
Abstract
This paper studies the anti-synchronization of a class of stochastic perturbed chaotic delayed neural networks. By employing the Lyapunov functional method combined with the stochastic analysis as well as the feedback control technique, several sufficient conditions are established that guarantee the mean square exponential anti-synchronization of two identical delayed networks with stochastic disturbances. These sufficient conditions, which are expressed in terms of linear matrix inequalities (LMIs), can be solved efficiently by the LMI toolbox in Matlab. Two numerical examples are exploited to demonstrate the feasibility and applicability of the proposed synchronization approaches.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Chaos synchronization has gained considerable attentions since its introduction by Pecora and Carroll [1–3], and many applications have been found in different areas, such as secure communication, human heartbeat regulation, chemical reaction, power systems protection, ecological systems and so on. In recent years, various synchronization phenomena are being reported for coupled chaotic oscillators, such as generalized synchronization [4, 5], phase synchronization [6], lag synchronization [7], and even anti-synchronization (AS) [8, 9, 10, 11]. Anti-synchronization is a noticeable phenomenon that the state vectors of synchronized systems have the same absolute values but opposite signs. Therefore, the sum of two signals can converge to zero when AS appears. Anti-synchronization has many important applications [12, 13]. Using anti-synchronization to lasers, one may generate not only drop-outs of the intensity (as with ordinary low-frequency fluctuations) but also short pulses of high intensity, which offers new ways for generating pulses of special shapes. Using anti-synchronization to communication systems, one may transmit digital signals by the transform between synchronization and anti-synchronization continuously, which will strengthen the security and secrecy.
Although some results on anti-synchronization of chaotic systems have been reported, few authors consider the anti-synchronization problem of stochastic perturbed chaotic delayed neural networks (DNNs). Generally, a chaotic system is a nonlinear deterministic that possesses complex and unpredictable behavior. However, there are some experimental and numerical results showing that noises can affect the synchronization between chaotic systems [14–16]. In real complex networks, the signal transmission could be a noisy process brought on by random fluctuations from the release of probabilistic causes such as neurotransmitters. For example, as a special class of stochastic complex networks, stochastic neural networks have recently attracted renewing research interests, see [17, 18]. In [19], the authors proposed a new anti-synchronization algorithm for a class of neural networks with delays based on the Lyapunov stability theory and the Halanay inequality. But they did not consider the stochastic perturbed chaotic neural networks.
Motivated by the above discussion, our main aim in this paper is to study the exponential anti-synchronization problem for chaotic DNNs with stochastic perturbation based on Lyapunov stability theory. By virtue of the Halanay inequality for stochastic differential equations and the drive-response concept, a time-delay feedback controller is designed to ensure the exponential anti-synchronization of chaotic DNNs with stochastic perturbation, where the derived criteria are expressed in terms of linear matrix inequalities (LMIs).
The rest of this paper is organized as follows. In Sect. 2, problem formulation and preliminaries are given. In Sect. 3, the main results and the realization of exponential anti-synchronization are described. In Sect. 4, two examples are given to show the effectiveness of the obtained conditions. Finally, conclusions are given in Sect. 5.
2 Problem formulation and preliminaries
In this paper, we consider a class of delayed neural networks of the form
where i = 1, 2,…, n; x i denotes the state variable associated with ith neuron. In compact matrix form, (1) can be rewritten as
where \(x(t)=[x_{1}(t),x_{2}(t),\ldots,x_{n}(t)]^{\rm {T}}\in {{\mathbb{R}}}^n\) is the state vector of the neural networks at time t; C = diag{c 1, c 2,…, c n } > 0 represents the rate with which the ith unit will reset its potential to the resting state in isolation when disconnection from the network and the external inputs; A = (a ij ) n× n , \(B=(b_{ij})_{n\times n}\in {{\mathbb{R}}}^{n\times n}\) represent the connect weight matrix and the delayed connection weight matrix, namely a ij , b ij denote the strengths of connectivity between the cell i and j at time t and at time t − τ respectively; the activation function \(\widetilde{f}(x(t))=[\widetilde{f}_{1}(x_{1}(t)),\ldots, \widetilde{f}_{n}(x_{n}(t))]^{T},\) \(\widetilde{f}(x(t-\tau))=[\widetilde{f}_{1}(x_{1}(t-\tau)), \ldots, \widetilde{f}_{n}(x_{n}(t-\tau))]^{T}\in {{\mathbb{R}}}^{n}\) describe the manner in which the neurons respond to each other; where τ > 0 is the transmission delay. We know that if the system’s matrices A and B as well as the time delay τ are suitably chosen, system (1) will display a chaotic behavior.
System (1) is considered as drive system. A controlled response system is given by
or
where ω(t) = (ω1(t), ω2(t),…, ω n (t))T is a n-dimensional Brown motion defined on a complete probability space \((\Omega,\,{{\mathcal{F}}},\,{{\mathcal{P}}})\) with a natural filtration \(\{{{\mathcal{F}}}\}_{t \geq 0}\) \(({\rm i.e.}\;{{\mathcal{F}}}_{t}=\sigma\{\omega(s): 0\leq s\leq t\}),\) and \(\sigma: {{\mathbb{R}}}^{+} \times {{\mathbb{R}}}^{n} \times {{\mathbb{R}}}^{n} \to {\mathbb R}^{n\times n},\) \(\sigma=(\sigma_{ij})_{n\times n}\) is the diffusion coefficient matrix; U = [u 1, u 2,…, u n ]T is the state feedback controller given to achieve the anti-synchronization between drive-response system, which can be defined as the function of the state variables of the drive and response neural networks. It can be described as follows
where K 1 and K 2 are the feedback gains to be determined.
Throughout this paper, the following assumptions are made.
Assumption 1
For each i = 1, 2,…, n, there is a constant δ i > 0 such that
Assumption 2
The function σ(t, x, y) satisfies the uniform Lipschitz condition and there exist constant matrices of appropriate dimensions G 1, G 2, for each \((t,x,y)\in {{\mathbb{R}}}\times {{\mathbb{R}}}^{n}\times {{\mathbb{R}}}^{n}, \) such that
Letting e i (t) = x i (t) + y i (t) be the synchronization error, where x i (t) and y i (t) are the ith state variables of drive system (2) and response system (4), respectively. We can derive the error dynamical system as follows
where \(e(t)=[e_{1}(t),e_{2}(t),\ldots,e_{n}(t)]^{T}\in {{\mathbb{R}}}^{n},\) and \(f(e(t))=[\widetilde{f}_{1}(x_{1}(t))+\widetilde{f}_{1}(y_{1}(t)), \widetilde{f}_{2}(x_{2}(t))+\widetilde{f}_{2}(y_{2}(t)), \ldots,\widetilde{f}_{n}(x_{n}(t))+\widetilde{f}_{n}(y_{n}(t))]^{T}, f(e(t-\tau))=[\widetilde{f}_{1}(x_{1}(t-\tau))+\widetilde{f}_{1}(y_{1}(t-\tau)), \widetilde{f}_{2}(x_{2}(t-\tau))+\widetilde{f}_{2}(y_{2}(t-\tau)),\ldots,\widetilde{f}_{n}(x_{n}(t-\tau))+\widetilde{f}_{n}(y_{n}(t-\tau))]^{T}.\) The initial condition associated with the system (6) is given in the following form:
for any \( \xi\in L_{{{\mathcal{F}}}_{0}}^{2}([-\tau, 0], {{\mathbb{R}}}^{n}),\) where \(L_{{{\mathcal{F}}}_{0}}^{2}([-\tau, 0], {{\mathbb{R}}}^{n})\) is the family of all \({{\mathcal{F}}}_{0}\)-measurable \({{\mathcal{C}}}([-\tau,0]; {{\mathbb{R}}}^{n})\)-valued random variables satisfying that
and \({{\mathcal{C}}}([-\tau,0]; {{\mathbb{R}}}^{n})\) denotes the family of all continuous \({{\mathbb{R}}}^{n}\) -valued functions ξ(s) on [−τ, 0] with the norm \(\|\xi\|=\sup\limits_{-\tau\leq s\leq 0}|\xi(s)|.\) In fact, if the trivial solution of the controlled error system (6) is exponentially stable in the mean square, then the global exponential anti-synchronization between (2) and (4) can be derived.
Since the activation functions \(\widetilde{f}_i\) of the Hopfield neural networks and the cellular neural networks are odd functions, for each \(x, y\in {{\mathbb{R}}},\) it is easy to have
According to the definition of the function f i , we can derive
Therefore, together with Assumption 2, it follows from [20] that system (6) admits a trivial solution e(t) ≡ 0.
Definition 1
The drive system (2) and the response system (4) are said to be exponentially anti-synchronized if, for a suitably designed feedback controller, there exist constants γ ≥ 1 and λ > 0 such that \(E\{\|e(t)\|^2\}\leq \gamma E\{\|e(0)\|^2\}e^{-\lambda t},\) for any t ≥ 0, and the constant λ is defined as the exponential anti-synchronization rate.
Lemma 1
Under assumptions 1, 2, let e(t) (with e(t) ≡ e(t; t 0, ξ)) be a solution of system (6) and assume that there exists a positive, continuous function V(t, x) (for t ≥ t 0−τ and \(x\in {{\mathbb{R}}}\)) for which there exist positive constants c 1, c 2, such that
when t ≥ t 0−τ and for some constants 0 ≤ β < α,
when t ≥ t 0. Then
where v + ∈ (0, α−β] is the unique positive solution of the equation v = α − βe vτ. Furthermore, the trivial solution of system (6) is globally exponentially stable in the mean square [21].
Lemma 2
The following linear matrix inequality (LMI)
where Q(x) = Q T(x), R(x) = R T(x), and S(x) depends affinely on x, is equivalent to the following condition (Schur Complement [22]):
3 Anti-synchronization of chaotic neural networks
Theorem 1
Under Assumptions 1, 2 and if there exist constants α > β > 0, ε > 0, and the control gain matrices K 1 and K 2 in error dynamical system (6) such that the following matrix inequality
holds, where \(\Xi=2C-2K_1-\epsilon(AA^{T}+BB^{T})-G_{1}^{T}G_{1}-\alpha I, \quad \Updelta=\hbox{diag}(\delta_{1},\delta_{2},\ldots,\delta_{n}),\) then the anti-synchronization of system (2) and system (4) is achieved.
Proof
To derive anti-synchronization criterion, we consider the following Lyapunov functional
By It\(\hat{o}\)’s formula [23], we obtain the following stochastic differential
where \({{\mathcal{L}}}\) is the diffusion operator and
It follows from (7) that
From Assumption 2, it follows that
Then we have
where \(\xi(t)=\left[\begin{array}{l}e(t)\\e(t-\tau)\end{array}\right],\) and
By Lemma 2, the condition (8) is equivalent to Π > 0, which leads to
therefore, we can derive
By taking the mathematical expectation, we have
It follows from Lemma 1 that
which implies that
where γ is the unique positive solution of the equation γ = α − βe γτ. This completes the proof. □
Remark 1
The paper considered noise perturbation when studying the exponential anti-synchronization problem, which reflects more realistic dynamics than the those in [9, 10, 19], where the noise perturbation was ignored. Meanwhile, the time-delay feedback controllers adopted here can tackle more general systems than that in [19]. Moreover, the simulation results given in next section demonstrate the noise-perturbed anti-synchronization phenomena successfully, and they are coincident with the theoretical results well.
Remark 2
In Theorem 1, the time delay feedback controller U and the noise perturbation are considered. If there is no time-delay term in the controller or noise perturbation in system (4), then we can derive the following corollaries.
Corollary 1
Under Assumptions 1, 2 and if there exist constants α > β > 0, ε > 0, and the control gain matrix K 1 such that the following matrix inequality
holds, where \(\Xi=2C-2K_1-\epsilon(AA^{T}+BB^{T})-G_{1}^{T}G_{1}-\alpha I, \Updelta=\hbox{diag}(\delta_{1},\delta_{2},\ldots,\delta_{n}), \) then the anti-synchronization of system (2) and system (4) is achieved.
Corollary 2
Under Assumptions 1, 2 and if there exist constants α > β > 0, ε > 0, and the control gain matrices K 1 and K 2 such that the following matrix inequality
holds, where \(\Xi=2C-2K_1-\epsilon(AA^T+BB^T)-G_{1}^{T}G_{1}-\alpha I,\) Δ = diag(δ1, δ2,…, δ n ), then the anti-synchronization of system (2) and system (4) is achieved.
4 Illustrative examples
In this section, two illustrative examples are provided to show the effectiveness of our results.
Example 1
Consider the stochastically perturbed chaotic delayed neural networks (2) with parameters as follows:
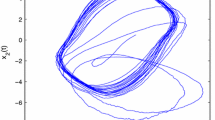
and \(f(x)={\frac{1}{2}}(|x+1|-|x-1|),\) τ = 1; In system (4), let \(\sigma(t,e(t),e(t-\tau)=\left[\begin{array}{ll}{\frac{\sqrt{2}} {2}}e_{1}(t)&0\\ 0&{\frac{\sqrt{2}}{2}}e_{2}(t) \end{array}\right]+\left[\begin{array}{ll}{\frac{\sqrt{2}} {2}}e_{1}(t-\tau)&0\\ 0&{\frac{\sqrt{2}}{2}}e_{2}(t-\tau) \end{array}\right].\) It is obviously Assumptions 1, 2 are satisfied with \(G_{1}=G_2=\left[\begin{array}{ll}1&0\\ 0&1 \end{array}\right],\) \(\delta_1=\delta_2=1.\) By using LMI toolbox, we can solve the inequalities (8) with feasible solutions as follows: α = 13.0258, β = 12.9611, ε = 0.0850, and the control gain matrices \(K_1=\left[\begin{array}{ll}-29.3277 &-1.3281\\ -1.3281 &-12.4049 \end{array}\right],\) \(K_2=\left[\begin{array}{ll}-0.1&0\\ 0 &-0.1 \end{array}\right].\) Therefore, the systems (1) and (2) with above parameters can be exponentially anti-synchronized. It is clear that the networks is actually a chaotic delayed cellular neural networks (DCNNs). Figure 1 shows the chaotic behavior of the system (2) with the initial condition [x 1(s), x 2(s)]T = [0.1, 0.1]T for s ∈ [−1, 0].

a The chaotic behavior of the DCNNs. b The chaotic behavior of the controlled response system. c, d The state response of the error dynamical system
Example 2
Consider the stochastically perturbed Hopfield neural networks (2) with parameters as follows:
and f(x) = tanh(x(t)), τ = 1; In system (4), let \(\sigma(t,e(t),e(t-\tau)=\left[\begin{array}{ll}{\frac{\sqrt{2}} {2}}e_{1}(t)&0\\0&{\frac{\sqrt{2}}{2}}e_{2}(t) \end{array}\right]+\left[ \begin{array}{ll}{\frac{\sqrt{2}}{2}}e_{1}(t-\tau)&0\\ 0&{\frac{\sqrt{2}}{2}}e_{2}(t-\tau) \end{array}\right].\) It is obviously Assumptions 1, 2 are satisfied with \(G_{1}=G_2=\left[\begin{array}{ll} 1&0\\ 0&1 \end{array}\right],\) δ1 = δ2 = 1. By using LMI toolbox, we can solve the inequalities (8) with feasible solutions as follows: α = 6.8564, β = 6.3381, ε = 0.2317, and the control gain matrices \(K_1=\left[\begin{array}{ll}-29.3277 &-1.3281\\ -1.3281 &-12.4049 \end{array}\right],\; K_2=\left[\begin{array}{ll} -0.1&0 \\ 0&-0.1 \end{array}\right].\) Therefore, the systems (1) and (2) with above parameters can be exponentially anti-synchronized. It is clear that the networks is actually a chaotic DCNNs. Figure 2 shows the chaotic behavior of the system (2) with the initial condition \([x_1(s),\; x_2(s)]^T=[0.1,\; 0.1]^T\) for s ∈ [−1, 0].

a The chaotic behavior of the DNNs. b The chaotic behavior of the controlled response system. c, d The state response of the error dynamical system
5 Conclusion
This paper has proposed some new results on a class of stochastic perturbed chaotic delayed neural networks which are seldom considered before. By employing the Lyapunov functional method combined with the stochastic analysis as well as the feedback control technique, several sufficient conditions are established that guarantee the exponentially mean-square anti-synchronization of two identical delayed networks with stochastic disturbances. Numerical simulations have shown the effectiveness of the anti-synchronization scheme.
References
Pecora LM, Carroll TL (1990) Synchronization in chaotic systems. Phys Rev Lett 64(8):821–824
Carroll TL, Pecora LM (1991) Synchronization in chaotic circuits. IEEE Trans Circ Syst 38:453–456
Pecora LM, Carroll TL, Johnson GA (1997) Fundamentals of synchronization in chaotic systems, concepts, and applications. Chaos 7(4):520–543
Kocarev L, Parlitz U (1996) Generalized synchronization, predictability, and equivalence of unidirectionally coupled dynamical systems. Phys Rev Lett 76:1816–1819
Yang SS, Duan K (1998) Generalized synchronization in chaotic systems. Chaos Solitons Fractals 10:1703–1707
Michael GR, Arkady SP, Jürgen K (1996) Phase synchronization of chaotic oscillators. Phys Rev Lett 76:1804–1807
Taherion IS, Lai YC (1999) Observability of lag synchronization of coupled chaotic oscillators. Phys Rev E 59:6247–6250
Zhang Y, Sun J (2004) Chaotic synchronization and anti-synchronization based on suitable separation. Phys Lett A 330:442–447
Li GH (2005) Synchronization and anti-synchronization of colpitts oscillators using active control. Chaos Solitons Fractals 26:87–93
Li GH, Zhou SP (2006) An observer-based anti-synchronization. Chaos Solitons Fractals 29:495–498
Miller DA, Kowalski KL, Lozowski A (1999) Synchronization and anti-synchronization of Chuas oscillators via a piecewise linear coupling Circuit. In: Proceedings fo the 1999 IEEE international symposium on circuit systems, ISCAS99. 5:458–462 (unpublished)
Wedekind I, Parlitz U (2001) Experimental observation of synchronization and anti-synchronization of chaotic low-frequency-fluctuations in external cavity semiconductor lasers. Int J Bifurcation Chaos Appl Sci Eng 11:1141–1147
Kim CM, Rim SW, Key W et al (2003) Anti-synchronization of chaotic oscillators. Phys Lett A 320:39–46
Hu G, Pivka L, Zheleznyak A (1995) Synchronization of a one-dimensional array of Chua’s circuits by feedback control and noise. IEEE Trans Circuits Syst I 42:736–740
Sáchez E, Matías M, Muñuzuri V (1997) Analysis of synchronization of chaotic systems by noise: an experimental study. Phys Rev E 56:4068–4071
Wang M, Hou Z, Xin H (2005) Internal noise-enhanced phase synchronization of coupled chemical chaotic oscillators. J Phys A 38:145–152
Yu WW, Cao JD (2007) Robust control of uncertain stochastic recurrent neural networks with time-varying delay. Neural Process Lett 26(2):101–119
Sun YH, Cao JD, Wang ZD (2007) Exponential synchronization of stochastic perturbed chaotic delayed neural networks. Neurocomputing 70(13–15):2477–2485
Meng J, Wang XY (2007) Robust anti-synchronization of a class of delayed chaotic neural networks. Chaos 17:023113
Friedman A (1976) Stochastic differential equations and applications. Academic Press, New York
Baker C, Buckwar E (2005) Exponential stability in p-th mean of solutions, and of convergent Euler-type solutions, of stochastic delay diffrential equations. J Comput Appl Math 184:404–427
Boyd S, Ghaoui LE, Feron E, Balakrishnan V (1994) Linear matrix inequalities in system and control theory. SIAM, Philadelphia
Arnold L (1974) Stochastic differential equations: theory and applications. Wiley, London
Acknowledgments
This work was jointly supported by the National Natural Science Foundation of China under Grant No. 60874088, the Specialized Research Fund for the Doctoral Program of Higher Education under Grant 20070286003 and the Foundation for Excellent Doctoral Dissertation of Southeast University YBJJ0705.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Ren, F., Cao, J. Anti-synchronization of stochastic perturbed delayed chaotic neural networks. Neural Comput & Applic 18, 515–521 (2009). https://doi.org/10.1007/s00521-009-0251-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-009-0251-5