
Abstract
Introducing the fractional \(\Lambda \)-derivative, with the corresponding \(\Lambda \)-fractional spaces, the fractional beam bending problem is presented. In fact, non-local derivatives govern the beam bending problem that accounts for the interaction of microcracks or materials non-homogeneities, such as composite materials or materials with fractal geometries. The proposed theory is implemented to the fractional bending deformation of a simply supported beam and a cantilever beam under continuously distributed loading.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Fractional derivative models account for long-range (non-local) dependence of phenomena and result in a better description of their behavior. Various material models based upon fractional time derivatives have been presented, for describing their viscoelastic interaction, Refs. [2, 3]. Lazopoulos [4] has proposed a model for lifting Noll’s axiom of local action, Truesdell [5], denoting that the stress at a point depends only upon the (local) strain at that point. Eringen [18] in his excellent treatment concerning the non-local theories of continua states in the introduction of his treatment “Non-local continuum field theories are concerned with the physics of material bodies whose behavior of a material point is influenced by the state of all points of the body. The non-local theory generalizes the classical field theory in two respects (i) the energy balance law is considered valid globally (for the entire body) and (ii) the state of the body at a material point is described by the response functionals.” Further, the works of Klinek [19], Drapaca and Sivaloganathan [20] and Sumelka [21] should be mentioned, since they have highly contributed in the application of fractional analysis in Mechanics.
Fractional calculus, originated by Leibniz [6], Liouville [7] and Riemann [8], has been recently applied to modern advances in physics, engineering, etc., just to introduce non-local derivatives. Carpinteri et al. [9] have also proposed a fractional approach to non-local mechanics. Applications in various physical areas may be also found in various books, Refs. [10,11,12,13]. Let us point out that fractional derivatives abolish the local character of the conventional derivatives. Nevertheless, the most popular ones do not succeed to behave like derivatives, since they are not able to satisfy the demands of differential topology, for being derivatives. However, all the well-known fractional derivatives have mainly an operative character, instead of a derivative one. All the known fractional derivatives do not access the properties of a derivative demanded by differential topology, just to correspond to fractional differential. In fact, there are three prerequisites for defining a derivative corresponding to a differential, Chillingworth [14].
- 1.
Linearity \(D\left( {af\left( x \right) +bg\left( x \right) } \right) =aDf\left( x \right) +bDg\left( x \right) \)
- 2.
Leibniz rule \(D\left( {f\left( x \right) \cdot g \left( x \right) } \right) =Df\left( x \right) \cdot g\left( x \right) +f\left( x \right) \cdot Dg\left( x \right) \)
- 3.
Chain rule \(D\left( {g\left( f \right) } \right) \left( x \right) =Dg(f\left( x \right) \cdot Df\left( x \right) \)
Those conditions are necessary for defining a differential corresponding to the derivative. Since no differential geometry, mechanics and physics may mathematically be established without mathematically defined derivative, the use of fractional derivatives in mathematics and physics is questionable.
Hence, their use was not mathematically established, but it has an ad hoc character. Lazopoulos [15], trying to fill that gap, proposed the fractional L-derivative. Nevertheless, that effort was not successful, since again the conditions demanded by differential topology were not satisfied. Lately, Lazopoulos [1] proposed the fractional \(\Lambda \)-derivative that is a modification of the fractional L-derivative, along with the fractional \(\Lambda \)-space where the fractional \(\Lambda \)-derivative behaves according to conventional derivative rules.
Let us point out that the clear picture of the fractional tangent space on a manifold is missing. References [16, 17] are concerned with fractional geometry in manifolds, with extensive information concerning fractional differential geometry topics. However, a clear picture of the fractional differential geometry is missing, since the picture of the fractional tangent space on a manifold has not yet been clarified.
In the present work, outlining the procedure for the definition of the fractional curvature of a curve, the fractional curvature of plane curves is defined in the \(\Lambda \)-fractional space. In addition for small beam deflections, the fractional curvature is approximated. Introducing that curvature approximation to Bernoulli’s bending principle, fractional bending theory of beams is established. Universal equation of the fractional deflection beam curve is also presented. Implementation of the proposed theory to the fractional simply supported beam under continuously distributed loading is presented. The fractional elastic curve of a simply supported and a cantilever beam under uniformly distributed load, for various fractional dimensions, is presented. The deformations of the fractional beam are larger for smaller fractional dimensions. That is correct, since smaller fractional dimension corresponds to larger microcracks or larger inhomogeneities.
2 The \(\Lambda \)-fractional derivative
A very brief outline of fractional calculus will be presented in the present chapter, while the interested reader is referred to Refs. [10,11,12] for information.
In fact, the left and right fractional integrals, for a real fractional dimension \(0<\gamma \le 1\), are defined by,
\(\gamma \) is the order of fractional integrals where \(\varGamma (x)=(x-1)!\) with \(\varGamma (\gamma )\) Euler’s Gamma function. Further, the left Riemann–Liouville’s fractional derivative (RL) is defined by:
whereas the right Riemann–Liouville’s fractional derivative (RL) derivative is defined by:
Let us point out that for the left fractional integrals and derivative
Similar relation is valid for the right Riemann–Liouville derivative and right fractional integral.
The \(\Lambda \)-fractional derivative (\(\Lambda \)-FD) has been defined as
Recalling the definition of the Riemann Liouville’s fractional derivative, Eq. (3), the \(\Lambda \)-FD is expressed by,
Considering as
the \(\Lambda \)-FD appears to behave as a conventional derivative in the fractional \(\Lambda \)-space (X, F(X)) with local properties. In fact, the fractional differential geometry may be constructed as a conventional differential geometry in the \(\Lambda \)-fractional space, (X, F(X)).
Just to clarify the ideas, let us work as an example on the function,
Without restricting the theory, but for simplification of the algebra, the left terminal is considered a = 0. Then, the \(\Lambda \)-fractional plane (X, F(X)) is defined by
Further considering from Eq. (10),
Equation (12) yields
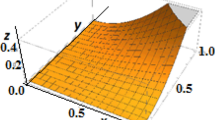
Therefore, the curve in the original plane (x, f(x)) shown in Fig. 1 corresponds to the fractional plane (space) shown in Fig. 2, for \(\gamma \) = 0.6. Further, the derivative

Original plane (\(x, f(x)=x^{2}\))

Curve in the \(\Lambda \)-fractional space (X, F(X)) for \(\gamma \) = 0.6
For \(X_{0}=0.6\) and \(\gamma =0.6\), the derivative in the fractional plane is equal to \(D(F(X_{0}))=1.1580\) (Fig. 3). Since the tangent space Y(X) of the curve at a point \(X_{0}\) is defined by the line,

Curve with its tangent space in the \(\Lambda \)- fractional plane
In the original plane (x, f(x)), the corresponding tangent space is defined by the curve that will be built as follows.
Recalling Eq. (12), the \(x_{0}\) = 0.81 corresponding to \(X_{0}=0.60\) is defined. Then, substituting in the derivative \(\frac{\text {d}F\left( X \right) }{\text {d}X}\) in the fractional plane the X as a function of x, the \({ }_0^\varLambda D_x^\gamma f\left( x \right) \) is defined. Therefore, the corresponding function in the real space (x, f(x)) is defined as \({ }_0^{RL} D_x^{1-\gamma } \left( {{ }_0^\varLambda D_x^\gamma f\left( x \right) {~}} \right) .\) Indeed,
In the present case for the function \(f(x)=x^{2}\), and \(\gamma =0.6\),
Thus, the fractional tangent space g(x) in the original space (x, f(x)) is defined as
In the present case at \(X_{0}=0.6\) for \(\gamma =0.6\), \(x_{0}=0.81\) the tangent space is defined by

Curve f(x) with its fractional tangent space g(x) in the original plane for \(\gamma =0.6\) at \(x=0.81\)
Therefore, the left \(\Lambda \)-fractional space of \(F({ }_a X_x^\gamma )\) with respect to \({ }_a X_x^\gamma \) is formulated. However, there exists the right \({ }_x \varLambda _b^\gamma \) space with the right \(F({ }_x X_b^\gamma )\), formulated by similar way, with respect to the \({ }_x X_b^\gamma \) variable (Fig. 4). Since geometry exists only on the \(\Lambda \)-fractional spaces and differentials exist only on those spaces, the analysis is developed for the left and the right \(\Lambda \)-fractional spaces and the results are transferred to the initial space through Eq. (5). The final responses in the original space are defined by the mean value of the results derived in the original space from the \(\Lambda \)-spaces. The procedure will be explained in the discussion of the fractional bending of a simply supported beam under uniformly distributed loading.
3 Bending of a fractional simply supported Beam under uniform loading
Since the problem is symmetric and linear with respect to strain, the problem may be considered separately in the left and right bending problems. Then, the final result comes out as the mean value of the left and right solutions. Of course in general bending problems, the left and right fractional deformations should be considered together.
Let us point out that for the moment, we are going to discuss the solution in the left fractional space. So the \(\Lambda \)-fractional space has the meaning of the left \(\Lambda \)-fractional space and the variable X and the function Y(X) have the meaning of the corresponding left variable and function. Assuming the beam in the initial space (x, y(x)), the beam deflection y(x) is defined, using the \(\Lambda \)-fractional derivative of order \(\gamma \). At first, the simply supported beam is transferred from the initial space (x, y) to the \(\Lambda \)-fractional space \({(X,Y(\mathrm{X}))}\). Therefore, the \(\Lambda \)-fractional space is defined by the variable:
or, reversely:
Accordingly, for the axis Y(X)
and the Y(X) is defined if in Eq. (22), and the x variable is substituted using Eq. (15). Moreover, the derivative in the \(\Lambda \)-fractional space (X, Y(X)) is defined as,
Let us point out that the derivative in that space is local and processes all the properties corresponding to a differential, demanded by differential topology. That allows us to create differential geometry that is important for discussing any mechanics or generally physics problem in an accurate mathematical way.
Consider a simply supported beam with stiffness EI, length L, loaded by a uniformly distributed loading q. Then, the corresponding stiffness in the \(\Lambda \)-space \(\hbox {EI}^{\Lambda }\) is defined by, see Eq. (8b),
The corresponding bending moment in the \(\Lambda \)-space is defined by
The well-known beam elastic curve, in the \(\Lambda \)-space is defined by,
Taking into consideration Eq. (26), the curvature,
Hence, the governing equation, Eq. (26), becomes
Further,
In addition,
Hence, the governing equation for the elastic curve of the beam is defined by,
The solution to Eq. (31) of the elastic curve, in the \(\Lambda \)-space with variable x of the initial space, is expressed by,
Since \(Y(X)=~{ }_0 {I}_x^{1-\gamma } y\left( x \right) \), Eq. (15) yields the elastic curve y(x) due to bending,
With the help of the Mathematica computerized algebra pack, the solution \(y^{l}(x)\) of the elastic curve in the left fractional \(\Lambda \)-space is defined by,
The procedure, described up to this point, deals only the left \(\Lambda \)-fractional space. However, similar procedure has to be followed for the right \(\Lambda \)-fractional space, formulated by the right fractional integrals, Eq. (2) and derivatives, Eq. (4). Following similar procedure, the elastic curve described in the right \(\Lambda \)-fractional space is symmetric to the one described by Eq. (34). Therefore, following the procedure in the right \(\Lambda \)- fractional space,
The final equation of the elastic curve is defined as the mean value of the left and right Eqs. (34, 35).
The equation of the elastic curve, Eq. (36), has to satisfy the boundary conditions,
It is evident that \(C_{2}=0\), since the nonzero \(C_{2}\) yields infinite values of the elastic curve at the supports. Furthermore, the zero boundary conditions, Eq. (37), define the value of \(C_{1}\) for each fractional dimension \(\gamma \).
In Fig. 5, the elastic curve of the simply supported beam under the loading \(\frac{q}{EI}=1\) for various fractional dimensions is shown.

Elastic curve of a fractional simply supported beam with various fractional dimensions
As it is expected, the arrow of the elastic line is longer with smaller fractional dimension. That is evident, because the cracks and the various inhomogeneities are bigger with decreasing fractional dimensions. So the beams are less stiff.
4 Bending of a fractional cantilever beam under uniform loading
The present chapter has been added just to show how a fractional problem may be worked out with the simultaneous action of the left and right fractional derivative. Indeed, let us consider a cantilever beam under the action of uniform load q and free length \(L=1\), see Fig. 6.

Cantilever beam
Considering the contribution of the right side fractional derivative, the \(\Lambda \)-fractional space may be defined with,
Further, in that case Eq. 8 becomes,
and the \(\Lambda \)-fractional derivative, Eq. (6), is defined in the present case by,
Consider a simply supported beam with stiffness EI, length L, loaded by a uniformly distributed loading q. Then, the corresponding stiffness in the \(\Lambda \)-space EI\(^{\Lambda }\) is defined by, see Eq. (8b),
The corresponding bending moment in the \(\Lambda \)-space, see Eq. (25), in the present case is defined by
The well-known beam elastic curve, in the \(\Lambda \)-space, is defined by,
Taking into consideration Eq. (43), the curvature,
Hence, the governing equation, Eq. (43), becomes
Further,
In addition,
Hence, the governing equation for the elastic curve of the beam is defined by,
with the b.cs

Elastic curve of the cantilever beam for various \(\gamma \) dimensions
Since \(Y(X)= {I}^{1-\gamma } y\left( x \right) \), transferring the solution to the initial plane (y, x), Eq. (15) yields the elastic curve y(x) due to bending,
With the help of the Mathematica Numerical Solution of the Differential Equations pack, the elastic curve of the cantilever beam has been defined for a = 1 and various fractional dimensions, \(\gamma \). Figure 7 shows the elastic curve of a beam with a = 1 for various fractional dimensions \(\gamma \).
It is pointed out that the elastic curve is stiffer in the fixed end of the cantilever beam for smaller fractional dimension.
5 Conclusion–further research
The beam bending problem of a fractional beam has been presented. The various \(\Lambda \)- fractional spaces with the corresponding \(\Lambda \)-fractional derivatives have been presented since they are the unique fractional derivatives sufficient to formulate differentials and subsequently fractional geometry. The bending problem of a simply supported beam under uniformly distributed loading has been presented. The fractional elastic curve, depending upon the fractional dimension \(\gamma \), has been described. Moreover, the fractional bending of a cantilever beam has been discussed, just to show how the proposed method may be applied to a non-symmetric fractional bending problem.
Further research is directed to formulation of fractional geometry, fractional continuum mechanics and generally fractional physics.
References
Lazopoulos, K., Lazopoulos, A.: (2019) On the Mathematical Formulation of Fractional Derivatives, Progress in Fractional Differentiation and Applications, accepted
Atanackovic, T.M., Stankovic, B.: Generalized wave equation in nonlocal elasticity. Acta Mech. 208(1–2), 1–10 (2009)
Beyer, H., Kempfle, S.: Definition of physically consistent damping laws with fractional derivatives. ZAMM 75(8), 623–635 (1995)
Lazopoulos, K.A.: Nonlocal continuum mechanics and fractional calculus. Mech. Res. Commun. 33, 753–757 (2006)
Truesdell, C.: A First Course in Rational Continuum Mechanics, vol. 1. Academic Press, New York (1977)
Leibnitz, G.W.: Letter to G. A. L’Hospital, Leibnitzen Mathematishe Schriften 2, 301–302 (1849)
Liouville, J.: Sur le calcul des differentielles a indices quelconques. J. Ec. Polytech. 13, 71–162 (1832)
Riemann, B.: (1876) Versuch einer allgemeinen Auffassung der Integration and Differentiation. In: Gesammelte Werke, 62
Carpinteri, A., Cornetti, P., Sapora, A.: A fractional calculus approach to non-local elasticity. Eur. Phys. J. Spec. Top. 193, 193–204 (2011)
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Applications of Fractional Differential Equations. Elsevier, Amsterdam (2006)
Samko, S.G., Kilbas, A.A., Marichev, O.I.: Fractional Integrals and Derivatives: Theory and Applications. Gordon and Breach, Amsterdam (1993)
Podlubny, I.: Fractional Differential Equations (An Introduction to Fractional Derivatives, Fractional Differential Equations, Some Methods of Their Solution and Some of Their Applications). Academic Press, San Diego-Boston-New York-London-Tokyo-Toronto (1999)
Oldham, K.B., Spanier, J.: The Fractional Calculus. Academic Press, New York and London (1974)
Chillingworth, D.R.J.: Differential Topology with a View to Applications. Pitman, London, San Francisco (1976)
Lazopoulos, K.A., Lazopoulos, A.K.: Fractional vector calculus and fractional continuum mechanics. Prog. Fract. Differ. Appl. 2(1), 67–86 (2016)
Calcani, G.: Geometry of fractional spaces. Adv. Theor. Math. Phys. 16, 549–644 (2012)
Jumarie, Guy: Riemann–Christoffel tensor in differential geometry of fractional order. Appl. Fract. Space Time Fractals 21(1), 1350004 (2013)
Eringen, A.C.: Nonlocal Continuum Field Theories. Springer, New York (2002)
Klimek, M.: Fractional sequential mechanics-models with symmetric fractional derivative. Czech J. Phys. 51(12), 1346–1354 (2001)
Drapaca, C.S., Sivaloganathan, S.: A fractional model of continuum mechanics. J. Elast. 107, 1007–123 (2002)
Sumelka, W.: Thermoelasticity in the framework of the fractional continuum mechanics. J. Therm. Stresses 37(6), 678–706 (2014)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix
Although the conditions required from differential topology are evident, they are also proved in “Appendix”.
Topological prerequisites
The three topological perquisites apply for the functions F(X), G(X) and variable X.
- (a):
Linearity \(D\left( {aF\left( X \right) +bG\left( X \right) } \right) =aDF\left( X \right) +bDG\left( X \right) \)
$$\begin{aligned}&D\left( { aF\left( X \right) +bG\left( X \right) } \right) \\&\quad =\frac{a24\left( {5-\gamma } \right) \left( {2-3\gamma +\gamma ^{2}} \right) \varGamma \left( {1-\gamma } \right) \left( {{X}\left( {2-3\gamma +\gamma ^{2}} \right) \varGamma \left( {1-\gamma } \right) } \right) ^{-1+\frac{1}{2-\gamma }}\left( {{X}\left( {2-3\gamma +\gamma ^{2}} \right) \varGamma \left( {1-\gamma } \right) ^{\frac{1}{2-\gamma }}} \right) ^{4-\gamma }}{\left( {2-\gamma } \right) \left( {\varGamma \left( {6-\gamma } \right) } \right) }\\&\qquad -\,\frac{\beta 2\left( {3-\gamma } \right) \left( {2-3\gamma +\gamma ^{2}} \right) \left( {{X}\left( {2-3\gamma +\gamma ^{2}} \right) \varGamma \left( {1-\gamma } \right) } \right) ^{-1+\frac{1}{2-\gamma }}\left( {{X}\left( {2-3\gamma +\gamma ^{2}} \right) \varGamma \left( {1-\gamma } \right) ^{\frac{1}{2-\gamma }}} \right) ^{2-\gamma }}{\left( {2-\gamma } \right) \left( {\varGamma \left( {6-\gamma } \right) } \right) }\\&\quad =\alpha DF\left( X \right) +bDG\left( X \right) \end{aligned}$$- (b):
Leibniz rule \(D\left( {F\left( x \right) \cdot G\left( x \right) } \right) =DF\left( x \right) \cdot G\left( x \right) +F\left( x \right) \cdot DG\left( x \right) \)
$$\begin{aligned}&D\left( {F\left( x \right) \cdot G\left( x \right) } \right) = - {{48\left( {8 - 2\gamma } \right) \left( {2 - 3\gamma + {\gamma ^2}} \right) {{\left( {{X}\left( {2 - 3\gamma + {\gamma ^2}} \right) \varGamma \left( {1 - \gamma } \right) } \right) }^{ - 1 + {1 \over {2 - \gamma }}}}{{\left( {{X}\left( {2 - 3\gamma + {\gamma ^2}} \right) \varGamma {{\left( {1 - \gamma } \right) }^{{1 \over {2 - \gamma }}}}} \right) }^{7 - \gamma }}} \over {\left( {2 - \gamma } \right) \left( {\varGamma \left( {6 - \gamma } \right) } \right) \left( { - 6 + 11\gamma - 6{\gamma ^2} + {\gamma ^3}} \right) }} \\&\quad = - {{48\left( {3 - \gamma } \right) \left( {2 - 3\gamma + {\gamma ^2}} \right) {{\left( {{X}\left( {2 - 3\gamma + {\gamma ^2}} \right) \varGamma \left( {1 - \gamma } \right) } \right) }^{ - 1 + {1 \over {2 - \gamma }}}}{{\left( {{X}\left( {2 - 3\gamma + {\gamma ^2}} \right) \varGamma {{\left( {1 - \gamma } \right) }^{{1 \over {2 - \gamma }}}}} \right) }^{7 - \gamma }}} \over {\left( {2 - \gamma } \right) \left( {\varGamma \left( {6 - \gamma } \right) } \right) \left( { - 6 + 11\gamma - 6{\gamma ^2} + {\gamma ^3}} \right) }} \\&\qquad -\, {{48\left( {5 - \gamma } \right) \left( {2 - 3\gamma + {\gamma ^2}} \right) {{\left( {{X}\left( {2 - 3\gamma + {\gamma ^2}} \right) \varGamma \left( {1 - \gamma } \right) } \right) }^{ - 1 + {1 \over {2 - \gamma }}}}{{\left( {{X}\left( {2 - 3\gamma + {\gamma ^2}} \right) \varGamma {{\left( {1 - \gamma } \right) }^{{1 \over {2 - \gamma }}}}} \right) }^{7 - \gamma }}} \over {\left( {2 - \gamma } \right) \left( {\varGamma \left( {6 - \gamma } \right) } \right) \left( { - 6 + 11\gamma - 6{\gamma ^2} + {\gamma ^3}} \right) }} \\&\quad = F\left( x \right) DG\left( x \right) + G\left( x \right) DF\left( x \right) \end{aligned}$$- (c):
Chain rule \(D\left( {G\left( F \right) } \right) \left( X \right) =DG\left( {F\left( X \right) } \right) \cdot DF\left( X \right) \)
Rights and permissions
About this article

Cite this article
Lazopoulos, K.A., Lazopoulos, A.K. On fractional bending of beams with \(\Lambda \)-fractional derivative. Arch Appl Mech 90, 573–584 (2020). https://doi.org/10.1007/s00419-019-01626-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-019-01626-w