
Summary
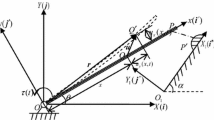
In this article, a comparative study of the control for the repetitive impacting elastic link with parametrically excited base in rotational motion is considered. First, a sliding mode control strategy based on linearized inverse model is designed and employed to suppress the vibrations of the elastic beam after the impact. The control concept involves the usage of an adaptive plant inverse model as controller in feedforward configurations. Next, a linear controller is designed via Lyapunov-Floquet transformation. In this approach, the time-periodic equations of motion are transformed into a time-invariant form, which is suitable for the application of standard time-invariant controller-design techniques. Finally, a fuzzy logic controller is applied for the nonlinear model of the impacting system. The momentum balance method and an empirical coefficient of restitution is used in the collision.
Article PDF
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Author information
Authors and Affiliations
Additional information
Received 27 January 1999; accepted for publication 3 June 1999
Rights and permissions
About this article
Cite this article
Marghitu, D., Diaconescu, C. Control techniques for impacting flexible systems. Archive of Applied Mechanics 69, 555–568 (1999). https://doi.org/10.1007/s004190050243
Issue Date:
DOI: https://doi.org/10.1007/s004190050243