
Abstract
We challenged tethered, flying locusts with visual stimuli looming from the side towards one eye in a way that mimics the approach of a predatory bird. Locusts respond to the lateral approach of a looming object with steering movements and a stereotyped, rapid behaviour in which the wingbeat pattern ceases and the wings are swept into a gliding posture. This gliding behaviour may cause the locust to dive. The gliding posture is maintained for 200 ms or more after which flight is resumed with an increased wingbeat frequency or else the wings are folded. A glide begins with a strong burst of activity in the mesothoracic second tergosternal motor neuron (no. 84) on both sides of the locust. Recordings of descending contralateral movement detector (DCMD) activity in a flying locust show that it responds to small (80-mm diameter) looming stimuli during tethered flight, with a prolonged burst of spikes that tracks stimulus approach and reaches peak instantaneous frequencies as, or after, stimulus motion ceases. There is a close match between the visual stimuli that elicit a gliding behaviour and those that are effective at exciting the DCMD neuron. Wing elevation into the gliding posture occurs during a maintained burst of high frequency DCMD spikes.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Avoiding collisions is crucial to the survival of flying insects. Flying locusts, for example, need to avoid colliding with vegetation and, when flying in swarms, with other locusts. They also need to avoid predators, such as birds, approaching rapidly from a variety of angles. Many insects have evolved elaborate evasive behaviours that are triggered by the stimuli that indicate a predator’s approach. Probably the best known examples are behaviours performed by nocturnal insects that are preyed upon by microchiropteran bats (for a review see Hoy et al. 1989). Insects such as moths (for a review see Roeder 1967), bushcrickets (Libersat and Hoy 1991; Schulze and Schul 2001), green lacewings (Miller 1975), locusts (Robert 1989; Dawson et al. 2004) and mantids (Yager and May 1990; Yager et al. 1990) all perform erratic evasive manoeuvres in flight upon detecting the ultrasonic sound pulses emitted by hunting bats. In some cases, for example in the bushcricket Neoconocephalus ensiger, these behaviours take the form of passive dives where the insect’s wings are held above its back for a brief period of several hundred milliseconds (Libersat and Hoy 1991). Following these behaviours, flight resumes normally but with an increased wingbeat frequency.
For predominantly diurnally flying insects like gregarious locusts (Symmons and Cressman 2001), predation is from a variety of bird species whose approach may not be easily detected by monitoring auditory stimuli. In the Niger River inundation area, Mali, the carmine bee-eater, Merops nubicus, is a specialist predator of the locusts Locusta migratoria and Schistocerca gregaria (Nickerson 1958; Fry and Fry 1992). Locusts are also taken on the wing by larger avian predators such as kestrels and kites (Smith and Popov 1953), and acridid species in general are predated by fast aerial predators such as the swallow, Hirundo rustica, and fiscal shrike, Lanius collaris humeralis (Cramp 1977). Birds like the carmine bee-eater capture locusts exclusively on the wing (Fry and Fry 1992). When they approach flying locusts, they will appear as looming stimuli—the bird’s silhouette will expand across the locust’s eye with its rate of expansion increasing as the time of contact nears (Wheatstone 1852; Gibson 1958).
In tethered flight, looming stimuli presented head-on to a locust have been shown to induce wing, leg, and abdomen movements that produce flight torques appropriate for steering behaviours (Robertson and Reye 1992; Robertson and Johnson 1993; Gray et al. 2001). These behaviours are thought to be triggered when the looming stimulus reaches a fixed angular subtense at the eye. Occasionally, when detected late during a loom, these stimuli resulted in gliding behaviours that were interpreted either as attempts at minimising the effect of a collision through absorbing its force or landing (Robertson and Reye, 1992), or as non-directional startle responses (Gray et al., 2001). Similar flight pausing behaviours have also been noted in freely flying and tethered locusts responding to ultrasonic sound pulses (e.g. Dawson et al. 2004).
Neurons that are able to detect looming stimuli have been identified and characterised in locusts. These include the descending contralateral movement detector (DCMD) neurons, which have axons that project from the protocerebrum to the thoracic ganglia (O’Shea et al. 1974). Although a DCMD responds briskly to sudden movements detected by the eye, it responds most vigorously to stimuli approaching the eye (Schlotterer 1977; Rind and Simmons 1992) and gives its maximum response when an object is on a direct collision course with the eye (Judge and Rind 1997). It may be most suited to detecting the approach of small targets such as predators or other locusts (Rind and Santer 2004). Each spike in a DCMD is driven by a spike in a large, fan-shaped neuron, the lobula giant movement detector (LGMD), in the lobula (O’Shea and Rowell 1975; Rind 1984). A DCMD excites motor neurons and interneurons that are involved in jumping and in flying (Burrows and Rowell 1973; Simmons 1980b; Pearson et al. 1985; Boyan 1989), suggesting that it could play a role in triggering urgent avoidance reactions. Spikes in a DCMD mediate relatively small excitatory postsynaptic potentials in ipsilateral wing depressor motor neurons, and consistently larger excitatory postsynaptic potentials in one wing elevator motor neuron, the forewing second tergosternal (motor neuron 84; Simmons 1980b). However, there is some doubt that a DCMD can elicit appropriate reactions in a flying locust, because small objects looming towards the front of a stationary locust consistently excite the DCMD strongly, but often fail to elicit collision avoidance steering manoeuvres in tethered, flying locusts (Gray et al. 2001).
In this paper, we describe the way that tethered, flying L. migratoria consistently respond to the sight of an object approaching from the side, by interrupting flight with a glide. During a glide, the wings are held in a stereotyped, elevated position. Some glides last for one or two wingbeat cycles, but others end when the locust folds its wings. Glides are characterised by a short burst of spikes in the left and right forewing second tergosternal motor neurons. We show that the DCMDs of tethered, flying locusts respond well to looming stimuli, and generate high frequencies of spikes at the time when a glide is initiated.
Materials and methods
We performed experiments on adult L. migratoria L. from our crowded colony, using males and females in approximately equal number. Experiments were performed under natural illumination from the laboratory window at an ambient room temperature of 26°C.
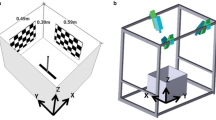
We challenged locusts with monocular visual stimuli. These were 80-mm diameter dark or light computer-generated circular disks that loomed towards the left eye of the locust, receded away from it, or expanded linearly along a trajectory perpendicular to the locust’s long axis. Stimuli were aligned so that the centre of the looming object approached directly towards the centre of the locust’s eye. Stimulus geometry was calculated by a computer program written in Borland Delphi and controlling a Cambridge Research Systems VSG2/3 image synthesiser and RG2 raster generator system in a microcomputer. Stimuli were displayed on a Kikusui COS1611 X-Y monitor using a green P31 phosphor, with a refresh rate of 200 Hz. The monitor screen was placed 70 mm from the locust’s eye and measured 100 mm horizontally by 80 mm vertically (subtense at the eye, of 71°×60°). The digital-to-analogue converter of the VSG2/3 provided a precise measurement of stimulus size at each screen update. All simulated looming stimuli approached over a distance of 2 m at a range of speeds from 0.5 to 10.0 m/s. At their final position level with the monitor screen, these subtended 60° at the locust’s eye.
Locusts were tethered via the dorsal pronotum. Although this site of tether attachment does not pass through the locust’s centre of gravity (Weis-Fogh 1956), we found in preliminary experiments that locusts tethered in this way responded in the same way to looming stimuli as locusts tethered onto a rod below the thorax. Flight was sustained using a simple wind tunnel powered by a DC ball-bearing fan (Papst TYP 4212 NH, RS components, UK) that was fixed at the end of a 15-cm long tube. The face of the tunnel measured 12.3×12.3 cm. To ensure that airflow was laminar, it flowed through a honeycomb structure of 5 cm lengths of drinking straws at the mouth of the wind tunnel. Air was directed at the front of the locust’s head, 12–15 cm from the face of the tunnel. The tunnel could produce wind speeds between 0.9 and 3.1 m/s, and we used a speed of 2.9 m/s in our experiments (measured using an LCA 6000 RVT airflow anemometer, Airflow Developments Ltd., High Wycombe). Before each experiment, locusts were allowed to fly for approximately 10 min to allow them to adopt a normal flight posture (see Results). Locusts then flew constantly during and between stimulus presentations for a period of greater than 30 min and up to 1 h. A 2.5-min interval separated consecutive stimulus presentations. We made high-speed video recordings of ten tethered, flying locusts from behind and four from their right side to 3 and 5 m/s looming stimuli. High-speed video recordings were made using a MotionScope PCI high-speed digital imaging system (Redlake MASD, USA) at 250 frames/s and were used in experiments where precise wing position measurements were important. Sufficient illumination to record wing position accurately was provided by illuminating a locust from above using a Schott FL1500 fibre optic lamp directed at the wings and abdomen. The locust’s eyes were shaded from direct illumination from this lamp. Each experimental trial recorded at high speed was saved as an .AVI file and viewed using the MotionScope PCI imaging software (Redlake MASD, USA). AVI files were analysed frame by frame by measuring, from the computer monitor screen, the angle of the fore- and hindwing leading edge relative to an imaginary vertical line running through the hinge of that wing. Abdomen position was measured as an X–Y co-ordinate in millimetres using the calibrated reticule of the MotionScope PCI imaging system program.
We also recorded the wing movements of six tethered, flying locusts using an infra-red wingbeat sensor, consisting of an infra-red emitter and a detector that responded when the locust’s right hindwing tip broke the IR beam, producing a compound waveform near the end of each down stroke. Although this method could not provide information on precise wing angles throughout a wing stroke, it provided a relatively easy means of measuring wingbeat durations during long periods of flight. We confirmed that it provided a reliable measure of wingbeat duration by making electromyograms from locusts while using the infra-red wingbeat monitor.
We made electromyogram recordings from six locusts in tethered flight during the presentation of looming stimuli as used above. In some trials, we synchronised these recordings with simultaneous high-speed video recordings made from behind the locust as before, using a voltage pulse produced by the stimulus display software. Electrodes were 50-μm steel wires, insulated except for their tips. A single electrode in the abdomen acted as a reference, and active electrodes were inserted through the cuticle of the ventral mesothorax at the site of attachment of a particular muscle. Electrodes were held in place with wax, and their position confirmed after an experiment by dissection.
In order to investigate DCMD responses during flight, we made extracellular recordings from the connectives of six locusts in tethered flight in response to 5 m/s looming stimuli. Simultaneously, we recorded each locust’s wing movements with the infra-red wingbeat sensor. Connective recordings were made with a pair of 150-μm silver wire hooks, separated by approximately 200 μm, and attached using epoxy resin. The electrodes were insulated with vinyl-wax mixture except for at the recording site and were connected to an electrode holder with 50-μm polyester insulated copper wires. To insert the hook electrodes, a locust was restrained ventral side up and a 1–1.5×2–2.5 mm window of cuticle was removed from the rostral mesothorax along the midline. Fat deposits were removed, exposing the right and left connectives. The hook electrodes were then introduced between the two nerve cords and manipulated around the right ventral nerve cord. We secured the base of the electrode to the left of the removed window of cuticle using a molten paraffin-beeswax mixture and replaced the removed segment of cuticle over the open window. This area was sealed with wax and the trailing copper wires were attached to the left side of the locust’s pronotum. We then turned the locust’s dorsal side up and attached it to a pronotal tether as for behavioural recordings.
Electrophysiological recordings were recorded to disc using Spike2v5 (Cambridge Electronic Design). Often, muscle potentials were recorded by the extracellular electrodes. To enhance the faster-rising DCMD spikes, we made recordings of these in each locust while it was not flying, created power spectra for these spikes, and then used a high-pass filter to reduce the amplitudes of the muscle potentials.
Unless otherwise stated, we plot means of measurements and indicate variability with standard errors of the mean.
Results
Occurrence and video analysis of loom-elicited gliding
Flight posture and wingbeat pattern were similar to previous reports whilst wingbeat frequency was slightly lower than that observed in free flight (Jensen 1956; Baker and Cooter 1979a; Baker et al. 1981). Locusts flew with their prothoracic legs raised and adducted into the pronotum, their mesothoracic legs trailed down the sides of the thorax, and their metathoracic legs bent at the femur-tibia joint and tucked below the abdomen and caudal thorax (Fig. 1a, b). Wingbeat frequency was 16.9±0.3 Hz (ten locusts, 32 trials in total). Inspection of video recordings showed that the wing tips traced a figure of eight and the hindwings led the forewings by about 8 ms.

Single frames from 250 frames/s video of locusts in tethered flight and during a glide evoked by a looming stimulus. a Typical flight posture adopted by tethered locusts viewed from the side. In the background is the monitor screen we used to deliver looming stimuli, captured halfway through a screen refresh. Arrow indicates foreleg tucked against the pronotum; b flying locust viewed from behind; in the background is the wind tunnel; c view from the right of the gliding posture evoked by a 3-m/s looming stimulus delivered to the left eye. Detail of the head and front of the thorax is relatively poor because light levels were low to enable the locust to see the stimuli on the monitor screen. However, the relatively light front leg can clearly be seen to be tucked against the pronotum (arrow). On the monitor screen is the fully expanded disk. The camera captured the monitor screen half-way through a screen refresh. d The gliding posture viewed from behind. Illumination was less than in Fig. 1b because of the fully expanded disk on the monitor screen.
Locusts responded to visual stimuli looming from the side with a variety of movements. For simulated objects approaching at 3 m/s or faster, the most consistent reaction was to raise the wings into what we refer to as a ‘gliding posture’ (Fig. 1c, d), similar to that described by Baker and Cooter (1979b) and Robertson and Reye (1992). In free flight, some locusts adopting this posture dived quite steeply losing height within the first 12.5 ms of the glide (Baker and Cooter 1979b). During video recording, locusts responded to at least 70% of simulated looms at these speeds with a glide, and this is the reaction that we concentrate on in this paper.
We recorded the frequency of occurrence of glides in response to computer-generated stimuli looming at approach speeds of between 0.5 and 10.0 m/s. In order to simplify data collection, we used the infra-red wingbeat sensor rather than the video system to do this, and we defined a glide as a pause between consecutive wingbeats that lasted for more than 1.25 times the mean wingbeat duration of the preceding 10 wingbeat cycles. A duration of 0.25 times the mean wingbeat is greater than the standard deviation of wingbeat duration, so that this criterion allowed us to distinguish full glides from normal variation in wingbeat duration. Frequency of glide occurrence increased as stimulus speed increased (Fig. 2). It reached a plateau at loom speeds of 3 m/s and above, where, as in the video recording experiments, gliding was elicited in 70–80% of trials.

The occurrence of gliding behaviour in response to looming stimuli. Data points are the mean frequency of occurrence and standard error of gliding behaviours in ten presentations of each loom speed to each of six individual locusts.
Gliding was normally elicited during the final 50 ms of a 3 m/s looming stimulus but could occur during the last 200 ms. Gliding typically involved a symmetrical elevation of the fore- and hindwings as occurs during the normal flight cycle (Fig. 3). In fewer than half the glides, the amplitude of the wingbeat preceding a glide was reduced for one or more wings (asterisk in Fig. 3b). Upon elevation, the normal wingbeat pattern ceased, and the wings were held in a stationary swept-back position above the locust’s back (Figs. 1c, 3a). From 10 locusts, measurements were made for a total of 54 glides initiated by 3 and 5 m/s looming stimuli. Viewed from behind, the right and left forewings were held at 34.2±1.2° and 34.2±1.1° relative to vertical, respectively (Fig. 3b), and the right and left hindwings were held at 39.5±2.4° and 39.3±2.1°, respectively (Fig. 3c). Viewed from the right side, the forewing and hindwing were held at 34.4±0.8° and 65.9±3.3° relative to vertical, respectively. Manual examination revealed the wings to click naturally into a folded position but not into the gliding posture. Early in a glide, all legs remained in the normal flight posture (Figs. 1a; 3a, ii), but then the metathoracic legs were moved outwards (Fig. 3a, iii) while remaining bent at the femur–tibia joint. Occasionally, a locust extended both its hind legs into the path of the hindwings about 30 ms after the expected time of collision (Fig. 3a, iv). In trials where no glide occurred, locusts sometimes extended only their right hind leg into the path of the right hindwing.

Measurements from high-speed video recordings of a glide evoked by a 3 m/s looming stimulus. a Frames of key events: i at 248 ms after the start of stimulus movement, the locust remained in its characteristic flight posture but developed asymmetry between its left and right wings, ii at 680 ms, the gliding posture was adopted, but the legs remained in the normal flight posture, iii at 796 ms, the hind legs were moved laterally while remaining folded (arrows), iv at 820 ms, the hind legs were unfolded and moved into the path of the right and left hindwings. b, c Fore- and hindwing angles throughout a looming stimulus. The gliding posture was adopted 23 ms prior to the time of collision, which is indicated by the vertical grey line. Asterisks in b indicate two wingbeats in which the left forewing was depressed less than normal prior to glide initiation. d Angular asymmetry between the left and right fore- and hindwings, calculated by adding the angle of the left wing (a negative value) to that of the right wing (a positive value). Asymmetry was most pronounced during wing depression (larger angles) and was greatest for the forewings. e Position of the abdomen’s tip relative to its initial position prior to stimulus delivery. In this trial, the abdomen had been raised and moved to the right at the approximate time of collision. f The angular subtense at the locust’s eye of an 80-mm diameter black disk looming towards the locust.
In the early stages of a loom, and often for approaches slower than 3 m/s, left and right wings beat asymmetrically, particularly the forewings (Fig. 3b–d). Usually, the right forewing depressed more strongly than the left as collision became imminent (Fig. 3d). Such asymmetries have been interpreted as attempts to steer to the right—away from the looming stimulus (Robertson and Reye 1992; Robertson and Johnson 1993; Gray et al. 2001). Close to collision, the abdomen was often raised and moved to the right (Fig. 3e), also consistent with an attempt to steer to the right. We did not observe steering movements by the legs prior to collision. Asymmetry in wing movements and movements of the abdomen were also observed in responses to looming stimuli that did not elicit glides. Sometimes, when a locust did not glide, forewing elevation was slightly prolonged at the approximate time of collision. As the usual wingbeat cycle lasted approximately 50 ms and was composed of elevation and depression of approximately 25 ms each, the forewing could be elevated for around 5 ms. A prolonged elevation of this wing could last, at most, an additional 5 ms, resulting in wing elevation well below the minimum criterion for glide classification of 1.25 times the mean wingbeat duration of the preceding 10 wingbeat cycles.
We examined high-speed videos of gliding in response to 3 and 5 m/s looming stimuli to measure the time of glide onset relative to the time at which collision would have occurred (Fig. 4). The median time of glide onset in response to 3 m/s approaching stimuli was 15 ms before collision (31 glides, range 235 ms before to 33 ms after collision; Fig. 4), and the median time of glide onset in response to 5 m/s approaching stimuli was 14 ms after collision (30 glides, range 82 ms before collision to 70 ms after collision; Fig. 4). Baker and Cooter (1979b) filmed glides by L. migratoria during free flights in their natural habitat. During these glides, locusts adopted a posture similar to the one we describe here, with the forewings held at 25–75° relative to vertical viewed from the front and 70–90° relative to vertical viewed from the side. At a natural flight speed of 4.0 m/s (Baker et al. 1981), locusts adopting a gliding posture lose height at approximately 2.3 m/s (Baker and Cooter 1979b). However, a flying locust must undergo a transition from flapping to gliding flight before height loss can occur. Because lift forces can be negative during wing elevation (Cloupeau et al. 1979), this transition may occur prior to our measure of glide timing. This would mean that during the 15 ms between the start of a glide and collision with an object approaching at 3 m/s, a locust could lose 34.5 mm in height.

The timing of the onset of gliding behaviours evoked by 3 and 5 m/s looming stimuli relative to the time of collision (horizontal grey line, 0 ms). Glide timing was defined as the moment the forewings became stationary in the gliding posture and was measured from high-speed films (see inset which shows the left and right forewing angles, measured from behind, during presentation of a 3 m/s looming stimulus. Data are from Fig. 3). Boxes show the 25th and 75th percentiles and bisecting lines indicate the median value. Whiskers indicate the 5th and 95th percentiles and outliers are plotted. Data are from more than 30 glides from a total of ten locusts produced in response to each stimulus.
The duration of glides was quite variable. In ten locusts that consistently resumed flight following a glide, glide duration elicited by stimuli looming at 3 m/s was 44–264 ms (mean, 137.1±14.84 ms from 18 glides). Flight resumed with the fore- and hindwings being first rotated forwards into their normal elevated positions followed by a normal depression. Some locusts folded their wings at the end of a glide rather than resuming flight.
Muscle activity and loom-elicited gliding
Electromyogram (EMG) recordings showed that glides always began with a strong burst of potentials in part of the mesothoracic tergosternal muscle (Fig. 5). The complete tergosternal muscle is composed of the first and second tergosternal muscles which cause wing elevation (Snodgrass 1929). These receive inputs from motor neuron 83 anteriorly and motor neuron 84 posteriorly, and excitation of each motor neuron causes contractions in only part of the muscle (Simmons 1980b). EMGs from this muscle usually show two amplitudes of spike, with the larger spike just preceding the smaller. The smaller spike is relatively larger in EMGs made from the posterior part of the muscle than from the anterior part (Fig. 5a), which leads us to conclude that the larger spike is from motor neuron 83 and the smaller from motor neuron 84. Video recordings made simultaneously with EMGs show that, during steady flight, muscle 83/84 was activated when the wing was fully depressed, and muscle 97 (first basalar, a depressor) was activated when the wing was fully elevated (Fig. 5b). At the start of a glide, motor neuron 84 spiked at the normal time during a wingbeat cycle, but instead of a single spike or pair of spikes, a series of spikes occurred. Up to eight spikes occurred at an instantaneous frequency up to 97 Hz, in the left and the right motor neurons 84 (Fig. 5c). We never recorded premature activation in elevator muscles in response to a looming stimulus. The usual pattern of activity in depressor and elevator muscles ceased until the end of a glide (Fig. 5b, c).

Flight motor neuron activity during looming-elicited glides. a EMGs from two different locations in the right tergosternal muscle during presentation of a stimulus approaching the left eye of a tethered flying locust at 5 m/s. The electrode in the top trace was placed anteriorly in the muscle, and the electrode in the middle trace was placed more posteriorly. The larger spikes are from motor neuron 83, and the smaller from motor neuron 84 (arrowed). b Flight muscle EMGs with simultaneous high-speed video recording of flight during the production of a glide elicited by a 3-m/s loom. Recordings are from the right forewing tergosternal and first basalar muscles. Lines indicate the single frames from the video that correspond with particular times in the EMGs. c Potentials in left and right forewing tergosternal muscles during an approach at 3 m/s. In all plots, a vertical grey line indicates the calculated time of collision.
We used the infra-red wingbeat monitor to record wingbeat frequencies before and after a glide. Flight often resumed with a phase different from that predicted by the flight rhythm preceding the glide (Fig. 6a). We also found that the mean instantaneous wingbeat frequency often declined during a loom and was raised and variable following a glide (Fig. 6b).

Wingbeat timing and frequency during glides elicited by stimuli approaching at 5 m/s. a A typical glide (double-headed arrow) captured using an infra-red sensor array that recorded the downstrokes of the hindwing as negative peaks. The bottom trace shows the image subtense, with the time at which collision would have occurred indicated by the vertical line (asterisk). Wingbeat pattern is indicated by a dot marking the time of each negative peak in the infra-red sensor trace. The lower line of dots indicate the expected time of wingbeats that would have occurred if the locust had not reacted to the stimulus. b Mean instantaneous wingbeat frequencies before and after a glide, which occurred at wingbeat zero. A total of 30 wingbeats before and 30 after this time are shown. Arrow indicates the onset of stimulus movement. As stimulus movement began, wingbeat frequency dropped until a glide occurred. Following the glide, flight resumed with an increased and erratic wingbeat frequency. Data are from six different locusts, with 44 examples of gliding recorded altogether.
DCMD activity and glide initiation in flying locusts
We found that the types of stimuli that elicit glides were the same as the types of stimuli that are most effective at exciting the DCMD (Rind and Simmons 1992; Simmons and Rind 1992). The DCMD responds to looming objects with a train of spikes that increase in frequency as the time to collision decreases, but produces only a short and transient burst of spikes to a receding object (Simmons and Rind 1997). The amplitude of this response increases with the approach speed of a looming object up to an approach speed of 10 m/s (Rind and Simmons 1992). Previous studies have also shown that the DCMD responds best to dark objects looming on a light background and less well to light objects looming on a dark background (Simmons and Rind 1997). The DCMD adapts very rapidly to images with edges expanding at a constant linear rate rather than looming, and never produces a burst of spikes that increase in frequency during the growth of such a stimulus (Simmons and Rind 1992).
Locusts performed glides in response to looming stimuli but not to receding stimuli (Fig. 7a, i). Both light and dark looming stimuli elicited glides, but dark looming objects elicited glides more reliably than light looming objects (Fig. 7a, i). Faster looming stimuli were more effective at eliciting glides than slower ones, up to a loom speed of approximately 5 m/s. At loom speeds of above 5 m/s, the frequency of occurrence of gliding behaviours did not increase further with increased loom speed (Fig. 7a, i). Stimuli in which edges moved to expand at a constant rate, rather than with increasing speed as is the case for a looming object, did not reliably elicit glides (Fig. 7a, ii). We also found that stimuli in which areas of the screen became darker, with no edge movement, failed to elicit glides.

Glide initiation and DCMD activity. a The stimuli that optimally elicit glides match those that optimally excite the DCMD neuron. Plotted are the mean frequencies of gliding occurrence in response to a range of types of looming stimuli (i) or to stimuli that grew with a constant linear rate of edge expansion (ii). Glides were defined as pauses in the flight rhythm, which lasted for more than 1.25 times the mean wingbeat duration of the preceding ten wingbeats. Data are from three presentations of each stimulus to each of ten locusts. b Nerve-cord recording showing DCMD spikes in response to stimuli approaching a tethered, flying locust at 5 m/s. Top trace: asterisks indicate the time of maximum depression during each wingbeat, which was recorded with the infra-red sensor as in Fig. 6a, second trace: angular subtense at the eye of the approaching stimulus, third trace: instantaneous spike frequency of the DCMD, bottom trace: nerve-cord recording. This locust did not resume flying after the glide, although the full glide posture was adopted as indicated by the labelled arrow. c The mean DCMD spike rate recorded from 32 trials from a total of six flying locusts during the performance of gliding behaviours in response to a 5-m/s looming stimulus. Dots at the top of the plot indicate the start of wing elevation into the gliding posture for each example of the behaviour. DCMD data are divided into 10-ms bins and are plotted as mean + SEM. Angular size of the looming object is given in the lower trace, and a vertical dotted line indicates the calculated time of collision. The DCMD spike rate increased with stimulus expansion and reached a sustained burst of high-frequency spikes, during which wing movement into the gliding posture began. d The mean DCMD spike number in a single tethered, flying locust elicited by looming (5 m/s), receding (5 m/s) and linearly expanding (143°/s) visual stimuli. Looming stimuli reliably elicited glides and a strong DCMD response. Receding and linearly expanding objects did not elicit glides and caused a relatively weaker DCMD response. Bars indicate SEM and data are from five presentations of receding and expanding stimuli and 24 presentations of looming stimuli to the same locust.
We used implanted hook electrodes to record responses by the DCMD in tethered, flying locusts to approaching visual stimuli (Fig. 7b). Records from identified visual neurons during flight have not been published before. Locusts with these electrodes implanted flew well although with a slightly reduced wingbeat frequency (mean for six locusts, 14.9±0.8 Hz). Also, the frequency with which glides were elicited by approaching stimuli was lower than that for locusts without these electrodes (for an approach speed of 5 m/s, frequency of gliding was 0.3±0.1, from 95 trials in six locusts, whereas frequency of gliding was 0.7±0.1 from 60 trials in ten locusts with no electrodes implanted). During flight, the DCMD responded vigorously to approaching stimuli. DCMD spike frequency increased up to the end of stimulus movement and continued at over 200 Hz while gliding was initiated (Fig. 7c). Wing elevation into the gliding posture occurred during this maintained burst of high frequency DCMD spikes (Fig. 7c). Figure 7d shows the results of an experiment in a tethered, flying locust in which we recorded DCMD responses to a variety of stimulus types. We analysed responses to looming, receding, and linearly expanding stimuli and found that looming stimuli elicited a large number of spikes in the DCMD, whilst receding and linearly expanding stimuli elicited a very much weaker response. Thus, the strength of the DCMD response, in terms of spike number, correlated with the occurrence of gliding behaviours and matched previous observations of the DCMD neuron’s response (e.g. Simmons and Rind 1992; Simmons and Rind 1997).
Discussion
The gliding behaviour we describe here is a ‘last chance’ evasive response to avoid collision or being caught by an aerial predator. In free flight, we predict that it would lead to a steep dive and would be the last of a series of actions by locusts to avoid collision. A glide would normally only be evoked when other steering manoeuvres had failed to take the locust away from a collision course. It is elicited by the same types of stimuli that excite the DCMD neuron, and is accompanied by vigorous, accelerating bursts of spikes in the DCMD, which reach their highest instantaneous frequencies during wing elevation into the gliding posture.
The gliding behaviour
When a glide is produced, the wings are elevated and held in a swept back dihedral position above the body until flapping flight resumes. Left and right motor neurons 84 produce bursts of spikes, which cause the posterior parts of the forewing tergosternal muscles to contract, holding the forewings above the hindwings. Normally during flight, these motor neurons produce just 1 spike per wingbeat. The posture adopted during a glide is remarkably stereotyped, suggesting that the glide has a definite behavioural role, rather than being a non-specific breakdown in the flight pattern under experimental conditions. Gliding behaviours have been noted previously in response to the late detection of faster approaching binocular looming stimuli and, due to the foreleg extension which occurred as part of the behaviour, were interpreted as attempts to land or absorb the impending head-on impact (Robertson and Reye 1992). However, binocular, head-on looms may mimic a locust approaching a static object whilst lateral looms mimic an object, such as a predator, approaching a locust. In response to lateral looms, we noted no leg movements and, therefore, interpret the glide as a passive dive. This interpretation is supported by data on free-flying locusts, which suggest that they can lose height whilst in the gliding posture (Baker and Cooter 1979b), and by descriptions of passive diving in bushcrickets where similar wing positions to those that we report are adopted (Libersat and Hoy 1991).
Before a glide, and in trials where looming stimuli did not trigger glides, locusts often made steering movements that included asymmetrical movements of the left and right wings and deflections of the abdomen. In free flight, such movements would steer the locust away from the looming object, and they have also been noted in response to head-on looming stimuli (Robertson and Reye 1992; Robertson and Johnson 1993; Gray et al. 2001). The glide is, therefore, part of a suite of avoidance responses triggered by a looming stimulus. In a similar way, Roeder (1962; 1967), in his classical description of evasive manoeuvres made by noctuid moths in response to bat cries, described how a relatively weak sound pulse would evoke turns, but a loud pulse would cause a moth to dive. Subsequently, similar behavioural repertoires have been noted in response to ultrasound in a number of other insect species (e.g. Hoy et al. 1989; Yager and May 1990; Yager et al. 1990; Schulze and Schul 2001; Dawson et al. 2004).
Mean wingbeat frequency tends to drop slightly during a stimulus approach, and this could start to decrease flight altitude. Although the effects of wingbeat frequency alterations are difficult to assess without a full aerodynamic analysis, they may contribute to complicated steering manoeuvres that alter the locust’s flight attitude to prepare it for a glide. When flight resumes, the shift in wingbeat phase relative to that of the wingbeats before the glide suggests that the flight rhythm generator might be interrupted or slowed during a glide. Mean wingbeat frequency also tends to be slightly elevated for a brief time as flight resumes following a glide. An increase in wingbeat frequency also occurs in the bushcricket N. ensiger when flight resumes following a passive dive (Libersat and Hoy 1991), and it may be that these wingbeat frequency alterations contribute to regaining stability or increasing flight speed following the glide.
Glide duration was variable in our experiments, and some locusts folded their wings after a glide rather than resuming flight. Under natural conditions, flight resumption may be quicker and more likely to occur than during our experiments because in free flight, diving during a glide will increase air flow over the head, and will excite some wing depressor motor neurons by decreasing illumination of the median ocellus (Simmons 1980a). With the wings already elevated, flight after a glide resumes with depressor muscle contractions rather than with elevator muscle contractions like those that occur when tarsal contact with the ground is initially lost in locusts beginning flight (Pond 1972).
The consequences of a looming-elicited glide
The locust’s gliding posture is similar to that adopted by other gliding species such as birds and flying fish. It is aerodynamically stable because the centre of lift is above the centre of gravity, as for a parachutist hanging below a parachute (Thomas and Taylor 2001). The dihedral wing positions during a glide should oppose involuntary roll movements that might de-stabilise the gliding locust (Thomas and Taylor 2001), and hind leg extension as flight resumes may help to provide drag-based stability, rather like the tail of a kite. A stable gliding posture may place the locust in an appropriate attitude to continue its escape rapidly as flight resumes.
It is difficult to extrapolate from our experiments, in which the locust is tethered and a looming object maintains a steady trajectory for collision with the eye, to the behavioural consequences of a glide during the final stages of a loom. Usually, steering responses (Robertson and Reye 1992; Robertson and Johnson 1993; Gray et al. 2001) and decreasing wingbeat frequency will have started to move the locust’s flight path away from interception by a predatory bird. A locust produces negative lift during some phases of a normal upstroke (Cloupeau et al. 1979), and this may be emphasised during wing elevation into the gliding posture. The most detailed description of gliding in free-flying locusts is by Baker and Cooter (1979b) who show that locusts sometimes dive at 2.3 m/s and lose height within the first 12.5 ms of a glide. Although these glides were not elicited by looming stimuli, they may help in estimating a glide’s aerodynamic consequences. Our data show that, for 80-mm diameter stimuli approaching at 3 m/s, the median timing at which the full glide posture was adopted was 15 ms prior to collision. If we assume that decreasing wingbeat frequency prior to a glide, and negative lift during wing elevation, prepares the locust to lose height, it may be able to descend as the glide posture is adopted because the transition from flapping to gliding flight may occur before the full posture is adopted. Although a locust would lose only 3.5 cm in height during this 15 ms (data from Baker and Cooter 1979b), the gliding response may be effective in avoiding capture by a predatory bird’s beak, if not collision with the bird itself. Furthermore, we propose that the glide is a last chance evasive behaviour. When steering movements have failed in removing the locust from collision with a predator, a glide resulting in height loss may be the only viable means of escape in the final milliseconds prior to interception. In this study, we noted that approximately 40% of the glides elicited by a 3 m/s, 80-mm diameter looming stimulus could result in sufficient height loss to avoid it. Although this calculation does not indicate the effectiveness of the gliding behaviour in the avoidance of real predators, it does compare well to studies of predator–prey interactions where these data are available. Under controlled experimental conditions, cockroaches were able to escape from 55% of the tongue strikes of predatory toads (Camhi et al. 1978). Similarly, 45% of juvenile crayfish were found to effectively escape the attacks of dragonfly nymphs using their tail flip escape response (Herberholz et al. 2004) and 55% of crickets were able to escape the attacks of wolf spiders (Casas 2004). It remains to be seen what degree of successful evasion a locust’s glide can confer, although we would not expect a high degree of successful evasion by gliding alone. In conjunction with other behaviours (such as steering), the glide may be a useful last chance escape strategy when all else has failed.
In the wild, gregarious locusts are predated in swarms by birds (Smith and Popov 1953; Hudleston 1958; Nickerson 1958; Fry and Fry 1992). Therefore, gregarious locusts are vulnerable to predation by diurnal avian predators and can use vision to detect and evade them. If the function of the glide is to avoid predation, we should relate our experimental stimuli to the natural looming stimuli faced by flying locusts. Carmine bee-eaters (M. nubicus), are specialist predators of the locusts L. migratoria and S. gregaria (Nickerson 1958; Fry and Fry 1992). They are fast and agile fliers that pursue locusts on the wing after swooping from a vantage point such as a telegraph pole. Carmine bee-eaters glide in pursuit of flying locusts with outstretched wings (Fry and Fry 1992), and thus their looming silhouette should approximately match their pectoral width. The looming stimuli used in this study are slightly larger than the pectoral width of carmine bee-eaters—measurements from museum specimens showed that these birds had a pectoral width of approximately 46 mm (R. McGowan, personal communication), whilst measurements from zoo specimens gave a mean pectoral width of 29.8±0.8 mm (mean±SEM, n=6; J. Curton, personal communication). However, larger bird species such as kestrels and kites are also known to take locusts on the wing (Smith and Popov 1953), and therefore we consider our stimulus to represent a range of natural predators.
Although the gliding behaviour appears suited to the evasion of a predatory bird, field observations will be required in order to see under what circumstances the behaviour is produced and how successful it is for predator evasion. Ultrasound-triggered evasive behaviours have been reported in free-flying locusts, and occasionally these take the form of a dive (Dawson et al. 2004). Reactions to ultrasound were observed more frequently in tethered than in free-flying locusts (Dawson et al. 2004), perhaps because, as in our experiments, early steering movements are ineffective at removing a locust from a source of danger. The ultrasound-evoked pauses in flight noted by Dawson et al. (2004) are likely to be similar to or the same as the glides that we report, indicating a common evasive strategy in response to a range of threatening stimuli. The latency between an auditory stimulus and the start of a dive is 45 ms in bushcrickets (Libersat and Hoy 1991), and it would be interesting to relate the timing of the bat-cry evoked glides to the proximity of bats to locusts.
The suitability of the DCMD neuron for the initiation of gliding behaviour
The types of stimuli that elicit gliding are the same types that excite the DCMD. In particular, gliding and DCMD responses are elicited both by dark objects expanding against a light background and by light objects expanding against a dark background, which makes it more likely that the LGMD and DCMD are responsible for triggering gliding rather than other looming-sensitive neurons such as the LGMD2 (Simmons and Rind 1997).
It is known that the DCMD evokes postsynaptic potentials in motor neuron 84 that are consistently larger than those evoked in other motor neurons (Simmons 1980b). We have found that a burst of spikes in motor neuron 84 is a consistent feature of the looming-elicited glide. The DCMD is, therefore, suitable for triggering a glide both because it responds appropriately to looming stimuli and because it excites a motor neuron of a muscle that is significant in causing a glide. The tergosternal muscle, however, may not be the only muscle involved in evasive reactions to looming stimuli. It is quite possible that some of the small muscles at the wing base, such as the pleuroaxilliary muscles (Pfau 1977), are responsible for holding the wings in the glide posture. In addition, the relatively weak excitation by the DCMD of some wing depressor motor neurons (Simmons 1980b), and flight interneurons (Pearson et al. 1985; Boyan 1989) might be responsible for some of the steering movements produced in response to looming stimuli prior to a glide. However, some features of the gliding behaviour cannot be explained by the known neuronal circuitry. For example, the DCMD connects only with the motor neuron 84 that is ipsilateral to its axon (Simmons 1980b) although motor neurons on both sides are involved in a glide; and we do not know what the mechanisms are for slowing the wingbeat rhythm before a glide. Our recordings of DCMD activity show that it responds in the same way to small (80-mm diameter) looming stimuli in tethered, flying locusts as it does in restrained preparations, producing a burst of spikes which increase in frequency as the stimulus object expands (e.g. Schlotterer 1977; Rind and Simmons 1992; Gabbiani et al. 1999). Wing movements into the gliding posture begin during the most vigorous part of the DCMD’s response. The long burst of high frequency spikes that we find the DCMD of a flying locust makes in response to approaching objects may ensure that the glide starts during a normal wing elevation, perhaps by allowing the spikes to elicit contractions in the tergosternal muscle only during a normal elevator burst via a process of flight gating (Reichert and Rowell 1985; Reichert and Rowell 1986). This would avoid damage resulting from premature activation of motor neuron 84. Because it is feasible to record spikes from the DCMD in tethered, flying locusts, we are now using this preparation to examine the types of signal an identified neuron must make in order to trigger a particular behaviour pattern.
Abbreviations
- DCMD:
-
Descending contralateral movement detector
- EMG:
-
Electromyogram
- IR:
-
Infra-red
- LGMD:
-
Lobula giant movement detector
- MN:
-
Motor neuron
References
Baker PS, Cooter RJ (1979a) The natural flight of the migratory locust, Locusta migratoria L. I. Wing movements. J Comp Physiol A 131:79–87
Baker PS, Cooter RJ (1979b) The natural flight of the migratory locust, Locusta migratoria L. II. Gliding. J Comp Physiol A 131:89–94
Baker PS, Gewecke M, Cooter RJ (1981) The natural flight of the migratory locust, Locusta migratoria L. III. Wing-beat frequency, flight speed and attitude. J Comp Physiol A 141:233–237
Boyan GS (1989) Synaptic input converging onto an identified premotor interneuron in the locust is gated according to modality. Naturwissenschaften 76:431–433
Burrows M, Rowell CHF (1973) Connections between descending visual interneurons and metathoracic motoneurons in the locust. J Comp Physiol A 85:221–234
Camhi JM, Tom W, Volman S (1978) The escape behaviour of the cockroach Periplaneta americana II. Detection of natural predators by air displacement. J Comp Physiol A 128:203–212
Casas J (2004) Air flow sensing: from physical ecology in the field to nanotech implementation. Presented at the 7th congress of the International Society for Neuroethology, Denmark. Neuromorphic Approaches to Neuroethology Abstract SY38
Cloupeau M, Devillers JF, Devezeaux D (1979) Direct measurements of instantaneous lift in desert locust; comparison with Jensen’s experiments on detached wings. J Exp Biol 80:1–15
Cramp S (1977) Handbook of the Birds of Europe, the Middle East and North Africa. The birds of the Western Paleartic. Oxford University Press, New York
Dawson JW, Kutsch W, Robertson RM (2004) Auditory-evoked evasive manoeuvres in free-flying locusts and moths. J Comp Physiol A 190:69–84
Fry CH, Fry K (1992) Kingfishers, bee-eaters and rollers. Christopher Helm A&C Black, London
Gabbiani F, Krapp HG, Laurent G (1999) Computation of object approach by a wide-field motion-sensitive neuron. J Neurosci 19:1122–1141
Gibson JJ (1958) Visually controlled locomotion and visual orientation in animals. Br J Psychol 49:182–194
Gray JR, Lee JK, Robertson RM (2001) Activity of descending contralateral movement detector neurons and collision avoidance behaviour in response to head-on visual stimuli in locusts. J Comp Physiol A 187:115–129
Herberholz J, Sen MM, Edwards DH (2004) Behavioural and neural responses in crayfish to attacks from a natural predator. Presented at the 7th Congress of the International Society for Neuroethology, Denmark. Muscle, Motor and Sensory-Motor Systems Abstract PO233
Hoy RR, Nolen T, Brodfuehrer P (1989) The neuroethology of acoustic startle and escape in flying insects. J Exp Biol 146:287–306
Hudleston JA (1958) Some notes on the effects of bird predators on hopper bands of the desert locust (Schistocerca gregaria Forskal). Entomol Monthly Mag 94:210–214
Jensen M (1956) Biology and physics of locust flight III. The aerodynamics of locust flight. Philos Trans R Soc Lond B 239:511–552
Judge SJ, Rind FC (1997) The locust DCMD, a movement-detecting neurone tightly tuned to collision trajectories. J Exp Biol 200:2209–2216
Libersat F, Hoy RR (1991) Ultrasonic startle behaviour in bushcrickets (Orthoptera; Tettigoniidae). J Comp Physiol A 169:507–514
Miller LA (1975) The behaviour of flying green lacewings, Chrysopa carnea, in the presence of ultrasound. J Insect Physiol 21:205–219
Nickerson B (1958) Some observations of the carmine bee-eater Merops nubicus Gmelin in the French Sudan. Ibis 100:454–457
O’Shea M, Rowell CHF (1975) A spike-transmitting electrical synapse between visual interneurons in the locust movement detector system. J Comp Physiol A 97:143–158
O’Shea M, Rowell CHF, Williams JLD (1974) The anatomy of a locust visual interneurone: the descending contralateral movement detector. J Exp Biol 60:1–12
Pearson KG, Boyan GS, Bastiani M, Goodman CS (1985) Heterogenous properties of segmentally homologous interneurons in the ventral nerve cord of locusts. J Comp Neurol 233:133–145
Pfau HK (1977) Zur Morphologie und Funktion des Vorderfügels und Vorderfügelgelenks von Locusta migratoria L. Fortschr Zool 24:341–345
Pond CM (1972) Neuromuscular activity and wing movements at the start of flight of Periplaneta americana and Schistocerca gregaria. J Comp Physiol 78:192–209
Reichert H, Rowell CHF (1985) Integration of nonphaselocked exteroceptive information in the control of rhythmic flight in the locust. J Neurophysiol 53:1201–1218
Reichert H, Rowell CHF (1986) Neuronal circuits controlling flight in the locust: how sensory information is processed for motor control. Trends Neurosci 9:281–283
Rind FC (1984) A chemical synapse between two motion detecting neurons in the locust brain. J Exp Biol 110:143–167
Rind FC, Santer RD (2004) Collision avoidance and a looming sensitive neuron: size matters but biggest is not necessarily best. Proc R Soc Lond B 271:S27-S29
Rind FC, Simmons PJ (1992) Orthopteran DCMD neuron: a reevaluation of responses to moving objects. I. Selective responses to approaching objects. J Neurophysiol 68:1654–1666
Robert D (1989) The auditory behaviour of flying locusts. J Exp Biol 147:279–301
Robertson RM, Johnson AG (1993) Collision avoidance of flying locusts: steering torques and behaviour. J Exp Biol 183:35–60
Robertson RM, Reye DN (1992) Wing movements associated with collision-avoidance manoeuvres during flight in the locust Locusta migratoria. J Exp Biol 163:231–258
Roeder KD (1962) The behaviour of free flying moths in the presence of artificial ultrasonic pulses. Anim Behav 10:300–304
Roeder KD (1967) Nerve cells and insect behaviour. Harvard University Press, Cambridge
Schlotterer GR (1977) Response of the locust descending movement detector neuron to rapidly approaching and withdrawing visual stimuli. Can J Zool 55:1372–1376
Schulze W, Schul J (2001) Ultrasound avoidance behaviour in the bushcricket Tettigonia viridissima (Orthoptera: Tettigoniidae). J Exp Biol 204:733–740
Simmons PJ (1980a) A locust wind and ocellar brain neurone. J Exp Biol 85:281–294
Simmons PJ (1980b) Connexions between a movement-detecting visual interneurone and flight motoneurones of a locust. J Exp Biol 86:87–97
Simmons PJ, Rind FC (1992) Orthopteran DCMD neuron: a reevaluation of responses to moving objects. II. Critical cues for detecting approaching objects. J Neurophysiol 68:1667–1682
Simmons PJ, Rind FC (1997) Responses to object approach by a wide field visual neurone, the LGMD2 of the locust: characterization and image cues. J Comp Physiol A 180:203–214
Smith KD, Popov GB (1953) On birds attacking desert locust swarms in Eritrea. The Entomologist 86:3–7
Snodgrass RE (1929) The thoracic mechanism of a grasshopper and its antecedents. Smithson. Misc Collns 82:1–111
Symmons PM, Cressman K (2001) Desert locust guidelines 1. Biology and behaviour. Food and Agriculture Organisation of the United Nations, Rome
Thomas ALR, Taylor GK (2001) Animal flight dynamics I. Stability in gliding flight. J Theor Biol 212:399–424
Weis-Fogh T (1956) Biology and physics of locust flight II. Flight performance of the desert locust (Schistocerca Gregaria). Philos Trans R Soc Lond B 239:459–510
Wheatstone C (1852) Contributions to the physiology of vision. II. Philos Trans R Soc Lond B 142:1–18
Yager DD, May ML (1990) Ultrasound-triggered, flight-gated evasive maneuvers in the praying mantis Parasphendale agrionina II. Tethered flight. J Exp Biol 152:41–58
Yager DD, May ML, Fenton MB (1990) Ultrasound-triggered, flight-gated evasive maneuvers in the praying mantis Parasphendale agrionina I. Free flight. J Exp Biol 152:17–39
Acknowledgements
Supported by the Gatsby Charitable Foundation and the BBSRC (Grant 13/S17899). We thank Dr. Jeremy Thomason for the use of the high-speed camera equipment in preliminary experiments, Bob McGowan (National Museums of Scotland) and John Curton (Columbus Zoo and Aquarium) for providing the carmine bee-eater measurements, and Dr. Hanno Fischer for helpful discussions. The experiments described in this manuscript comply with the ‘Principles of animal care’, publication No. 86-23 revised 1985, of the National Institute of Health and also with the current laws of the UK.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Santer, R.D., Simmons, P.J. & Rind, F.C. Gliding behaviour elicited by lateral looming stimuli in flying locusts. J Comp Physiol A 191, 61–73 (2005). https://doi.org/10.1007/s00359-004-0572-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00359-004-0572-x