stability of MRNNs with leakage time-varying delays by establishing proper Lyapunov-Krasovskii functionals, appropriate inequalities and linear matrix inequalities (LMIs).
As early as 1990, Pecora and Carroll [16] reported that chaotic systems can be synchronized by linking them with identical signals. After the ground-breaking research, a growing number of scholars from diverse scientific domains have extensively studied the synchronization owing to its several latent applications in security [17], image encryption [18], public traffic networks [19], private communications [20], inferring network topologies [21] and so on. Wang et al. [22] analyzed the synchronization conditions of coupled harmonic oscillators utilizing sampled data. And researchers have discussed the synchronization of many networks, containing complex networks, directed complex networks, duplex networks and so on. For example, see [23,24,25] and references therein. In [23], scholars expounded profoundly the synchronization phenomena when oscillating elements are confined to interact in the sophisticated network topology, and its applications from complex networks to diverse disciplines. The lower bounds for the coupling strengths of oscillators in the directed complex networks were given to guarantee the global synchronization in [24]. Li et al. [25] revealed several rules about synchronizability of the duplex networks comprised of two networks. In existent researching files, a lot of synchronization problems have been demonstrated, covering adaptive lag synchronization [26], impulsive synchronization [27], complex function projective synchronization [28], exponential synchronization [29] and so on. Numerous control techniques have been utilized to investigate the synchronization of discussed systems, which contain adaptive control, periodically intermittent control, delayed feedback control and so on. For example, see [30,31,32,33] and references therein. In recent years, the synchronization of MRNNs has aroused widespread concern due to its important significance in theory and practice. Taking into account the impact of time delays, researchers focused on the synchronization of MRNNs with time delays and have reported numerous significant achievements. Exponential synchronization and anti-synchronization, non-fragile \(H_{\infty }\) synchronization of MRNNs with time-varying delays were studied in [34, 35], respectively. In [36], Bao received some sufficient conditions to ensure the adaptive synchronization of fractional-order memristor-based neural networks with time delay, by utilizing the linear delay feedback control, adaptive control as well as a fractional-order inequality. By designing suitable controllers, several sufficient conditions were contained to ensure the finite-time synchronization and fixed-time synchronization of delayed MRNNs in [37, 38], respectively. The exponential synchronization of coupled stochastic memristor-based neural networks with probabilistic time-varying delay coupling and time-varying impulsive delay was investigated in [39]. In view of non-smooth analysis and a feedback controller, numerous sufficient conditions were achieved to guarantee the exponential synchronization of MRNNs with time-varying delays in [40].
In the late years, a new type of unbounded time-varying delay which differs from distributed delay, known as proportional delay, has stimulated scholars’ research interests owing to its important position of many areas, such as electrodynamics [41], dynamics [42], Web quality of service (QoS) routing decision [43] and so on. On the basis of the topological structures and inner parameters of considered neural networks, we lead into the proportional delays, which can make the process of performance analysis more complicated and interesting [44, 45]. It should be pointed out that the QoS routing algorithms in view of neural networks with proportional delays are regarded as the most appropriate algorithms. At the same time, the proportional delay function \(\tau (t)=(1-q)t \rightarrow +\,\infty \) as \(q\ne 1, t\rightarrow +\,\infty \), where q is a constant and meets \(0<q<1\), so it is remarkably facilitate to dominate the operation time in the light of the time delays of discussed neural networks. Therefore it’s of important theory and actual meanings to deal with the dynamic behaviors of neural networks with proportional delays. For example, see [46,47,48,49,50,51] and references therein. On the basis of matrix theories and proper Lyapunov functionals, global exponential stability and asymptotic stability of the equilibrium point of cellular neural networks with multi-proportional delays were studied in [46, 47], respectively. In addition to this, several sufficient conditions ensuring the global exponential periodicity and stability, exponential synchronization of recurrent neural networks with multi-proportional delays were reported in [48, 49], respectively. Nevertheless, it is a significant challenge to establish suitable Lyapunov functionals occasionally, researches try to deal with the problems by some other methods, for instance, by constructing novel delay differential inequalities. By means of constructing proper delay differential inequalities, Zhou [50, 51] investigated the exponential stability of hybrid BAM neural networks and competitive neural networks with proportional delays, respectively. Moreover, in the process of transferring the digital signals, security will be enhanced by means of utilizing synchronization to communication. Up to date, there has never been any results discussing the exponential synchronization of MRNNs with multi-proportional delays in the literature, and this question is challenging and meaningful.
Inspired by the above discussions, this paper researches the exponential synchronization of MRNNs with multi-proportional delays. In the sense of Filippov solutions, we manage to obtain a novel sufficient condition to ensure the exponential synchronization of considered systems via a feedback control, theories of set-valued maps and differential inclusions, proper Lyapunov functional method and inequality techniques. Moreover, two numerical examples and their simulations are given to clarify the improvement and advantages of the derived theoretical results in comparison with some existing results.
The rest of this paper is proposed as follows. Models and preliminaries are presented in Sect. 2. A sufficient condition is obtained in Sect. 3 for the exponential synchronization of MRNNs with multi-proportional delays. Section 4 presents two numerical examples and their simulations. Conclusions are exhibited in Sect. 5.
2 Model description and preliminaries
Consider the following class of MRNNs with multi-proportional delays:
for \(i=1,2,\dots ,n\). where \(n\ge 2\) represents the number of neurons. \(x_{i}(t)\) is the voltage of the capacitor \(C_{i}\). \(d_{i}({x_{i}(t)})\) is the \(i{\text {th}}\) neuron self-inhibitions at time t. \(a_{ij}({x_{j}(t)}), b_{ij}({x_{j}(p_{j}t)})\) and \(c_{ij}({x_{j}(q_{j}t)})\) are memristor-based connection weights. \(f_{j},g_{j}\) and \(h_{j}: {\mathbb {R}}\rightarrow {\mathbb {R}}\) denote the nonlinear activation functions. \(I_{i}\) is an external constant input. \(p_{j}\) and \(q_{j}, j=1,2,\dots ,n\) are proportional delay factors and satisfy \(0<p_{j},q_{j}\le 1, q=\min \nolimits _{1\le j\le n}\{p_{j},q_{j}\}\), and \(p_{j}t=t-(1-p_{j})t, q_{j}t=t-(1-q_{j})t\), where \((1-p_{j})t\) and \((1-q_{j})t\) are the transmission delay functions, and \((1-p_{j})t\rightarrow +\,\infty , (1-q_{j})t\rightarrow +\,\infty \) as \(p_{j}, q_{j}\ne 1, t\rightarrow +\,\infty \). \(\varphi _{i}(t), t\in [q,1], i=1,2,\dots ,n\) are the initial values of system (1), \(\Phi =(\varphi _{1}(t),\varphi _{2}(t),\dots ,\varphi _{n}(t))^{\mathrm{T}}\in C([q,1],{\mathbb {R}}^{n})\), and
in which
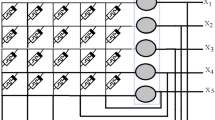
\(R_{i}\) and \(C_{i}\) are the resistor and capacitor, \(\bar{\mathfrak {R}_{i}}=\frac{1}{R_{i}}, i\in N, N=1,2,\dots , n\). \(M_{ij}, N_{ij}\) and \(W_{ij}\) denote the memductances of memristors \(R_{ij}^{*}, R_{ij}^{**}\) and \(R_{ij}^{***}\), respectively. Furthermore, \(R_{ij}^{*}\) denotes the memristor between the neuron activation function \(f_{j}(x_{j}(t))\) and \(x_{i}(t)\). \(R_{ij}^{**}\) stands for the memristor between the neuron activation function \(g_{j}(x_{j}(p_{j}t))\) and \(x_{i}(t)\). \(R_{ij}^{***}\) represents the memristor between the neuron activation function \(h_{j}(x_{j}(q_{j}t))\) and \(x_{i}(t)\). According to the properties of memristor and the previous works, here we take the threshold voltage is zero, then \(d_{i}({x_{i}(t)}), a_{ij}({x_{j}(t)}), b_{ij}({x_{j}(p_{j}t)})\) and \(c_{ij}({x_{j}(q_{j}t)})\) satisfy the following conditions:
where \(d_{i}^{*}>0, d_{i}^{**}>0, i\in N\). For \(i, j\in N, a_{ij}^{*}, a_{ij}^{**}, b_{ij}^{*}, b_{ij}^{**}, c_{ij}^{*}\) and \(c_{ij}^{**}\) are all constants. Before going any further, we bring forward the following condition for the neuron activation functions \(f_{j}(\cdot ), g_{j}(\cdot )\) and \(h_{j}(\cdot )\):
in which \(j=1,2,\dots ,n, \sigma _{j}^{-}, \sigma _{j}^{+}, \gamma _{j}^{-}, \gamma _{j}^{+}, \delta _{j}^{-}\) and \(\delta _{j}^{+}\) are constants, \(f_{j}(\cdot ), g_{j}(\cdot )\) and \(h_{j}(\cdot )\) don’t be asked to be differential, monotonic and nondecreasing throughout this paper.
System (1) is deemed as the drive system, corresponding response system is defined as:
where
and \(u_{i}(t)\) is the state-feedback controller. \(\psi _{i}(t), t\in [q,1], i=1,2,\dots ,n\) are the initial values of response system (3), \(\Psi =(\psi _{1}(t),\psi _{2}(t),\dots ,\psi _{n}(t))^{\mathrm{T}} \in C([q,1],{\mathbb {R}}^{n})\).
Through appropriate transformations: \(y_{i}(t)=x_{i}({\text {e}}^{t}), v_{i}(t)=z_{i}({\text {e}}^{t})\) (see [46]), drive-response systems (1) and (3) are equivalently transformed into the following drive-response systems with multi-constant delays and time-varying coefficients:
and
for \(i=1,2,\dots ,n\). Where \(\tau _{j}=-\log p_{j}\ge 0, \varsigma _{j}=-\log q_{j}\ge 0\), we let \( \tau =\max \nolimits _{1\le j\le n}\{\tau _{j}\}, \varsigma =\max \nolimits _{1\le j\le n}\{\varsigma _{j}\}, \eta =\max \{\tau ,\varsigma \}\). \({\bar{\varphi }}_{i}(t)=\varphi _{i}({\text {e}}^{t}), {\bar{\psi }}_{i}(t)=\psi _{i}({\text {e}}^{t}), {\bar{\Phi }}=({\bar{\varphi }}_{1}(t),{\bar{\varphi }}_{2}(t),\dots ,{\bar{\varphi }}_{n}(t))^{\mathrm{T}} \in C([-\eta ,0],{\mathbb {R}}^{n}), {\bar{\Psi }}=({\bar{\psi }}_{1}(t),{\bar{\psi }}_{2}(t),\dots ,{\bar{\psi }}_{n}(t))^{\mathrm{T}}\in C([-\eta ,0],{\mathbb {R}}^{n}), U_{i}(t)=u_{i}({\text {e}}^{t})\), here \(U_{i}(t)\) is an feedback controller and defined as
where \(\rho _{i}\) is a constant for all \(i\in N\), which represents the control gain.
Remark 1
Drive-response systems (1) and (3) are equivalent to drive-response systems (4) and (5). Accordingly, for the sake of researching the exponential synchronization of drive-response systems (1) and (3), we can research the exponential synchronization of drive-response systems (4) and (5).
From the view of mathematics, memristor-based differential equations obey Bernoulli’s nonlinear differential equations (see [33]), and drive-response systems (4) and (5) are discontinuous systems. In this case, the solutions of (4) and (5) are considered in Filippov’s sense, we recommend several definitions and lemmas.
Definition 1
[14] Let E \(\subset {\mathbb {R}}^{n}\), then \(\chi \mapsto G(\chi )\) is called a set-valued map from \(E\hookrightarrow {\mathbb {R}}^{n}\), if there is a nonempty set \(G(\chi )\subset {\mathbb {R}}^{n}\) for each point \(\chi \) of a set \(E\subset {\mathbb {R}}^{n}\). A set-valued map G with nonempty values is described as upper-semi-continuous at \(\chi _{0}\in E\subset {\mathbb {R}}^{n}\), if for any open set N containing \(G(\chi _{0})\), there exists a neighborhood M of \(\chi _{0}\) such that \(G(M)\subset N\). \(G(\chi )\) is said to have a closed (convex, compact) image if to each \(\chi \in E, G(\chi )\) is closed (convex, compact).
Definition 2
[52] For the following differential system \({\dot{\chi }}(t)=g(t,\chi )\), in which \(g(t,\chi )\) is discontinuous at \(\chi \in {\mathbb {R}}^{n}\). The set-valued map is described as
where \({\mathrm{co}}[\cdot ]\) denotes the closure of the convex hull. \(B(\chi ,\varrho )\) is the ball of center \(\chi \) and radius \(\varrho \). \(\mu (N)\) is Lebesgue measure of set N. A vector-value function \(\chi (t)\) which defined on a non-degenerate interval \(I \subseteq R\) is addressed as a Filippov solution of this system, if \(\chi (t)\) is an absolutely continuous function on any subinterval \([t_{1}, t_{2}]\) of I, and for almost all \(t\in I, \chi (t)\) fulfills the differential inclusion \({\dot{\chi }}(t)\in G(t,\chi )\).
According to Definitions 1 and 2, drive-response systems (4) and (5) can be written as:
and
where
Then, we give the definition of the synchronization error \(w(t):w(t)=(w_{1}(t),w_{2}(t),\dots ,w_{n}(t))^{\mathrm{T}}\), where \(w_{i}(t)=v_{i}(t)-y_{i}(t)\). By using Definitions 1 and 2, from drive-response systems (4) and (5), we can obtain the following synchronization error system:
Definition 3
[14] A vector-value function \(y(t)=(y_{1}(t), y_{2}(t),\dots , y_{n}(t))^{\mathrm{T}}\) is a solution of drive system (4) with the initial condition \({\bar{\Phi }}=({\bar{\varphi }}_{1}(t), {\bar{\varphi }}_{2}(t), \dots , {\bar{\varphi }}_{n}(t))^{\mathrm{T}}\in C([-\eta ,0],{\mathbb {R}}^{n})\), if y(t) is an absolutely continuous function and satisfies Definition 2.
Lemma 1
[14] If condition (2) holds, then the solutiony(t) of drive system (4) with initial condition\({\bar{\Phi }}=({\bar{\varphi }}_{1}(t), {\bar{\varphi }}_{2}(t),\dots , {\bar{\varphi }}_{n}(t))^{\mathrm{T}}\in C([-\eta ,0],{\mathbb {R}}^{n})\)exists and it can be extended to the interval\([0,+\infty )\).
Lemma 2
[40] If condition (2) holds, then the following inequalities
-
(i)
$$\left\{ {\text {co}}[d_{i}(v_{i}(t))]v_{i}(t)-{\text {co}}[d_{i}(y_{i}(t))]y_{i}(t)\right\} {\text {sgn}}\left( w_{i}(t)\right) \ge D_{i}|w_{i}(t)|,$$
-
(ii)
$$\left| {\text {co}}[a_{ij}({v_{j}(t)})]f_{j}(v_{j}(t))-{\text {co}}[a_{ij}({y_{j}(t)})]f_{j}(y_{j}(t))\right| \le A_{ij}\sigma _{j}|w_{j}(t)|,$$
-
(iii)
$$\left| {\text {co}}[b_{ij}({v_{j}(t-\tau _{j})})]g_{j}(v_{j}(t-\tau _{j}))-{\text {co}}[b_{ij}({y_{j}(t-\tau _{j})})]g_{j}(y_{j}(t-\tau _{j}))\right| \le B_{ij}\gamma _{j}|w_{j}(t-\tau _{j})|,$$
-
(iv)
$$\left| {\text {co}}[c_{ij}({v_{j}(t-\varsigma _{j})})]h_{j}(v_{j}(t-\varsigma _{j}))-{\text {co}}[c_{ij}({y_{j}(t-\varsigma _{j})})]h_{j}(y_{j}(t-\varsigma _{j}))\right| \le C_{ij}\delta _{j}|w_{j}(t-\varsigma _{j})|$$
hold. Where\(\sigma _{j}=\max \{|\sigma _{j}^{-}|,|\sigma _{j}^{+}|\}, \gamma _{j}=\max \{|\gamma _{j}^{-}|,|\gamma _{j}^{+}|\}, \delta _{j}=\max \{|\delta _{j}^{-}|,|\delta _{j}^{+}|\}, i,j\in N\).
Definition 4
[40] For \(\forall \,t\ge 0\), drive-response systems (4) and (5) are said to be exponentially synchronized if there exist constants \(M>1\) and \(\kappa >0\) such that
holds, in which \(\kappa \) is described as degree of exponential synchronization.
Notations Solutions of all the considered systems are intended in Filippov’s sense in the whole paper. \({\mathbb {R}}^{n}\) and \({\mathbb {R}}^{n\times m}\) denote the n-dimensional Euclidean space and the space of \(n\times m\) real matrices, respectively. \(C([q,1],{\mathbb {R}}^{n})\) and \(C([-\eta ,0],{\mathbb {R}}^{n})\) denote the set of all functions \(\varphi :[q,1] \rightarrow {\mathbb {R}}^{n}\) and \(\psi :[-\eta ,0] \rightarrow {\mathbb {R}}^{n}\) such that \(\varphi \) and \(\psi \) are continuously differential and bounded, respectively. Let \(K=(k_{ij})_{n\times n} \in {\mathbb {R}}^{n\times n}\) stands for real square matrix. For any \(h=(h_{1},h_{2},\dots ,h_{n})\in {\mathbb {R}}^{n}\), the norm is defined by \(\Vert h\Vert =(\sum \nolimits _{i=1}^{n}|h_{i}|^{p})^{\frac{1}{p}}\), where \(p\ge 1\) is a positive integer. We define \(\Vert {\bar{\Phi }}\Vert =\sup _{-\eta \le t\le 0}[\sum \nolimits _{i=1}^{n}|{\bar{\varphi }}_{i}(t)|^{p}]^{\frac{1}{p}}\), for \(\forall \,{\bar{\Phi }}=({\bar{\varphi }}_{1}(t),{\bar{\varphi }}_{2}(t),\dots ,{\bar{\varphi }}_{n}(t))^{\mathrm{T}}\in C([-\eta ,0],{\mathbb {R}}^{n})\). \({\text {co}}\{{\underline{\xi }}_{i},{\bar{\xi }}_{i}\}\) represents the convex hull of \(\{{\underline{\xi }}_{i},{\bar{\xi }}_{i}\}\). For a continuous function \(p(t): {\mathbb {R}}\rightarrow {\mathbb {R}}, D^{+}p(t)\) is called to be the upper right dini derivative and defined as \(D^{+}p(t)=\lim _{h\rightarrow 0^{+}}\frac{1}{h}(p(t+h)-p(t))\). Let \(D_{i}={\mathrm {min}}\{d_{i}^{*},d_{i}^{**}\}, A_{ij}={\mathrm {max}}\{|a_{ij}^{*}|,|a_{ij}^{**}|\}, B_{ij}={\mathrm {max}}\{|b_{ij}^{*}|, |b_{ij}^{**}|\}, C_{ij}={\mathrm {max}}\{|c_{ij}^{*}|,|c_{ij}^{**}|\}\).
3 Main results
Theorem 1
Under condition (2), if there exist constants\(\alpha _{i}>0\)and\(p>1,\)such that
holds for\(i,j=1,2,\dots ,n,\)then drive-response systems (4) and (5) are exponentially synchronized with control input (6).
Proof
For \(i,j=1,2,\dots ,n\), we can choose a small \(\varepsilon >\frac{1}{p}\) such that
Consider the following Lyapunov functional
Under condition (2), by calculating the upper right derivation \(D^{+}V(t)\) of V(t) along system (9), we obtain
It follows from Lemma 2 and (13) that
by using Young inequality \(ab\le \frac{1}{\beta _{1}}a^{\beta _{1}}+\frac{1}{\beta _{2}}b^{\beta _{2}}\), where \(a, b>0, \beta _{1}>1, \frac{1}{\beta _{1}}+\frac{1}{\beta _{2}}=1\), we get
which together with (11), we obtain
thus, \(V(t)\le V(0)\). Since
where \(\gamma =\max \nolimits _{1\le i\le n}\{\gamma _{i}\}, \delta =\max \nolimits _{1\le i\le n}\{\delta _{i}\}\). And from (12), for \(t\ge 0\), we have
It follows from (15)–(17) that
where \(\kappa =\frac{p\varepsilon -1}{p},\)
this is to say,
From Definition 4, we derive that drive-response systems (4) and (5) are exponentially synchronized with control input (6). The proof of Theorem 1 is completed. \(\square \)
Now, basing on 2-norm, we present the following Corollary.
Corollary 1
Under condition (2), if there exists constant\(\alpha _{i}>0\), such that
holds, then drive-response systems (4) and (5) are exponentially synchronized with control input (6), where\(i,j=1,2,\dots ,n.\)
Remark 2
Drive-response systems (4) and (5) are distinct from the drive-response systems in [40]. The coefficients in [40] are bounding time-varying, while the coefficients in this paper are unbound time-varying as a result of containing \({\text {e}}^{t}\), so the exponential synchronization results in [40] cannot be straightly applied to drive-response systems (4) and (5).
Remark 3
If \(p_{j}=q_{j}=1\), drive-response systems (1) and (3) become the following drive-response systems
and
where \(t\ge 1, l_{ij}({x_{j}(t)})=a_{ij}({x_{j}(t)})+b_{ij}({x_{j}(t)})+c_{ij}({x_{j}(t)}), l_{ij}({z_{j}(t)})=a_{ij}({z_{j}(t)})+b_{ij}({z_{j}(t)})+ c_{ij}({z_{j}(t)}), f_{j}(x_{j}(t))=g_{j}(x_{j}(t))=h_{j}(x_{j}(t)), i,j=1,2,\dots ,n\).
Above drive-response systems are MRNNs without delays, the result in this paper is equally true of above drive-response systems.
4 Numerical example
In this section, we will present two numerical examples and their simulations to clarify that the obtained conclusion is correct.
Example 1
Consider two-dimensional MRNNs with multi-proportional delays:
where
and \(I=(0,0)^{\mathrm{T}}, f_{i}(x_{i})=\tanh (x_{i}), g_{i}(x_{i})=\frac{1}{2}\tanh (x_{i}), h_{i}(x_{i})=\frac{1}{4}(|x_{i}+1|-|x_{i}-1|), i=1,2\). The drive system (19) satisfies condition (2) and \(\sigma _{i}=1, \gamma _{i}=\frac{1}{2}, \delta _{i}=\frac{1}{2}, i=1,2\). For the sake of achieving exponential synchronization, the responding response system is devised as
The control inputs are defined as \(u_{i}(t)=\rho _{i}e_{i}(t)\), in which \(e_{i}(t)=z_{i}(t)-x_{i}(t), i=1,2\), representing the synchronization error, here we take \(\rho _{1}=-16.9, \rho _{2}=-10.9\). Through calculating, we get


The time response curve of synchronization error \(e_{i}(t)\)
Furthermore, let \(\alpha _{1}=1, \alpha _{2}=2\), we obtain
The condition of Theorem 1 and Corollary 1 is satisfied. Thus, drive-response systems (19) and (20) are exponentially synchronized, their simulations are shown in Figs. 1 and 2. Figure 1a depicts the chaotic behavior of drive system (19) in phase space with initial value \(x(t)=[-\,20,0.5]^{\mathrm{T}}\). Without control input, Fig. 1b shows the chaotic behavior of response system (20) in phase space with initial value \(z(t)=[20,2.5]^{\mathrm{T}}\). Figure 1c displays the chaotic behavior of response system (20) in phase space with initial value \(z(t)=[20,2.5]^{\mathrm{T}}\). Figure 2 describes the time response curve of synchronization error \(e_{i}(t)\) between drive-response systems (19) and (20) with initial conditions \(x(t)=[-\,20,0.5]^{\mathrm{T}}\) and \(z(t)=[20,2.5]^{\mathrm{T}}\), respectively.
Example 2
Consider three-dimensional MRNNs with multi-proportional delays:
where
and \(I=(0,0,0)^{\mathrm{T}},\, f_{i}(x_{i})=\sin (x_{i}), g_{i}(x_{i})=\frac{1}{\pi }\arctan (\frac{\pi }{2}x_{i}), h_{i}(x_{i})=\tanh (\frac{1}{4}x_{i}) +\frac{1}{4}x_{i}, i=1,2,3\). The drive system (21) satisfies condition (2) and \(\sigma _{i}=1, \gamma _{i}=\frac{1}{2}, \delta _{i}=\frac{1}{2}, i=1,2,3\), and the responding response system is
Taking the control inputs \(u_{i}(t)=\rho _{i}e_{i}(t), i=1,2,3\), in which \(\rho _{1}=-\,18.7, \rho _{2}=-\,10.5, \rho _{3}=-\,24.1\). Through calculating, we obtain

In addition, let \(\alpha _{1}=\alpha _{2}=\alpha _{3}=2\), we get

The time response curve of synchronization error \(e_{i}(t)\)
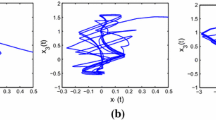
The condition of Theorem 1 and Corollary 1 is satisfied. Obviously, drive-response systems (21) and (22) are exponentially synchronized, their simulations are shown in Figs. 3 and 4. Figure 3a depicts the chaotic behavior of drive system (21) in phase space with initial value \(x(t)=[5,1,1.5]^{\mathrm{T}}\). Figure 3b shows the chaotic behavior of response system (22) in phase space without control input with initial value \( z(t)=[10,0,1.5]^{\mathrm{T}}\). Figure 3c shows the chaotic behavior of response system (22) in phase space with initial value \(z(t)=[10,0,1.5]^{\mathrm{T}}\). Figure 4 describes the time response curve of synchronization error \(e_{i}(t)\) between drive-response systems (21) and (22) with initial conditions \(x(t)=[5,1,1.5]^{\mathrm{T}}\) and \(z(t)=[10,0,1.5]^{\mathrm{T}}\), respectively.
Remark 4
The change of memductances \(M_{ij}, N_{ij}, W_{ij}\) will lead to the change of \(d_{i}(x_{i}(t))\), yet the scholars only reflected on \(d_{i}(x_{i}(t))=d_{i}>0, i\in N\) in the literatures [37, 38]. So, the conclusions in this paper are more general than [37, 38].
5 Conclusions
The exponential synchronization of MRNNs with multi-proportional delays is investigated via a feedback control. The nonlinear transformations change the problem of unbounded time delays into bounded time delays, which can make the problem easier. However, the time-varying coefficients are asked to be bounded in the prior literatures, so how to research the unbounded coefficients becomes the key challenge. In this paper, by constructing a suitable Lyapunov functional and utilizing inequality analysis techniques, a fresh sufficient condition is received for the exponential synchronization of the drive-response systems. We can also apply the research methods here to deal with the stability, passivity and anti-synchronization of MRNNs with multi-proportional delays in the future.
References
Chua L (1971) Memristor-the missing circuit element. IEEE Trans Circuit Theory 18(5):507–519
Strukov D, Snider G, Stewart D, Williams R (2008) The missing memristor found. Nature 453(7191):80–83
Zhang C, Shang J, Xue W, Tan H (2016) Convertible resistive switching characteristics between memory switching and threshold switching in a single ferritin-based memristor. Chem Commun 52(26):4828–4831
Cho K, Lee S, Eshraghian K (2015) Memristor-CMOS logic and digital computational components. Microelectron J 46(3):214–220
Sun Z, Chen X, Zhang Y, Li H, Chen Y (2012) Nonvolatile memories as the data storage system for implantable ECG recorder. ACM J Emerg Technol Comput Syst 8(2):1–16
Jo S, Chang T, Ebong I, Bhadviya B (2010) Nanoscale memristor device as synapse in neuromorphic systems. Nano Lett 10(4):1297–1301
Shin S, Kim K, Kang S (2011) Memristor applications for programmable analog ICs. IEEE Trans Nanotechnol 10(2):266–274
Adhikari S, Yang C, Kim H, Chua L (2012) Memristor bridge synapse-based neural network and its learning. IEEE Trans Neural Netw Learn Syst 23(9):1426–1435
Shen Y, Miao P, Huang Y, Shen Y (2015) Finite-time stability and its application for solving time-varying Sylvester equation by recurrent neural network. Neural Process Lett 42(3):763–784
Stanimirovic P, Zivkovic I, Wei Y (2015) Recurrent neural network for computing the Drazin inverse. IEEE Trans Neural Netw Learn Syst 26(11):2830–2843
Qin S, Xue X (2015) A two-layer recurrent neural network for nonsmooth convex optimization problems. IEEE Trans Neural Netw Learn Syst 26(6):1149–1160
Wen S, Zeng Z, Huang T, Chen Y (2013) Passivity analysis of memristor-based recurrent neural networks with time-varying delays. J Frankl Inst 350(8):2354–2370
Wang H, Duan S, Li C, Wang L, Huang T (2017) Exponential stability analysis of delayed memristor-based recurrent neural networks with impulse effects. Neural Comput Appl 28(4):669–678
Zhang G, Shen Y, Yin Q, Sun J (2015) Passivity analysis for memristor-based recurrent neural networks with discrete and distributed delays. Neural Netw 61(1):49–58
Chandrasekar A, Rakkiyappan R, Li X (2016) Effects of bounded and unbounded leakage time-varying delays in memristor-based recurrent neural networks with different memductance functions. Neurocomputing 202(16):67–83
Pecora L, Carroll T (1990) Synchronization in chaotic systems. Phys Rev Lett 64(8):821–824
Wang Q, Yu S, Li C, Lü J, Fang X (2016) Theoretical design and FPGA-based implementation of higher-dimensional digital chaotic systems. IEEE Trans Circuits I Regul Pap 63(3):401–412
Wen S, Zeng Z, Huang T, Meng Q, Yao W (2015) Lag synchronization of switched neural networks via neural activation function and applications in image encryption. IEEE Trans Neural Netw Learn Syst 26(7):1493–1502
Du W, Zhang J, Li Y, Qin S (2016) Synchronization between different networks with time-varying delay and its application in bilayer coupled public traffic network. Math Probl Eng 2016(2):1–11
Garzagonzalez E, Posadascastillo C, Rodriguezlinan A, Hernandez C (2016) Chaotic synchronization of irregular complex network with hysteretic circuit-like oscillators in hamiltonian form and its application in private communications. Rev Mex Fis 62(1):51–59
Wu X, Zhao X, Lü J, Tang L, Lu J (2016) Identifying topologies of complex dynamical networks with stochastic perturbations. IEEE Trans Control Netw Syst 3(4):379–389
Wang J, Feng J, Xu C, Chen Michael ZQ, Zhao Y, Feng J (2016) The synchronization of instantaneously coupled harmonic oscillators using sampled data with measurement noise. Automatica 66:155–162
Arenas A, Diaz-Guilera A, Kurths J, Moreno Y, Zhou C (2008) Synchronization in complex networks. Phys Rep 469(3):93–153
Liu H, Cao M, Wu C, Lu J, Tse C (2015) Synchronization in directed complex networks using graph comparison tools. IEEE Trans Circuits I Regul Pap 62(4):1185–1194
Li Y, Wu X, Lu J, Lü J (2016) Synchronizability of duplex networks. IEEE Trans Circuits II Express Briefs 63(2):206–210
Yang X, Cao J, Long Y, Rui W (2010) Adaptive lag synchronization for competitive neural networks with mixed delays and uncertain hybrid perturbations. IEEE Trans Neural Netw 21(10):1656–1667
Chen W, Lu X, Zheng W (2015) Impulsive stabilization and impulsive synchronization of discrete-time delayed neural networks. IEEE Trans Neural Netw Learn Syst 26(4):734–748
Han M, Zhang Y (2016) Complex function projective synchronization in drive-response complex-variable dynamical networks with coupling time delays. J Frankl Inst 353(8):1742–1758
Zhou W, Zhou X, Yang J, Liu Y, Zhang X, Ding X (2016) Exponential synchronization for stochastic neural networks driven by fractional Brownian motion. J Frankl Inst 353(8):1689–1712
Tong D, Zhang L, Zhou W, Zhou J, Xu Y (2016) Asymptotical synchronization for delayed stochastic neural networks with uncertainty via adaptive control. Int J Control Autom 14(3):706–712
Gan Q, Lv T, Fu Z (2016) Synchronization criteria for generalized reaction-diffusion neural networks via periodically intermittent control. Chaos 26(4):1–11
Hu C, Yu J, Jiang H (2014) Finite-time synchronization of delayed neural networks with Cohen–Grossberg type based on delayed feedback control. Neurocomputing 143(16):90–96
Li N, Cao J (2015) New synchronization criteria for memristor-based networks: adaptive control and feedback control schemes. Neural Netw 61:1–9
Bao H, Park JH, Cao J (2015) Matrix measure strategies for exponential synchronization and anti-synchronization of memristor-based neural networks with time-varying delays. Appl Math Comput 270:543–556
Mathiyalagan K, Anbuvithya R, Sakthivel R, Park JH, Prakash P (2016) Non-fragile \(H_{\infty }\) synchronization of memristor-based neural networks using passivity theory. Neural Netw 74:85–100
Bao H, Park JH, Cao J (2015) Adaptive synchronization of fractional-order memristor-based neural networks with time delay. Nonlinear Dyn 82:1343–1354
Gao J, Zhu P, Alsaedi A, Alsaadi F, Hayat T (2017) A new switching control for finite-time synchronization of memristor-based recurrent neural networks. Neural Netw 86:1–9
Cao J, Li R (2017) Fixed-time synchronization of delayed memristor-based recurrent neural networks. Sci China Inform Sci 60(3):1–15
Bao H, Park JH, Cao J (2016) Exponential synchronization of coupled stochastic memristor-based neural networks with time-varying probabilistic delay coupling and impulsive delay. IEEE Trans Neural Netw Learn Syst 27(1):190–201
Zhang G, Hu J, Shen Y (2015) New results on synchronization control of delayed memristive neural networks. Nonlinear Dyn 81(3):1167–1178
Fox L, Mayers D, Ockendon J, Tayler A (1971) On a functional differential equation. IMA J Appl Math 8(3):271–307
Dovrolis C, Stiliadis D, Ramanathan P (1999) Proportional differentiated services: delay differentiation and packet scheduling. Comput Commun Rev 29(4):109–120
Maneyama Y, Kubo R (2014) QoS-aware cyclic sleep control with proportional-derivative controllers for energy-efficient PON systems. IEEE/OSA J Opt Commun Netw 6(11):1048–1058
Zhou L (2016) Delay-dependent exponential stability of recurrent neural networks with Markovian jumping parameters and proportional delays. Neural Comput Appl 28(1):765–773
Zheng C, Li N, Cao J (2015) Matrix measure based stability criteria for high-order neural networks with proportional delay. Neurocomputing 149(3):1149–1154
Zhou L (2013) Delay-dependent exponential stability of cellular neural networks with multi-proportional delays. Neural Process Lett 38(3):347–359
Zhou L, Chen X, Yang Y (2014) Asymptotic stability of cellular neural networks with multiple proportional delays. Appl Math Comput 229(5):457–466
Zhou L, Zhang Y (2016) Global exponential periodicity and stability of recurrent neural networks with multi-proportional delays. ISA Trans 60:89–95
Zhou L (2015) Delay-dependent exponential synchronization of recurrent neural networks with multiple proportional delays. Neural Process Lett 42(3):619–632
Zhou L (2015) Novel global exponential stability criteria for hybrid BAM neural networks with proportional delays. Neurocomputing 161(15):99–106
Zhou L, Zhao Z (2016) Exponential stability of a class of competitive neural networks with multi-proportional delays. Neural Process Lett 44(3):651–663
Filippov A (1988) Differential equations with discontinuous right-hand sides. Kluwer, Dordrecht
Acknowledgements
The work is supported by the National Science Foundation of China (No. 61374009), Project training of backbone teachers in colleges and universities of Tianjin (No. 043-135205GC38).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Su, L., Zhou, L. Exponential synchronization of memristor-based recurrent neural networks with multi-proportional delays. Neural Comput & Applic 31, 7907–7920 (2019). https://doi.org/10.1007/s00521-018-3569-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-018-3569-z