
Abstract
In this paper, the lifetimes of system components are assumed to have independent and nonidentical uncertainty distributions with uncertain parameters. The reliability functions and mean time to failure of the general systems are investigated according to the uncertainty theory. Basic models of the general systems with bi-uncertain variables are established and analyzed, including series, parallel and series–parallel systems. The explicit expressions of reliability function and mean time to failure of each model are presented. Some numerical examples are given to illustrate the applications of the developed models and perform a comparison for the models with uncertain and bi-uncertain variables.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
System reliability analysis plays a critical role in engineering application because it is likely to lead serious consequences including postponed schedule, economic stagnation, credibility losses and so on. Reliability of a stochastic system originated in the late 1940s and early 1950s. After several decades of development, system reliability analysis based on probability theory has been widely studied and got many significant achievements (Rackwitz 2001; Faulin et al. 2010; Finkelstein and Cha 2013), and it has been applied in various fields such as communication systems, power systems, transportation systems and so on.
However, when probability theory is used to deal with reliability issues, we always use the long-run cumulative frequency to approximate the actual value in order to estimate the probability distributions of component lifetimes. This implies that we need large amounts of observation data by the statistics. In fact, it is hard for us to obtain observed data owing to technological, economical or some other reasons, and then, the domain expert’s subjective estimation needs to be adopted. Nevertheless, Liu (2015) showed that human beings usually estimate a much wider range of values than the object actually takes. If we still take human belief degrees as probability distribution, we maybe cause a counterintuitive result (Liu 2012). Hence, the reliability analysis based on probability theory is no longer applicable for modeling the belief degree.
In order to model the belief degree, an uncertainty theory was proposed in Liu (2007) and refined it in Liu (2010b), which was a branch of axiomatic mathematics founding on four axioms, the normality, duality, subadditivity and product axioms. In recent years, the uncertainty theory has been diffusely applied to address miscellaneous issues such as reliability analysis (Wang 2010; Hosseini and Wadbro 2016; Zeng et al. 2018; Liu et al. 2018; Zhang et al. 2019), option pricing problem (Peng and Yao 2011), portfolio selection problem (Zhang et al. 2015), solid transportation problem (Yang et al. 2015; Gao and Kar 2017), logistics routing problem (Huang et al. 2016), interest rate problem (Sun et al. 2018), risk assessment problem (Zhang et al. 2018; Yao and Zhou 2018) and so on.
Therefore, several researchers have poured attention into applying the uncertainty theory to reliability analysis. Liu (2007) put forward a concept of reliability index and gave some formulas to calculate the reliability index. Liu (2010a) presented the uncertain reliability analysis for the sake of handling system reliability. Liu et al. (2015) established some essential mathematical models of series, parallel, series–parallel and parallel–series systems under assumption that the lifetimes of these systems were considered as uncertain variables. Zeng et al. (2017) developed belief reliability to account for epistemic uncertainty in model-based reliability methods. Gao et al. (2018) introduced uncertain variable to weighted k-out-of-n system and presented some formulas to calculate the reliability index of the system. Additionally, Liu (2013a) employed the uncertainty theory to provide redundant standby method of improving the system reliability. Then, redundancy optimization of an uncertain parallel–series system was formulated by Hu et al. (2018), which developed three models through reliability maximization, lifetime maximization and cost minimization, respectively. Besides these, Zeng et al. (2013) showed an application of uncertainty theory in reliability evaluation of systems. Gao and Yao (2016) investigated new concepts of important indexes for an individual component and a group of components in an uncertain reliability system. Li et al. (2018) introduced the uncertainty theory to account for uncertainty due to small samples. Cao et al. (2019) proposed a discrete time series–parallel system with uncertain parameters, and some formulas were given to calculate the reliability of system.
System reliability analysis based on the uncertainty theory has been studied by many scholars under the assumption that the component lifetime is an uncertain variable. However, in practical engineering, most systems are composed of different components with different uncertainty distributions. On the other hand, the uncertainty distribution parameters of the component lifetimes are also uncertain owing to the uncertainty of working environment, so the bi-uncertain phenomena present in the real situations with no wonder. As a general mathematical description for this kind of uncertain phenomenon, bi-uncertain variable is defined as a mapping with some kind of measurability from an uncertainty space to a collection of uncertain variables. Naturally, bi-uncertain variable is a generalization of conventional uncertain variable, similar to the cases of bi-random variable (Peng and Liu 2007), fuzzy random variable (Liu and Liu 2003) or uncertain random variable (Liu 2013b). It is a challenging mission to formulate reliability and mean time to failure of the system with bi-uncertain variables.
This paper aims at employing uncertainty theory to investigate the reliability functions and mean time to failures of the general systems with bi-uncertain variables. This paper is organized as follows. In Sect. 2, some basic concepts and theorems of uncertainty theory are presented. In Sect. 3, the reliability function and mean time to failure of single component system are investigated according to the uncertainty theory. Section 4 is the main part of this paper, in which the basic models of developed systems with bi-uncertain variables are discussed, including series, parallel and series–parallel systems. In order to illustrate the applications of the developed system models, some numerical examples are given in Sect. 5. Finally, a brief conclusion is made in the last Section.
2 Preliminaries
In this section, we introduce some basic concepts and results in uncertainty theory, which are applied throughout the paper.
Definition 1
(Liu 2007) Let \(\Gamma \) be a nonempty set, and \(\text{ L }\) be a \(\sigma \)-algebra over \(\Gamma \). A set function \(\text{ M }\) is called an uncertain measure if it satisfies the following three axioms.
Axiom 1. (Normality Axiom) \(\text{ M }\left\{ \Gamma \right\} =1\) for the universal set \(\Gamma \).
Axiom 2. (Duality Axiom) \(\text{ M }\left\{ \varLambda \right\} +\text{ M }\left\{ {{\varLambda }^{c}} \right\} =1\) for any event \(\varLambda \).
Axiom 3. (Subadditivity Axiom) For every countable sequence of events \({{\varLambda }_{1}},\ {{\varLambda }_{2}},\ \ldots ,\) we have
Then, the triplet \(\left( {\Gamma ,\text{ L }, \text{ M }} \right) \) is called an uncertainty space. In addition, in order to provide the operational law, the uncertain measure on the product \(\sigma \)-algebra was proposed by Liu (2009) as follows.
Axiom 4. (Product Axiom) Let \(\left( {{\Gamma }_{k}},{{\text{ L }}_{k}},{{\text{ M }}_{k}} \right) \) be uncertainty space for \(k=1,2,\ldots \), the product uncertain measure \(\text{ M }\) is an uncertain measure satisfying
where \({{\varLambda }_{k}}\) are arbitrarily chosen events from \({{\text{ L }}_{k}}\) for \(k=1,2,\ldots \), respectively.
Definition 2
(Liu 2007) An uncertain variable is a function \(\xi \) from an uncertainty space \(\left( \Gamma ,\text{ L },\text{ M }\right) \) to the set of real numbers such that \(\left\{ \xi \in B \right\} \) is an event for any Borel set B of real numbers.
Definition 3
(Liu 2007) The uncertainty distribution \(\Phi \) of an uncertain variable \(\xi \) is defined by
for any real number x.
Definition 4
(Liu 2010b) Let \(\xi \) be an uncertain variable with regular uncertainty distribution \(\Phi \left( x \right) \), then the inverse function \({{\Phi }^{-1}}\left( \alpha \right) \) is called the inverse uncertainty distribution of \(\xi \).
Theorem 1
(Liu 2010b) Let \( {{\xi }_{1}},{{\xi }_{2}},\ldots ,{{\xi }_{n}} \) be independent uncertain variables with regular uncertainty distributions \( {{\Phi }_{1}},{{\Phi }_{2}}, \ldots ,{{\Phi }_{n}} \), respectively. Assume the function \( f\left( {{\xi }_{1}},{{\xi }_{2}},\right. \)\(\left. \cdots ,{{\xi }_{n}} \right) \) is strictly increasing with respect to \( {{\xi }_{1}},{{\xi }_{2}},\ldots ,{{\xi }_{m}} \) and strictly decreasing with respect to \({{\xi }_{m+1}},{{\xi }_{m+2}},\ldots ,{{\xi }_{n}}\), then the uncertain variable \( \xi =f\left( {{\xi }_{1}}, {{\xi }_{2}}, \ldots ,{{\xi }_{n}} \right) \) has an inverse uncertainty distribution
Theorem 2
(Liu 2010b) Assume \( {{\xi }_{1}},{{\xi }_{2}},\ldots ,{{\xi }_{n}} \) are independent uncertain variables with uncertainty distributions \( {{\Phi }_{1}},\)\({{\Phi }_{2}},\ldots ,{{\Phi }_{n}} \), respectively. Then \({{\xi }_{1}}\wedge {{\xi }_{2}}\wedge \cdots \wedge {{\xi }_{n}}\) and \({{\xi }_{1}}\vee {{\xi }_{2}}\vee \cdots \vee {{\xi }_{n}}\) have uncertainty distributions \(\Psi \left( x \right) ={{\Phi }_{1}}\left( x \right) \vee {{\Phi }_{2}}\left( x \right) \vee \cdots \vee {{\Phi }_{n}}\left( x \right) \) and \(\Psi \left( x \right) ={{\Phi }_{1}}\left( x \right) \wedge {{\Phi }_{2}}\left( x \right) \wedge \cdots \wedge {{\Phi }_{n}}\left( x \right) \), respectively.
In uncertainty theory, the expected value means the average value of uncertain variable, which plays an important role in the sense of uncertain measure, and indicates the size of uncertain variable.
Definition 5
(Liu 2007) Let \(\xi \) be an uncertain variable, then the expected value of \(\xi \) is defined by
provided that at least one of the two integrals is finite.
Theorem 3
(Liu 2007) Let \(\xi \) be an uncertain variable with regular uncertainty distribution \(\Phi \). Then,
Theorem 4
(Liu and Ha 2010) Assume \( {\xi _1},{\xi _2},\ldots ,{\xi _n} \) are independent uncertain variables with regular uncertainty distributions \( {{\Phi }_1},{{\Phi }_2},{\ldots } ,{{\Phi }_n} \), respectively. If \(f\left( {{\xi }_{1}},{{\xi }_{2}},{\ldots },{{\xi }_{n}} \right) \) is strictly increasing with respect to \({{\xi }_{1}},{{\xi }_{2}},\)\( \ldots ,{{\xi }_{m}}\) and strictly decreasing with respect to \({{\xi }_{m+1}},{{\xi }_{m+2}},\)\(\ldots ,{{\xi }_{n}}\), then the uncertain variable \(\xi = f\left( {{\xi }_{1}}, {{\xi }_{2}},\ldots ,{{\xi }_{n}} \right) \) has an expected value
3 Reliability of single component system with bi-uncertain variable
Definition 6
Let \(\zeta \) be an uncertain variable with uncertainty distribution \(\Phi \left( {{a}_{1}},{{a}_{2}},\ldots ,{{a}_{k}};t \right) \), whose parameters \( {{a}_{i}}, i = 1,\)\(2, \ldots ,k\) are independent uncertain variables with uncertainty distributions \({\Upsilon _i}, i = 1,2, \ldots ,k\). Then, \(\zeta \) is called a bi-uncertain variable.
For example, the uncertain variable \(\zeta \) is distributed with zigzag uncertainty distribution \(\text{ Z }\left( {{a},{b},{c} }\right) \), whose independent uncertain parameters a, b and c are denoted by \(a\sim \text{ L }\left( u,v \right) \), \({b}\sim \text{ L }\left( p,q \right) \) and \({c}\sim \text{ L }\left( m,n \right) \), respectively. In practical engineering, lifetimes of some components within a system could have different uncertainty distributions with uncertain parameters owing to the uncertainty of working environment. Consider a lifetime of the single component system as a bi-uncertain variable, and define the reliability function of the single component system as follows.
Definition 7
Let \(\xi \), a nonnegative bi-uncertain variable, be the lifetime of single component system defined on the uncertainty space \(\left( \Gamma ,\text{ L },\text{ M }\right) \). The reliability function of the single component system is defined by
Then, we denote \(\text{ M }\left\{ \gamma \left. \in \Gamma \right| \xi \left( \gamma \right) >t \right\} \) as \({{R}^{*}}\left( t \right) \), which is called uncertain reliability variable, that is
Here, the expected value of the measure is formulated as the reliability of completing the specified function at the time \(\left[ 0,t\right] \) and under certain conditions.
Definition 8
The mean time to failure (MTTF) of the single component system is defined by
Theorem 5
Let \({{a}_{1}},{{a}_{2}},\ldots ,{{a}_{k}}\) be independent uncertain parameters of the lifetime distribution of single component system with regular uncertainty distributions \({{\Upsilon }_{1}},{{\Upsilon }_{2}},\)\(\ldots ,{{\Upsilon }_{k}}\), respectively. If the uncertain reliability variable of single component system is strictly increasing with respect to \({{a}_{1}},{{a}_{2}},\ldots ,\)\({{a}_{g}}\) and strictly decreasing with respect to \({{a}_{g+1}},\)\({{a}_{g+2}},\ldots ,{{a}_{k}}\), then the reliability function and MTTF of the single component system are
and
where \(\Upsilon _{i}^{-1}\left( \alpha \right) \) is the inverse uncertainty distribution of uncertain variable \({{a}_{i}}\), \(i=1,2,\ldots ,k\).
Proof
Let \({{R}^{*}}\left( {{a}_{1}},{{a}_{2}},\ldots ,{{a}_{k}};t \right) \) denote the uncertain reliability variable of the component with uncertainty distribution \(\Psi \left( {{a}_{1}},{{a}_{2}},\ldots ,{{a}_{k}};t \right) \). According to Definition 4, \({{R}^{*}}\left( {{a}_{1}},{{a}_{2}},\ldots ,\right. \)\(\left. {{a}_{k}};t \right) \) has the inverse uncertainty distribution \({{\Psi }^{-1}}\left( \alpha \right) \), and by Definition 7 and Theorem 3, the reliability function of the single component system can be determined by
and the uncertain reliability variable \({{R}^{*}}\left( {{a}_{1}},{{a}_{2}},\ldots ,{{a}_{k}};t \right) \) is strictly increasing with respect to \({{a}_{1}},{{a}_{2}},\ldots ,{{a}_{g}}\) and strictly decreasing with respect to \({{a}_{g+1}},{{a}_{g+2}},\ldots ,\)\({{a}_{k}}\), \(1\le g\le k\). Following from Theorem 1, the inverse uncertainty distribution \({{\Psi }^{-1}}\left( \alpha \right) \) of the uncertain reliability variable \({{R}^{*}}\left( {{a}_{1}},{{a}_{2}},\ldots ,\right. \)\(\left. {{a}_{k}};t \right) \) is
where \(\Upsilon _{i}^{-1}\left( \alpha \right) \) is the inverse uncertainty distribution of uncertain variable \({{a}_{i}}\) with \(i=1,2,\ldots ,k\). Then, the reliability function of the single component system is
and the MTTF of the single component system is formulated owing to Definition 8 that is
\(\square \)
Example 1
The lifetime \(\xi \) of component is distributed with linear uncertainty distribution \(\text{ L }\left( {{e}_{1}},{{e}_{2}} \right) \), whose parameters \({{e}_{1}}\) and \({{e}_{2}}\) are independent uncertain variables, denoted by \({{e}_{1}}\sim \text{ L }\left( a,b \right) \) and \({{e}_{2}}\sim \text{ L }\left( c,d \right) \), respectively. According to Theorem 5, we have the reliability function:
and MTTF:
where a, b, c and d are real numbers with \(a<b<c<d\).
4 Reliability of general systems with bi-uncertain variables
In this section, we introduce basic models of the general systems with bi-uncertain variables, including series, parallel and series–parallel systems. The reliability functions and MTTFs of developed models are discussed, respectively.
4.1 Reliability of series system with bi-uncertain variables
Consider a series system consisting of n independent components connected in series, as shown in Fig. 1. Let \({{\xi }_{i}}\), a bi-uncertain variable, be the lifetime of component i in the series system defined on the uncertainty space \(\left( {{\Gamma }_{i}},{{\text{ L }}_{i}},{{\text{ M }}_{i}} \right) \), \(i=1,2,\ldots ,n.\) The component lifetimes \({{\xi }_{i}}, i=1,2,\ldots ,n\) are independently distributed with regular uncertainty distributions \({{\Phi }_{i}}\left( {{a}_{i1}},{{a}_{i2}},\ldots ,{{a}_{i{{k}_{i}}}};t \right) \), \(i=1,2,\ldots ,n\), where \({{a}_{i1}},{{a}_{i2}},\)\(\ldots ,{{a}_{i{{k}_{i}}}}\) are independent uncertain variables. It is clear that the lifetime of series system is \(\xi ={{\xi }_{1}}\wedge {{\xi }_{2}}\wedge \cdots \wedge {{\xi }_{n}}\), which is also a bi-uncertain variable. For the sake of simplicity, the model discussed on the product uncertainty space \(\left( \Gamma ,\text{ L },\text{ M }\right) \), where \(\Gamma ={{\Gamma }_{1}}\times {{\Gamma }_{2}}\times \cdots \times {{\Gamma }_{n}}\), \(\text{ L }={{\text{ L }}_{1}}\times {{\text{ L }}_{2}}\times \cdots \times {{\text{ L }}_{n}}\) and \(\text{ M }={{\text{ M }}_{1}}\wedge {{\text{ M }}_{2}}\wedge \cdots \wedge {{\text{ M }}_{n}}\).

A series system with bi-uncertain variables
Theorem 6
The reliability function of the series system with bi-uncertain variables is
where \({{k}_{i}} \) is the number of uncertain parameters contained in component i, \(i=1,2,\ldots ,n.\)
Proof
Let \({{R}_{i}}^{*}( {{a}_{i1}},{{a}_{i2}},\ldots ,{{a}_{i{{k}_{i}}}};t )\) denote the uncertain reliability variable of component i in the series system, that is
Furthermore, the uncertain reliability variable \({{R}^{*}}({\varvec{a}_{1}},{{\varvec{a}_{2}}},\ldots , {{\varvec{a}_{n}}};t)\) of the series system is
where \({{\varvec{a}_{i}}}=\left( {{a}_{i1}},{{a}_{i2}},\ldots ,{{a}_{i{{k}_{i}}}} \right) \), \(i=1,2,\ldots ,n\). According to Definition 7, the reliability function of the series system can be determined by
\(\square \)
Theorem 7
Let \({{a}_{i1}},{{a}_{i2}},\ldots ,{{a}_{i{{k}_{i}}}}\) be independent uncertain parameters of the lifetime distribution of component i in the series system with regular uncertainty distributions \({{\Upsilon }_{i1}},{{\Upsilon }_{i2}}, \ldots ,\)\({{\Upsilon }_{i{{k}_{i}}}}\), respectively. If the uncertain reliability variable of the series system is strictly increasing with respect to \({{a}_{i1}},{{a}_{i2}},\ldots ,\)\({{a}_{i{{g}_{i}}}}\) and strictly decreasing with respect to \({{a}_{i({{g}_{i}}+1)}},{{a}_{i({{g}_{i}}+2)}},\)\(\ldots ,{{a}_{i{{k}_{i}}}}\), then the reliability function and MTTF of the series system are
and
where \(\Upsilon _{i{{g}_{i}}}^{-1}\left( \alpha \right) \) is the inverse uncertainty distribution of uncertain parameter \({{a}_{i{{g}_{i}}}}\). \({{k}_{i}}\) is the number of uncertain parameters contained in component i with \(1\le {{g}_{i}}\le {{k}_{i}}\), \(i=1,2,\ldots ,n\).
Proof
Let \({{R}^{*}}({\varvec{a}_{1}},{{\varvec{a}_{2}}},\ldots ,{{\varvec{a}_{n}}};t)\) denote the uncertain reliability variable of the series system with uncertainty distribution \(\Psi ({\varvec{a}_{1}},{{\varvec{a}_{2}}},\ldots ,{{\varvec{a}_{n}}};t)\). It is known that the uncertain reliability variable \({{R}^{*}}({\varvec{a}_{1}},{{\varvec{a}_{2}}},\ldots ,{{\varvec{a}_{n}}};t)\) is strictly increasing with respect to \({{a}_{i1}},{{a}_{i2}},\ldots ,{{a}_{i{{g}_{i}}}}\) and strictly decreasing with respect to \({{a}_{i({{g}_{i}}+1)}}, {{a}_{i({{g}_{i}}+2)}},\ldots , a_{ik_{i}}\), \(1\le {{g}_{i}}\le {{k}_{i}}\), \(i=1,2,\ldots ,n.\) According to Theorem 1, the inverse uncertainty distribution \({{\Psi }^{-1}}\left( \alpha \right) \) of the uncertain reliability variable \({{R}^{*}}({\varvec{a}_{1}},{{\varvec{a}_{2}}},\ldots ,\)\({{\varvec{a}_{n}}};t)\) is
where \({{\varvec{a}_{i}}}=( {{a}_{i1}},{{a}_{i2}},\ldots ,{{a}_{i{{k}_{i}}}})\), \(i=1,2,\ldots ,n.\) Then by Theorem 4, we obtain the reliability function of the series system with bi-uncertain variables which is
The MTTF of the series system is formulated owing to Definition 8 and Theorem 6. That is
\(\square \)
4.2 Reliability of parallel system with bi-uncertain variables
Consider a parallel system consisting of m independent components proceed simultaneously, see Fig. 2. Let \({{\xi }_{j}} \), a bi-uncertain variable, be the lifetime of component j in the parallel system defined on the uncertainty space \(\left( {{\Gamma }_{j}},{{\text{ L }}_{j}},{{\text{ M }}_{j}} \right) \), \(j=1,2,\ldots ,m.\) The component lifetimes \({{\xi }_{j}}\), \(j=1,2,\ldots ,m\) are independently distributed with regular uncertainty distributions \({{\Phi }_{j}}( {{a}_{j1}},{{a}_{j2}},\ldots ,{{a}_{j{{k}_{j}}}};t )\), \(j=1,2, \dots ,m,\) where \({{a}_{j1}},\)\({{a}_{j2}},\ldots ,{{a}_{j{{k}_{j}}}}\) are independent uncertain variables. It is clear that the lifetime of parallel system is \(\xi ={{\xi }_{1}}\vee {{\xi }_{2}}\vee \cdots \vee {{\xi }_{m}}\), which is also a bi-uncertain variable. For the sake of simplicity, the model discussed on the product uncertainty space \(\left( \Gamma ,\text{ L },\text{ M }\right) \), where \(\Gamma \text {=}{{\Gamma }_{1}}\times {{\Gamma }_{2}}\times \cdots \times {{\Gamma }_{m}}\), \(\text{ L }={{\text{ L }}_{1}}\times {{\text{ L }}_{2}}\times \cdots \times {{\text{ L }}_{m}}\) and \(\text{ M }={{\text{ M }}_{1}}\wedge {{\text{ M }}_{2}}\wedge \cdots \wedge {{\text{ M }}_{m}}\).

A parallel system with bi-uncertain variables
Theorem 8
The reliability function of the parallel system with bi-uncertain variables is
where \({{k}_{j}}\) is the number of uncertain parameters contained in component j, \(j=1,2,\ldots ,m.\)
Proof
Let \({{R}_{j}}^{*}({{a}_{j1}},{{a}_{j2}},\ldots ,{{a}_{j{{k}_{j}}}};t )\) denote the uncertain reliability variable of component j in the parallel system, that is
Further, the uncertain reliability variable \({{R}^{*}}({\varvec{a}_{1}},{{\varvec{a}_{2}}},{\ldots },{{\varvec{a}_{m}}};t)\) of the parallel system is
where \({{\varvec{a}_{j}}}=\big ({{a}_{j1}},{{a}_{j2}},\ldots ,{{a}_{j{{k}_{j}}}}\big )\), \(j=1,2,\ldots ,m\). According to Definition 7, the reliability function of the parallel system can be determined by
\(\square \)
Theorem 9
Let \({{a}_{j1}},{{a}_{j2}},\ldots ,{{a}_{j{{k}_{j}}}}\) be independent uncertain parameters of the lifetime distribution of component j in the parallel system with regular uncertainty distributions \({{\Upsilon }_{j1}},{{\Upsilon }_{j2}},\ldots ,{{\Upsilon }_{j{{k}_{j}}}}\), respectively. If the uncertain reliability variable of the parallel system is strictly increasing with respect to \({{a}_{j1}},{{a}_{j2}},\ldots ,{{a}_{j{{g}_{j}}}}\) and strictly decreasing with respect to \({{a}_{j({{g}_{j}}+1)}},{{a}_{j({{g}_{j}}+2)}},\ldots ,\)\({{a}_{j{{k}_{j}}}}\), then the reliability function and MTTF of the parallel system are
and
where \(\Upsilon _{j{{g}_{j}}}^{-1}\left( \alpha \right) \) is the inverse uncertainty distribution of uncertain variable \({{a}_{j{{g}_{j}}}}\). \({{k}_{j}}\) is the number of uncertain parameters contained in component j with \(1\le {{g}_{j}}\le {{k}_{j}}\), \(j=1,2,\ldots ,m.\)
Proof
Let \({{R}^{*}}({\varvec{a}_{1}},{{\varvec{a}_{2}}},\ldots ,{{\varvec{a}_{m}}};t)\) denote the uncertain reliability variable of the parallel system with uncertainty distribution \(\Psi ({\varvec{a}_{1}},{{\varvec{a}_{2}}},\ldots ,{{\varvec{a}_{m}}};t)\). It is known that \({{R}^{*}}({\varvec{a}_{1}},{{\varvec{a}_{2}}},\ldots ,{{\varvec{a}_{m}}};t)\) is strictly increasing with respect to \({{a}_{j1}},{{a}_{j2}},\ldots ,{{a}_{j{{g}_{j}}}}\) and strictly decreasing with respect to \({{a}_{j({{g}_{j}}+1)}},{{a}_{j({{g}_{j}}+2)}},\ldots ,{{a}_{j{{k}_{j}}}}\) for \(1\le {{g}_{j}}\le {{k}_{j}}\), \(j=1,2,\ldots ,m.\) According to Theorem 1, the inverse uncertainty distribution \({{\Psi }^{-1}}\left( \alpha \right) \) of the uncertain reliability variable \({{R}^{*}}({\varvec{a}_{1}},{{\varvec{a}_{2}}},\ldots ,{{\varvec{a}_{m}}};t)\) is
where \({{\varvec{a}_{j}}}=( {{a}_{j1}},{{a}_{j2}},\ldots ,{{a}_{j{{k}_{j}}}})\), \(j=1,2,\ldots ,m.\) Then by Theorem 4, we obtain the reliability function of the parallel system with bi-uncertain variables which is
The MTTF is formulated by Definition 8 and Theorem 8. That is
\(\square \)
4.3 Reliability of series–parallel system with bi-uncertain variables
Consider a series–parallel system consisting of n subsystems \({{A}_{1}},{{A}_{2}},\ldots ,{{A}_{n}}\) in series, each subsystem \({{A}_{i}}\left( i=1,2,\ldots ,n \right) \) consists of \({{m}_{i}}\) independent components connected in parallel, as shown in Fig. 3. Let \({{\xi }_{ij}}\), a bi-uncertain variable, be the lifetime of component j of subsystem \({{A}_{i}}\) defined on the uncertainty space \(\left( {{\Gamma }_{ij}},{{\text{ L }}_{ij}},{{\text{ M }}_{ij}}\right) \), \(i=1,2,\ldots ,n\), \(j=1,2,\ldots ,{{m}_{i}}.\) The lifetimes \({{\xi }_{ij}}\), \(i=1,2,\ldots ,n\), \(j=1,2,\ldots ,{{m}_{i}}\) are independently distributed with regular uncertainty distributions \({{\Phi }_{ij}}\)\(( {{a}_{ij1}},{{a}_{ij2}},\ldots ,{{a}_{ij{{k}_{ij}}}};t)\), \(i=1,2,\ldots ,n\), \(j=1,2,\ldots ,{{m}_{i}}\), where \({{a}_{ij1}},{{a}_{ij2}},\ldots ,{{a}_{ij{{k}_{ij}}}}\) are independent uncertain variables. Obviously, the lifetime of series–parallel system is \(\xi =\bigwedge _{i=1}^{n}\)\(\bigvee _{j=1}^{{{m}_{i}}}{{\xi }_{ij}}\), which is also a bi-uncertain variable. For the sake of simplicity, the model is discussed on the product uncertainty space \(\left( \Gamma ,\text{ L },\text{ M }\right) \), where \(\Gamma ={{\Gamma }_{11}}\times {{\Gamma }_{12}}\times \cdots \times {{\Gamma }_{n{{m}_{n}}}}\), \(\text{ L }\text {=}{{\text{ L }}_{11}}\times {{\text{ L }}_{12}}\times \cdots \times {{\text{ L }}_{n{{m}_{n}}}}\) and \(\text{ M }={{\text{ M }}_{11}}\wedge {{\text{ M }}_{12}}\wedge \cdots \wedge {{\text{ M }}_{n{{m}_{n}}}}.\)

A series–parallel system with bi-uncertain variables
Theorem 10
The reliability function of the series–parallel system with bi-uncertain variables is
where \({{k}_{ij}}\) is the number of uncertain parameters contained of component j of subsystem \({{A}_{i}}\), subjected to \(i=1,2,\ldots ,n\), \(j=1,2,\ldots ,{{m}_{i}}\).
Proof
Let \({{R}_{ij}}^{*}( {{a}_{ij1}},{{a}_{ij2}},\ldots ,{{a}_{ij{{k}_{ij}}}};t )\) denote the uncertain reliability variable of component j of subsystem \({{A}_{i}}\), that is
Further, the uncertain reliability variable \({{R}_{{A}_{i}}}^{*}( {\varvec{a}_{i1}},{\varvec{a}_{i2}},\ldots ,\)\({\varvec{a}_{i{{m}_{i}}}};t )\) of subsystem \({{A}_{i}}\) is
Furthermore, since the series–parallel system composed of n subsystems connected in series, the uncertain reliability variable \({{R}^{*}}( { {\varvec{a}_{1}}},{{\varvec{a}_{2}}},\ldots ,{{\varvec{a}_{n}}};t)\) of this system is
where \({{\varvec{a}_{i}}}=( {\varvec{a}_{i1}},{\varvec{a}_{i2}},\ldots ,{\varvec{a}_{i{{m}_{i}}}};t )\), \({\varvec{a}_{ij}}=({{a}_{ij1}},{{a}_{ij2}},\ldots ,{{a}_{ij{{k}_{ij}}}})\), \(i=1,2,\ldots ,n\), \(j=1,2,\ldots ,{{m}_{i}}\). According to Definition 7, the reliability function of the series–parallel system can be formulated by
\(\square \)

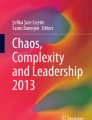
a Reliability function of the single component system, b reliability function of the series system, c reliability function of the parallel system, d reliability function of the series–parallel system
Theorem 11
Let \({{a}_{ij1}},{{a}_{ij2}},\ldots ,{{a}_{ij{{k}_{ij}}}}\) be independent uncertain parameters of the lifetime distribution of component j of subsystem \({{A}_{i}}\) with regular uncertainty distributions \({{\Upsilon }_{ij1}},{{\Upsilon }_{ij2}},\)\(\ldots ,{{\Upsilon }_{ij{{k}_{ij}}}}\), respectively. If the uncertain reliability variable of the series–parallel system is strictly increasing with respect to \({{a}_{ij1}},{{a}_{ij2}},\ldots ,\)\({{a}_{ij{{g}_{ij}}}}\) and strictly decreasing with respect to \({{a}_{ij\left( {{g}_{ij}}+1 \right) }},\)\({{a}_{ij\left( {{g}_{ij}}+2 \right) }},\ldots ,{{a}_{ij{{k}_{ij}}}}\), then the reliability function and MTTF of the series–parallel system are
and
where \(\Upsilon _{ij{{g}_{ij}}}^{-1}\left( \alpha \right) \) is the inverse uncertainty distribution of uncertain variable \({{a}_{ij{{g}_{ij}}}}\). \({{k}_{ij}}\) is the number of uncertain parameters contained in component j of subsystem \({{A}_{i}}\) with \(1\le {{g}_{ij}}\le {{k}_{ij}}\), \(i=1,2,\ldots ,n\), \(j=1,2,\ldots ,{{m}_{i}}.\)
Proof
Let \({{\Phi }_{ij}}({{a}_{ij1}},{{a}_{ij2}},\ldots ,{{a}_{ij{{k}_{ij}}}};t)\) denote the regular uncertainty distribution of the lifetime \({{\xi }_{ij}}\) of component j of subsystem \({{A}_{i}}\), where \({{a}_{ij1}},{{a}_{ij2}},\ldots ,\)\({{a}_{ij{{k}_{ij}}}}\) are uncertain variables with inverse uncertainty distributions \(\Upsilon _{ij1}^{-1}\left( \alpha \right) ,\Upsilon _{ij2}^{-1}\left( \alpha \right) , \ldots ,\Upsilon _{ij{{k}_{ij}}}^{-1}\left( \alpha \right) \), respectively. According to Theorem 1, the inverse uncertainty distribution \({{\Psi }^{-1}}\left( \alpha \right) \) of the uncertain reliability variable \({{R}^{*}}\left( {\varvec{{a}_{1}}},{\varvec{{a}_{2}}},\ldots ,{\varvec{{a}_{n}}};t \right) \) is
where \({{\varvec{a}_{i}}}{=}({{a}_{i11}},{{a}_{i12}},{\ldots } ,{{a}_{i1{{k}_{i1}}}},{\dots } ,{{a}_{ij1}},{{a}_{ij2}},{\ldots } ,{{a}_{ij{{k}_{ij}}}},{\ldots } ,\)\({{a}_{i{{m}_{i}}1}},{{a}_{i{{m}_{i}}2}},\ldots ,{{a}_{i{{m}_{i}}{{k}_{i{{m}_{i}}}}}} )\), \(i=1,2,\ldots ,n\). Then by Theorem 4, we obtain the reliability function of the series–parallel system with bi-uncertain variables which is
and the MTTF of the series–parallel system is formulated by Definition 8 and Theorem 10. That is
\(\square \)
5 Numerical example
In this section, some numerical examples are given to illustrate the applications of the developed models, including series, parallel and series–parallel systems. The reliability functions and MTTFs of the general systems are compared and analyzed when the lifetimes are considered as uncertain and bi-uncertain variables, respectively.
Example 2
Consider a single component system, and assume that the lifetime of component is uncertain variable \(\xi \) with regular normal uncertainty distribution \(\xi \sim \text{ N }\left( {{\xi }_{1}},0.5 \right) \), where \({{\xi }_{1}}\) is an uncertain variable with regular normal uncertainty distributions \({{\xi }_{1}}\sim \text{ N }\left( 3,0.5 \right) \). According to Theorem 5, the numerical values of the reliability functions in the single component system are illustrated in Table 1.
Example 3
Consider a series system consisting of three independent components, and assume \({{\xi }_{1}}\), \({{\xi }_{2}}\), \({{\xi }_{3}}\), bi-uncertain variables, be the lifetimes of components in the series system and lifetime distributions of components are given in Table 2. According to Theorem 7, the numerical values of the reliability functions in the series system are illustrated in Table 3.
Example 4
Consider a parallel system consisting of three independent components. The lifetimes of components are bi-uncertain variables \({{\xi }_{1}}\), \({{\xi }_{2}}\), \({{\xi }_{3}}\), and lifetime distributions of components are given in Table 4. According to Theorem 9, the numerical values of the reliability functions in the parallel system are illustrated in Table 5.
Example 5
Consider a series–parallel system consisting of three subsystems in series, and each subsystem consists of three components connected in parallel. The lifetime of component j of subsystem \({{A}_{i}}\) is assumed to be a bi-uncertain variable \({{\xi }_{ij}}\), where \(i=1,2,3\), \(j=1,2,3\). Lifetime distributions of components of the subsystems are given in Table 6. According to Theorem 11, the numerical values of the reliability functions in the series–parallel system are illustrated in Table 7.
In order to illustrate the relationship between the different parameters and the corresponding reliability functions of systems, we initially make the necessary instructions: A system with bi-uncertain variables means that whose lifetime distribution with uncertain parameters, while a system with uncertain variables means that lifetime distribution with constant parameters. Based on these, we select the expected value of \(\text{ Z }\left( a, b,c \right) \) as the constant parameter of the component lifetime distribution. That means general systems with bi-uncertain variables degenerate to general systems with uncertain variables. The lifetime distributions of these components in each degenerated system are listed in Table 8.
The graphs for comparing the reliability functions of the single component, series, parallel and series–parallel systems under different parameters are shown in Fig. 4a–d, respectively. The reliability function of each system with constant parameters (uncertain variables) is obtained by traditional uncertain reliability analysis in green dotted line, while the reliability function with uncertain parameters (bi-uncertain variables) is obtained in red solid line. From Fig. 4a–d, we can easily observed that the systems’ reliability functions are indeed affected by the assumption that the parameters are uncertain variables. It is particularly noteworthy that the general shapes of the plots under constant and uncertain parameters are similar. However, Fig. 4a displays the reliability function of single component system with constant parameters is larger up to a specific time point, and it becomes lower than the case with uncertain parameters beyond this specific time point. Figure 4b and d shows that the reliability functions of series system and series–parallel system have weak sensitivity to the assumption under uncertain parameters. Figure 4c shows that the reliability function of parallel system with uncertain parameters has a larger reliability than the one with constant parameters.
Additionally, in order to illustrate the relationship between the different parameters and the corresponding MTTFs of systems, we make a comparison between the common systems referred in Examples 2–5 and degenerated general systems presented in Table 8. According to Eqs. (5, 8, 11, 14) and Theorems proved by Liu et al. (2015), the MTTFs of systems are illustrated when the lifetimes considered as bi-uncertain and uncertain variables, respectively, as shown in Table 9. The results show that the obtained MTTFs with bi-uncertain variables are larger than the ones with uncertain variables.
6 Conclusions
This paper developed a generalization for system reliability analysis based on the assumption that the lifetime of system component is bi-uncertain variable. Some theorems for reliability functions and MTTFs of general single component, series, parallel and series–parallel systems were derived. In addition, some numerical examples were presented to illustrate the applications of the developed models, including series, parallel and series–parallel systems. Finally, we compared and analyzed the reliability functions and MTTFs of these systems when the component lifetimes were considered as bi-uncertain variables and uncertain variables, respectively.
Abbreviations
- \({\text{ M }}\) :
-
Uncertain measure
- \({\vee }\) :
-
Maximum operator
- \({\wedge }\) :
-
Minimum operator
- \({{\xi }_{i}}\) :
-
Lifetime of component i in series system, \(i = 1,2, \ldots ,n\)
- \({{\xi }_{j}}\) :
-
Lifetime of component j in parallel system, \(j = 1, 2, \ldots , m\)
- \({{\xi }_{ij}}\) :
-
Lifetime of component j for subsystem \({{A}_{i}}\), \(i = 1,2, \ldots , n, j = 1, 2, \ldots ,{m_i}\)
- \({k_i}\) :
-
Number of uncertain parameters contained in component i
- \({k_j}\) :
-
Number of uncertain parameters contained in component j
- \({k_{ij}}\) :
-
Number of uncertain parameters contained in component j for subsystem \({A_i}\)
- \({R_i}^*(\; \cdot \; ;t)\) :
-
Uncertain reliability variable of component i in series system
- \({R_j}^*(\; \cdot \; ;t)\) :
-
Uncertain reliability variable of component j in parallel system
- \({{R_{ij}}^*(\; \cdot \; ;t)}\) :
-
Uncertain reliability variable of component j of subsystem \({A_i}\)
- \({R_{{A}_{i}}}^*(\; \cdot \; ;t)\) :
-
Uncertain reliability variable of subsystem \({A_i}\)
- \({\Phi }_{i}(\; \cdot \; ;t)\) :
-
Uncertainty distribution of component lifetime \({{\xi }_{i}}\) in series system
- \({\Phi }_{j}(\; \cdot \; ;t)\) :
-
Uncertainty distribution of component lifetime \({{\xi }_{j}}\) in parallel system
- \({\Phi }_{ij}(\; \cdot \; ;t)\) :
-
Uncertainty distribution of component lifetime \({{\xi }_{ij}}\) in series–parallel system
- \(\Upsilon _{i{{g}_{i}}}^{-1}(\alpha )\) :
-
Inverse uncertainty distribution of uncertain variable \({{a}_{i{{g}_{i}}}}\)
- \(\Upsilon _{j{{g}_{j}}}^{-1}(\alpha )\) :
-
Inverse uncertainty distribution of uncertain variable \({{a}_{j{{g}_{j}}}}\)
- \(\Upsilon _{ij{{g}_{ij}}}^{-1}(\alpha )\) :
-
Inverse uncertainty distribution of uncertain variable \({{a}_{ij{{g}_{ij}}}}\)
- \({{\Psi }^{ - 1}(\alpha )}\) :
-
Inverse uncertainty distribution of uncertain reliability variable
- \({\text{ Z }}\left( {a,b,c} \right) \) :
-
Zigzag uncertain variable
- \({\text{ N }}\left( {e,\sigma } \right) \) :
-
Normal uncertain variable
- \(\text{ LOGN }(e,\sigma )\) :
-
Lognormal uncertain variable
- \({R^*(\; \cdot \; ;t)}\) :
-
Uncertain reliability variables of system
- \(R\left( t \right) \) :
-
Reliability function of system at time t
- \(\mathrm{MTTF }\) :
-
Mean time to failure
References
Cao X, Hu L, Li Z (2019) Reliability analysis of discrete time series–parallel systems with uncertain parameters. J Ambient Intell Humaniz Comput 10(9):2657–2668
Faulin J, Juan AA, Alsina SSM, Ramirez–Marquez JE (2010) Simulation methods for reliability and availability of complex systems. Springer, Berlin
Finkelstein M, Cha JH (2013) Stochastic modeling for reliability. Springer, London
Gao J, Yao K, Zhou J, Ke H (2018) Reliability analysis of uncertain weighted k-out-of-n systems. IEEE Trans Fuzzy Syst 26(5):2663–2671
Gao R, Yao K (2016) Importance index of components in uncertain reliability systems. J Uncertainty Anal Appl 4:7
Gao Y, Kar S (2017) Uncertain solid transportation problem with product blending. Int J Fuzzy Syst 19(6):1916–1926
Hosseini SA, Wadbro E (2016) Connectivity reliability in uncertain networks with stability analysis. Expert Syst Appl 57:337–344
Hu L, Huang W, Wang G, Tian R (2018) Redundancy optimization of an uncertain parallel–series system with warm standby elements. Complexity. https://doi.org/10.1155/2018/3154360
Huang M, Ren L, Lee LH, Wang X, Kuang H, Shi H (2016) Model and algorithm for 4PLRP with uncertain delivery time. Inf Sci 330(10):211–225
Li X, Wu J, Liu L, Wen M, Kang R (2018) Modeling accelerated degradation data based on the uncertain process. IEEE Trans Fuzzy Syst 27(8):1532–1542
Liu B (2007) Uncertainty Theory, 2nd edn. Springer, Berlin
Liu B (2009) Some research problems in uncertainty theory. J Uncertain Syst 3(1):3–10
Liu B (2010a) Uncertain risk analysis and uncertain reliability analysis. J Uncertain Syst 4(4):163–170
Liu B (2010b) Uncertainty theory: a branch of mathematics for modeling human uncertainty. Springer, Berlin
Liu B (2012) Why is there a need for uncertainty theory? J uncertain syst 6(1):3–10
Liu B (2015) Uncertainty Theory, 4th edn. Springer, Berlin
Liu W (2013a) Reliability analysis of redundant system with uncertain lifetimes. Int Jpn 16(2):881–887
Liu Y (2013b) Uncertain random variables: a mixture of uncertainty and randomness. Soft Comput 17(4):625–634
Liu Y, Ha M (2010) Expected value of function of uncertain variables. J Uncertain Syst 4(4):181–186
Liu Y, Li X, Xiong C (2015) Reliability analysis of unrepairable systems with uncertain lifetimes. Int J Secur Appl 9(12):289–298
Liu Y, Liu B (2003) Fuzzy random variable: a scalar expected value operator. Fuzzy Optim Decis Mak 2(2):143–160
Liu Y, Ma Y, Qu Z, Li X (2018) Reliability mathematical models of repairable systems with uncertain lifetimes and repair times. IEEE Access 6:71285–71295
Peng J, Liu B (2007) Birandom variables and birandom programming. Comput Ind Eng 53(3):433–453
Peng J, Yao K (2011) A new option pricing model for stocks in uncertainty markets. Int J Oper Res 8(2):18–26
Rackwitz R (2001) Reliability analysis—a review and some perspectives. Struct Saf 23(4):365–395
Sun Y, Yao K, Fu Z (2018) Interest rate model in uncertain environment based on exponential Ornstein–Uhlenbeck equation. Soft Comput 22(2):465–475
Wang Z (2010) Structural reliability analysis using uncertainty theory. In: Proceedings of the first international conference on uncertainty theory, Urumchi, pp166–170
Yang L, Liu P, Li S, Gao Y, Ralescu DA (2015) Reduction methods of type-2 uncertain variables and their applications to solid transportation problem. Inf Sci 291:204–237
Yao K, Zhou J (2018) Ruin time of uncertain insurance risk process. IEEE Trans Fuzzy Syst 26(1):19–28
Zeng Z, Kang R, Wen M, Zio E (2017) A model–based reliability metric considering aleatory and epistemic uncertainty. IEEE Access 5:15505–15515
Zeng Z, Kang R, Wen M, Zio E (2018) Uncertainty theory as a basis for belief reliability. Inf Sci 429:26–36
Zeng Z, Wen M, Kang R (2013) Belief reliability: a new metrics for products’ reliability. Fuzzy Optim Decis Mak 12(1):15–27
Zhang B, Peng J, Li S (2015) Uncertain programming models for portfolio selection with uncertain returns. Int J Syst Sci 46(14):2510–2519
Zhang Q, Kang R, Wen M (2018) A new method of level–2 uncertainty analysis in risk assessment based on uncertainty theory. Soft Comput 22(17):5867–5877
Zhang Q, Kang R, Wen M, Yang Y (2019) Decomposition method for belief reliability analysis of complex uncertain random systems. IEEE Access. https://doi.org/10.1109/ACCESS.2019.2929199
Acknowledgements
This work is supported in part by the National Natural Science Foundation of China (No. 11601469), the Natural Science Foundation of Hebei Province (No. A2018 203088) and the Science Research Project of Education Department of Hebei Province (No. ZD2017079), People’s Republic of China.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare that there are no conflicts of interest regarding the publication of this paper.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Additional information
Communicated by V. Loia.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Liu, Z., Hu, L., Liu, S. et al. Reliability analysis of general systems with bi-uncertain variables. Soft Comput 24, 6975–6986 (2020). https://doi.org/10.1007/s00500-019-04331-6
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-019-04331-6