
Abstract
We presented a pair of locusts flying loosely tethered with laterally looming discs. Two experiments tested whether looming-evoked flight behaviour was affected by the presence (1) or relative position (2) of a conspecific. We recorded: the type of behavioural response, motion within 6 degrees of freedom, behavioural onset time and duration, distance between individuals and relative direction of motion. Response distributions of the locust furthest from the stimulus (L1) were not affected by the presence or relative position of a conspecific, whereas distributions of the closer locust (L2) were affected by its position relative to the stimulus. Motion tracks of L1 were affected by the presence of L2, which generated relatively robust responses directed forward and away from the stimulus. Translational and rotational motion of L1 differed across treatments in both experiments, whereas L2 motion was less sensitive to the presence or position of a conspecific. The start and duration of the behaviour were invariant to the presence or position of a conspecific and locust pairs maintained a fixed distance during responses to looming. Results suggest that looming-evoked behaviour is influenced by visual cues from a conspecific in the vicinity.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Visually evoked collision avoidance has been studied across different animal species including locusts (Gabbiani et al. 1999; Gray et al. 2001; Santer et al. 2005a), crabs (Oliva et al. 2007), flies (Sugiura and Dickinson 2009), frogs (Nakagawa and Hongjian 2010), gerbils (Ellard 2004), birds (Sun and Frost 1998; Cao et al. 2004), fish (Preuss et al. 2006) and monkeys (Schiff et al. 1962; Maier et al. 2004). The migratory locust, Locusta migratoria L., is 1 of 12 swarm-forming acridid grasshopper species, native to semi-arid regions of equatorial Africa (Uvarov 1977) and is an excellent model system for the study of visually guided behaviour.
Locust swarms may contain millions of individuals that fly ~3 m s−1 and are surrounded by neighbouring conspecifics 0.3–0.9 m apart (Uvarov 1977). Interestingly, despite the apparently random orientation of groups of individuals within the swarm, continuous cohesion of individual swarms over distances of hundreds of kilometres, lasting many days, has been observed to occur without significant dispersion (Baker et al. 1984; Preiss and Spork 1993). This may be due to an ability to avoid predation and effectively navigate within the swarm without constantly colliding with one another. The ability to manoeuvre quickly and appropriately in such a dense swarm is of considerable adaptive value (Baker et al. 1981).
To avoid predators, collision with conspecifics and navigate through complex environments, appropriate behavioural responses to visual stimuli are essential. Locusts possess well-described neural pathways that are tuned to looming detection (O’Shea and Williams 1974; Simmons and Rind 1992; Judge and Rind 1997; Gabbiani et al. 2001; Gray et al. 2001; Gray 2005) and convey information to motor centres in the thorax (Burrows and Rowell 1973; Simmons 1980) involved in initiating flight avoidance responses and other escape behaviours (Santer et al. 2005b, 2006; Dewell and Gabbiani 2012; McMillan et al. 2013). These circuits allow each locust within a dense swarm to remain sensitive to approaches of individual objects, including conspecifics and flying predators, approaching frequently from many directions or along the same trajectory (Burrows and Rowell 1973; Simmons 1980; Gray 2005; Guest and Gray 2006; Santer et al. 2006).
A locust’s natural visual environment consists of a complex combination of translating, receding and looming visual stimuli that are produced by self-motion as well as by object motion and individuals will be presented with multiple objects travelling through the visual field along various trajectories (Uvarov 1977). Collision avoidance responses to looming stimuli are adaptive behaviours that allow the animal to manoeuvre in a complex environment. Recent studies using minimally restrained locusts describe 3-dimensional behavioural responses to looming and relationships with underlying motor activity (Chan and Gabbiani 2013; McMillan et al. 2013).
Avoidance behaviour of a single locust may differ from that of an individual in a group and collision avoidance responses elicited by an approaching object may be influenced by the presence of a conspecific as well as each animal’s position relative to the looming object and/or its position within the group. As a first step in understanding looming responses of a locust in the presence of conspecifics, we used pairs of loosely tethered locusts to test whether looming-evoked flight behaviour is affected by the presence and/or relative position of a conspecific.
Materials and methods
Animals
Migratory locusts, Locusta migratoria L., were reared under crowded colony conditions (25–28 °C, 12 h: 12 h light: dark) in the Department of Biology at the University of Saskatchewan. We selected healthy locusts that were 3–4 weeks past the imaginal moult and had intact wings and similar body lengths. All experiments were carried out at room temperature (~25 °C).
Preparation
A previously described loose tether (McMillan et al. 2013) was attached to the pronotum of fully intact locusts (Fig. 1a). Tethered locusts were positioned at assigned coordinates in the wind tunnel (1 m height × 1 m width × 3 m length). We set the wind speed to 3 ms−1 [average locust flight speed (Baker et al. 1981)], which hot wire anemometer measurements confirmed was consistent throughout the working volume of the wind tunnel. Locust 1 (L1) was placed 45 cm from the upwind end of the tunnel and 45 cm from the right side while Locust 2 (L2) was placed at various positions (see below) 15 cm from the right side of the wind tunnel. Accordingly, L1 and L2 were spaced 30 or 36 cm apart within a volume of space (Fig. 1b, c). This distance was based on measurements of locust spacing in dense stratiform swarms (Uvarov 1977). The length of the tether (45 cm for L1; 25, 45 or 65 cm for L2), permitted unrestricted initial collision avoidance and initial freedom of movement in space while preventing potential contact between individuals in a pair. Loosely tethered locusts consistently oriented upwind, maintaining a relatively fixed position (±5 cm), from the vertical projection of the tether anchor point on the roof of the wind tunnel, within each plane of 3D space. This value represents the extreme of displacement during stable flight. Typically, locusts maintained a position within ±2 cm. Locusts were illuminated from above using two halogen lamps (LOWELPRO-LIGHT, Mfg, Inc, New York, USA). Prior to stimulus presentation in each trial, locusts were allowed to fly for ~5 min to allow them to adopt a stable flight posture. In stable flight, locusts beat their fore and hind wings symmetrically with raised prothoracic legs adducted to the pronotum, mesothoracic legs trailing down the sides of the thorax and the metathoracic legs flexed and placed below the abdomen. Subsequently, locusts were presented with looming stimuli at 2- to 5-min intervals, to avoid behavioural habituation. If over three consecutive trials a locust did not respond to the looming stimulus, it was not used for experimentation. This criterion resulted in data collected from 19 pairs of locusts in Experiment 1 and 18 pairs in Experiment 2.

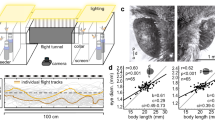
Experimental set-up and treatments. a Top view of the wind tunnel (1 m × 1 m × 3 m) equipped with two high speed digital cameras (50 frames/s, 1/120 s shutter speed). A pair of locusts (L1 and L2) were suspended in the wind tunnel facing upstream of the air flow. The visual stimulus was a computer-generated simulation of a black 7 cm disc approaching against a white background projected onto a rear projection screen attached to the right side of the wind tunnel. The data acquisition computer synchronized behavioural flight data from the video cameras and stimulus parameters from the stimulus generation computer (see “Methods” for details). The inset shows one video frame of the rear view of a locust with the tether (yellow line) and ring with marked points used to calculate body position and orientation. Red top tether mark, green right tether mark, yellow bottom tether mark, blue left tether mark. b Rear perspective view of the wind tunnel (not to spatial scale) showing the position of each locust in Experiment 1 (see “Methods” for details). The initial distance between two locusts within the azimuthal plane was 30 cm. P1 position 1, P2 position 2. c Rear perspective view of the wind tunnel (not to spatial scale) showing the position of each locust in Experiment 2 (see “Methods” for details). For each treatment, L1 was placed at P1. L2 was placed at one of five different positions (P2–P6) in treatments 2–6, respectively. Different sized locust images at P3 and P4 represent the position in depth, within the same azimuthal plane, relative to L1 (P3 front, P4 back, P5 above, P6 below). The black oval on the right side of the tunnel in b and c represents the relative, perspective view of the final frame of the approaching black disc
Flight behaviour was recorded at 50 frames per second (fps, shutter speed = 1/120 s) from behind using two high-speed video cameras (Motion scope, Redlake Camera, Inc. San Diego, USA). The cameras were positioned at the same height and 1.5 m downwind of the locusts. The cameras were separated by 30° as measured from a fixed point between the locust pair. In that position, the left camera was angled ~15° to the right while the right camera was ~15° to the left, providing two fields of view of the entire volume of space in which the locusts were free to manoeuvre. Each of the 11 treatments (positions) was replicated 20 times for a total of 220 video recordings. The duration of each recording was 40 s and the duration of the stimulus epoch in each was 4 s (see below).
Visual stimuli
In 11 treatments across both experiments, locusts were exposed to the same visual stimulus; a computer-generated 7 cm diameter dark disc (7 cd m−2) against a white background (45.5 cd m−2) with a contrast ratio of 0.73, approaching at 3 ms−1. Stimuli were created using Vision Egg visual stimulus generation software (Straw 2008) on a python programming platform. Discs were presented as 512 × 512 pixel portable network graphics (png) files. The stimulus was scaled in real time at 85 fps and projected onto a rear-projection screen (96 cm long × 64 cm high) placed against the right side of the wind tunnel using a Sony VPL-PX11 data projector (Fig. 1). A white cardboard sheet (96 × 64 cm) was attached to the side of the wind tunnel opposite the projection screen to balance the luminous flux within the recorded volume of 3D space and prevent reflection of the projected stimulus. Discs were presented at 0° elevation and 90° azimuth. In this orientation 0°, +90° and −90° elevation was directly at the locust eye equator, above and below the locust head, respectively, whereas 0° azimuth was directly in front of the locust head and 180° was directly behind. In this way, the image of the disc expanded along a trajectory perpendicular to the centre of the right eye of L1 (and L2 in appropriate treatments). Projection of the looming stimulus was triggered manually, approximately 5 min after the locust maintained stable flight. At its final position, 60 cm and 30 cm from the initial position of L1 and L2, respectively, the disc subtended 6.5° and 13° of each locust’s visual field of view. We aligned video frames with the projected time of collision (TOC) using techniques similar to those described previously (McMillan et al. 2013).
Experiment 1
The first experiment was designed to determine if locust collision avoidance was affected by the presence of a conspecific in the vicinity. For this experiment, we used 38 adult male locusts (19 pairs). This experiment was divided into five treatments of which the first two served as controls (Fig. 1b). In the controls, locusts (L1 and L2) were placed alone in one of two positions, P1 or P2, respectively. In the 3rd and 4th treatments, locusts were placed at the same positions separately with a dead locust placed in the other position. The dead locust, with folded legs and outstretched fore and hindwings at 90° elevation angle (perpendicular to the body), passively oriented with the head upwind in the airstream. The rationale for use of a dead locust was to test whether the presence of a conspecific, irrespective of collision avoidance behaviour, would influence the live locust’s response. As the final treatment, both live L1 and L2 were placed at their initial positions simultaneously. To avoid potential effects of habituation or learning, treatments were randomly ordered, with a different order for each locust pair.
Experiment 2
The purpose of the second experiment was to determine if collision avoidance is affected by the relative position of a conspecific in the vicinity. To address this question we used a different group of 40 adult male locusts (20 pairs) divided into six treatments. In each treatment L1 was placed at P1 (Fig. 1c). In treatment 1, L1 was alone, whereas for treatments 2–6, L1 was paired with L2 placed in positions P2–P6. In treatment 2, L1 and L2 were separated by 30 cm in the azimuthal plane. In treatments 3 or 4, L2 was placed 20 cm ahead (P3) or behind (P4) L1 in the z-plane, respectively. In treatments 5 and 6, L2 was placed 20 cm above (P5) or below (P6) L1 in the elevation plane, respectively. Thus, for each of treatments 3–6, the initial distance between L1 and L2 was 36 cm. As in Experiment 1, treatments were randomly ordered for each locust pair.
Data collection
Images recorded by the cameras were saved to disc as AVI files. Video sequences were then analysed frame by frame using WINanalyze (Mikromak, Berlin, Germany), 3D motion analysis software. Given the sampling rate of the cameras used to record behaviour (50 fps) and the relatively large field of view required to include the locust pair, we were unable to resolve detailed wing kinematics that are involved in 3D body orientation (McMillan et al. 2013). Therefore, the behavioural measures used here included observations of body orientation, leg extension and abdominal movement. While these measurements may result in overestimation of the reaction time, they nevertheless provide information on the relative behaviours of each locust. After carefully studying each video recording, locust behaviour was categorized into the most prevalent types: (1) active steering, (2) gliding and (3) startle. Active steering involved movement away from or toward the stimulus, extension of the hind leg on the inside of the turn and movement of the abdomen either directly upwards or upwards and to one side (left or right) of the animal’s longitudinal midline. Gliding was defined as cessation of the wing beat upon symmetrical elevation of the fore and hind wings and holding of the wings in an elevated position above the locust’s back (see also Santer et al. 2005a). Startle was defined as either (1) interruption of the wing beat, folding all four wings backward and leg extension or (2) deflection of the abdomen, extension of all legs and rapidly flying forward within a 90° sector (45°–345°) in the frontal region of the azimuthal plane. The trials in which a particular type of response was viewed were counted and the numbers were used to determine the percentage of occurrence of each response separately. While loosely tethered locusts can generate more than one behavioural response during presentation of a looming stimulus (Chan and Gabbiani 2013; McMillan et al. 2013), we focused analysis on the initial response to compare response timing and duration between locust pairs.
Following 3D calibration of the paired sets of video frames from the two cameras (see McMillan et al. 2013), the position of the tether markers was converted into 3D coordinates (x, y and z) for each frame. These coordinate values were imported into Dataview 6.3.2 analysis software (St Andrews University, Scotland, 1999) along with the stimulus timing information to align coordinates with TOC (Fig. 2). Subsequently, the numerical values from Dataview were used to determine four measurements for each experiment: (1) the direction of the initial avoidance response and extent of motion along three translational (Experiments 1 and 2) and three rotational (Experiment 1) degrees of freedom at the peak of the response; (2) timing of the initial response relative to TOC for each locust; (3) duration of the initial response (i.e. time from the start to peak of the initial response = behavioural epoch); and (4) direction and distance between each locust at the time of the peak of the initial response.

Sample video frames and flight position data from a single pair of locusts that generated steering responses (Experiment 1, treatment 5). a Representative time-aligned single video frames from each camera showing the relative position of each locust during straight flight. b Translational (x, y and z) coordinates of L1 (black solid line) and L2 (red solid line) time aligned to the projected time of collision with L2 (0 s). The grey shaded area represents the stimulus epoch. Positive (negative) deviations along the x, y and z axis represent movement to the right (left), up (down) or forward (back), respectively. Colour-coded arrows indicate the start of the response. Vertical black and red dashed lines indicate the peak of deflection for L1 and L2, respectively. y-translation was very small throughout the trial and did not produce a discernible start or peak for either locust
Translational positions within the x-, y- and z-planes were determined directly from the x-, y- and z-coordinates, respectively, of the bottom tether mark. Right, upward and forward translations were designated as positive values, relative to each locust’s initial position whereas left, downward and backward movements were designated as negative values. In Experiment 1 we calculated Euler angles, as representations of the three rotational degrees of freedom [roll (η), pitch (χ) and yaw (ψ)], using the x-, y-, and z-coordinates of all four tether markers (see McMillan et al. 2013). For example, to calculate η, we used x- and y-coordinates for the top (t) and bottom (b) marks on the tether disc, where b x is the x-coordinate on the bottom marker, t x is the x-coordinate on the top, t y is the y-coordinate on the top and b y is the y-coordinate on the bottom (Eq. 1). χ was calculated using the y- and z-coordinates for the top and bottom tether marks (Eq. 2), and ψ was calculated using the x- and z-coordinates for the left (l) and right (r) marks (Eq. 3):
Our calculations were based on an intrinsic coordinate system, which changed with each elemental rotation. This approach allowed us to assess rotational angles on a frame-by-frame basis and describe response dynamics within a behaviour epoch. All rotational angles were calculated relative to 0°, in the respective plane, of a locust generating stable flight without visual stimulation. For η, 0° was perpendicular to the midline of the locust when viewed from behind, whereas for χ and ψ, 0° was directly in front of the locust as viewed from the side or above, respectively. A positive angle value was designated for rotation to the right (clockwise) for η and ψ and upward rotation for χ.
To account for variability of responses between trials, we normalized the data from each trial to values obtained from the relevant control treatments in each set of experiments. To determine the relative response in each treatment, data from measurements 1, 2 and 3 (extent of deviation along six degrees of freedom, time of the initial response and duration of the initial response, respectively), were first normalized to those of the control treatments for each animal. In the normalization, relative values in control treatments were considered as 1 for measurement 1, and 0 for measurements 2 and 3. For the first measurement, normalization was carried out by dividing treatment values by the control value (1). By this convention, positive values indicate motion in the same direction relative to the control and negative values indicate motion in the opposite direction. Values between 1 and −1 indicated a lesser extent of motion compared to control values, whereas values >1 or <−1 indicated a greater extent of motion, irrespective of direction. Data were plotted based on each initial direction of motion or pooled from each direction. For the second and third measurements, treatment values were subtracted from the control value (0).
To describe temporal response parameters we measured the start of the initial response and the duration of the behavioural epoch (Fig. 2). The timing of the start of the initial response was determined as the time of the frame in which a response (defined above) was first detected and the epoch duration was determined by taking the time difference between the onset and the peak of the initial avoidance response (the frame in which the highest magnitude of the initial response was visible on relevant plots of the x, y, z coordinates).
We calculated the euclidian distance between each locust (using the bottom mark on each tether) at the start and end of the behavioural epoch in each experiment using the following formula:
where D is the distance and x, y and z are the relative coordinates of the bottom tether mark of L2 and L1, respectively. To determine if the distance was affected by movement of each individual, we also calculated the distance based on the hypothetical condition that the other locust (either L1 or L2) stayed in a fixed position (estimated by calculating the mean x, y, z coordinates during the first 5 s of each trial, during the pre-stimulus epoch). For experiment 1, we calculated the difference between the actual and hypothetical distance at the start and peak of the behavioural epoch. For experiment 2, we calculated the difference at the peak of the behaviour. In addition, to assess whether the response of each locust was related, the number of trials in which both locusts flew in the same direction (i.e. either to the left or right in the azimuthal plane) at the onset of the response was determined as a percentage of all trials.
Data analysis
Data were plotted using SigmaPlot 10.0 (Systat Software Inc., Richmond, CA, USA) and analysed statistically using SigmaStat 3.5. Data were tested for normality and equal variance. Distribution of behavioural response types were compared using a McNemar’s test for repeated measures on categorical data. To compare temporal response properties, response magnitudes within translational and rotation degrees of freedom as well as distances between L1 and L2, we used a Friedman Repeated Measures ANOVA on Ranks. Significant differences between treatments were assessed using a Tukey post hoc pair-wise multiple comparison test. Treatments were considered significantly different at P < 0.05.
Results
Types of responses
Across all animals and treatments in both experiments, L1 and L2 displayed all three behaviours (gliding, active steering or startle), with most displaying active steering in at least one trial (n = 29 of 37 locusts). In Experiment 1, analysis of the response distributions (McNemar’s test) showed no significant differences across treatments for either L1 (Fig. 3a, top panel) or L2 (Fig. 3a, bottom panel). Moreover, there were no significant differences between comparable treatments of each locust (i.e. treatment 1 (L1) vs treatment 2 (L2), treatment 3 (L1) vs treatment 4 (L2), treatment 5 (L1 vs L2)). In Experiment 2, while startle was the most prominent response generated by L1 in all treatments (Fig. 3b, top panel), there were no significant differences in the distribution of behaviours across all treatments. L2 also displayed each of the three responses (Fig. 3b, bottom panel), with active steering as the most prominent in treatments 2 (L2 beside L1), 3 (L2 in front of L1) and 4 (L2 behind L1) and least prominent in treatment 6 (L2 below L1). The response distribution in treatment 6 differed significantly from the distributions in treatments 2 (\(\chi_{3}^{2}\) = 11.0, P = 0.01) and 4 (\(\chi_{3}^{2}\) = 9.3, P = 0.02). The distributions between treatments 4 and 5 (L2 above L1) also differed significantly (\(\chi_{3}^{2}\) = 10.0, P = 0.02)). When comparing between L1 and L2 we found significant differences in the response distributions in treatments 2 (\(\chi_{3}^{2}\) = 9.0, P = 0.03) and 3 (\(\chi_{3}^{2}\) = 8.3, P = 0.04), with L2 consistently generating a greater percentage of active steering.

Distribution of initial behavioural response types. a Data from Experiment 1 (n = 19) showing response distributions from all treatments for L1 (upper panel) and L2 (lower panel). b Data from Experiment 2 (n = 18) showing response distributions from all treatments for L1 (upper panel) and L2 (lower panel). Pairs of circles along the x axis in a and b represent treatment details. Left filled circles represent L1, right filled circles represent L2, x represents the absence of a locust and an open circle in either position represents a dead locust. In b relatively small and large filled circles in treatments 3 and 4 represent L2 in front of or behind L1, respectively. A right filled circle above (treatment 5) or below (treatment 6), a left circle represents L2 as being above or below L1, respectively. See “Methods” for details of treatments. c Pooled data from Experiments 1 and 2 in which locusts were either alone or paired. Data for L1 alone (L1, n = 37) were pooled from treatment 1 in each experiment. Data for L2 alone (L2, n = 19) were taken from treatment 2 in Experiment 1. Data from locust pairs were pooled from treatments 5 and 2 in Experiments 1 and 2, respectively. L1 + L2 (n = 37) represents data from L1 in the presence of L2 whereas L2 + L1 (n = 37) represents data from L2 in the presence of L1. Differences in response distributions were assessed using a McNemar’s repeated measures test. In b, red asterisks for treatments 2 and 3 in L1 represent significant differences between treatments 2 and 3 for L2 (black asterisks) whereas similar black symbols within L2 represent significant differences between treatments. In c asterisks represent a significant difference between L1 and L2 and error bars represent the upper and lower 95 % confidence intervals
For L1, the response distributions were noticeably different for comparable treatments in Experiments 1 and 2 (treatment 1 in each and treatments 5 and 2, respectively), demonstrating variability between the two groups of locusts placed at P1. Therefore, to increase the sample size, we pooled data from comparable trials in Experiments 1 and 2 to better assess whether there was an effect of treatment on response distributions (Fig. 3c). While we pooled data from treatment 1 in each experiment (L1 alone, n = 37) and treatments 5 and 2 in Experiments 1 and 2, respectively (L1 plus L2 in the same relative positions, n = 37), for L2 alone we were only able to use data from treatment 2 in Experiment 1 (n = 19). Therefore, comparisons between L1 alone and L2 alone were from data in Experiment 1 only. The only difference in the response distributions was between L1 and L2 when paired with a live conspecific (\(\chi_{3}^{2}\) = 14.29, P = 0.003). Specifically, the percentage of animals that produced gliding, steering or startle responses, respectively, were 22 % (n = 8), 32 % (n = 12) and 46 % (n = 17) for L1 and 13 % (n = 5), 76 % (n = 28) and 11 % (n = 4) for L2, demonstrating that L2 generated significantly more steering responses. While the response distribution of L2 alone resembled that of L2 when paired with L1, the lack of a significant difference between L2 alone and L1 alone may have been due to a relatively low sample size and response variability (the 95 % confidence interval widths for data in Fig. 3c range from 19 to 46 %). Taken together, these findings suggest that, while the responses were variable, L1 response distributions were not affected by the presence or position of L2 and that L2 responses varied according to the treatment type.
Flight tracks
We examined the flight tracks of each locust based on the position coordinates in successive video frames during the behavioural epoch (Fig. 4). Before comparing tracks between treatments, we classified responses as either active steering or non-active steering, with the latter including gliding and startle. While active steering resulted in more pronounced left or right motion in the azimuthal plane (Supplementary Figs. 1 and 2) for L1 and L2, glides and startle responses also resulted in lateral motion. Therefore, for subsequent analysis of motion tracks and associated parameters, we compared treatments using data from all animals, irrespective of the behavioural type.

Motion tracks of L1 and L2, in response to laterally looming stimuli. a Perspective view of 3D flight tracks of a representative pair of locusts (treatment 5, Experiment 1) responding to a single approach. Each locust image and red dotted drop line represents the position of the locust at the initiation of the response. Red lines indicate the 3D flight track from response initiation to peak. The dark oval represents the perspective view of the disc approaching from the right of L2. Data from Experiments 1 (b, n = 19) and 2 (c, n = 18) showing 2D motion tracks during a behavioural epoch as selected from the entire recording sequence represented in the azimuthal plane (as viewed from above, top panels) and elevation plane (as viewed from the right side, bottom panels) for each locust across all trials. Legends in b indicate respective treatments for L1 and L2, whereas the legend in c (lower left panel) indicates treatments in all 4 panels (note that L2 was not present for treatment 1). Axes in a represent the actual position within the wind tunnel coordinate system whereas axes in b and c were aligned relative to the initial position at the start of the recording (x, y, z coordinates = 0,0,0). Inset in each graph plot shows the average motion vectors from all animals during the first 2 frames of the behavioural epoch. For all data, positive (negative) deviations along the x, y and z axes represent movement to the right (left), up (down) or forward (back), respectively
Three-dimensional flight tracks revealed that motion was most prominent in the azimuthal plane (Fig. 4a) and we, therefore, examined 2D motion track details in the azimuthal and elevation planes. In Experiment 1, L1 motion tracks in treatments 1, 3 and 5 were confined to a range along the x axis of approximately ±10 cm from the start of the response (Fig. 4b, top left panel), whereas L2 motion tracks extended in a range of approximately ±20 cm (Fig. 4b, top right panel). For L1, locusts tended to fly to the right or left equally, whereas L2 tended to fly mostly to the left, away from the stimulus. In the z axis, L1 and L2 tracks extended along similar ranges of −5 to 15 cm, with most locusts flying forward. Conversely, motion tracks for L1 generally extended over a relatively narrow range in the y axis (±2 cm) compared to tracks from L2 (−2 to 7 cm, Fig. 4b bottom panels). In Experiment 2, L1 motion tracks were consistently confined to a relatively narrow range along the x axis (±7.5 cm) and deviated equally to the right or left (Fig. 4c top left panel), whereas L2 motion tracks extended over a wider range (±10.0 cm) and deviated mostly to the left (Fig. 4c top right panel), away from the stimulus. Both L1 and L2 tended to fly forward in the z axis. As in Experiment 1, motion within the y axis was confined to a narrow range (−1.5 to 2.0 cm) that was similar for L1 and L2 (Fig. 4c bottom panels).
To describe the direction of motion at the start of each behavioural epoch, we calculated the average motion vector over the first two video frames (aligned to coordinate 0,0 at the start of the behaviour, insets in Fig. 4b, c). In Experiment 1 (Fig. 4b), these vectors showed that, on average, L1 flew forward and to the left when alone (treatment 1) or forward, by a smaller extent, in treatments 3 and 5 with little deviation to the right or left. Conversely, L2 flew, on average, forward and to the left in all treatments. There was very little change in average altitude for L1, irrespective of treatment type and L2 gained altitude only when paired with L1 (treatment 5). Data from Experiment 2 (Fig. 4c) showed that, for L1, the average vectors were forward and near the longitudinal midline, except for treatment 2, in which the vector was directed further to the left. For L2, the average vector for all treatments was forward and to the left of the longitudinal midline. Within the y axis, the average vectors were distributed narrowly around zero. In summary, data from both experiments show that the presence of a dead or live conspecific affected the initial direction of motion of L1, whereas L2 tended to move away from the stimulus across most treatments.
Motion within six degrees of freedom
To determine if the treatment type influenced response amplitude, we compared the normalized values of movement within 3 translational (x, y and z; Figs. 5a and 6) and 3 rotational (roll, pitch and yaw; Fig. 5b) degrees of freedom at the peak of the behavioural epoch (see Methods for normalization procedure). Data were plotted either in relation to the direction of motion in the control conditions (left or right for the x axis, up or down for the y axis and forward or back for the z axis) or pooled and compared against a normalized value of 1 using a Repeated Measures ANOVA on Ranks.

Statistical summary of direction and normalized extent of the initial avoidance response within three 3 translational (a) and rotational (b) degrees of freedom of L1 (left panels, n = 19) and L2 (right panels, n = 19) from Experiment 1. Data were plotted as box plots representing the median with 25th and 75th percentiles. Whiskers show the 5th and 95th percentiles. Positive values indicate movement in the same direction as in the control treatments whereas negative values indicate movement in the opposite direction. Values >1 or <−1 represent deviations greater than those of control conditions (dashed horizontal lines) whereas values between −1 and 1 represent deviations less than those of control conditions. Data were plotted either in relation to the direction of motion in the control conditions (see “Methods”) or pooled from both control directions. Asterisks indicate significant differences (P < 0.05) from control values. Pairs of circles along the x axis represent treatment details as in Fig. 3 (see “Methods” for details). In b η = roll, χ = pitch, and ψ = yaw

Statistical summary of direction and normalized extent of the initial avoidance response within three 3 translational degrees of freedom of L1 (left panels, n = 18) and L2 (right panels, n = 18) from Experiment 2. Data plotted as in Fig. 5. Positive values indicate movement in the same direction as in the control treatments whereas negative values indicate movement in the opposite direction. Values >1 or <−1 represent deviations greater than those of control conditions (dashed horizontal lines) whereas values between −1 and 1 represent deviations less than those of control conditions. Pooled data as described in Fig. 5. Asterisks indicate significant differences (P < 0.05) with control values. Pairs of circles along the x axis represent treatment details as in Fig. 3 (see “Methods” for details)
In Experiment 1, the treatment and initial control direction significantly affected translational motion. Generally, for L1 (Fig. 5a left panels) the presence of a conspecific (dead or alive) resulted in decreased translation in all three axes. Specifically, compared to the control, the L1 median pooled x-translation was significantly lower in treatments 3 and 5 (\(\chi_{2}^{2}\) = 10.71, P = 0.005) and the median left translation was lower in treatment 3 (\(\chi_{2}^{2}\) = 8.17, P = 0.02). The median normalized translational motion was also significantly lower for pooled y-data in treatment 3 (\(\chi_{2}^{2}\) = 7.41, P = 0.02), pooled z-data in treatments 3 and 5 (\(\chi_{2}^{2}\) = 15.90, P < 0.001) and forward z-translation in treatments 3 and 5 (\(\chi_{2}^{2}\) = 12.82, P = 0.002). For L2 (Fig. 5a right panels), there was no effect of treatment type or initial direction on the normalized extent of x or z-translation. Compared to controls, the median y-translation in treatment 4 was significantly lower for pooled (\(\chi_{2}^{2}\) = 10.84, P = 0.004) and downward (\(\chi_{2}^{2}\) = 7.40, P = 0.025) responses.
The presence of a conspecific also affected normalized roll and yaw rotation of L1 and yaw rotation of L2 but did not affect normalized pitch rotation for either locust (Fig. 5b, left panels). Compared to the control, the median pooled roll of L1 was significantly lower and reversed (<0) in treatments 3 and 5 (\(\chi_{2}^{2}\) = 14.00, P < 0.001) and the median initial left roll was lower and reversed in treatment 5 (\(\chi_{2}^{2}\) = 10.33, P = 0.002). The median pooled yaw was also significantly lower and reversed in treatments 3 and 5 (\(\chi_{2}^{2}\) = 8.22, P = 0.02). For L2, the median yaw was significantly lower and reversed for pooled (\(\chi_{2}^{2}\) = 9.56, P = 0.006) and an initial right yaw (\(\chi_{2}^{2}\) = 6.50, P = 0.042) in treatment 5.
Data from Experiment 2 also showed that the treatment and initial control direction significantly affected translational motion (Fig. 6). For L1 we set treatment 1 (L1 alone) as the control treatment and for L2 we set treatment 2 (L2 beside L1) as the control. There was a significant effect of the treatments on L1 translational motion (Fig. 6, left panels), though the effects varied depending on the treatment type. There was a significant effect of treatment on initial left x-translation (\(\chi_{5}^{2}\) = 11.78, P = 0.04), though a Tukey post hoc comparison showed no differences between individual treatments. Compared to controls, the median y-translation was significantly lower in pooled treatments 2, 3 and 6 and reversed in treatments 2 and 6 (\(\chi_{5}^{2}\) = 18.54, P = 0.002). Initial downward y-translation was significantly lower and reversed in treatments 2, 3, 5 and 6 (\(\chi_{5}^{2}\) = 21.50, P < 0.001). The median z-translation was significantly lower than control in pooled treatments 2 and 4 (\(\chi_{5}^{2}\) = 13.54, P < 0.019).
For L2, the median pooled x-translation (Fig. 6, right panels) in treatment 5 was significantly lower than control (\(\chi_{4}^{2}\) = 13.42, P = 0.009) and there was a significant effect of treatment for initial left translation (\(\chi_{4}^{2}\) = 14.30, P = 0.006) though post hoc comparison showed no differences between individual treatments. There were no significant differences in y-translation for any treatment types for L2. For z-translation, the only differences from control were significantly lower values for pooled (\(\chi_{4}^{2}\) = 18.50, P < 0.001) and initial foreword motion (\(\chi_{4}^{2}\) = 21.00, P < 0.001) in treatment 5. There was also a significant effect of treatment on initial backward motion (\(\chi_{4}^{2}\) = 9.60, P = 0.048) though post hoc comparison showed no differences between individual treatments.
In summary, though responses were highly variable for L1 and L2, data from both experiments suggest that different treatments mostly affected translational and rotational components of steering behaviour in L1 and that L2 responses were relatively less sensitive to the presence or position of a conspecific.
Temporal response properties
To determine if the presence of a conspecific aligned between L1 and the stimulus (Experiment 1) or the relative position of a conspecific (Experiment 2) affected temporal properties of looming-induced flight responses, we compared the start time and duration of the behavioural epoch (see “Methods”, data not shown). From Experiment 1 (n = 19), we found no significant differences in the median values of either the absolute (range = 1.5–0.02 s before collision) or normalized (range = −0.70 to 0.46 s) start times between L1 and L2 across all treatments. There were also no significant differences in the response duration for L1 or L2 across all treatments for absolute (range = 0.13–0.91 s) or normalized values (range = −0.44 to 0.45 s). From Experiment 2 (n = 18), we found that the median start times across all treatments ranged from 0.89 to 0.84 s (before projected collision with L2, data not shown) and were affected by treatment type (\(\chi_{10}^{2}\) = 22.25, P = 0.014). A post hoc Tukey test revealed that L2 responded significantly earlier in treatment 5 (median = −0.89 s) compared to L1 in treatment 1 (median = −0.84 s) and L2 in treatment 2 (median = −0.85 s). However, when normalized to response times for respective control values, there were no significant differences for L1 or L2 in any treatment (range = −0.87 to 1.32 s). Neither the absolute (range = 0.46–0.61 s) nor normalized (range = −0.43 to 0.81 s) response durations were affected by the treatment type for either L1 or L2. These findings suggest that the presence or position of a conspecific had little or no effect on temporal response properties.
Distance between locusts and response direction
At the start of Experiment 1 (treatment 5), locusts were placed 30 cm apart and we measured the euclidian distance between the bottom of each respective tether marker. A representative sample recording showed that throughout the pre-stimulus epoch and during the earlier stages of stimulus presentation, locusts maintained a relatively consistent distance (Fig. 7a). Nearer to the projected time of collision (with L2) the distance decreased to 23 cm and then increased to 35 cm. At the peak of the response (see Fig. 2) throughout all trials, locusts maintained a distance within ±10 cm (Fig. 7b). Therefore, the distance values were within a theoretical range of ±10 cm based on maximum excursions that each locust uses to maintain its position during pre-stimulus flight (±5 cm). To determine if spacing changed at different stages of the response, we calculated the distance at the start and peak of each of the behavioural epochs for L1 and L2 for all pairs and found that there were no significant differences in the median distances (31.2 cm for each group and time). Similarly, in Experiment 2, locusts maintained a relatively constant euclidian distance at the start and peak of each locust’s behavioural epoch. For treatment 2 (L2 beside L1), locusts were initially placed 30 cm apart and the median distance from all data ranged from 29.7 to 32.0 cm. There were no significant differences compared to the initial distance or between each time of measure (data not shown). For treatments 3–6 the initial distance was 36 cm and the median values at each time ranged from 32.3 to 36.5 cm (data not shown). There was a significant affect of treatment on absolute distances (\(\chi_{10}^{2}\) = 46.28, P < 0.001). Post hoc comparisons revealed that the distance at the onset of the response in treatment 4 was greater than the initial distance (36 cm) and that the distance at the peak of the response in treatment 3 was less than the distances at the response onset in treatments 4–6 (data not shown).

Distance between L1 and L2 during looming-evoked responses. a Sample record from one trial in Experiment 1 (treatment 5) plotting distance against projected time of collision with L2 (vertical solid red line). The dashed vertical red line indicates time of projected collision with L1 and the shaded area defines the stimulus epoch. b Distance between L1 and L2 across all trials from treatment 5 in Experiment 1 at the time of the peak response of L1 and L2. c Relative distances from all trials in Experiment 1 (n = 19) at the time of response onset and peak for L1 and L2. d Relative distances from all trials in Experiment 2 (n = 18) at the time of the peak of the response. In b–d data form L1 and L2 are represented by light and dark grey shading, respectively. In c and d data were plotted as box plots representing the median with 25th and 75th percentiles. Whiskers show the 5th and 95th percentiles. The dashed horizontal lines in b–d represents the initial distance at the start of respective trials (see “Methods” for details). Pairs of circles along the x axis in d represent treatment details as in Fig. 3 (see “Methods” for details)
Given that the distance between the pair could be affected by movement of each individual, we also calculated the relative distance based on the hypothetical condition that the other locust (either L1 or L2) stayed in a fixed position (see “Methods”). For experiment 1, we calculated the difference between the actual and hypothetical distance at the start and peak of the behavioural epoch. For Experiment 2, we calculated the difference at the peak of the behaviour. For both datasets, we also determined if the relative distances differed from a theoretical value of 0 (i.e. no movement of either member of the pair). Using a repeated measures ANOVA on Ranks, we found no differences in the relative distances in either Experiment 1 (Fig. 7c) or Experiment 2 (Fig. 7d).
To determine if the locusts responded in unison, we determined the percentage of trials in which the initial steering direction was the same for each individual (data not shown). In Experiment 1, 68 % (n = 13) of locust pairs (treatment 5) steered in the same x-plane direction, whereas 32 % (n = 6) flew in the opposite direction. In Experiment 2, 50 % or more of locust pairs flew in the same initial direction in the x-plane when responding to looming (treatment 2 = 61.1 %, treatment 3 = 50.0 %, treatment 4 = 55.5 %, treatment 5 = 66.7 %, treatment 6 = 66.7 %).
In summary, these findings suggest that locusts in a pair maintained a relatively constant distance during collision avoidance and most often moved in the same direction at the start of a response.
Discussion
To our knowledge, this is the first study to investigate whether collision avoidance responses of loosely tethered locusts are affected by the presence or position of a conspecific in the vicinity. We found that each locust generated variable responses distributed across three distinct types: gliding, active steering and startle. The response distributions of the locust furthest from the stimulus (L1) were not affected by the presence or relative position of a conspecific, whereas responses of the locust closest to the stimulus (L2) were likely affected by its position relative to the stimulus. Moreover, we found that motion tracks of L1 were affected by the presence of L2 and that L2 generated more robust responses, with average motion vectors consistently directed forward and away from the stimulus. We also found that translational and rotational motion of L1 differed across treatments, whereas L2 motion was less sensitive to the presence or position of a conspecific. Finally, we found that the start and duration of the behavioural epoch were invariant to the presence or position of a conspecific and that a locust pair maintained a relatively fixed distance during responses to looming.
While it is possible that other, uncontrolled, factors associated with the experimental set up could have affected responses to looming, we believe that they were minimal. Tethering artefacts ultimately restrict locust motion in 3D space and thus would influence reactions of individuals over a longer time span than we recorded here. However, as we focussed on initial responses using a tether design that has been demonstrated to permit closed-loop flight (Chan and Gabbiani 2013; McMillan et al. 2013), we are confident that locusts generated behaviours that reflect natural reactions. It is possible that differences between L1 and L2 resulted from the relative difference in brightness of the rear projection screen closer to L2 or differences in the visual surround associated with each locust’s relative position within the wind tunnel. The former was mitigated through equal ambient lighting from the overhead halogen lights and balancing of the luminous flux in the recorded volume of 3D space. The latter was likely not a confounding variable as each locust maintained a stable flight posture prior to stimulation, indicating that there was no inherent bias associated with position in the wind tunnel. Moreover, in Experiment 2, L2 positions varied by no more than 20 cm from the centre of the projection screen. Given that the projection screen subtended a large portion of the locust’s visual field irrespective of its relative position [61° of the locust’s frontal (or rear) visual field in treatment 3 (or 4) and 39° of the upper (or lower) visual field in treatment 5 (or 6)], L2 responses were most likely affected by the position relative to the stimulus rather than to the screen.
One inconsistent finding is the different L1 response distribution in treatment 5 of Experiment 1 (Fig. 3a) and treatment 2 in Experiment 2 (Fig. 3b), which were spatially matched. Aside from potential differences in the two distinct groups for each experiment, there may have been an effect of experience on behaviour. In each experiment, treatments were presented in a different randomized order for each locust pair. In Experiment 1, treatment 5 was the only pairing with a live conspecific, whereas in Experiment 2, L1 was paired with a live conspecific in each treatment. Thus, we cannot rule out experience as a variable that affects looming-evoked responses. While pilot studies suggest that this is not the case, further experiments are needed to test the role of experience.
Individual responses
The behaviours we observed for individual locusts here are expressed across many phylogenetically distinct groups and thus likely represent a common adaptive strategy when challenged with an approaching object. Active steering occurs in free flying moths (Manduca sexta), producing robust looming-evoked steering manoeuvres that drive them out of a plume when tracking a pheromone source (Verspui and Gray 2009) and Drosophila avoidance reflexes involve active generation of sideslip and roll manoeuvres when presented with a laterally expanding visual stimulus (Sugiura and Dickinson 2009). Startle responses occur in flying bush crickets presented with acoustic stimuli (Libersat and Hoy 1991) and mantids presented with images of predators (Edmunds and Brunner 1999). Well-described collision avoidance behaviour of crabs involves walking in the opposite direction of laterally looming stimuli (Oliva et al. 2007). Gliding and startle responses also constitute an escape mechanism in flying squirrels (Paskins et al. 2007), great blue tits (Kullberg et al. 1998; Lind et al. 2002) and looming-evoked behaviours occur in human infants (Ball and Tronick 1971).
The locust looming-evoked responses we describe here are consistent with those of previous behavioural studies (Robertson and Reye 1992; Robertson and Johnson 1993a, b; Gray et al. 2001; Santer et al. 2005a; Chan and Gabbiani 2013; McMillan et al. 2013) and similar to those described for evasive manoeuvers evoked by other stimulus modalities (Robertson et al. 1996; Dawson et al. 1997, 2004). While the most common behaviour of L1 when alone was either gliding or startle, the most common response of L2 when alone was active steering. Gliding or startle responses may reflect late detection, evoking a last ditch effort at collision avoidance (Robertson and Reye 1992; Gray et al. 2001; Santer et al. 2005a; Chan and Gabbiani 2013; McMillan et al. 2013), whereas active steering involves coordinated flight muscle and wing kinematics that result is 3D orientation of locusts either towards or away from an approaching object (Chan and Gabbiani 2013; McMillan et al. 2013). Thus, the distribution of behaviours we observed may reflect different behavioural states of individuals or aspects of sensory experience (see above).
Presence of a conspecific
In schooling fish (e.g. herring), solitary individuals display different, variable, escape trajectories compared to members of a group, which display relatively uniform escape trajectories (Domenici and Batty 1997). In locusts, changes in the translatory pattern of motion in lateral visual field simulate changes in flight speed (thrust) and flight direction [yaw, (Spork and Preiss 1993)]. Thus, the speed and direction of locust flight in a swarm results from the optomotor effectiveness of the pattern image formed by the neighbouring individuals and this feature contributes to a common orientation within a group.
While our data suggest that the presence of L2 did not affect the type of L1 behaviour (Fig. 3), analysis of motion within six degrees of freedom implies that the presence of a conspecific adjacent to a looming object’s trajectory affects subtle components of collision avoidance. When paired with a live conspecific, L1 generated significantly reduced sideslip and forward motion, whereas translational and rotation motion of L2 was relatively invariant. Changes in translational motion could have significant effects on behaviour since they are components of avoidance responses (Oliva et al. 2007; Sugiura and Dickinson 2009; McMillan et al. 2013).
Changes in rotational degrees of freedom are also associated with steering manoeuvres in locusts (Robertson and Johnson 1993a; McMillan et al. 2013) and Drosophila (Sugiura and Dickinson, 2009). In the present study locusts changed the direction of their flight in response to the looming object by generating yaw torques or roll torques or both, while pitch remained nearly constant. In free flying locusts, angular changes during yaw and roll movements are closely related and angle values change in parallel almost simultaneously (Berger and Kutsch 2003). However, in our experiments, these angular changes were neither consistent nor related. Significant changes in roll of L1 and yaw of both locusts (Fig. 5) imply that rotational degrees of freedom during collision avoidance can be affected by the presence of a conspecific. Contradictory patterns in the (reversed relative to the control direction) pooled roll and right rotation deviations of L1 are consistent with findings of Spork and Preiss (1993) and provide further evidence that locusts use visual cues from the looming object as well as from proximal conspecifics.
Position of a conspecific
While L1 response types were not affected by the position of a conspecific, L2 responses may have been affected by the position relative to the stimulus trajectory. For example, irrespective of position within the azimuthal plane (treatments 2, 3 and 4 in Experiment 2), L2 responded to the looming stimulus most frequently by active steering (Fig. 3b). These effects may reflect positional sensitivity of collision detection circuits within the locust visual system (Gabbiani et al. 2004; McMillan and Gray 2012) that have analogues in other systems, including flies (Krapp et al. 1998), frogs (Kang and Li 2010) and pigeons (Wylie and Frost 1999). The locust descending contralateral movement detector (DCMD) is a motion-sensitive visual interneuron that is highly responsive to looming stimuli and thought to be involved in fast escape behaviours (Simmons and Rind 1992; Gray et al. 2001). The DCMD maintains high sensitivity to looming stimuli across a broad region of the visual field (30˚ to 150˚ azimuth; −15˚ to 45˚ elevation (Rogers et al. 2010)) and is more sensitive to stimuli approaching from above (Rind and Simmons 1997; Rogers et al. 2010) and behind (Krapp and Gabbiani 2005; Guest and Gray 2006). However, DCMD directional sensitivity is inconsistent with a decrease in active steering in treatment 6 of Experiment 2 (stimulus above L2) and relative invariance of L2 translational motion. While it is possible that the most compelling DCMD stimulus evokes a more generalized looming response, experiments are needed to test the possibility that putative directional sensitivity of other motion-sensitive neurons (e.g. Gray et al. 2010) reflect positionally related behaviour.
For L1, a laterally looming object may be more compelling than non-looming motion of a conspecific located in different positions. The effects on L1 translational motion in the y-plane (Fig. 6) were consistent (reduced and reversed), irrespective of the relative position of L2, suggesting that locusts use visual cues from the looming objects as well as from flying neighbours interposed with the stimulus during collision avoidance. While the presence of L2 at different relative positions may have affected L1’s visual sensory perception, relative consistency in L1 response types across all treatments (Fig. 3b) suggests that L1 was affected more by the presence of a conspecific rather than its specific position.
Response onset and duration
The size of the retinal image subtended by an approaching object is an important stimulus parameter in triggering visually evoked avoidance responses (Robertson and Johnson 1993a; Kang and Li 2010; Nakagawa and Hongjian 2010). Specifically, looming-triggered behaviours often occur with a fixed delay after the stimulus reaches a fixed angular threshold size on the retina (Fotowat and Gabbiani 2007; Yamamoto et al. 2003; Fotowat et al. 2009) or are guided by changes in the retinal image size and used compute time to collision to adjust behaviour accordingly (Ellard 2004). Here, we show that L1 and L2 responded to the looming object at a median time of 0.84 s before collision, which translates into subtense angles of 1.4° for L1 and 1.6° for L2 and is consistent with recent findings using minimally restrained preparations (Chan and Gabbiani 2013; McMillan et al. 2013).
Temporal firing properties of looming-sensitive neurons (Gabbiani et al. 1999; Yamawaki and Toh 2009; Kang and Li 2010) and behavioural responses (Chan and Gabbiani 2013; McMillan et al. 2013) depend on a combination of the size and velocity of approaching objects. Accordingly, the stimulus we used may have affected the timing of L1 and L2 responses equally and independently (see also Spork and Preiss 1993). Given the relative position of each locust to the stimulus, it is reasonable to assume that L2 would respond earlier than L1. However, the normalized temporal responses (time of behavioural onset and response duration) were invariant to the presence and position of a conspecific. This is likely due to the relative proximity of the each locust to each other and to the stimulus. At 3 m s−1, the object would take 0.1 s to travel the distance between L1 and L2, which is within the range of response onset variability. Accordingly, our data agree with the subsequent expectation that response duration would also be similar for each locust of the pair.
Distance between pairs
Locust swarms can maintain continuous cohesion over distances of hundreds of kilometres lasting many days without significant dispersion (Baker et al. 1984; Spork and Preiss 1993) and are thus able to avoid predation and constant collisions with each another (Baker et al. 1981) by maintaining their position relative to their immediate neighbours (Kennedy 1951; Preiss 1992). Our data show that locust pairs maintained their distance during a looming-evoked response, except when L2 was in front of L1 (Fig. 7) and most often steered in the same direction. Similarly, schooling fish such as cod (Gadus morhua), saith (Pollachius virens) and herrings (Clupea harengus), have the ability to maintain distances between nearest neighbours within a set range (Parrish et al. 2002). Further, when an optomotor response is elicited simultaneously in two conspecific puffer fish, they exhibit cohesive movement while maintaining a fixed distance (Imada et al. 2010). Locusts can transfer directional information and rapidly change their flight direction appropriately (Baker et al. 1981; Farrow 1990) which may result from optomotor effectiveness of the image pattern formed by neighbouring individuals (Spork and Preiss 1993), eventually contributing to swarm cohesion. Consistent with visually guided cohesion, we found that in more than 50 % of trials locusts responded to the looming object by moving in the same direction (i.e. as a pair). Moreover, in treatments that showed the higher percentage of pairing behaviour, locusts were able to maintain the distance throughout collision avoidance. These findings further emphasize that regardless of the presence and/or different relative positions of a conspecific, locusts can maintain the distance from their neighbour.
While this study provides insights into collision avoidance behaviour in a locust pair, further experiments with a larger group size will extend these findings to more natural conditions. Nevertheless, results reported here will guide stimulus parameters used for physiological experiments designed to investigate neural and motor response to complex visual stimuli. Future investigations that incorporate behavioural, kinematic, sensory coding and sensorimotor integration will permit a deeper understanding of the neural mechanisms that underly coordinated and cohesive movement between individuals during the production of natural behaviour.
References
Baker PS, Gewecke M, Cooter RJ (1981) The natural flight of the migratory locust, Locusta migratoria L. III. Wing-beat frequency, flight speed and attitude. J Comp Physiol A 141:233–237
Baker PS, Gewecke M, Cooter RJ (1984) Flight orientation of swarming Locusta migratoria. Physiol Entomol 9:247–252
Ball D, Tronick E (1971) Infant responses to impending collision—optical and real. Science 171:818–820
Berger S, Kutsch W (2003) Turning manoeuvres in free-flying locusts: high-speed video-monitoring. J Exp Zool Part A Comp Exp Biol 299:127–138
Burrows M, Rowell CHF (1973) Connections between descending visual interneurons and metathoracic motoneurons in the locust. J Comp Physiol A 85:221–234
Cao P, Gu Y, Wang SR (2004) Visual neurons in the pigeon brain encode the acceleration of stimulus motion. J Neurosci 24:7690–7698
Chan RW, Gabbiani F (2013) Collision-avoidance behaviors of minimally restrained flying locusts to looming stimuli. J Exp Biol 216:641–655
Dawson JW, Dawson-Scully K, Robert D, Robertson RM (1997) Forewing asymmetries during auditory avoidance in flying locusts. J Exp Biol 200:2323–2335
Dawson JW, Kutsch W, Robertson RM (2004) Auditory-evoked evasive manoeuvres in free-flying locusts and moths. J Comp Physiol A 190:69–84
Dewell RB, Gabbiani F (2012) Escape behavior: linking neural computation to action. Curr Biol 22:R152–R153. doi:10.1016/j.cub.2012.01.034
Domenici P, Batty RS (1997) Escape behaviour of solitary herring (Clupea harengus) and comparisons with schooling individuals. Mar Biol 128:29–38
Edmunds M, Brunner D (1999) Ethology of defenses against predators. In: Prete FR, Wells H, Wells PH, Hurd LE (eds) The praying mantids. Johns Hopkins University Press, Baltimore, pp 276–302
Ellard CG (2004) Visually guided locomotion in the gerbil: a comparison of open- and closed-loop control. Behav Brain Res 149:41–48
Farrow RA (1990) Flight and migration in Acridoids. In: Chapman RF, Joern A (eds) Biology of grasshoppers. Wiley, New York, pp 227–314
Fotowat H, Gabbiani F (2007) Relationship between the phases of sensory and motor activity during a looming-evoked multistage escape behavior. J Neurosci 27:10047–10059
Fotowat H, Fayyazuddin A, Bellen HJ, Gabbiani F (2009) A novel neuronal pathway for visually guided escape in Drosophila melanogaster. J Neurophysiol 102:875–885
Gabbiani F, Krapp HG, Laurent G (1999) Computation of object approach by a wide-field motion-sensitive neuron. J Neurosci 19:1122–1141
Gabbiani F, Mo CH, Laurent G (2001) Invariance of angular threshold computation in a wide-field looming-sensitive neuron. J Neurosci 21:314–329
Gabbiani F, Krapp HG, Hatsopoulos NG et al (2004) Multiplication and stimulus invariance in a looming-sensitive neuron. J Physiol Paris 98:19–34
Gray JR (2005) Habituated visual neurons in locusts remain sensitive to novel looming objects. J Exp Biol 208:2515–2532
Gray JR, Lee JK, Robertson RM (2001) Activity of descending contralateral movement detector neurons and collision avoidance behaviour in response to head-on visual stimuli in locusts. J Comp Physiol A 187:115–129
Gray JR, Blincow E, Robertson R (2010) A pair of motion-sensitive neurons in the locust encode approaches of a looming object. J Comp Physiol A 196:927–938
Guest BB, Gray JR (2006) Responses of a looming-sensitive neuron to compound and paired object approaches. J Neurophysiol 95:1428–1441
Imada H, Hoki M, Suehiro Y, et al (2010) Coordinated and cohesive movement of two small conspecific fish induced by eliciting a simultaneous optomotor response. PLoS ONE. doi:10.1371/journal.pone.0011248
Judge SJ, Rind FC (1997) The locust DCMD, a movement-detecting neurone tightly tuned to collision trajectories. J Exp Biol 200:2209–2216
Kang H-J, Li X-H (2010) Response properties and receptive field organization of collision-sensitive neurons in the optic tectum of bullfrog, Rana catesbeiana. Neurosci Bull 26:304–316
Kennedy JS (1951) The migration of the desert locust (Schistocerca gregaria Forsk.). I. The behaviour of swarms II. A theory of long-range migrations. Phil Trans R Soc (Lond) B 235:163–290
Krapp HG, Gabbiani F (2005) Spatial distribution of inputs and local receptive field properties of a wide-field, looming sensitive neuron. J Neurophysiol 93:2240–2253
Krapp HG, Hengstenberg B, Hengstenberg R (1998) Dendritic structure and receptive-field organization of optic flow processing interneurons in the fly. J Neurophysiol 79:1902–1917
Kullberg C, Jakobsson S, Fransson T (1998) Predator-induced take-off strategy in great tits (Parus major). Proc R Soc B Biol Sci 265:1659–1664
Libersat F, Hoy RR (1991) Ultrasonic startle behavior in bushcrickets (Orthoptera; Tettigoniidae). J Comp Physiol A 169:507–514
Lind J, Kaby U, Jakobsson S (2002) Split-second escape decisions in blue tits (Parus caeruleus). Naturwissenschaften 89:420–423
Maier JX, Neuhoff JG, Logothetis NK, Ghazanfar AA (2004) Multisensory integration of looming signals by Rhesus monkeys. Neuron 43:177–181
McMillan GA, Gray JR (2012) A looming-sensitive pathway responds to changes in the trajectory of object motion. J Neurophysiol 108:1052–1068
McMillan GA, Loessin V, Gray JR (2013) Bilateral flight muscle activity predicts wing kinematics and 3-dimensional body orientation of locusts responding to looming objects. J Exp Biol 216:3369–3380
Nakagawa H, Hongjian K (2010) Collision-sensitive neurons in the optic tectum of the bullfrog, Rana catesbeiana. J Neurophysiol 104:2487–2499
Oliva D, Medan V, Tomsic D (2007) Escape behavior and neuronal responses to looming stimuli in the crab Chasmagnathus granulatus (Decapoda: Grapsidae). J Exp Biol 210:865–880
O’Shea M, Williams JLD (1974) The anatomy and output connections of a locust visual interneurone: the lobula giant movement detector (LGMD) neurone. J Comp Physiol 91:257–266
Parrish JK, Viscido SV, Grünbaum D (2002) Self-organized fish schools: an examination of emergent properties. Biol Bull 202:296–305
Paskins KE, Bowyer A, Megill WM, Scheibe JS (2007) Take-off and landing forces and the evolution of controlled gliding in northern flying squirrels Glaucomys sabrinus. J Exp Biol 210:1413–1423
Preiss R (1992) Set point of retinal velocity of ground images in the control of swarming flight of desert locusts. J Comp Physiol A 171:251–256
Preiss R, Spork P (1993) Flight-phase and visual-field related optomotor yaw responses in gregarious desert locusts during tethered flight. J Comp Physiol A 172:733–740
Preuss T, Osei-Bonsu PE, Weiss SA et al (2006) Neural representation of object approach in a decision-making motor circuit. J Neurosci 26:3454–3464
Rind FC, Simmons PJ (1997) Signaling of object approach by the DCMD neuron of the locust. J Neurophysiol 77:1029–1033
Robertson RM, Johnson AG (1993a) Collision avoidance of flying locusts: steering torques and behaviour. J Exp Biol 183:35–60
Robertson RM, Johnson AG (1993b) Retinal image size triggers obstacle avoidance in flying locusts. Naturwissenschaften 80:176–178
Robertson RM, Reye DN (1992) Wing movements associated with collision-avoidance manoeuvers during flight in the locust Locusta migratoria. J Exp Biol 163:231–258
Robertson RM, Kunhert CT, Dawson JW (1996) Thermal avoidance during flight in the locust Locusta migratoria. J Exp Biol 199:1383–1393
Rogers SM, Harston GWJ, Kilburn-Toppin F et al (2010) Spatiotemporal receptive field properties of a looming-sensitive neuron in solitarious and gregarious phases of the desert locust. J Neurophysiol 103:779–792
Santer RD, Simmons PJ, Rind FC (2005a) Gliding behaviour elicited by lateral looming stimuli in flying locusts. J Comp Physiol A 191:61–73
Santer RD, Yamawaki Y, Rind FC, Simmons PJ (2005b) Motor activity and trajectory control during escape jumping in the locust Locusta migratoria. J Comp Physiol A 191:965–975
Santer RD, Rind FC, Stafford R, Simmons PJ (2006) Role of an identified looming-sensitive neuron in triggering a flying locust’s escape. J Neurophysiol 95:3391–3400
Schiff W, Caviness JA, Gibson JJ (1962) Persistent fear responses in rhesus monkeys to the optical stimulus of “looming”. Science 136:982–983
Simmons PJ (1980) Connexions between a movement-detecting visual interneurone and flight motoneurones of a locust. J Exp Biol 86:87–97
Simmons PJ, Rind FC (1992) Orthopteran DCMD neuron: a reevaluation of responses to moving objects. II. Critical cues for detecting approaching objects. J Neurophysiol 68:1667–1682
Spork P, Preiss R (1993) Control of flight by means of lateral visual-stimuli in gregarious desert locusts, Schistocerca gregaria. Physiol Entomol 18:195–203
Straw AD (2008) Vision Egg: an open-source library for realtime visual stimulus generation. Front Neuroinform 4:12
Sugiura H, Dickinson MH (2009) The generation of forces and moments during visual-evoked steering maneuvers in flying Drosophila. PLoS ONE. doi:10.1371/journal.pone.0004883
Sun H, Frost BJ (1998) Computation of different optical variables of looming objects in pigeon nucleus rotundus neurons. Nat Neurosci 1:296–303
Uvarov BP (1977) Grasshoppers and locusts. In: A handbook of general acridology, vol 2. Behaviour, ecology, biogeography, population dynamics. Cambridge University Press, Cambridge and Centre for Overseas Pest Research, London
Verspui R, Gray JR (2009) Visual stimuli induced by self-motion and object-motion modify odour-guided flight of male moths (Manduca sexta L.). J Exp Biol 212:3272–3282
Wylie D, Frost BJ (1999) Responses of neurons in the nucleus of the basal optic root to translational and rotational flowfields. J Neurophysiol 81:267–276
Yamamoto K, Nakata M, Nakagawa H (2003) Input and output characteristics of collision avoidance behavior in the frog Rana catesbeiana. Brain Behav Evol 62:201–211
Yamawaki Y, Toh Y (2009) Responses of descending neurons to looming stimuli in the praying mantis Tenodera aridifolia. J Comp Physiol A 195:253–264
Acknowledgments
Funding provided by the Natural Sciences and Engineering Research Council of Canada, the Canada Foundation for Innovation, and the University of Saskatchewan.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
359_2014_916_MOESM1_ESM.pdf
Supplementary Figure 1 Two-dimensional motion tracks from Experiment 1 with the azimuthal (top panels) and elevation (bottom panels) planes of L1 (n = 19) and L2 (n = 19) separated into active steering (black lines) and non-steering (glide or startle, grey lines) behaviours. Data were aligned relative to the initial position at the start of the recording (x, y, z coordinates = 0,0,0) and represent motion tracks during the behavioural epoch. Inset in each graph plot shows the average motion vectors from all animals during the first 2 frames of the behavioural epoch. For all data positive (negative) deviations along the x, y and z axis represent movement to the right (left), up (down) or forward (back), respectively. The data show that active steering resulted in greater excursions in the x-plane compared to glides or startle responses and average vectors show more pronounced motion to the left (away from the stimulus). Nevertheless, glides and startle responses also resulted in excursions within the x-plane that were, on average for L2, to the left. For L1, irrespective of response type, and L2 non-steering behaviours, motion within the y-plane was maintained along the longitudinal midline (i.e. motion was primarily forward with little change in altitude). Active steering in L2 resulted in an average decrease in altitude. (PDF 68 kb)
359_2014_916_MOESM2_ESM.pdf
Supplementary Figure 2. Two-dimensional motion tracks from Experiment 2 within the azimuthal (top panels) and elevation (bottom panels) planes of L1 (n = 18) and L2 (n = 18) separated into active steering (black lines) and non-steering (glide or startle, grey lines) behaviours. Data were aligned relative to the initial position at the start of the recording (x, y, z coordinates = 0,0,0) and represent motion tracks during the behavioural epoch. Inset in each graph plot shows the average motion vectors from all animals during the first two frames of the behavioural epoch. For all data positive (negative) deviations along the x, y and z axis represent movement to the right (left), up (down) or forward (back), respectively. The data show similar trends as described in Supplementary Figure 1 except that the average motion vector for L1 in the azimuthal plane aligned with 0 in the x axis. (PDF 67 kb)
Rights and permissions
About this article

Cite this article
Benaragama, I., Gray, J.R. Responses of a pair of flying locusts to lateral looming visual stimuli. J Comp Physiol A 200, 723–738 (2014). https://doi.org/10.1007/s00359-014-0916-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00359-014-0916-0