
Abstract
Neural circuits responsible for stance control serve other motor tasks as well. We investigated the effect of prior locomotor tasks on stance, hypothesizing that postural post-effects of walking are dependent on walking direction. Subjects walked forward (WF) and backward (WB) on a treadmill. Prior to and after walking they maintained quiet stance. Ground reaction forces and centre of foot pressure (CoP), ankle and hip angles, and trunk inclination were measured during locomotion and stance. In WF compared to WB, joint angle changes were reversed, trunk was more flexed, and movement of CoP along the foot sole during the support phase of walking was opposite. During subsequent standing tasks, WB induced ankle extension, hip flexion, trunk backward leaning; WF induced ankle flexion and hip extension. The body CoP was displaced backward post-WB and forward post-WF. The post-effects are walking-direction dependent, and possibly related to foot-sole stimulation pattern and trunk inclination during walking.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The human locomotor system can react quickly to unpredictable conditions, but it can also produce predictive adjustments in response to persistent perturbations (Marigold and Patla 2005; Nieuwenhuijzen and Duysens 2007; Sorensen et al. 2002). Adaptive mechanisms are therefore critical for optimising coordination patterns and allow individuals to maintain stability and efficiency of walking and balancing behaviours (De Nunzio and Schieppati 2007; De Nunzio et al. 2005; Diekmann et al. 2004; Richards et al. 2007). Previous studies of balance control after performance of specific motor tasks have shed light on how the central nervous system is able to integrate different sensory inputs taking into account both the external stimuli and environmental constraints of where the task is performed (Derave et al. 2002; Duclos et al. 2004; Kluzik et al. 2007a, b; Zanetti and Schieppati 2007). The phenomenon of transfer of a motor trace built up during a locomotor task to a subsequent standing task is consistent with a central adaptive mechanism that adjusts the surface-referenced set point for whole body orientation in space (Kluzik et al. 2007a, b; Zanetti and Schieppati 2007).
There are several unrelated reports on postural post-effects. For instance, muscle-tendon vibration, which mimics a tonic afferent volley from the muscle spindles, has lasting effects on body orientation in space, both during stance (Capicíková et al. 2006; Courtine et al. 2007; Ivanenko et al. 2000) and locomotion (Bove et al. 2001; Courtine et al. 2001, 2007; Schmid and Schieppati 2005). Blurring of proprioceptive input from leg muscles, as produced by vibration during stance, leads to post-vibration instability (Duclos et al. 2007; Wierzbicka et al. 1998). Long-lasting body leaning, associated to a change in postural reference resulting from increased proprioceptive inflow, follows isometric contraction of neck muscles (Duclos et al. 2004). Kluzik et al. (2005, 2007a) reported a postural post-effect of leaning that followed a period of stance on an inclined surface with eyes closed. People often report a period of ‘disorientation’ or perceptual distortion after walking on an inclined treadmill (Anstis 1995; Hashiba 1998; Hutton 1966). The mechanisms underlying these ‘carry-over’ effects are not known.
Recent studies on balance control have shown that treadmill locomotion affects body orientation in space during subsequent stance periods, without affecting body steadiness (Zanetti and Schieppati 2007). Basically, subjects tended to tilt forward after treadmill walking with respect to pre-exercise conditions, without enduring non-specific postural instability as indicated by unchanged values of body sway or sway velocity. This effect on body orientation in space was evoked both with eyes open (EO) and eyes closed (EC). It was present regardless of vision being available during the subsequent stance trials, and lasted for a few minutes. Despite the kinematic and kinetic similarities between treadmill locomotion and overground locomotion (Alton et al. 1998; Nymark et al. 2005; Riley et al. 2007), the above effect was produced only by the treadmill locomotion; hardly any effect on body orientation during stance was found after overground walking (Zanetti and Schieppati 2007).
Therefore, the effects produced by a motor task like treadmill locomotion persist after the end of the task, can be transferred from walking to posture, and modify the balance strategies normally used to maintain equilibrium in quiet stance. Perhaps, treadmill locomotion implies an increase of the central nervous system computational costs due to adaptation of the postural control mechanisms to the unusual task (Thorstensson et al. 1984). This adaptation seems to be persistent and structured and it slowly vanishes during the execution of successive quiet stance trials.
We further investigated this issue, also in the light of problems shown by patients with movement disorders when changing postural set. We hoped to gain insight into the balance control mechanism and its modulation by a previous dynamic task, focusing on the transition from locomotion to stance. Was the forward body lean previously observed after treadmill walking a non-specific effect, e.g. the search for a more stable standing position connected to the unusual locomotion task?, or is the direction of body lean dependent on the direction of walking, in the sense that a different motor programme for walking would differently affect stance post-walking? Are there kinematics or kinetic variables of the moving body related to walking direction that can give cues to the interpretation? However simple these questions may be, there is no information in the literature about post-effects of linear (forward and backward) walking. The aim of the present study was to investigate the effect of forward and backward locomotion on body posture during subsequent quiet stance periods, on the hypothesis that postural post-effects take place after both walking tasks, and that they are walking-direction specific. Therefore, we studied the occurrence, duration and extent of the post-effects produced by both forward and backward treadmill walking, and considered in some detail the mechanical events occurring during both types of locomotion, assuming that these events would be possibly responsible for the post-effects.
Experimental procedures
Participants
Ten healthy subjects participated in the study. All experimental procedures were conducted in accordance with the Declaration of Helsinki and subjects signed a written informed consent before participation. The research protocol had been approved by the local review board. There were six males and four females, aged 23–59 (mean 30.4 ± 10.5 years). Height varied from 160 to 180 cm (171.8 ± 6.8 cm). Weight varied from 50 to 75 kg (67.7 ± 9.3 kg). Foot length varied from 23 to 27.5 cm (25 ± 1.7 cm).
Task and procedures
Each subject performed two 6-min locomotor trials in the same day: treadmill forward walking (WF) and treadmill backward walking (WB), with EO. Subjects randomly started the experiments with a WF or WB trial. Before each walking task, the subjects stood in quiet stance condition (feet side-by-side at 9-cm distance) on the treadmill for six separate 60-s periods, alternately with EC and EO, starting with EC (pre-WF or pre-WB trials). Treadmill (Woodway, Germany) walking velocity was 4 km/h. Immediately after cessation of walking, a second series of six standing trials under quiet stance condition (post-WF or post-WB trials) was repeated. These periods were separated by short breaks of 5–10 s. The temporal sequence of the stance-walking-stance trials is shown in Fig. 1. A period of at least 10 min elapsed between the two stance-locomotion-stance sequences and provided recovery from any post-effect. This period was considered sufficient on the basis of the findings of a previous investigation (Zanetti and Schieppati 2007), and it was confirmed here that postural post-effect fully vanished within this interval. The stance trials were repeated three times per visual condition, both before and after walking, in order to assess the consistency of the pre-walking stabilometric data and focus on the time-course of the potential post-effects. This number was not greater in order to complete the entire experiment within one session.

Time-sequence of pre-walking stance trials, treadmill walking trials (forward, WF or backward, WB) and post-walking stance trials during each of the two parts of the experiment. Five subjects started the session with WB and five with WF. Six stabilometric trials (alternately EC and EO) preceded (pre-walking) and followed (post-walking) the treadmill walking (WF or WB) and the recovery period
Detection and analysis of centre of body pressure (CoP), joint angles and trunk inclination
During each experimental session, and during both walking and stance trials, we acquired the vertical ground reaction force and extrapolated the displacement of the body CoP by means of instrumented plantar insoles (Novel Pedar-X System, Germany). The ankle-foot and trunk-thigh angles in the sagittal plane were recorded by means of two electromagnetic goniometers (XM110 and XM180 Biometrics Ltd, UK), respectively, positioned on the right ankle and right hip. An inclinometer (Accustar II/DAS-20, USA) on dorsal thoracic region was used to acquire trunk inclination along the sagittal plane. All signals were acquired at 100 Hz. The CoP displacement, sway area and sway path, ankle and hip angles, and trunk inclination were off-line computed and analysed.
Balance assessment during quiet stance
We computed sway path (the length of the path travelled by the CoP in the foot plane), as the distance between the coordinates of the successive instantaneous CoP positions. Sway area was the surface swept during the trial by the line joining the position of the mean CoP to the successive positions of the instantaneous CoP.
Antero-posterior position of CoP and ground reaction force
The extent of body antero-posterior orientation in space during quiet stance was calculated by the mean position of the CoP along the sagittal plane, normalised for each subject to the length of the feet. For example, at 0% the mean position of the CoP would lie at the most posterior part of the plantar insole. The effect of the walking task on the CoP mean position was assessed by comparing the average value of all pre-walking and all post-walking stance trials. Moreover, we calculated the net change of the CoP position for (1) post-walking and (2) walking condition, as: (1) the difference between the mean CoP position of the post-walking and the pre-walking trials (separately for EO and EC stance trials), (2) the difference between the mean CoP position during the stance phase of walking (averaged across the 6 min walking) and its mean position during all EO pre-walking trials. The time-course of the vertical ground reaction force during the stance phase of walking was calculated from the output of the plantar insoles. Prior to averaging, the traces of all successive steps (across the 6 min walking) were normalised over time for each subject. The entire period of the stance phase was arbitrarily divided into two parts, separated by the relative minimum value of the ground reaction force during mid-stance.
Analysis of ankle and hip angles and trunk inclination
The mean net values of these angles, for both post-walking stance and walking condition, were calculated as above for the mean net CoP position. A positive net value of the ankle angle represents a plantar-flexion compared with the pre-walking stance trials; positive hip angles and trunk inclination angles correspond to hip flexion and trunk forward inclination.
Statistical analysis
The Student’s t test for paired comparison has been used for comparing mean values of walking cadence, hip and ankle angles and trunk inclination, and CoP position, between WF and WB. It has also been used for comparing the ground reaction force and the CoP position during the first and second part of the stance phase of walking. In order to check that pre-walking stance trials were comparable across conditions (in some subjects, pre-WF occurred after the rest period following the WB trial, and viceversa in other subjects), a four-way repeated-measures ANOVA was calculated for each variable acquired during pre-walking periods; this was done between the group that performed WF first and the group that performed WB first, and within the pre-walking stance trials of the first and second walking task, vision (EO-EC) and time-sequence of the stance trials. Moreover, across all subjects, the mean sway area, sway path and CoP position were separately analysed with a four-way repeated-measures ANOVA between walking directions (WF–WB), and within pre-walking and post-walking (pre–post), vision (EO–EC) and time-sequence of the stance trials. Then, we analysed the difference between post- and pre-walking body angles and CoP positions by means of three-way repeated-measures ANOVA between walking directions and vision and time-sequence. The Newman–Keuls test was used for the post-hoc comparisons. When not otherwise stated, the mean values ± SEM (standard error of the mean) are reported for all variables. The software package Statistica (StatSoft, Tulsa, USA) was used.
Results
All subjects were able to walk forward and backward at the imposed treadmill velocity. On the average, a small but significant difference was present between stride frequencies, just higher (P < 0.001) for WB (0.95 ± 0.02 Hz) than WF (0.85 ± 0.01 Hz).
Ground reaction force, CoP displacement and trunk inclination during walking (WF and WB)
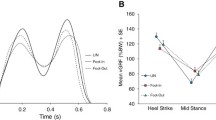
The time-course of the CoP position and of the vertical ground reaction force, for both WF and WB task, are depicted in Fig. 2. The traces show the grand average, from all the subjects, of the left foot ground reaction force (Fig. 2a, b) and of the CoP position during all stance phases of gait as a function of the mean duration of the stance phase (Fig. 2c, d). The mean values were calculated both for the first and second part of the stance phase (identified on the basis of the relative minimum value of the vertical ground reaction force), in order to highlight possible differences in ground reaction force and CoP position between the WF and WB task. This criterion was applied for both forces and CoP displacement.

a Upper panel: trace of the vertical ground reaction force during the stance phase of walking forward (WF), calculated as the mean of the average traces of every subject’s stance phases of walking (across all the steps of the 6-min of walking session). Prior to averaging, the traces of all successive steps of a subject were normalised over time. The length of the abscissa corresponds to the mean normalised duration of all stance phases. Lower panel: the average vertical ground reaction force calculated for the first and second period of the walking stance phase (the stance phase was arbitrarily divided into two parts by the relative minimum value of force). b Same as a, but for walking backward (WB). c Same as a, for the A–P CoP displacement during the stance phase of WF. d Same as c for WB
The mean ground reaction force during the first part of the stance phase was 501 ± 88 N (SD) for WF and 574 ± 102 N for WB; for the second part it was 538 ± 89 N for WF and 444 ± 87 N for WB. The means of the vertical ground reaction force, for both WF and WB condition, were significantly different between the first and second part of the stance phase (P < 0.01 for the two comparisons).
The profile of CoP displacement was almost symmetrical and the directions opposite for the two walking types (Fig. 2c, d). CoP moved in the direction from heel to toe during WF and from toe to heel during WB. Therefore, the peaks of the vertical forces in the first part of the stance phase were produced by the heel in WF and by the forefoot in WB, and vice-versa for the second part. The mean antero-posterior CoP position in the first part of the stance phase was 8.1 ± 1.4 cm for WF and 15.3 ± 1.4 cm for WB; in the second part of the stance phase it was 16.7 ± 1.1 cm for WF and 7.1 ± 1.3 cm for WB, respectively (P < 0.001, for the two comparisons).
The mean values of the net ankle and hip angles were: −2.3° ± 0.6° and 5.4° ± 1.6°, respectively, during WF; −2.7° ± 0.95° and 4.6° ± 1.8°, respectively, during WB. The angles were not different between WF and WB (P > 0.1 for both comparisons). However, the trunk inclination angle differed significantly between WF and WB. The mean net inclination was 1.62° ± 1.4° and −1.3° ± 1.4°, during WF and WB, respectively (P < 0.05). Therefore the trunk was flexed during WF and extended during WB with respect to the mean pre-walking values.
CoP position, ankle, hip angle, trunk inclination, sway path, and sway area during pre-walking trials
Since each subject performed a sequence of pre-walking trials for each walking session, we compared all the variables recorded during the stance trials before walking to be sure that: (1) the 10-min rest period was sufficient for full recovery between the two walking sessions, (2) there were no differences between the stance trials prior to each walking task. ANOVA main effects across the pre-walking stance trials (pre-WF and pre-WB) showed no differences for mean CoP position [F(1,8) = 1.4, P = 0.26], ankle [F(1,8) = 1.28, P = 0.06] and hip [F(1,8) = 0.05, P = 0.82] angle, trunk inclination [F(1,8) = 3.68, p = 0.091], sway path [F(1,8) = 3.02, P = 0.06] and sway area [F(1,8) = 1.58, P = 0.24]. No interactions were found. There was an expected significant difference between EC and EO for sway path and sway area [F(1,8) = 44.43, P < 0.001; F(1,8) = 10.13, P = 0.012, respectively].
Post-effects of walking on body stabilometric variables
Figure 3 shows typical examples of the insole-recorded CoP position as a function of time before, during and after the WF and WB trials. For each task (walking is in the middle), a 20-s time-window has been depicted. The traces of the CoP recorded immediately post-walking clearly stay over and under the mean position of the pre-walking traces, for post-WF and post-WB, respectively. In this subject, the mean antero-posterior CoP values during the stance trials were 6.42 ± 0.01 cm (pre-WF) and 6.55 ± 0.01 cm (pre-WB); the values became 8.06 ± 0.01 cm, post-WF, and 4.44 ± 0.01 cm, post-WB.

Representative traces of the CoP position along the sagittal plane before (pre-), during (central section of the traces) and after (post-) treadmill walking (WF, upper panel; WB, lower panel). In the ordinate, A is anterior and P is posterior. The origin of this axis corresponds to the most posterior part of the insole. The mean positions of the CoP during pre-WF and pre-WB conditions (thin grey lines) are similar. On the contrary, after the WF and WB trials, the CoP position stays over and below the mean of the respective pre-walking conditions. The traces during WF and WB trials reveal an opposite direction of the CoP movement (from heel to toe during WF and vice-versa during WB)
Figure 4 A shows the CoP oscillations on the horizontal plane, during three EC stance trials, depicted on the same reference axes: a pre-walking trial (middle panel, pre-W), a post-WF and post-WB trials (right and left panel, respectively). For reference, the mean stick diagrams of the pre-W, post-WF and post-WB are pasted over the respective stabilograms to broadly show the body orientation in space along the sagittal plane. The traces of the CoP oscillations during the three trials were clearly separated along the antero-posterior direction (horizontal in the Figure), indicating a strong post-effect of the direction of walking on the pitch orientation of the body.

a Representative stabilograms of one subject and the respective mean stick diagrams during three EC stance trials. All the three stabilograms are displayed on the same coordinate system (A anterior, R right): they show the CoP sway during pre-walking forward (centre, pre-W), post-walking forward (right post-WF) and post-walking backward (left post-WB) trials. b The data points represent the mean sway area plotted against the mean antero-posterior CoP position (in % of foot length), calculated for the pre-walking trials (Pre; the two centre circles all trials collapsed) and for post-walking trials (Post; triangles, diamonds and squares; the time-sequence is indicated as I, II and III) for both eyes open (EO) and eyes closed (EC) condition. The points on the right originate from the post-WF trials and the points on the left originate from the post-WB trials
Figure 4b represents a summary of the sway area values plotted against the corresponding mean CoP positions, across all subjects and stance trials, for EO and EC. In the plot, the pre-walking values have been collapsed within visual conditions for clarity of presentation. Since a sequence of six stance trials (alternately EC and EO) had been completed post-walking (for both WF and WB), the corresponding data points have been identified. Four-way ANOVA (vision, pre-post, WF-WB, time-sequence) showed an effect of vision (F(1,18) = 24.52, P < 0.01) and time-sequence on sway area [F(2,36) = 3.49, P < 0.05]. There was a significant interaction between vision and time-sequence [F(2,36) = 3.74, P < 0.05]. The post-hoc test revealed an effect of time-sequence on post-walking trials (P < 0.05, for all the comparisons). The sway area values occurring in the first post-walking (WF and WB) EC stance trials were slightly larger than the others (but not significantly so). This trend towards larger sway of the very first stance trials after walking is the consequence of the CoP being displaced forward or backward by the post-effects of WF and WB; it has been already shown that forward or backward voluntary body leanings during stance are indeed associated with increased sway area (Schieppati et al. 1994). When the sway path values were compared by the same-design ANOVA, no effects were observed except for vision [F(1,18) = 60.72, P < 0.001].
CoP position during pre- and post-walking stance trials
In order to simplify the representation of the effects of treadmill walking on body orientation, we compared the mean CoP positions (for EC and EO, all pre-WF and pre-WB stance trials) to the mean of all post-walking trials (WF and WB) under corresponding visual conditions (Fig. 5a). The three-way ANOVA (WF–WB, pre-post, vision) showed an effect of walking direction on the CoP position [F(1,18) = 5.06, P < 0.05]. Further, there was a significant interaction between walking direction and pre–post [F(1,18) = 54.2, P < 0.001]. WF increased forward lean and WB increased backward lean, for both EC and EO condition (P < 0.001, for all the four comparisons). In order to study the time-evolution of the post-walking CoP position, we made a paired t test analysis between the mean CoP position for pre-walking conditions (time-sequence collapsed) and the mean CoP position for each of the post-walking stance trials in the sequence (not shown in the Figure). There was a significant difference for all comparisons (P < 0.02). Therefore, the post-effects on body leaning were still evident even 6 min after the end of walking.

a Mean CoP position calculated during all pre-walking and all post-walking stance trials (pre- and post-histograms, respectively; time-sequence of the stance trials collapsed) for both EO and EC condition. Compared with pre-walking, CoP was ahead post-WF and was behind post-WB, for both EC and EO. b The mean CoP position of each subject during the post-walking stance trials (both for walking directions and vision conditions, time-sequence of the stance trials collapsed) are plotted against the mean CoP position calculated for all pre-walking stance trials. The data points for post-WB lay below the identity line (broken line), for both EC and EO (filled and open circles, respectively). On the contrary, the data points for post-WF lay over the identity line (filled and open diamonds). The post-effects of walking were common to all subjects
The plot of Fig. 5b shows that these post-effects were common to all subjects. In the graph, the post-walking CoP values are plotted against the pre-walking values (time-sequence collapsed, for both post- and pre-walking CoP values). Regardless of the visual condition, all data points post-WF and all data points post-WB (except one) lay clearly above and below the identity line, respectively.
Net CoP position, ankle and hip angle, and trunk inclination
To understand if and how body segment position recovered across time and conditions, we analysed the post-effects of walking on (1) net CoP positions, (2) net ankle angle, (3) net hip angle, and (4) net trunk inclination. These data were calculated as the difference between the mean of each single post-walking trial and the mean of all pre-walking trials.
The three-way ANOVA (WF–WB, vision, time-sequence) showed an effect of walking direction on CoP position [F(1,18) = 54.21, P < 0.001]. There was an interaction between WF–WB and vision [F(1,18) = 13.06, P < 0.005] (Fig. 6a). There was an almost significant interaction between WF–WB and time-sequence [F(2,36) = 3.08, P = 0.058]. The post-hoc analysis revealed a difference between the first post-WF trial and the subsequent two trials, visual condition collapsed (P < 0.05 for both comparisons).

a Mean net A–P CoP positions calculated as a function of the sequence of the stance trials (EO, EC, post-WF, post-WB). b Same as a for the mean net ankle angles. c Same as a for mean net hip angles. d Same as a for mean net trunk inclination angles. The net values are calculated as the difference between the post-walking and the pre-walking values. For panels a and d, A is anterior and P is posterior; for b and c, E is extension and F is flexion
ANOVA of the ankle angle showed a main effect of WF–WB [F(1,18) = 90.35, P < 0.001] and an interaction between vision and time-sequence [F(2,36) = 5.5, P < 0.01] (Fig. 6b). The post-hoc analysis revealed a difference between the first post-walking trial (for both WF and WB) and the subsequent two trials, for the EC condition (P < 0.001 for both comparisons).
There was a slight, but significant increment in the mean values of the hip angle over time. ANOVA showed a main effect of WF–WB [F(1,18) = 25.04, P < 0.001] and of time-sequence [F(2,36) = 4.56, P < 0.02] (Fig. 6c]. There was no interaction. The post-hoc analysis within the time-sequence (WF–WB and vision collapsed) revealed a difference between the first post-walking trial and the last trial (P < 0.02, for both WF and WB).
The trunk angle showed larger effects in the post-WB than post-WF trials. ANOVA showed a main effect for WF–WB [F(1,9) = 15.93, P < 0.005], no effect for vision and time-sequence, and an interaction between walking direction, vision and time-sequence [F(2,36) = 3.55, P < 0.05] (Fig. 6d). The post-hoc analysis revealed a difference between the first post-WB trial and the successive trials, for both EO and EC (P < 0.03, for all the comparisons), except for the last EO trial.
Correlation of kinematic and kinetic data between walking and post-walking
Considering that the net trunk inclination significantly changed between WF and WB, we correlated across all subjects the trunk inclination during walking with the net CoP positions of the post-walking stance trials (separately for WF and WB). No significant correlations between these variables were found (r² < 0.001, P = 0.96, and r² < 0.001, P = 0.81, for WF and WB, respectively). No significant correlations existed between hip or ankle net angle during WF or WB walking and CoP position (not shown in Figure). However, we found a significant correlation between trunk inclination during walking and trunk inclination during the first post-walking EC stance trial (r² = 0.46, P < 0.05, and r² = 0.44, P < 0.05, for WF and WB, respectively) (Fig. 7a). In turn, the CoP position during the stance phases of the WF trial was correlated with the CoP position during the first post-WF stance trial (r² = 0.48, P < 0.05); analogous correlation for WB values did not reach significance (r² = 0.28, P = 0.11) (Fig. 7b). From the graph of Fig. 7b, it can be seen that the mean position of the CoP throughout the stance phase of walking was more advanced in WF than WB trials (20 ± 2.8% for WF and 9.8 ± 2.4% for WB). These values were significantly different (P < 0.001).

a The mean net trunk inclination of each subject, during walking forward and backward condition (open circles and filled diamonds, respectively), is plotted against the net trunk inclination during the first post-walking EC trial (separately for walking forward and walking backward). Positive values (A is anterior, P is posterior) indicate forward trunk bending compared to the mean trunk angle during pre-walking trials. b Same as a, for mean net CoP position. CoP positive values indicate advanced CoP mean position compared with the CoP position during pre-walking trials
Discussion
Post-effects of walking on subsequent stance periods
Treadmill walking has clear-cut post-effects on body posture. Subjects showed a forward and backward incline after treadmill WF and WB, respectively, compared to control pre-walking values. This was true regardless of the order of WF and WB trials during the session. The effect was present with both EC and EO; its magnitude was smaller, but not absent, when standing with EO. Therefore, the effect of vision on the control of the vertical position of the standing body (Schieppati et al. 1994; Dyde et al. 2006) may not be enough to fully counteract the ‘carry-over’ effects of walking. Treadmill walking did not affect body steadiness, as witnessed by unchanged values of post-walking sway area or length of sway path during stance. This indicates that treadmill exercise did not induce muscle fatigue, since the latter would have increased sway (Lepers et al. 1997; Nardone et al. 1997, 1998). If anything, there were non-significantly larger sway values in the very first EC stance trials after walking, which corresponded to the most advanced and rearmost CoP positions, for WF and WB, respectively; these minor increases depend on the known relationship between CoP position and body sway during stance (Schieppati et al. 1994). The post-effects of walking were transitory, for both post-WF and post-WB trials. However, the effects did not completely vanish within the limited time (6 min) of the acquisition of stance trials after the walking sessions, indicating a considerable retention. The post-effects vanished instead within 10 min from the last stance trial, i.e. before the second series of pre-walking stance trials commenced.
These findings demonstrate that treadmill walking affects body orientation in space during subsequent quiet stance periods, and that the direction of walking qualitatively affects body orientation. The data confirm those of a previous preliminary investigation in a different study population, in which forward treadmill walking produced an abnormally forward-inclined tilt in subsequent stance tasks. The effect was negligible after normal ground walking (Zanetti and Schieppati 2007), which explains why we chose treadmill instead of overground walking in the present investigation aimed to address direction-specific effects of walking on stance. Treadmill walking may require a peculiar control because, in spite of largely equivalent kinematics (Riley et al. 2007), it has some key differences with respect to overground locomotion. During treadmill walking, frequency of gait cycle increases, whereas stride length (Stolze et al. 1997) and the duration of the stance phase decrease (Alton et al. 1998) compared to overground walking. Moreover, treadmill walking is associated with reductions in locomotor variability, primarily at the distal lower extremity, and with improvements in local dynamic stability (Dingwell et al. 2001). Significant differences for some angular lumbar spine movement parameters between overground and treadmill walking have also been shown (Vogt et al. 2002); joint moments are different in the sagittal plane and joint powers different at knee and hip joints (Lee and Hidler 2008).
Reversing from forward- to backward treadmill walking features a decrease in gait velocity, stride length, and duration of swing phase, and an increase in the double-support phase (Grasso et al. 1998). During WB, there is a switch between ankle flexor and extensor muscles with flexor activation during the support phase. The bursts of activity in the knee extensors are prolonged and shifted to the main part of the support phase. In the hip extensors, the periods of EMG activity retain their positions relative to the leg movements, but their function changes due to the reversed direction of movement (Borghese et al. 1996; Lee and Hidler 2008; Thorstensson 1986). Reflex changes in the soleus muscle occur during WB, that are likely part of the motor programme controlling backward walking (Schneider and Capaday 2003). Moreover, the mean activity over the gait cycle is generally higher in WB than in WF gait, suggesting a greater level of energy expenditure in the former (Cipriani et al. 1995; Grasso et al. 1998). For the above reasons, WB was expected to be a task adapted to the hypotheses at hand and to carry specific post-effects with respect to forward walking.
Since WB certainly requires a stronger control than WF, any non-specific post-effect of treadmill walking would have been necessarily emphasised, producing larger forward inclination and perhaps larger body sway. This was not confirmed: the direction of the CoP displacement during stance was opposite post-WB with respect to post-WF, and no abnormal sway was observed.
Treadmill walking is an appropriate protocol for addressing the existence and type of functional effects on the circuits controlling posture. It leaves a trace on the body orientation in space during subsequent stance periods, and this post-effect is related to the direction of walking. During walking, the body adapts its inclination to the task, so that, after stopping, the adopted posture is, for a whilst, unable to maintain the normal inclination on firm ground. Thereafter, the body adapts again to the more usual condition, as witnessed by the progressive return to vertical position.
Possible mechanisms responsible for the effects on body orientation
Although the experimental protocol employed in the present investigation did not give evidence about the neurophysiological mechanisms responsible for the change in body orientation in space following locomotion, the recorded kinematic and kinetic variables offer some clues as to the possible causes.
The vertical force during walking was differently distributed for WF than WB: it was higher on the forefoot in the first part of the stance phase during WB, whilst it was only moderately differently distributed between the first and second parts of the stance phase (backfoot and forefoot on the ground, respectively) during WF. In principle, therefore, this different pattern might explain the opposite body orientation in post-walking phase, as a result of differently distributed force feed-back during walking (Grey et al. 2007). A similar difference probably occurs also during a period of standing on a toe-up inclined surface compared to standing on flat ground: after the incline, during normal stance again, subjects show a forward body tilt (Kluzik et al. 2005). Kavounoudias et al. (1998, 1999), using asymmetric vibratory stimulation of plantar soles, suggested that the CNS can deduce body position cues from the relative plantar pressure distributions. However, our findings did not show any correlation between the extent of vertical force differences in the first and second part of the stance phase of gait and in the post-walking CoP position, either for WF or WB.
The lower limb joint angles had a generally similar peak-to-peak excursion and mean value, during WF and WB. This was true for both ankle and hip angles. The similar profile, in fact, was not affected by the time-course of their cyclic changes, being symmetric between WF and WB, in keeping with previously published data (Grasso et al. 1998). Probably because the angles started from and returned to the same value during each gait cycle, they did not explain the post-walking body orientation effects. In fact, across the individual subjects, there was no correlation between hip and ankle angle during WF or WB walking and CoP position in post-walking stance trials.
The trunk is normally forward inclined during treadmill forward locomotion, the mean inclination increasing with treadmill speed (Alton et al. 1998; Thorstensson et al. 1984). Also in our hands the trunk was significantly more flexed during WF than WB. This reflects the mechanical advantage of the position of the centre of mass, being relatively ahead of the foot position in the direction of the progression (Brenière 1996). This must obviously be true for both forward and backward progression. The different trunk orientation in space, necessarily associated with the direction of walking, might therefore be a factor explaining the different post-walking body orientation (Mazibrada et al. 2008). During the post-walking stance trials, trunk orientation in space (more flexed after WF, less so after WB) was correlated, in all subjects, with the trunk orientation observed during walking. Therefore, the trunk attitude was transferred from walking to stance and most likely contributed to the more forward or backward CoP shift during stance after WF and WB, respectively.
A difference between WF and WB also existed in the temporal profile of the CoP displacement along the foot soles during the stance phase of walking. The direction of the application point of the ground reaction force moved from the heel to toes during WF and from toes to heel during WB. In addition, there was an overall trend for the CoP position during the walking cycles to be displaced more forward, along the foot sole, during WF than WB. Kinaesthesia and body orientation in space can be affected by cutaneous afferent input from the foot sole (Magnusson et al. 1990; Bernard-Demanze et al. 2004; Meyer et al. 2004; Nakajima et al. 2006). We would suggest that the opposite pattern in the direction of the foot-sole stimulation during WF and WB may also be related to the opposite body orientation in post-walking stance trials.
Functional significance of the post-effects
What is the purpose of these walking-induced direction-specific adaptations of body attitude during quiet stance? We argue that any adaptation must fit a goal, and that this goal would not be contradictory to the adaptation-producing event(s). One might conjecture that these post-effects would favour re-start of walking in the same direction shortly after a halt. Since under quiet stance the mean position of CoP virtually coincides with the projection of the centre of mass (Morasso and Schieppati 1999), being forward-inclined favours initiation of locomotion, and is normally produced as an anticipatory postural adjustment before start off (Brenière and Do 1991; Crenna and Frigo 1991). In principle, the same condition (but now leaning backwards) would be true for initiating backward locomotion (Takeuchi et al. 2007).
The results of this study may give deeper insight into the problems related to the control of changes between different postural sets that appear in elderly people and under pathological conditions. The treadmill might be a simple aid for correcting abnormal postural attitudes or reinforcing good ones.
References
Alton F, Baldey L, Caplan S, Morrissey MC (1998) A kinematic comparison of overground and treadmill walking. Clin Biomech (Bristol, Avon) 13:434–440. doi:10.1016/S0268-0033(98)00012-6
Anstis S (1995) After-effects from jogging. Exp Brain Res 103:476–478. doi:10.1007/BF00241507
Bernard-Demanze L, Burdet C, Berger L, Rougier P (2004) Recalibration of somesthetic plantar information in the control of undisturbed upright stance maintenance. J Integr Neurosci 3:433–451. doi:10.1142/S0219635204000580
Borghese NA, Bianchi L, Lacquaniti F (1996) Kinematic determinants of human locomotion. J Physiol 494:863–879
Bove M, Diverio M, Pozzo T, Schieppati M (2001) Neck muscle vibration disrupts steering of locomotion. J Appl Physiol 91:581–588
Brenière Y (1996) Why we walk the way we do. J Mot Behav 28:291–298
Brenière Y, Do MC (1991) Control of gait initiation. J Mot Behav 23:235–240
Capicíková N, Rocchi L, Hlavacka F, Chiari L, Cappello A (2006) Human postural response to lower leg muscle vibration of different duration. Physiol Res 55:129–134
Cipriani DJ, Armstrong CW, Gaul S (1995) Backward walking at three levels of treadmill inclination: an electromyographic and kinematic analysis. J Orthop Sports Phys Ther 22:95–102
Courtine G, Pozzo T, Lucas B, Schieppati M (2001) Continuous, bilateral Achilles’ tendon vibration is not detrimental to human walk. Brain Res Bull 55:107–115. doi:10.1016/S0361-9230(01)00504-4
Courtine G, De Nunzio AM, Schmid M, Beretta MV, Schieppati M (2007) Stance- and locomotion-dependent processing of vibration-induced proprioceptive inflow from multiple muscles in humans. J Neurophysiol 97:772–779. doi:10.1152/jn.00764.2006
Crenna P, Frigo C (1991) A motor programme for the initiation of forward-oriented movements in humans. J Physiol 437:635–653
De Nunzio AM, Schieppati M (2007) Time to reconfigure balancing behaviour in man: changing visual condition while riding a continuously moving platform. Exp Brain Res 178:18–36. doi:10.1007/s00221-006-0708-z
De Nunzio AM, Nardone A, Schieppati M (2005) Head stabilization on a continuously oscillating platform: the effect of a proprioceptive disturbance on the balancing strategy. Exp Brain Res 165:261–272. doi:10.1007/s00221-005-2297-7
Derave W, Tombeux N, Cottyn J, Pannier JL, De Clercq D (2002) Treadmill exercise negatively affects visual contribution to static postural stability. Int J Sports Med 23:44–49. doi:10.1055/s-2002-19374
Diekmann V, Jürgens R, Becker W (2004) Maintaining spatial body alignment on a rotating platform by means of active counter-circling: role of vestibular and podokinesthetic afferents. Exp Brain Res 158:504–518. doi:10.1007/s00221-004-1921-2
Dingwell JB, Cusumano JP, Cavanagh PR, Sternad D (2001) Local dynamic stability versus kinematic variability of continuous overground and treadmill walking. J Biomech Eng 123:27–32. doi:10.1115/1.1336798
Duclos C, Roll R, Kavounoudias A, Roll JP (2004) Long-lasting body leanings following neck muscle isometric contractions. Exp Brain Res 158:58–66. doi:10.1007/s00221-004-1871-8
Duclos C, Roll R, Kavounoudias A, Roll JP, Forget R (2007) Vibration-induced post-effects: a means to improve postural asymmetry in lower leg amputees? Gait Posture 26:595–602. doi:10.1016/j.gaitpost.2006.12.005
Dyde RT, Jenkin MR, Harris LR (2006) The subjective visual vertical and the perceptual upright. Exp Brain Res 173:612–622. doi:10.1007/s00221-006-0405-y
Grasso R, Bianchi L, Lacquaniti F (1998) Motor patterns for human gait: backward versus forward locomotion. J Neurophysiol 80:1868–1885
Grey MJ, Nielsen JB, Mazzaro N, Sinkjaer T (2007) Positive force feedback in human walking. J Physiol 581:99–105. doi:10.1113/jphysiol.2007.130088
Hashiba M (1998) Transient change in standing posture after linear treadmill locomotion. Jpn J Physiol 48:499–504. doi:10.2170/jjphysiol.48.499
Hutton RS (1966) Kinesthetic after-effect produced by walking on a gradient. Res Q 37:368–374
Ivanenko YP, Grasso R, Lacquaniti F (2000) Influence of leg muscle vibration on human walking. J Neurophysiol 84:1737–1747
Kavounoudias A, Roll R, Roll JP (1998) The plantar sole is a ‘dynamometric map’ for human balance control. Neuroreport 9:3247–3252. doi:10.1097/00001756-199810050-00021
Kavounoudias A, Roll R, Roll JP (1999) Specific whole-body shifts induced by frequency-modulated vibrations of human plantar soles. Neurosci Lett 266:181–184. doi:10.1016/S0304-3940(99)00302-X
Kluzik J, Horak FB, Peterka RJ (2005) Differences in preferred reference frames for postural orientation shown by after-effects of stance on an inclined surface. Exp Brain Res 162:474–489. doi:10.1007/s00221-004-2124-6
Kluzik J, Horak FB, Peterka RJ (2007a) Postural after-effects of stepping on an inclined surface. Neurosci Lett 413:93–98. doi:10.1016/j.neulet.2006.11.034
Kluzik J, Peterka RJ, Horak FB (2007b) Adaptation of postural orientation to changes in surface inclination. Exp Brain Res 178:1–17. doi:10.1007/s00221-006-0715-0
Lee SJ, Hidler J (2008) Biomechanics of overground versus treadmill walking in healthy individuals. J Appl Physiol 104:747–755. doi:10.1152/japplphysiol.01380.2006
Lepers R, Bigard AX, Diard JP, Gouteyron JF, Guezennec CY (1997) Posture control after prolonged exercise. Eur J Appl Physiol Occup Physiol 76:55–61. doi:10.1007/s004210050212
Magnusson M, Enbom H, Johansson R, Wiklund J (1990) Significance of pressor input from the human feet in lateral postural control. The effect of hypothermia on galvanically induced body-sway. Acta Otolaryngol 110:321–327
Marigold DS, Patla AE (2005) Adapting locomotion to different surface compliances: neuromuscular responses and changes in movement dynamics. J Neurophysiol 94:1733–1750. doi:10.1152/jn.00019.2005
Mazibrada G, Tariq S, Pérennou D, Gresty M, Greenwood R, Bronstein AM (2008) The peripheral nervous system and the perception of verticality. Gait Posture 27:202–208. doi:10.1016/j.gaitpost.2007.03.006
Meyer PF, Oddsson LI, De Luca CJ (2004) The role of plantar cutaneous sensation in unperturbed stance. Exp Brain Res 156:505–512. doi:10.1007/s00221-003-1804-y
Morasso PG, Schieppati M (1999) Can muscle stiffness alone stabilize upright standing? J Neurophysiol 82:1622–1626
Nakajima T, Sakamoto M, Tazoe T, Endoh T, Komiyama T (2006) Location specificity of plantar cutaneous reflexes involving lower limb muscles in humans. Exp Brain Res 175:514–525. doi:10.1007/s00221-006-0568-6
Nardone A, Tarantola J, Giordano A, Schieppati M (1997) Fatigue effects on body balance. Electroencephalogr Clin Neurophysiol 105:309–320. doi:10.1016/S0924-980X(97)00040-4
Nardone A, Tarantola J, Galante M, Schieppati M (1998) Time course of stabilometric changes after a strenuous treadmill exercise. Arch Phys Med Rehabil 79:920–924. doi:10.1016/S0003-9993(98)90088-0
Nieuwenhuijzen PH, Duysens J (2007) Proactive and reactive mechanisms play a role in stepping on inverting surfaces during gait. J Neurophysiol 98:2266–2273. doi:10.1152/jn.01226.2006
Nymark JR, Balmer SJ, Melis EH, Lemaire ED, Millar S (2005) Electromyographic and kinematic nondisabled gait differences at extremely slow overground and treadmill walking speeds. J Rehabil Res Dev 42:523–534. doi:10.1682/JRRD.2004.05.0059
Richards JT, Mulavara AP, Bloomberg JJ (2007) The interplay between strategic and adaptive control mechanisms in plastic recalibration of locomotor function. Exp Brain Res 178:326–338. doi:10.1007/s00221-006-0738-6
Riley PO, Paolini G, Della Croce U, Paylo KW, Kerrigan DC (2007) A kinematic and kinetic comparison of overground and treadmill walking in healthy subjects. Gait Posture 26:17–24. doi:10.1016/j.gaitpost.2006.07.003
Schieppati M, Hugon M, Grasso M, Nardone A, Galante M (1994) The limits of equilibrium in young and elderly normal subjects and in parkinsonians. Electroencephalogr Clin Neurophysiol 93:286–298. doi:10.1016/0168-5597(94)90031-0
Schmid M, Schieppati M (2005) Neck muscle fatigue and spatial orientation during stepping in place in humans. J Appl Physiol 99:141–153. doi:10.1152/japplphysiol.00494.2004
Schneider C, Capaday C (2003) Progressive adaptation of the soleus H-reflex with daily training at walking backward. J Neurophysiol 89:648–656. doi:10.1152/jn.00403.2002
Sorensen KL, Hollands MA, Patla E (2002) The effects of human ankle muscle vibration on posture and balance during adaptive locomotion. Exp Brain Res 143:24–34. doi:10.1007/s00221-001-0962-z
Stolze H, Kuhtz-Buschbeck JP, Mondwurf C, Boczek-Funcke A, Johnk K, Deuschl G et al (1997) Gait analysis during treadmill and overground locomotion in children and adults. Electroencephalogr Clin Neurophysiol 105:490–497. doi:10.1016/S0924-980X(97)00055-6
Takeuchi Y, Tanaka Y, Shimomura Y, Iwanaga K, Katsuura T (2007) The effect of aging on the backward stepping reaction as estimated from the velocity of center of foot pressure and muscular strength. J Physiol Anthropol 26:185–189. doi:10.2114/jpa2.26.185
Thorstensson A (1986) How is the normal locomotor program modified to produce backward walking? Exp Brain Res 61:664–668. doi:10.1007/BF00237595
Thorstensson A, Nilsson J, Carlson H, Zomlefer MR (1984) Trunk movements in human locomotion. Acta Physiol Scand 121:9–22
Vogt L, Pfeifer K, Banzer W (2002) Comparison of angular lumbar spine and pelvis kinematics during treadmill and overground locomotion. Clin Biomech (Bristol, Avon) 17:162–165. doi:10.1016/S0268-0033(01)00111-5
Wierzbicka MM, Gilhodes JC, Roll JP (1998) Vibration-induced postural posteffects. J Neurophysiol 79:143–150
Zanetti C, Schieppati M (2007) Quiet stance control is affected by prior treadmill but not overground locomotion. Eur J Appl Physiol 100:331–339. doi:10.1007/s00421-007-0434-7
Acknowledgments
This investigation was supported by the grants PRIN 2005 no. 2005059738. We thank Dr Antonio Nardone for critical reading and Dr Rosemary Allpress for English editing of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
De Nunzio, A.M., Zanetti, C. & Schieppati, M. Post-effect of forward and backward locomotion on body orientation in space during quiet stance. Eur J Appl Physiol 105, 297–307 (2009). https://doi.org/10.1007/s00421-008-0903-7
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00421-008-0903-7