
Abstract
In the absence of failure data, to use the inaccurate empirical data given by experts to evaluate the reliability of the system, the inaccurate empirical data are regarded as uncertain variables, and the parameters in uncertainty distribution function are also uncertain variables. This paper studies an extreme shock model with dependent competitive failure, both internal natural degradation and external shock can cause system failure, the external shock will cause a sudden increase in the amount of degradation. The degradation process is a linear uncertain process, and the external shock is described by an uncertain renewal reward process. The reliability and the mean time to failure of the system are calculated by employing uncertainty theory. Using micro-electro-mechanical systems (MEMS) as an example, the sensitivity of the system reliability is simulated, and the reliability of the system under uncertain parameters and constants is compared, as well as the reliability of the system under the dependent competitive failure model and the independent competitive failure model.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
A complex system may experience gradual degradation and random external shocks. The gradual degradation and random shocks may be independent or dependent on each other. Anyone who fails first will cause the system to fail, which is called a competitive failure mechanism. Many scholars have studied the situation where gradual degradation and external random shock are independent (Li and Pham 2005; Chien et al. 2006; Weidea et al. 2010). In engineering practice, they are often dependent on each other. Wang and Pham (2012) proposed a more flexible dependence structure using time-varying copulas. Jiang et al. (2012) presented a model for dependent competing failure processes with shifting failure threshold, in which software failure is composed of two parts: the continuous gradual degradation and the sudden increase in the amount of degradation caused by external shock. The shock process affects the critical value of hardware failure, which can be changed. In MEMS, the degradation rate could change due to external shocks (Rafiee et al. 2014). Rafiee et al. (2017) considered the shock process contained fatal shocks and nonfatal shocks, fatal shock could cause hard failure instantaneously, and nonfatal shocks effected on the system in three ways: increasing the degradation threshold, accelerating the degradation rate and reducing the hard failure threshold. Hao et al. (2017) considered the mutual dependence is competing for failure processes, soft failure’s stress effects on hard failure’s strength such as the threshold of the hard failure decreases as the system deteriorates, and hard failure’s stress effects on soft failure’s stress such as an abrupt increase caused by random shocks. Wang et al. (2020a, 2020b) proposed an age-and state-dependent competing risks model and a general discrete degradation model. Gao et al. (2020) studied random jumps exist at the change points of the degradation process based on a Wiener process.
The above articles are all based on the probability theory. In fact, in engineering practice, there are many newly developed products or mature products due to cost, technology and other reasons, their failure data are little, then use probability theory is not appropriate to calculate the distribution function of products lifetime based on the frequency close probability of a large number of samples. In this situation, we often refer to the expert experience data to calculate the uncertainty distribution function of the product lifetime. The uncertainty theory was first established by Liu in 2007a and perfected in 2010b. After more than ten years, uncertainty theory has been effectively used to portray a powerful mathematic tool that considers human cognitive uncertainty. It is widely used in many fields, including uncertain programming (Liu 2009; Ding and Zeng 2018), uncertain risk analysis (Liu 2010a), uncertain differential equation (Yao 2015; Yang et al. 2017), uncertain reliability analysis (Yao and Zhou 2016; Zhang et al. 2018; Liu et al. 2019; Sheng and Ke 2020), uncertain statistics (Yao and Liu 2018; Liu 2019; Yang and Liu 2019; Liu and Yang 2020; Tang 2020) and so on.
For products with few failure data, we can only refer to expert experience data, which is subjective and inaccurate. For such inaccurate data, to better characterize the distribution function of the product lifetime, the inaccurate data are regarded as uncertain variables, parameters in uncertainty distributions as uncertain variables, called by bi-uncertain variables (Liu et al. 2020). To our best knowledge, no scholar has used bi-uncertain variables to describe the competitive failure model so far. Therefore, this paper proposes a dependent competitive failure model with uncertain parameters. Both natural degradation and external shock will lead to system failure. Any external shock will cause a sudden increase in natural degradation. The reliability and the mean time to failure of the system in the extreme shock model is studied under the framework of uncertainty theory.
The main contributions of this paper in theory and practice are as follows: (1) When considering the empirical data of experts with human cognition, the method of uncertainty theory is used; (2) For products without failure data, the life of the product is regarded as a bi-uncertain variable; (3) The time interval of external shock arrival is independent and non-identical uncertain variables, and the parameters in the distribution functions are uncertain variables. (4) The damage caused by external shocks is independent and non-identical uncertain variables, and the parameters in the distribution functions are uncertain variables.
The structure of this paper is as follows: In Sect. 2, a dependent competitive failure model with uncertain parameters is developed. In Sect. 3, the reliability function and mean time to failure of the system are calculated in extreme shock model according to uncertainty theory. To illustrate the established models, the reliability of MEMS is simulated in Sect. 4. Finally, a brief conclusion is made in Sect. 5.
2 System description
2.1 Notation
- \(H\) :
-
The threshold level for software failure.
- \(D\) :
-
The threshold level for hardware failure.
- \(a\) :
-
The initial level of uncertain degradation.
- \(b\) :
-
The uncertain degradation rate.
- \(\xi_{{\text{k}}}\) :
-
The uncertain time interval of the \(k - 1{\text{th}}\) uncertain shock and the \(k{\text{th}}\) uncertain shock.
- \(\eta_{{\text{k}}}\) :
-
The damage size caused by the \(k{\text{th}}\) uncertain shock.
- \(X(t)\) :
-
The amount of continuous degradation at time \(t\).
- \(X_{{\text{s}}} (t)\) :
-
The total degradation due to continuous degradation and shock degradation at time \(t\).
- \(N(t)\) :
-
Number of uncertain shocks that have arrived by time \(t\).
- \(\varphi_{{\text{k}}} (\lambda_{{{\text{k}}1}} ,\lambda_{{{\text{k}}2}} , \ldots ,\lambda_{{kn_{{\text{k}}} }} ;x)\) :
-
The uncertainty distribution of the uncertain time interval \(\xi_{{\text{k}}}\).
- \(\phi_{{\text{k}}} (\mu_{{{\text{k}}1}} ,\mu_{{{\text{k}}2}} , \ldots ,\mu_{{{\text{k}}n_{k} }} ;x)\) :
-
The uncertainty distribution of the uncertain shock \(\eta_{{\text{k}}}\).
- \(\Lambda_{{{\text{ij}}}} (\theta_{{{\text{i}}1}} ,\theta_{{{\text{i}}2}} , \ldots ,\theta_{{{\text{im}}_{i} }} ;x)\) :
-
The uncertainty distribution of the uncertain variable \(\lambda_{{{\text{ij}}}}\).
- \(\Upsilon_{{{\text{ij}}}} (\omega_{{{\text{i}}1}} ,\omega_{{{\text{i}}2}} , \ldots ,\omega_{{{\text{im}}_{{\text{i}}} }} ;x)\) :
-
The uncertainty distribution of the uncertain variable \(\mu_{{{\text{ij}}}}\).
- \(\theta_{ij}\) :
-
Parameters in the uncertainty distribution \(\Lambda_{{{\text{ij}}}}\) of uncertain variable \(\lambda_{{{\text{ij}}}}\).
- \(\omega_{{{\text{ij}}}}\) :
-
Parameters in the uncertainty distribution \(\Upsilon_{{{\text{ij}}}}\) of uncertain variable \(\mu {}_{{{\text{ij}}}}\).
- \(\gamma_{a} (a_{1} ,a_{2} , \ldots ,a_{s} ;x)\) :
-
The uncertainty distribution of the initial level of uncertain degradation \(a\).
- \(\gamma_{{\text{b}}} (b_{1} ,b_{2} , \ldots ,b_{l} ;x)\) :
-
The uncertainty distribution of the uncertain degradation rate \(b\).
- \(\gamma_{{a_{i} }}^{ - 1} (\alpha )\) :
-
The inverse uncertainty distribution of uncertain variable \(a_{{\text{i}}}\).
- \(\gamma_{{b_{i} }}^{ - 1} (\alpha )\) :
-
The inverse uncertainty distribution of uncertain variable \(b_{{\text{i}}}\).
- \(\psi^{ - 1} (\alpha )\) :
-
The inverse uncertainty distribution of uncertain variable \(\sum\limits_{i = 1}^{k + 1} {\xi_{i} }\).
- \(\Psi^{ - 1} (\alpha )\) :
-
The inverse uncertainty distribution of uncertain variable \(\sum\limits_{i = 1}^{k} {\eta_{i} }\).
- \(R(t)\) :
-
Reliability function by time \(t\).
- \(NHF_{t}\) :
-
The hardware failure does not occur by time \(t\).
- \(NSF_{t}\) :
-
The software failure does not occur by time \(t\).
2.2 Preliminaries
Here we introduce some definitions and results of uncertainty theory, which will be used in the following section.
Definition 1
(Liu 2010b) Let \(\xi\) be an uncertain variable with regular uncertainty distribution \(\Phi (x)\). Then the inverse function \(\Phi^{ - 1} (\alpha )\) is called the inverse uncertainty distribution of \(\xi\).
Theorem 1
(Liu 2010b) Let \(\xi_{1} ,\xi_{2} , \ldots ,\xi_{n}\) be independent uncertain variables with regular uncertainty distributions \(\Phi_{1} ,\Phi_{2} , \ldots ,\Phi_{n}\), respectively. If \(f(\xi_{1} ,\xi_{2} , \ldots ,\xi_{n} )\) is a strictly increasing with respect to \(\xi_{1} ,\xi_{2} , \ldots ,\xi_{m}\) and strictly decreasing with respect to \(\xi_{m + 1} ,\xi_{m + 2} , \ldots ,\xi_{n}\), then.
has an inverse uncertainty distribution
Definition 2
(Liu 2007) Let \(\xi\) be an uncertain variable, then the expected value of \(\xi\) is defined by.
provided that at least one of the integrals is finite.
Theorem 2
(Liu 2007) Let \(\xi\) be an uncertain variable with regular uncertainty distribution \(\Phi\). Then,
Theorem 3
(Liu and Ha 2010) Assume \(\xi_{1} ,\xi_{2} , \ldots ,\xi_{n}\) are independent uncertain variables with regular uncertainty distributions \(\Phi_{1} ,\Phi_{2} , \ldots ,\Phi_{n}\), respectively. If \(f(\xi_{1} ,\xi_{2} , \ldots ,\xi_{n} )\) is a strictly increasing with respect to \(\xi_{1} ,\xi_{2} , \ldots ,\xi_{m}\) and strictly decreasing with respect to \(\xi_{m + 1} ,\xi_{m + 2} , \ldots ,\xi_{n}\), then the uncertain variable.
has an expected value
Definition 4
(Liu et al. 2020) Let \(\xi\) be an uncertain variable with uncertainty distribution function \(\varphi (\lambda_{1} ,\lambda_{2} , \ldots ,\lambda_{n} ;x)\), whose parameters \(\lambda_{i} ,i = 1,2, \ldots ,n\) are independent uncertain variables with uncertainty distributions \(\Lambda_{i} ,i = 1,2, \ldots ,n\). Then, \(\xi\) is called a bi-uncertain variable.
Theorem 4
Let \(\xi\) be a nonnegative bi-uncertain variable defined on the uncertainty space \((\Gamma ,L,M)\), uncertainty distribution function of \(\xi\) is \(\varphi (\lambda_{1} ,\lambda_{2} , \ldots ,\lambda_{n} ;x)\), parameters \(\lambda_{i} ,i = 1, \ldots ,n\) are uncertain variables which have uncertainty distributions \(\Lambda_{i} (\theta_{i1} ,\theta_{i2} , \ldots ,\theta_{{im_{i} }} ;x),i = 1,2, \ldots ,n,\) and parameters \(\theta_{{{\text{ij}}}} ,i = 1,2, \ldots ,n,j = 1,2, \ldots ,n_{i}\) are constants. Assume \(\varphi (\lambda_{1} ,\lambda_{2} , \ldots ,\lambda_{n} ;x)\) is a strictly increasing with respect to \(\lambda_{1} , \ldots ,\lambda_{p} (p < n)\) and strictly decreasing with respect to \(\lambda_{p + 1} , \ldots ,\lambda_{n} .\) Then, we have.
Proof
Assume \(\xi\) is the lifetime of the component, according to Theorem 5 in literature Liu et al. 2020, we have
So
The proof is complete.
2.3 Uncertain shocks model
The system is suffered an external shock, the size of shock was described as a random variable in the traditional reliability model. In practical engineering application, some components in the system are newly developed products, with little data. In this situation, we use expert experience data to assess the size of external shocks. Expert experience data are often inaccurate, and sometimes the data given are in a wider range rather than specific values (Liu 2012). To describe the size of external shocks more accurately, expert data can be regarded as bi-uncertain variables. That is, the magnitude of the shock is regarded as an uncertain variable, and the parameters in the uncertainty distribution function are not constant but uncertain variables.
Assume the time interval of shock arrival is a nonnegative bi-uncertain variable \(\xi_{k}\), \(\xi_{k}\) is the uncertain time interval of the \(k - 1{\text{th}}\) uncertain shock and the \(k{\text{th}}\) uncertain shock, \(\xi_{1} ,\xi_{2} , \ldots\) are independent variables and nonidentical distributions with different uncertain parameters. Let uncertainty distributions of uncertain variables \(\xi_{1} ,\xi_{2} , \ldots\) are \(\varphi_{1} (\lambda_{11} ,\lambda_{12} , \ldots ,\lambda_{{1n_{1} }} ;x),\varphi_{2} (\lambda_{21} ,\lambda_{22} , \ldots ,\lambda_{{2n_{2} }} ;x), \ldots ,\) where parameters \(\lambda_{ij} ,i = 1,2, \ldots ,j = 1,2, \ldots\) are uncertain variables which have uncertainty distributions \(\Lambda_{ij} (\theta_{i1} ,\theta_{i2} , \ldots ,\theta_{{im_{i} }} ;x),i = 1,2, \ldots ,j = 1,2, \ldots\), and parameters \(\theta_{ij} ,i = 1,2, \ldots ,j = 1,2, \ldots\) are constants. Assume \(\varphi_{i} (\lambda_{i1} ,\lambda_{i2} , \ldots ,\lambda_{{in_{i} }} ;x)\) is a strictly increasing with respect to \(\lambda_{i1} , \ldots ,\lambda_{ip}\) and strictly decreasing with respect to \(\lambda_{i(p + 1)} , \ldots ,\lambda_{{in_{i} }} .\)
According to Theorem 4, we have
The damage size of shock is a nonnegative bi-uncertain variable \(\eta_{k}\), \(\eta_{k}\) is the size of \(k{\text{th}}\) uncertain shock, \(\eta_{1} ,\eta_{2} , \ldots\) are independent variables and nonidentical distributions with uncertain parameters. Let uncertainty distributions of uncertain variables \(\eta_{1} ,\eta_{2} , \ldots\) are \(\phi_{1} (\mu_{11} ,\mu_{12} , \ldots ,\mu_{{1n_{1} }} ;x),\phi_{2} (\mu_{21} ,\mu_{22} , \ldots ,\mu_{{2n_{2} }} ;x), \ldots ,\) where parameters \(\mu_{ij} ,i = 1,2, \ldots ,j = 1,2, \ldots\) are uncertain variables which have uncertainty distributions \(\Upsilon_{ij} (\omega_{i1} ,\omega_{i2} , \ldots ,\omega_{{im_{i} }} ;x),i = 1,2, \ldots ,j = 1,2, \ldots\), parameters \(\omega_{ij} ,i = 1,2, \ldots ,j = 1,2, \ldots\) are constants. Assume \(\phi_{i} (\mu_{i1} ,\mu_{i2} , \ldots ,\mu_{{in_{i} }} ;x)\) is a strictly increasing with respect to \(\mu_{i1} , \ldots ,\mu_{ip}\) and strictly decreasing with respect to \(\mu_{i(p + 1)} , \ldots ,\mu_{{in_{i} }} .\) According to Theorem 4, we have
2.4 Uncertain degradation model
In practical engineering applications, the damage size of the shock often affects degradation. External shock will accelerate the degradation of the system, and the shock causes a sudden increase in degradation. Software failure occurs when the total degradation exceeds the threshold level \(H\). The continuous uncertain degradation path is assumed
where \(X(t) = a + bt\) is the natural degradation, \(S(t) = \sum\nolimits_{i = 1}^{N(t)} {c\eta_{i} }\) is the sudden increase in the amount of degradation caused by the shock, called shock degradation. The magnitude of shock degradation and the damage size of shock are positively and linearly related, and \(c(0 < c < 1)\) is a constant.
The initial degradation \(a\) and the degradation rate \(b\) were described as two different constants in the traditional reliability model. In the absence of data or limited information, using the empirical data given by experts to replace the failure data, it is often estimated a wider range than the specific value (Liu 2012). Here, we assume that \(a\) and \(b\) are two different nonnegative bi-uncertain variables, let uncertainty distribution of uncertain variable \(a\) is \(\gamma_{a} (a_{1} ,a_{2} , \ldots ,a_{s} ;x)\), where parameters \(a_{i} ,i = 1,2, \ldots ,s\) are uncertain variables which have uncertainty distributions \(\gamma_{{a_{i} }} (a_{i1} ,a_{i2} , \ldots ,a_{{iq_{i} }} ;x),i = 1,2, \ldots ,s\), and parameters \(a_{ij} ,i = 1,2, \ldots ,s,j = 1,2, \ldots ,q_{s}\) are constants. Assume \(\gamma_{a} (a_{1} ,a_{2} , \ldots ,a_{s} ;x)\) is a strictly increasing with respect to \(a_{1} , \ldots ,a_{p}\) and strictly decreasing with respect to \(a_{(p + 1)} , \ldots ,a_{s} .\) Let uncertainty distribution of uncertain variable \(b\) is \(\gamma_{b} (b_{1} ,b_{2} , \ldots ,b_{l} ;x)\), where parameters \(b_{i} ,i = 1,2, \ldots ,l\) are uncertain variables which have uncertainty distributions \(\gamma_{{b_{i} }} (b_{i1} ,b_{i2} , \ldots ,b_{{iq_{i} }} ;x),i = 1,2, \ldots ,l\), and parameters \(b_{ij} ,i = 1,2, \ldots ,l,j = 1,2, \ldots ,q_{l}\) are constants. Assume \(\gamma_{b} (b_{1} ,b_{2} , \ldots ,b_{l} ;x)\) is a strictly increasing with respect to \(b_{1} , \ldots ,b_{p} {\kern 1pt} {\kern 1pt} (p < l)\) and strictly decreasing with respect to \(b_{(p + 1)} , \ldots ,b_{l} .\) According to Theorem 4, we have
3 Reliability analysis in extreme shock model
Because the system suffers continuous uncertain degradation and external uncertain shock, uncertain degradation and the external uncertain shock are dependent. External uncertain shock will cause a sudden increase in degradation. The magnitude of shock degradation and the damage size of uncertain shock are positively and linearly related. The system reliability is defined as the uncertain measure that the uncertain degradation does not exceed a threshold value \(H\), and the uncertain shocks do not cause the system fails by time \(t\),
In the extreme shock model, hardware failure occurs when the first shock damage size exceeds a hard failure threshold \(D\).
3.1 Hardware failure model duo to uncertain shock
Hardware fails if the damage size of the uncertain shock exceeds the threshold value \(D\) in the extreme shock model.
Theorem 5
The uncertain measure of hardware failure does not occur by time \(t\) is.
Proof
Since the uncertain events \(\left\{ {\bigcap\nolimits_{i = 1}^{N(t)} {(\eta_{i} } < D)} \right\}\) and the uncertain events \(\left\{ {\bigcup\nolimits_{k = 0}^{\infty } {(N(t) = k),\bigcap\nolimits_{i = 1}^{k} {(\eta_{i} } < D)} } \right\}\) are equivalent, then, we have
\(N(t)\) is the number of uncertain shock by time \(t\), which has an uncertainty distribution (Liu 2010b)
According to Theorem 1, \(\sum\nolimits_{i = 1}^{k + 1} {\xi_{i} }\) has inverse uncertainty distribution
According to Theorem 4, we have
So
The proof is complete.
3.2 Software failure model duo to uncertain degradation
Software failure occurs when the total degradation exceeds the threshold level \(H\).
Theorem 6
The uncertain measure of software does not failure by time \(t\) is.
Proof
Since the uncertain events \(\left\{ {\sum\nolimits_{i = 1}^{N(t)} {\eta_{i} } < \frac{{z_{3} }}{c},N(t) \ne 0} \right\}\) and the uncertain event \(\left\{ {\bigcup\nolimits_{k = 1}^{\infty } {N(t) = k,\sum\nolimits_{i = 1}^{k} {\eta_{i} } < \frac{{z_{3} }}{c}} } \right\}\) are equivalent, then, we have
Assume the time interval of uncertain shock arrival and the damage size of uncertain shock are independent, the shock model is an uncertain renewal reward process \(\sum\nolimits_{i = 1}^{N(t)} {\eta_{i} }\). According to Theorem 1, \(\sum\nolimits_{i = 1}^{k} {\eta_{i} }\) has inverse uncertainty distribution
According to Theorem 4, we have
Then
So
The proof is complete.
3.3 The reliability of the system in the extreme shock model
Theorem 7
If the continuous uncertain degradation process \(X_{s} (t)\) for the system follows \(X_{s} (t) = a + bt + \sum\nolimits_{i = 1}^{N(t)} {c\eta_{i} } ,\) for \(t \ge 0\). The external uncertain shock is an uncertain renewal reward process \(\sum\nolimits_{k = 1}^{N(t)} {\eta_{k} }\), and the shock pattern is an extreme shock model, then the system reliability is.
Proof
So
Let \(T\) be the lifetime of the system, according to Definition 2, the mean time to failure of the system is
4 Numerical examples and results
In this section, some numerical examples are given to explain the proposed model. Using MEMS as an example, assume the uncertain degradation process is \(X_{s} (t) = a + bt + \sum\nolimits_{i = 1}^{N(t)} {c\eta_{i} }\), where \(a,b(a > 0,b > 0)\) are bi-uncertain variables, \(c{\kern 1pt} {\kern 1pt} {\kern 1pt} {\kern 1pt} (0 < c < 1)\) is a constant. Assume
the time interval of shock arrival is a nonnegative bi-uncertain variable \(\xi_{i}\), the size of shock is a nonnegative bi-uncertain variable \(\eta_{i}\), assume
and the above distributions are independent, other parameters in the system are as follows in Table 1.
4.1 Reliability analysis for extreme shock model
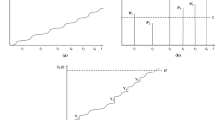
Firstly, we introduce the numerical function graphs of the gear under the extreme shock model as shown in Fig. 1. From Fig. 1, we can see the reliability function changes when the soft failure threshold increases from \(H = 90\) to \(H = 110\). In general, the reliability function increases with the increase of \(H\). The reason for this phenomenon is that the greater the soft failure threshold, the smaller the uncertain measure of software failure, so the reliability increases. The reliability function changes very little at first, and drops rapidly after the first change point until it reaches 0. This is because the gear is affected by both the uncertain gradual degradation and the uncertain shock. With the increase in time, the internal uncertain degradation also increases, the greater the uncertain measure of gradual degradation leading to gear failure, at the same time, the number of external shocks also increases with time, and the shock accelerates the degradation of the gear. In this way, the reliability of the gear decreases rapidly with time.

The sensitivity analysis of \(R(t)\) on \(H\) for extreme shock model
4.2 Comparison of the reliability between the bi-uncertain variable and uncertain variable
To compare the reliability of the bi-uncertain variable system (parameters with uncertain variables) with that of the uncertain variable system (parameters with constants), assume the uncertain degradation process in the uncertain variable system is
the time interval of shock arrival is a nonnegative uncertain variable \(\xi_{i}^{ * }\), the size of shock is a nonnegative uncertain variable \(\eta_{i}^{ * }\), assume
other parameters are the same as in Table 1.
In the extreme shock model, the reliability function graphs of the bi-uncertain variable system and uncertain variable system are shown in Fig. 2. From Fig. 2, it is easy to see that the reliability function of the system is different under the parameters with uncertain variables and constants. It's worth mentioning that the reliability of the system under the bi-uncertain variables are greater than that of the uncertain variables. This is because the parameters are uncertain variables, that is, the parameters are considered to have many values, and the parameters with constants is one of the parameter values, so the reliability of the parameters with uncertain variables are greater than that of constants. In the model with constant parameters, the system lifetime is shortened.

The belief reliability curves of the bi-uncertain variable and uncertain variable
4.3 Comparison the reliability between the dependent and independent competing failure model
It can be seen from Fig. 3 that the reliability function curves of gradual degradation and external shock under independent and dependent situations. In an independent situation, the gradual uncertain degradation process is

The reliability curves of the dependent and independent competing failure model
From the function graph, the reliability function under the dependent of gradual degradation and external shock is smaller than under the independent at some time. This is because of the gradual degradation and external shock depend on each other. Any external shock will accelerate the gradual degradation of the MEMS, which will reduce the reliability of the MEMS. This is because the failure of the MEMS is mainly caused by gradual degradation. The external shock has less effect on the MEMS than the gradual degradation. Therefore, shock degradation has less impact on the reliability of the system.
5 Conclusions and discussions
The causes of system failure can be divided into two parts, software failure caused by uncertain degradation, and hardware failure caused by external uncertain shock. Software failure is divided into gradual uncertain degradation caused by natural wear, weathering, corrosion and shock degradation caused by external shock. The magnitude of shock degradation and the damage size of shock are positively and linearly related. The extreme shock model has two remarkable features: (1) The amount of damage caused by external uncertain shock to the system exceeds the critical value \(D\), causing hardware failure. (2) If the amount of degradation exceeds the critical value \(H\), the software fails. Whether it is software failure or hardware failure, it will cause a system failure. The following conclusions can be drawn.
-
(1)
The reliability is sensitive to the threshold value of software failure \(H\). However, the threshold value of hardware failure \(D\) is not sensitive to reliability. Explain that the main reason for MEMS failure is uncertain natural degradation rather than external uncertain shock. Although external uncertain shock affects the reliability of MEMS, it has a small effect.
-
(2)
In the case expert empirical data are regarded as uncertain variables, and the parameters in the uncertainty distribution functions are uncertain variables and constants are comparable. With constant parameters will underestimate the reliability of the system and shorter system lifetime.
-
(3)
The magnitude of the shock degradation has impacts on reliability. A shock degradation results in a minor uncertain measure of system failure. Ignoring the shock degradation will overestimate the reliability of the system.
In the proposed model, we considered the impact of external shocks on degradation, and external shocks cause an instantaneous increase in the amount of degradation. In practical applications, external shocks may also change the degradation rate and failure threshold. The article assumes that the failure thresholds are constants values, and the failure thresholds will vary due to different users and environments, all of which can be considered in our future research.
References
Chien Y, Sheu S, Zhang Z, Love E (2006) An extended optimal replacement model of systems subject to shocks. Eur J Oper Res 175(1):399–412
Ding S, Zeng X (2018) Uncertain random assignment problem. Appl Math Model 56:96–104
Gao H, Cui L, Dong Q (2020) Reliability modeling for a two-phase degradation system with a change point based on a Wiener process. Reliab Eng Syst Saf. https://doi.org/10.1016/j.ress.2019.106601
Hao S, Yang J, Ma X, Zhao Y (2017) Reliability modeling for mutually dependent competing failure processes due to degradation and random shocks. Appl Math Model 51:232–249
Jiang L, Feng Q, Coit D (2012) Reliability and maintenance modeling for dependent competing failure processes with shifting failure thresholds. IEEE Trans Reliab 61(4):932–948
Li W, Pham H (2005) Reliability modeling of multi-state degraded systems with multi-competing failures and random shocks. IEEE Trans Reliab 54(2):297–303
Liu B (2007) Uncertainty Theory, 2nd edn. Springer-Verlag, Berlin
Liu B (2009) Theory and Practice of Uncertain Programming, 2nd edn. Springer-Verlag, Berlin
Liu B (2010a) Uncertain risk analysis and uncertain reliability analysis. J Uncertain Syst 4(3):163–170
Liu B (2010b) Uncertainty Theory: a branch of mathematics for modeling human uncertainty. Springer-Verlag, Berlin
Liu B (2012) Why is there a need for uncertainty theory. J Uncertain Syst 6(1):3–10
Liu S (2019) Leave-p-out cross validation test for uncertain Verhulst-Pearl model with imprecise observations. IEEE Access 7:131705–131709
Liu Y, Ha M (2010) Expected value of function of uncertain variables. J Uncertain Syst 4(3):181–186
Liu Z, Yang Y (2020) Least absolute deviations estimation for uncertain regression with imprecise observations. Fuzzy Optim Decis Making 19:33–52
Liu B, Zhang Z, Wen Y (2019) Reliability analysis for devices subject to competing failure processes based on chance theory. Appl Math Model 75:398–413
Liu Z, Hu L, Liu S, Wang Y (2020) Reliability analysis of general systems with bi-uncertain variables. Soft Comput 24:6975–6986
Rafiee K, Feng Q, Coit D (2014) Reliability modeling for dependent competing failure processes with changing degradation rate. IIE Trans 46(5):483–496
Rafiee K, Feng Q, Coit D (2017) Reliability assessment of competing risks with generalized mixed shock models. Reliab Eng Syst Saf 159:1–11
Sheng Y, Ke H (2020) Reliability evaluation of k-out-of-n systems with multiple states. Reliab Eng Syst Saf. https://doi.org/10.1016/j.ress.2019.106696
Tang H (2020) Uncertain vector autoregressive model with imprecise observations. Soft Comput. https://doi.org/10.1007/s00500-020-04991-9
Wang Y, Pham H (2012) Modeling the dependent competing risks with multiple degradation processes and random shock using time-varying copulas. IEEE Trans Reliab 6(1):13–22
Wang J, Bai G, Li Z, Zuo M (2020a) A general discrete degradation model with fatal shocks and age-and-state-dependent nonfatal shocks. Reliab Eng Syst Saf. https://doi.org/10.1016/j.ress.2019.106648
Wang J, Li Z, Bai G, Zuo M (2020b) An improved model for dependent competing risks considering continuous degradation and random shocks. Reliab Eng Syst Saf. https://doi.org/10.1016/j.ress.2019.106641
Weidea J, Pandeyb M, Noortwijk J (2010) Discounted cost model for condition-based maintenance optimization. Reliab Eng Syst Saf 95(3):236–246
Yang X, Liu B (2019) Uncertain time series analysis with imprecise observations. Fuzzy Optim Decis Making 18:263–278
Yang X, Ni Y, Zhang Y (2017) Stability in inverse distribution for uncertain differential equations. J Intell Fuzzy Syst 32(3):2051–2059
Yao K (2015) Uncertain differential equation with jumps. Soft Comput 19(7):2063–2069
Yao K, Liu B (2018) Uncertain regression analysis: An approach for imprecise observations. Soft Comput 22:5579–5582
Yao K, Zhou J (2016) Uncertain random renewal reward process with application to block replacement policy. IEEE Trans Fuzzy Syst 24(6):1637–1647
Zhang Q, Kang R, Wen M (2018) Belief reliability for uncertain random systems. IEEE Trans Fuzzy Syst 26(6):3605–3607
Acknowledgements
This research is supported by the National Natural Science of China under Grants No. 71601101, Scientific and Technological Innovation Programs of Higher Education Institutions in Shanxi (2020L0463, 2019L0738).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Shi, H., Wei, C., Zhang, Z. et al. Reliability analysis of dependent competitive failure model with uncertain parameters. Soft Comput 26, 33–43 (2022). https://doi.org/10.1007/s00500-021-06398-6
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-021-06398-6