
Abstract
The objective of this paper is to provide a computational method to analyze free vibrations of advanced composite plates in thermal environments according to a recently developed higher-order shear deformation theory. This method is based upon the assumptions that displacements field include just four unknowns and considers a combination of trigonometric and exponential shear shape functions which satisfy shear stress free boundary conditions on the plate surfaces. The FG plates are simply supported and subjected to uniform, linear, nonlinear and sinusoidal temperature rise. The temperature field considered is assumed to vary in the thickness direction and constant in the axial directions of plates. It is supposed that the constituent materials possess temperature-dependent properties changing across the thickness with a simple power law function. The equations of motion are obtained by employing Hamilton’s principle and solved based on Navier’s method to determine natural frequencies of the FG plate. A parametric study for FGM plates with different values of power law index and under different sets of thermal environmental conditions has been carried out. The obtained results are compared for temperature-dependent and temperature-independent FG Plates and validated with available results in the literature.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Functionally graded materials (FGMs) are a new family of advanced composites. They are fabricated from the combination of ceramics that provides a high temperature resistance due to its low thermal conductivity and metals which possess good fracture toughness [1]. FGMs are characterized by a smooth and continuous variation of mechanical properties along their thickness to avoid material discontinuity and interface problems, diminishing therefore thermal stress concentrations and deflections [2]. Nowadays, these new materials are widely used as structural components exposed to higher temperature fields such as thermal barrier coatings for ceramic engines, gas turbines, nuclear fusions, optical thin layers, biomaterial electronics, etc. [3,4,5,6,7,8,9,10]. Thus, it is important to develop analysis methods to study the behavior and the response of FGMs under different mechanical loading and environmental conditions.
The literature review reveals that many researchers developed different theories to study the thermo-mechanical [11,12,13,14] and dynamic [15,16,17,18,19] behaviors of functionally graded structural components. Based on Reddy’s higher-order shear deformation plate theory, Shen [20] analyzed nonlinear bending of a simply supported functionally graded rectangular plate under a sinusoidal or transverse uniform load in thermal environments. This study was extended by Yang and Shen [21] to provide analytical solutions for nonlinear free and forced vibration of FGM plates in thermal environments with different boundary conditions. Huang et al. [22] studied the nonlinear vibration and dynamic response of temperature dependent FG plates in thermal environment based on the higher-order shear deformation theory. Vibration characteristics of pre-stressed temperature-dependent FG rectangular plates were studied by Kim [23] using the Rayleigh–Ritz method based on the third-order shear deformation theory. Chen et al. [24] derived nonlinear partial differential equations for the vibration motion of an initially stressed temperature-independent FGP. By using a quasi-3D HSDT, Zenkour and Alghamdi [25] analyzed the response of FG sandwich plates subjected to thermal load. Li et al. [26] studied the free vibration of functionally graded material beams with surface-bonded piezoelectric layers in thermal environment. Shariyat [27, 28] analyzed the linear and nonlinear bending response of sandwich plate under thermo-mechanical loads based on generalized 3D high-order double superposition global–local theory, respectively. Free vibration analysis of symmetric FGM beams subjected to initial thermal stresses was performed by Mahi et al. [29]. Shahrjerdi et al. [30] investigated the temperature-dependent free vibration of solar functionally graded plates subjected to uniform, linear, nonlinear, heat-flux and sinusoidal temperature fields were investigated by using a second-order shear deformation theory (SSDT). Kiani and Eslami [31] studied the buckling and Post-buckling behaviors of imperfect temperature-dependent sandwich plates with functionally graded material (FGM) face sheets on elastic foundation under uniform temperature rise loading. Based on the FSDT, the dynamic behavior of FG Plates in thermal environment supposed to a moving load and elastic foundation was studied by Malekzadeh and Monajjemzadeh [32] by including the effects of initial thermal stresses. Zhang [33] studied the nonlinear bending of FGM rectangular plates with various supported boundaries resting on two-parameter elastic foundations under thermal effect by using physical neutral surface and high-order shear deformation theory. Thermal vibrations of a reinforced orthotropic beams with fibers functionally oriented and graded along the thickness direction are analyzed by Nejati et al. [34] in which uniform thermal distribution was applied throughout the beam and property of the fiber functionally graded beam considered temperature-dependent. The Hierarchical Trigonometric Ritz Formulation (HTRF) had been applied by Fazzolari [35] to study free vibration and thermal stability of FG sandwich plates. The free vibration responses of temperature dependent FG curved panels under thermal environment were analyzed by Kar and Panda [36]. Attia et al. [37] presented four variable higher-order shear deformation theories to analyze free vibration of temperature dependent FG plates. Ibrahimi and Barati [38] presented a theoretical study for thermo-mechanical buckling of size-dependent magneto-electro-thermo-elastic functionally graded (METE-FG) nanoplates in thermal environments based on a refined trigonometric plate theory. The effect of porosities on the vibration of functionally graded rectangular plates subjected to different temperature fields had been studied by Wang and Zu [39]. A novel hyperbolic shear deformation theory for free vibration analysis of simply supported functionally graded plates in thermal environment was developed by Taleb et al. [40]. Shahsavari et al. [41] developed a novel quasi-3D hyperbolic theory to investigate the free vibration of FG plates with porosities resting on Winkler/Pasternak/Kerr foundation. Thang et al. [42] studied the elastic buckling and free vibration of porous-cellular plates with uniform and non-uniform porosity distributions. Based on higher-order shear deformation theory with eight-unknowns, Tu et al. [43] analyzed the vibration of functionally graded plates in thermal environments.
As seen from the above literature review, researchers are getting a real interest in investigating the free vibration of FG structures in thermal environment; this is due to the widespread use of engineering structures including FGM in high temperature environments. Thus, the aim of this work is to extend a recently developed shear deformation theory by Zaoui et al. [44] for providing a computational model for free vibration of functionally graded plates in thermal environments. The displacement fields of the proposed theory include undetermined integral terms and contain fewer unknowns. The novelty of this theory is the use of a new shear strain shape function which is a combination of exponential and trigonometric shear deformation shape functions that considers an adequate distribution of the transverse shear strains across the plate thickness and tangential stress-free boundary conditions on the plate boundary surface without introducing a shear correction factor. The FG plates are considered simply supported and subjected at the upper and lower surfaces to uniform, linear, nonlinear and sinusoidal thermal conditions. Mechanical properties are assumed to be temperature-dependent and varying through the thickness according to a simple power law distribution. The energy method is used to determine the equations of motion which are solved based on Fourier series that satisfy the boundary conditions. The obtained results are validated by comparing them with the results of other studies. The influence of material compositions, plate geometry and temperature fields on the natural frequencies of FG plates are analyzed.
2 Computational modeling
2.1 Material properties
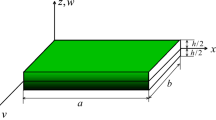
In this work, a rectangular plate with uniform thickness h, length a and width b, made of FGM (Fig. 1), is considered. The rectangular Cartesian coordinate system x, y, z has the surface \(z=0\), coinciding with the mid-plane of the plate. The material properties are taken to be temperature-dependent and vary continuously through the thickness according to the following power law variation expression [23, 30]
where \(\Gamma \) represents the effective material property such as Young’s modulus E, the Poisso’s ratio \(\nu \), mass density \(\rho \) and the thermal expansion coefficients\(\alpha \) of FG plates. \(P_{c} \) and \(P_{m}\) are the temperature-dependent properties of ceramic and metal, respectively. \(V_{c}\) is the volume fraction of the ceramic constituent of the FGM and p is the power-law index that indicates the material variation profile within the thickness [45]. As assumed, the constituent materials possess temperature-dependent properties which can be expressed as a function of temperature [45,46,47]
where P indicates material property and T signifies the environment temperature. \(P_{-1} \), \(P_{0} \), \(P_{1}\), \(P_{2} \) and \(P_{3} \) are coefficients of temperature in Kelvin and are unique to each constituent. Specific values of these constituents of some FGP material components used in this study are presented in Table 1 [47]. The Poisson ratio \(\nu \) and thermal conductivity k are assumed to be temperature independent due to their small variation with temperature.

Schematic representation of rectangular FG plate
2.2 Temperature field
In this work, four cases of one-dimensional temperature variation according to the thickness are considered, with \(T=T(z)\)
2.2.1 Uniform temperature
In this case, a uniform temperature field is utilized as given below
where T(z) indicates the temperature change, \(\Delta T(z)\) is the temperature rise only through the thickness direction and \(T_{0} =300(K)\) is room temperature.
2.2.2 Linear temperature
Supposing temperatures \(T_{b} \) and \(T_{t}\) are imposed at the bottom and top of the plate, the temperature field under linear temperature rise through the thickness can be expressed as
where \(\Delta T=T_{t} -T_{b} \) specifies the temperature gradient and \(T_{0} =300(K)\) is room temperature
2.2.3 Nonlinear temperature
The influence of nonlinear temperature rise is considered across the plate’s thickness. This field of temperature is defined by solving the one dimensional steady-state heat conduction equation given in Eq. (5).
with the boundary conditions \(T\left( {h/2} \right) =T_{0} +T_{t} \) and \(T\left( {-h/2} \right) =T_{0} +T_{b} \). Here, a stress-free state is assumed to exist at \(T_{0} =300(K)\). The solution of the above differential Eq. (5) is
In the case of power-law FG plate, the analytical solution of Eq. (6) can be obtained by means of polynomial series [30, 38, 48]
with
where \(k_{tb} =k_{t} -k_{b} \) with \(k_{t} \)and \(k_{b} \) are the thermal conductivity of the top and bottom surfaces of the plate, respectively.
2.2.4 Sinusoidal temperature rise
The sinusoidal temperature field used in this case is expressed as [30, 49]
2.3 Displacement fields and constitutive relations
Based on a 2D higher shear deformation theory, the displacement fields are expressed as follows
where \(u_{0} \), \(v_{0} \) and \(w_{0} \) are mid-plane displacements and \(\theta \) is the rotation of normal to the mid-plane of the plate. f(z) is a shear strain shape function defining the variation of the transverse shear strains and stresses across the thickness of the plate given in Eq. (11) [44].
The suppositions in Eq. (10) are based on the application of linear, small-strain elasticity theory, from which the general strain— displacement relations are expressed as
where
The used integrals in the above equations were resolved using the Navier’s method and written as
where coefficients\(A'\), \(B'k_{1} \), \(k_{2} \)are expressed as follows
\(\alpha \) and \(\beta \) are defined in Eq. (28).
The linear constitutive relations of FG plate are given below
in which (\(\sigma _{x} \), \(\sigma _{y} \), \(\tau _{xy} \), \(\tau _{yz}\), \(\tau _{xz} )\) and (\(\varepsilon _{x} \), \(\varepsilon _{y} \), \(\gamma _{xy} \), \(\gamma _{yz} \), \(\gamma _{xz} )\) are the stresses and the strains components, respectively. The \(Q_{ij} \) expressions in terms of engineering constants determined using the material properties given in Eq. (1) are as follows
2.4 Plate governing equations
In order to obtain the governing differential equations, Hamilton’s principle [50] is used.
where \(U_{M} \) and \(U_{T} \) are the strain energies due to mechanical and thermal effects, respectively. K is the kinetic energy.
The strain energies \(U_{M} \) and \(U_{T}\) of the plate can be expressed by [30, 51]
with
The kinetic energy of the plate is given by the following form:
By using Eqs. (10), (12), (16), substituting the expressions of Eqs. (19), (20), (22) into Eq. (18), integrating the displacement gradients by parts and setting the coefficients of \(\delta u_{0} \), \(\delta v_{0} \), \(\delta w_{0} \), \(\delta \theta \) to zero independently. The differential equations of motion for FG plate can be obtained as follows:
where \(d_{ij} \), \(d_{ijl} \) and \(d_{ijlm} \) are the following differential operators:
and stiffness components are given as:
The inertias are also defined as:
2.5 Analytical solutions
In order to solve Eq. (23), the Navier’s method is adopted to satisfy simply supported boundary conditions. So that, the analytical solutions are expressed based on double-Fourier series as presented below:
where \(U_{mn} \), \(V_{mn} \), \(W_{mn} \) and \(\theta _{mn} \) are arbitrary parameters to be determined, \(\omega \) is the Eigen-frequency associated with (m,n) the Eigen-mode. \(\alpha \) and \(\beta \) are stated as:
Substituting Eq. (27) into Eq. (23), the following eigenvalue equation is found:
in which:
3 Results and discussion
Various numerical results calculated using the present theory are presented in this section for temperature-dependent FG plates by considering two different types of FG plates such as \(\hbox {ZrO}_{\mathrm {2}}/\hbox {Ti}{-}6\hbox {Al}{-}4\hbox {V}\) and \(\hbox {Si}_{\mathrm {3}}\hbox {N}_{\mathrm {4}}/\hbox {SUS304}\) (see Table 1). The non-dimensional frequency parameter is taken as [22, 30].
where \(E_{b} \) and \(\rho _{b} \) are at \(T_{0} =300(K)\).

Variation of elastic modulus versus non-dimensional thickness (z/h) of FG plate in room temperature field and different values of power law index (p)

Variation of elastic modulus versus non-dimensional thickness (z/h) of FG plate in linear temperature field and different values of power law index (p)

Variation of elastic modulus versus non-dimensional thickness (z/h) of FG plate in nonlinear temperature field and different values of power law index (p)

Variation of elastic modulus versus non-dimensional thickness (z/h) of FG plate in sinusoidal temperature field and different values of power law index (p)

Variation of elastic modulus versus non-dimensional thickness (z/h) of FG plate in uniform, linear, nonlinear and sinusoidal temperature field and different values of power law index (p)
3.1 Material properties in thermal conditions
The variation of Young modulus across the thickness of FG plates subjected to a uniform (room temperature), linear, nonlinear and sinusoidal thermal conditions is presented in Figs. 2 to 6, respectively. Room temperature is defined as \(T_{0}=300(K)\) for all thermal conditions. The temperature rise in linear form is \(T_{b} =T_{t} =600(K),\) the nonlinear thermal conditions are \(T_{b} =0(K)\) and \(T_{t} =600(K)\) and the sinusoidal thermal conditions are \(T_{b} =300(K)\) and \(T_{t} =500(K)\).
Figure 2 and 3 present the variation of the elastic modulus through the thickness in uniform and sinusoidal thermal loads, respectively. It can be seen that the variations of Young’s modulus are similar in the two cases, but the curves move to smaller values with the linear temperature load. It is also clear that the increase of the power law index leads to the decrease of the Young’s modulus. For nonlinear and sinusoidal thermal loads, the values of Young’s modulus as shown in Figs. 4 and 5 increase close to the lower surface then decrease when \(p\leqslant 1\). On the other hand, they decrease then increase close to the upper surface when \(p>1\). In Fig. 6, a comparison study on Young’s modulus is undertaken for uniform, linear, nonlinear and sinusoidal thermal conditions. From these figures, it can be concluded that the behavior of Young’s modulus in uniform and linear thermal conditions is completely different from that in nonlinear and sinusoidal temperature cases, which means that the environmental conditions type affect considerably the variation of the elastic modulus.
3.2 Numerical results and validation
In order to prove and validate the efficiency of this theory, the non-dimensional natural frequencies are calculated for temperature-dependent and temperature-independent FG plates and they are compared with those obtained by Shahrjerdi et al. [30] using a second-order shear deformation theory (SSDT), Huang and Shen [22] based on a third-order shear deformation theory (TSDT) and Attia et al. [38] using four variables higher-order shear deformation theory (third plate theory (TPT), sinusoidal plate theory (SPT), hyperbolic plate theory (HPT), exponential plate theory (EPT) as presented in Table 2 and 3, respectively. Verifications are implemented by supposing the following conditions parameters: \(h=0.025 \text{ m }\), \(a=b=0.2 \text{ m }\).

First four Non-dimensional frequency parameters versus uniform temperature field for simply supported (\(\hbox {ZrO}_{\mathrm {2}}/\hbox {Ti}{-}6\hbox {Al}{-}4\hbox {V}\)) FGP when \((a/h = 10)\), \((a = 0.2)\), \((p = 1)\)

First four Non-dimensional frequency parameters versus linear temperature field for simply supported (\(\hbox {ZrO}_{\mathrm {2}}/\hbox {Ti}{-}6\hbox {Al}{-}4\hbox {V}\)) FGP when \((a/h = 10)\), \((a = 0.2)\), \((p = 1)\)

First four Non-dimensional frequency parameters versus nonlinear temperature field for simply supported (\(\hbox {ZrO}_{\mathrm {2}}/\hbox {Ti}-6\hbox {Al}-4\hbox {V}\)) FGP when \(a/h=10\), \(a=0.2\), \(p=1\)

First four Non-dimensional frequency parameters versus sinusoidal temperature field for simply supported (\(\hbox {ZrO}_{\mathrm {2}}/\hbox {Ti}{-}6\hbox {Al}{-}4\hbox {V}\)) FGP when \(a/h=10,\, a=0.2\), \(p=1\)
In Table 2, a FG plate made of \(\hbox {ZrO}_{\mathrm {2}}/\hbox {Ti}{-}6\hbox {Al}{-}4\hbox {V}\) is analyzed. In this example, Young’s modulus and thermal expansion coefficient of these materials are considered to be temperature-dependent [22, 30]. However, a same value of Poisson’s ratio \(\nu \) for both ceramic and metal is supposed to be \(\nu =\text{0.3. }\) From this Table, it can be seen that the comparison of non-dimensional natural frequencies is carried out for different values of power law index and thermal conditions loads (temperature-dependent and temperature-independent) FG plates (FGP). Therefore, the obtained results using the present theory are found to be in very good agreement with the results of Attia et al. [38] using various efficient higher-order shear deformation theories (TPT, SPT, HPT and EPT) Huang and Shen [22] and Shahrjerdi et al. [30].
In Table 3, comparisons are made using a FG \(\hbox {Si}_{\mathrm {3}}\hbox {N}_{\mathrm {4}}/\hbox {SUS304}\) plate. For these materials, the Poisson’s ratio is taken \(\nu =\text{0.28. }\) The computed dimensionless fundamental frequencies are compared with those given by Attia et al. [38], Shahrjerdi et al [30] and Huang and Shen [22] in Table 4 for different values of power law index p. As a result, this comparison shows that the present results are in very good agreement with existing results for all values of power law index p, either for the case of temperature-dependent and temperature-independent FG plates (FGP).
In the next example, a \(\hbox {ZrO}_{\mathrm {2}}/\hbox {Ti}{-}6\hbox {Al}{-}4\hbox {V}\) and \(\hbox {Si}_{\mathrm {3}}\hbox {N}_{\mathrm {4}}/\hbox {SUS304}\) plates are considered and the obtained results are compared to those of Huang and Shen [22] and Shahrjerdi et al. [30] as shown in Tables 4 and 5, respectively. It can be seen that the computed results are in good agreement with the previously published results [22, 30] and these for different considered shape mode.
In what follow, the non-dimensional natural frequencies are calculated using the expression as written below:
where \(I_{0} =\rho h\) and \(D_{0} ={Eh^{3}} / {12(1-\nu ^{2})}\)
The variation of the first-four dimensionless frequencies of simply supported square FG plate made of \(\hbox {ZrO}_{\mathrm {2}}/\hbox {Ti}{-}6\hbox {Al}{-}4\hbox {V}\) subjected to a uniform (room temperature), linear, nonlinear and sinusoidal thermal loads is shown in Figs. 7 to 10, respectively. The results show that natural frequencies reduce with the increase in temperature which is due to the decreasing of elastic modulus with the temperature raise. Also, the decrease of the frequencies in the higher modes is important compared to that in the smaller modes. At the same field of temperature, the difference between two consecutive higher modes is less than that of the case of two successive lower modes. It is obvious that the effect of the temperature distribution in the case of a uniform thermal field is more significant compared to the other thermal conditions, this can be explained by the fact that the decrease of the frequency under linear thermal loadings, nonlinear and sinusoidal is almost identical, while the decrease in frequency is important in the case of a uniform thermal loading.
3.3 Parametric study
In this section, the effects of different parameters such as the power law index, the mode numbers, plate geometry, and temperature fields on the frequency of FG plates are investigated here.
The non-dimensional frequencies values are listed in Tables 6 and 7 for \(\hbox {FG ZrO}_{\mathrm {2}}/\hbox {Ti}{-}6\hbox {Al}{-}4\hbox {V}\) and \(\hbox {Si}_{\mathrm {3}}\hbox {N}_{\mathrm {4}}/\hbox {SUS304}\) plates, respectively. The non-dimensional natural frequency parameter is defined as \({{\overline{\omega }}} =\omega (a^{2}/h)\left[ {\rho _{b} (1-\nu ^{2})/E_{b} } \right] ^{1/2}\), where \(E_{b} \) and \(\rho _{b} \) are at \(T_{0} =300(K).\) The effect of power law index p on the frequencies can be seen by considering the same value of thermal load and shape mode. The results for FG plates are found to be between those for pure material plates, since Young’s modulus increases from pure metal to pure ceramic. The frequencies decrease by increasing the temperature difference between top and bottom surfaces for the same value of power law index and shape mode that represent the effects of thermal loads. The comparison between temperature-dependent and independent FG plates in Tables 6 and 7 reveals the smaller frequencies in temperature-dependent FG plates, which proves the accuracy and effectiveness of temperature-dependent material properties.
In Figs. 11, 12, 13 and 14, the effect of side-to-side ratio on the variation of dimensionless frequencies versus the variation of different temperature fields of a simply supported \(\hbox {FG ZrO} _{\mathrm {2}}/\hbox {Ti}{-}6\hbox {Al}{-}4\hbox {V}\) plate is examined. From these figures, it is observed that the frequencies increase with the increase of the ratio b/a when \(\hbox {b/a} \leqslant 2\). It is also noted that the frequencies decrease as temperature change increases in all types of temperature fields; this is due to the decrease of the Young’s modulus with the increasing of temperature. It is also noted that the decrease of the frequencies in the case where \(\hbox {b/a }= 2\) is important compared to the other ratios b/a when the side-to-thickness ratio \(\hbox {a/h}=10\). The uniform temperature fields affect the frequencies more significantly than the linear, nonlinear and sinusoidal temperature fields.
4 Conclusions
A two-dimensional higher-order shear deformation theory has been presented for dynamic analysis of FG plates subjected to uniform, linear, nonlinear and sinusoidal temperature fields. The displacement fields of the presented theory are chosen based on a parabolic distribution of transverse shear strains through the thickness and satisfy the zero traction boundary conditions. The FG plates are assumed to be simply supported with temperature-dependent and independent material properties according to a power law variation. Numerical results are presented for temperature-dependent and temperature-independent FG plate and compared with available results in the literature to check the accuracy of the proposed theory. It can be found that the present theory is efficient and simple in investigating the free vibration response of FG plates exposed to thermal loading. Thus, this work can be used as a reference to assess the validity and establish the accuracy of various approximate theories and to solve the free vibration problems of FG plates under different boundary and environmental conditions.

Non-dimensional frequency parameters versus uniform temperature field for different values of side-to-side ratio \(\left( {b/a} \right) \) and simply supported (\(\hbox {ZrO}_{\mathrm {2}}/\hbox {Ti}{-}6\hbox {Al}{-}4\hbox {V}\)) FGP when \(a/h=10\) and \(a=0.2\), \(p=2\)

Non-dimensional frequency parameters versus linear temperature field for different values of side-to-side ratio \(\left( {b/a} \right) \) and simply supported (\(\hbox {ZrO}_{\mathrm {2}}/\hbox {Ti}{-}6\hbox {Al}{-}4\hbox {V}\)) FGP when \(a/h=10\) and \(a=0.2\), \(p=2\)

Non-dimensional frequency parameters versus nonlinear temperature field for different values of side-to-side ratio \(\left( {b/a} \right) \) and simply supported (\(\hbox {ZrO}_{\mathrm {2}}/\hbox {Ti}{-}6\hbox {Al}{-}4\hbox {V}\)) FGP when \(a/h=10\) and \(a=0.2\), \(p=2\)

Non-dimensional frequency parameters versus sinusoidal temperature field for different values of side-to-side ratio \(\left( {b/a} \right) \) and simply supported (\(\hbox {ZrO}_{\mathrm {2}}/\hbox {Ti}{-}6\hbox {Al}{-}4\hbox {V}\)) FGP when \(a/h=10\) and \(a=0.2\), \(p=2\)
References
Şimşek, M.: Buckling of Timoshenko beams composed of two-dimensional functionally graded material (2D-FGM) having different boundary conditions. Compos. Struct. 149, 304–314 (2016). https://doi.org/10.1016/j.compstruct.2016.04.034
Ebrahimi, M.J., Najafizadeh, M.M.: Free vibration analysis of two-dimensional functionally graded cylindrical shells. Appl. Math. Model. 38, 308–324 (2014). https://doi.org/10.1016/j.apm.2013.06.015
Lei, Z.X., Zhang, L.W., Liew, K.M.: Buckling analysis of CNT reinforced functionally graded laminated composite plates. Compos. Struct. 152, 62–73 (2016). https://doi.org/10.1016/j.compstruct.2016.05.047
Mehditabar, A., Rahimi, G.H., Vahdat, S.E.: Integrity assessment of functionally graded pipe produced by centrifugal casting subjected to internal pressure: experimental investigation. Arch. Appl. Mech. 90, 1723–1736 (2020). https://doi.org/10.1007/s00419-020-01692-5
Belkhodja, Y., Ouinas, D., Zaoui, F.Z., Fekirini, H.: A higher order exponential-trigonometric shear deformation theory for bending, vibration, and buckling analysis of functionally graded material (FGM) plates: Part I. Advanced Compos Letters 28, 1–19 (2019). https://doi.org/10.1177/0963693519875739
Mantari, J.L., Soares, C.G.: A quasi-3D tangential shear deformation theory with four unknowns for functionally graded plates. Acta Mech. 226, 625–642 (2015). https://doi.org/10.1007/s00707-014-1192-3
Sayyad, A.S., Ghugal, Y.M.: A unified shear deformation theory for the bending of isotropic, functionally graded, laminated and sandwich beams and plates. Int. J. Appl. Mech. 9, 1750007 (2017)
Li, S., Ma, H.: Analysis of free vibration of functionally graded material micro-plates with thermoelastic damping. Arch. Appl. Mech. 90, 1285–1304 (2020). https://doi.org/10.1007/s00419-020-01664-9
Li, Q., Iu, V., Kou, K.: Three-dimensional vibration analysis of functionally graded material plates in thermal environment. J. Sound Vibr. 324(3–5), 733–750 (2009). https://doi.org/10.1016/j.jsv.2009.02.036
Zaoui, F.Z., Tounsi, A., Ouinas, D.: Free vibration of functionally graded plates resting on elastic foundations based on quasi-3D hybrid-type higher order shear deformation theory. Smart Struct. Syst. Int. J. 20(4), 509–524 (2017). https://doi.org/10.12989/sss.2017.20.4.509
Zenkour, A.M., Radwan, A.F.: Hygrothermo-mechanical buckling of FGM plates resting on elastic foundations using a quasi-3D model. Int. J. Comput. Methods Eng. Sci. Mech. 20(2), 85–98 (2019). https://doi.org/10.1080/15502287.2019.1568618
Hieu, P.T., Van Tung, H.: Thermal and thermomechanical buckling of shear deformable FG-CNTRC cylindrical shells and toroidal shell segments with tangentially restrained edges. Arch. Appl. Mech. 90, 1529–1546 (2020). https://doi.org/10.1007/s00419-020-01682-7
Woodward, B., Kashtalyan, M.: Three-dimensional elasticity analysis of sandwich panels with functionally graded transversely isotropic core. Arch. Appl. Mech. 89, 2463–2484 (2019). https://doi.org/10.1007/s00419-019-01589-y
Boroujerdy, M.S., Eslami, M.R.: Nonlinear axisymmetric thermomechanical response of piezo-FGM shallow spherical shells. Arch. Appl. Mech. 83, 1681–1693 (2013). https://doi.org/10.1007/s00419-013-0769-y
Guerroudj, H.Z., Yeghnem, R., Kaci, A., Zaoui, F.Z., Benyoucef, S., Tounsi, A.: Eigenfrequencies of advanced composite plates using an efficient hybrid quasi-3D shear deformation theory. Smart Struct. Syst. Int. J. 22(1), 121–132 (2018). https://doi.org/10.12989/sss.2018.22.1.121
Simsek, M., Cansiz, S.: Dynamics of elastically connected double-functionally graded beam systems with different boundary conditions under action of a moving harmonic load. Compos. Struct. 94, 2861–2878 (2012). https://doi.org/10.1016/j.compstruct.2012.03.016
Amirani, M.C., Khalili, S.M.R., Nemati, N.: Free vibration analysis of sandwich beam with FG core using the element free Galerkin method. Compos. Struct. 90, 373–379 (2009). https://doi.org/10.1016/j.compstruct.2009.03.023
Mahmoudi A, Benyoucef S, Tounsi A, Benachour A, Adda Bedia EA (2018) On the effect of the micromechanical models on the free vibration of rectangular FGM plate resting on elastic foundation.Earthquakes Struct Int J 14(2):117-128.https://doi.org/10.12989/eas.2018.14.2.117
Duc, N.D., Tran, Q.Q., Nguyen, D.K.: New approach to investigate nonlinear dynamic response and vibration of imperfect functionally graded carbon nanotube reinforced composite double curved shallow shells subjected to blast load and temperature. Aerosp. Sci. Technol. 71, 360–372 (2017). https://doi.org/10.1016/j.ast.2017.09.031
Shen, H.S.: Nonlinear bending response of functionally graded plates subjected to transverse loads and in thermal environments. Int. J. Mech. Sci. 44(3), 561–584 (2002). https://doi.org/10.1016/S0020-7403(01)00103-500103-5
Yang, J., Shen, H.S.: Vibration characteristics and transient response of shear-deformable functionally graded plates in thermal environments. J. Sound Vibr. 255(3), 579–602 (2002). https://doi.org/10.1006/jsvi.2001.4161
Huang, X., Shen, H.: Nonlinear vibration and dynamic response of functionally graded plates in thermal environments. Int. J. Solids Struct. 41(9–10), 2403–2427 (2004). https://doi.org/10.1016/j.ijsolstr.2003.11.012
Kim, Y.: Temperature dependent vibration analysis of functionally graded rectangular plates. J. Sound Vib. 28(3–5), 531–549 (2005). https://doi.org/10.1016/j.jsv.2004.06.043
Chen, C., Chen, T., Chien, R.: Nonlinear vibration of initially stressed functionally graded plates. Thin-Walled Struct. 44(8), 844–851 (2006). https://doi.org/10.1016/j.tws.2006.08.007
Zenkour, A.M., Alghamdi, N.A.: Thermoelastic bending analysis of functionally graded sandwich plates. J. Mater. Sci. 43, 2574–89 (2008). https://doi.org/10.1007/s10853-008-2476-6
Li, S.R., Su, H.D., Cheng, C.J.: Free vibration of functionally graded material beams with surface-bonded piezoelectric layers in thermal environment. Appl. Math. Mech. 30(8), 969–982 (2009). https://doi.org/10.1007/s10483-009-0803-7
Shariyat, M.: A generalized high-order global-local plate theory for nonlinear bending and buckling analyses of imperfect sandwich plates subjected to thermo-mechanical loads. Compos. Struct. 92, 130–143 (2010). https://doi.org/10.1016/j.compstruct.2009.07.007
Shariyat, M.: A generalized global-local high-order theory for bending and vibration analyses of sandwich plates subjected to thermo-mechanical loads. Int. J. Mech. Sci. 52, 495–514 (2010). https://doi.org/10.1016/j.ijmecsci.2009.11.010
Mahi, A., Adda Bedia, E.A., Tounsi, A., Mechab, I.: An analytical method for temperature dependent free vibration analysis of functionally graded beams with general boundary conditions. Compos. Struct. 92, 1877–1887 (2010). https://doi.org/10.1016/j.compstruct.2010.01.010
Shahrjerdi, A., Mustapha, F., Bayat, M., Majid, D.L.A.: Free vibration analysis of solar functionally graded plates with temperature-dependent material properties using second order shear deformation theory. J. Mech. Sci. Technol. 25(9), 2195–2209 (2011). https://doi.org/10.1007/s12206-011-0610-x
Kiani, Y., Eslami, M.R.: Thermal buckling and post-buckling response of imperfect temperature-dependent sandwich FGM plates resting on elastic foundation. Arch. Appl. Mech. 82(7), 891–905 (2012). https://doi.org/10.1007/s00419-011-0599-8
Malekzadeh, P., Monajjemzadeh, S.M.: Dynamic response of functionally graded plates in thermal environment under moving load. J. Compos. B 45, 1521–1533 (2013). https://doi.org/10.1016/j.compositesb.2012.09.022
Zhang, D.: Nonlinear bending analysis of FGM rectangular plates with various supported boundaries resting on two-parameter elastic foundations. Arch. Appl. Mech. 84, 1–20 (2014). https://doi.org/10.1007/s00419-013-0775-0
Nejati, M., Fard, K.M., Eslampanah, A.: Effects of fiber orientation and temperature on natural frequencies of a functionally graded beam reinforced with fiber. J. Mech. Sci. Technol. 29, 3363–3371 (2015). https://doi.org/10.1007/s12206-015-0734-5
Fazzolari, F.A.: Natural frequencies and critical temperatures of functionally graded sandwich plates subjected to uniform and non-uniform temperature distributions. Compos. Struct. 121, 197–210 (2015). https://doi.org/10.1016/j.compstruct.2014.10.039
Kar, V.R., Panda, S.K.: Free vibration responses of temperature dependent functionally graded curved panels under thermal environment. Latin Am. J. Solids Struct. 12(11), 2006–2024 (2015). https://doi.org/10.1590/1679-78251691
Attia, A., Tounsi, A., Adda Bedia, E.A., Mahmoud, S.R.: Free vibration analysis of functionally graded plates with temperature-dependent properties using various four variable refined plate theories. Steel Compos. Struct. 18(1), 187–212 (2015). https://doi.org/10.12989/scs.2015.18.1.187
Ibrahimi, F., Barati, M.R.: Temperature distribution effects on buckling behavior of smart heterogeneous nanosize plates based on nonlocal four-variable refined plate theory. Int. J. Smart Nano Mater. 7(3), 119–143 (2016). https://doi.org/10.1080/19475411.2016.1223203
Wang, Y.Q., Zu, J.W.: Vibration behaviors of functionally graded rectangular plates with porosities and moving in thermal environment. Aerosp. Sci. Technol. 69, 550–562 (2017). https://doi.org/10.1016/j.ast.2017.07.023
Taleb, O., Houari, M.S.A., Bessaim, A., Tounsi, A., Mahmoud, S.R.: A new plate model for vibration response of advanced composite plates in thermal environment. Struct. Eng. Mech. Int. J. 67(4), 369–383 (2018). https://doi.org/10.12989/sem.2018.67.4.369
Shahsavari, D., Shahsavari, M., Li, L., Karami, B.: A novel quasi-3D hyperbolic theory for free vibration of FG plates with porosities resting on Winkler/Pasternak/Kerr foundation. Aerosp. Sci. Technol. 72, 134–149 (2018). https://doi.org/10.1016/j.ast.2017.11.004
Thang, P.T., Nguyen-Thoi, T., Lee, D., Kang, J., Lee, J.: Elastic buckling and free vibration analyses of porous-cellular plates with uniform and non-uniform porosity distributions. Aerosp. Sci. Technol. 79, 278–287 (2018). https://doi.org/10.1016/j.ast.2018.06.010
Tu, T.M., Quoc, T.H., Van Long, N.: Vibration analysis of functionally graded plates using the eight-unknown higher order shear deformation theory in thermal environments. Aerosp. Sci. Technol. 84, 698–711 (2019). https://doi.org/10.1016/j.ast.2018.11.010
Zaoui, F.Z., Ouinas, D., Tounsi, A.: New 2D and quasi-3D shear deformation theories for free vibration of functionally graded plates on elastic foundations. Compos. Part B Eng. 159, 231–247 (2019). https://doi.org/10.1016/j.compositesb.2018.09.051
Azadi, M.: Free and forced vibration analysis of FG beam considering temperature dependency of material properties. J. Mech. Sci. Technol. 25(1), 69–80 (2011). https://doi.org/10.1007/s12206-010-1015-y
Touloukian, Y.S.: Thermophysical Properties of High Temperature Solid Materials. MacMillan, New York (1967)
Reddy, J.N., Chin, C.D.: Thermo-mechanical analysis of functionally graded cylinders and plates. J. Therm. Stress. 21, 593–626 (1998). https://doi.org/10.1080/01495739808956165
Javaheri, R., Eslami, M.: Thermal buckling of functionally graded plates based on higher order theory. J. Therm. Stress. 25(7), 603–625 (2002). https://doi.org/10.1080/01495730290074333
Mokhtar, B., Abedlouahed, T., Adda Bedia, E.A., Abdelkader, M.: Buckling analysis of functionally graded plates with simply supported edges. Leonardo J. Sci. 8, 21–32 (2009)
Esmaeilzadeh, M., Kadkhodayan, M.: Dynamic analysis of stiffened bi-directional functionally graded plates with porosities under a moving load by dynamic relaxation method with kinetic damping. Aerosp. Sci. Technol. 93, 105333 (2019). https://doi.org/10.1016/j.ast.2019.105333
Li, Q., Iu, V., Kou, K.: Three-dimensional vibration analysis of functionally graded material plates in thermal environment. J. Sound Vib. 324(3–5), 733–750 (2009). https://doi.org/10.1016/j.jsv.2009.02.036
Acknowledgements
The research reported herein was funded by the Deanship of Scientific Research at the University of Hail, Saudi Arabia, through the Project Number RG- 191241. The authors would like to express their deepest gratitude to the Deanship of Scientific Research and to the College of Engineering at the University of Hail for providing necessary support to conducting this research.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Zaoui, F.Z., Ouinas, D., Tounsi, A. et al. Fundamental frequency analysis of functionally graded plates with temperature-dependent properties based on improved exponential-trigonometric two-dimensional higher shear deformation theory. Arch Appl Mech 91, 859–881 (2021). https://doi.org/10.1007/s00419-020-01793-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-020-01793-1