
Abstract
We consider a nematic liquid crystal occupying the exterior region in \({\mathbb {R}}^3\) outside of a spherical particle, with radial strong anchoring. Within the context of the Landau-de Gennes theory, we study minimizers subject to an external field, modeled by an additional term which favors nematic alignment parallel to the field. When the external field is high enough, we obtain a scaling law for the energy. The energy scale corresponds to minimizers concentrating their energy in a boundary layer around the particle, with quadrupolar symmetry. This suggests the presence of a Saturn ring defect around the particle, rather than a dipolar director field typical of a point defect.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In this paper, we continue the study started in Alama et al. (2016b) of a spherical colloid particle immersed in nematic liquid crystal (see also Alama et al. 2016a, 2015). Motivated by the experiments described in Gu and Abbott (2000), Loudet and Poulin (2001) and the heuristic and numerical arguments exposed in Stark (2002), Fukuda et al. (2004), Fukuda and Yokoyama (2006), we are interested in the effect of an external magnetic or electric field on the type of defects that can be observed.
Nematic liquid crystals are typically made of elongated molecules which tend to align in a common direction. Several continuum models have been proposed to describe this alignment, including the Oseen-Frank and the Landau-de Gennes models. In the Oseen-Frank description, the alignment is represented by a unit director \(n\in {\mathbb {S}}^2\), and the Landau-de Gennes theory employs the so-called Q-tensors: traceless symmetric \(3\times 3\) matrices, accounting for the alignment of the molecules through their eigenvectors and eigenvalues. With respect to directors \(n\in {\mathbb {S}}^2\), the Q-tensors can be thought of as relaxing the uniaxial constraint
The Landau-de Gennes energy enforces this uniaxial constraint as a small coherence length goes to zero, the limit in which one can recover the Oseen-Frank model. This convergence has recently produced a rich trove of mathematical analysis (Majumdar and Zarnescu 2010; Canevari 2015, 2016; Bauman et al. 2012; Golovaty and Montero 2014; Contreras et al. 2016). An important feature in experiment and in the analysis is the occurrence of defects (singular structures). Compared to the director description, the additional degrees of freedom offered by Q-tensors allow for a much finer description of the defect cores where biaxiality might occur, and the nonlinear analysis of defect cores has recently attracted much attention (Ignat et al. 2016a, b; Di Fratta et al. 2016; Ignat et al. 2014, 2015; Canevari 2015; Contreras and Lamy 2017).
When foreign particles are immersed into nematic liquid crystal, the modifications they induce in the nematic alignment may generate additional defects, leading to many potential applications related, e.g., to the detection of these foreign particles or to structure formation created by defect interactions (Stark 2001). The mathematical analysis of such phenomena is very challenging. Here we are interested in the most fundamental situation: a single spherical particle in a sea of liquid crystals.
We assume radial anchoring at the particle surface : the liquid crystal molecules tend to align perpendicularly to the surface. This creates a topological charge that has to be balanced by a defect so as to be compatible with a uniformly (say vertically) aligned state far away from the particle. In the absence of external field, two different types of configurations have been predicted and observed: the so-called hedgehog and Saturn ring. The hedgehog configuration presents one point defect above (or below) the particle. The Saturn ring configuration presents a line defect around the particle. Both configurations are axially symmetric with respect to the vertical axis, and the Saturn ring configuration enjoys the additional mirror symmetry with respect to the equatorial plane. Hedgehog configurations have been observed for large particles and Saturn rings for smaller particles. In our previous work Alama et al. (2016b), we provided a rigorous mathematical justification of these observations based on the Landau-de Gennes model, together with a very precise description of the Saturn ring.
In the presence of an external field, the situation changes, as a Saturn ring defects can be observed even around large particles (Gu and Abbott 2000). A heuristical explanation proposed in Stark (2002) is that the external field confines defects to a much narrower region around the particle, which is favorable to the Saturn ring type of defect. This explanation has been confirmed numerically in Fukuda et al. (2004), Fukuda and Yokoyama (2006) using a Landau-de Gennes model and assuming the external field to be uniform in the sample. There the presence of the external field is simply modeled by adding a symmetry-breaking term to the energy (favoring alignment along the field), multiplied by a parameter accounting for the intensity of the field. In the present paper, we study this simplified model and prove that, when the applied field is high enough, minimizers should indeed correspond to Saturn ring configurations.
After adequate nondimensionalization (Fukuda et al. 2004), we are left with two parameters \(\xi ,\eta >0\) which represent, in units of the particle radius, the coherence lengths for nematic alignment and alignment along the external field. In these units, the colloid particle is represented by the closed ball of radius one \(B=\lbrace {\left| \cdot \right| }\le 1\rbrace {\subset }{\mathbb {R}}^3\), so that the liquid crystal is contained in the domain \(\Omega ={\mathbb {R}}^3\setminus B\). The Landau-de Gennes energy used in Fukuda et al. (2004), Fukuda and Yokoyama (2006) is given by
The map Q takes values into the space \({\mathcal {S}}_0\) of \(3\times 3\) symmetric matrices with zero traces and describes nematic alignment. The nematic potential is given by
where the constant C is such that f satisfies
The symmetry-breaking potential g(Q) is given by
It breaks symmetry in the sense that the rotations \(R\in SO(3)\) which satisfy \(g({}^t R Q R)=g(Q)\) for all \(Q\in {\mathcal {S}}_0\) must have \(e_3\) as an eigenvector, while \(f({}^tR Q R)=f(Q)\) for all \(R\in SO(3)\) and \(Q\in {\mathcal {S}}_0\). Its specific form is chosen so that
and g(Q) is invariant under multiplication of Q by a positive constant (Fukuda et al. 2004). This potential satisfies
Hence for \(h>0\) the full potential \(f(Q)+hg(Q)\) is minimized exactly at \(Q=Q_\infty \), where
Moreover it is easily checked that
for some constant \(C(h)>0\). This ensures that the energy is coercive on the affine space \(Q_\infty + H^1(\Omega ;{\mathcal {S}}_0)\). The anchoring at the particle surface is assumed to be radial:
Denoting by \({\mathcal {H}}\) the space
the coercivity of the energy ensures existence of a minimizer in \({\mathcal {H}}\) for any \(\xi ,\eta >0\).
Remark 1.1
The above choice of constants in the nematic potential f(Q) is justified since we are working at a fixed temperature, but in fact is chosen mainly to simplify notation. Indeed, our results remain valid for more general potentials of the form
that is, at temperatures below the nematic-isotropic transition, where (1) is still satisfied.
Remark 1.2
Accounting for the presence of an external field through the potential g(Q) is the result of several simplifying assumptions (Fukuda et al. 2004; Fukuda and Yokoyama 2006). In particular the field is assumed to be constant throughout the liquid crystal sample, an assumption that is more realistic in the case of a magnetic (vs. electric) field. We do not aim at questioning the physical validity of such assumption, but rather at understanding a simple model where the external field introduces a symmetry-breaking effect at some additional length scale.
In Fukuda and Yokoyama (2006, § 3.1), heuristic arguments are used to estimate the behavior of the different terms in the energy for a ‘hedgehog’ configuration and for a ‘Saturn ring’ configuration. Decomposing the energy as \(E=E_\mathrm{nem}+E_\mathrm{mag}\), where
they conjecture the asymptotics
In fact we believe that for the Saturn ring the magnetic part of the energy should also be of order \(1/\eta \) (with a smaller constant though), but this does not affect the conclusion that there should be a critical value
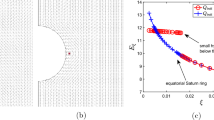
with the following properties. If \(\eta <\eta _c\) (high applied field) then the Saturn ring configuration has lowest energy, and if \(\eta >\eta _c\) (low applied field) then the hedgehog configuration has lowest energy. In Fukuda et al. (2004), Fukuda and Yokoyama (2006) this conjecture is checked numerically, for \(\xi =4\times 10^{-3}\) and \(\eta \) around \(10^{-1}\) (so that h lies between \(10^{-2}\) and \(10^{-1}\)) in Fukuda et al. (2004), and \(\xi =\overline{R}_0^{-1}\) between \(10^{-3}\) and \(10^{-2}\) and h of the same order in Fukuda and Yokoyama (2006).
Our aim in this work is to justify rigorously the fact that the Saturn ring configuration is minimizing for high fields, i.e., \(\eta \ll 1/{\left| \ln \xi \right| }\). We will tackle the regime \(\eta \gg 1/{\left| \ln \xi \right| }\) in a forthcoming work [2]. Since physically relevant values of \(\eta ,\xi \) satisfy \(\xi \lesssim \eta \ll 1\), we consider the limit \(\xi \rightarrow 0\) and assume that
With this convention, the energy functional depends only on the small parameter \(\xi \) and we write
for any measurable set \(U{\subset }\Omega ={\mathbb {R}}^3\setminus B\) and \(Q\in Q_\infty + H^1(\Omega ;{\mathcal {S}}_0)\).
One way to characterize a Saturn ring configuration versus a hedgehog configuration is its mirror symmetry: a Saturn ring configuration is symmetric with respect to the equatorial plane \(\lbrace x_3=0\rbrace \), while a hedgehog configuration is not, that is,
while for a hedgehog configuration these energies are different. Our first main result shows that a minimizing configuration must exhibit this symmetry asymptotically if \(\xi \lesssim \eta \ll {\left| \ln \xi \right| }^{-1}\), that is, for fields h which are bounded in \(\xi \), but much larger than \(\xi |\ln \xi |\).
Theorem 1.3
If \(Q_\xi \) minimizes \(E_\xi \) with boundary conditions (3) and
then
Remark 1.4
This asymptotic symmetry does not exclude in principle a configuration that would have a hedgehog defect somewhere in the equatorial plane \(\lbrace x_3=0\rbrace \). Our heuristic conclusion that the minimizing configuration carries a Saturn ring defect relies on the numerical observation (Fukuda et al. 2004; Fukuda and Yokoyama 2006) that a hedgehog defect in the equatorial plane is not among the possible minimizing configurations. Such configuration would presumably have a much higher energy than the bound established in Theorem 1.5 below.
Theorem 1.3 is a consequence of the more precise asymptotics we obtain for the energy of a minimizer. The potential
is minimized at \(Q=Q_\infty \). As \(\eta \rightarrow 0\), this forces a minimizing configuration to be very close to \(Q_\infty \). The boundary data \(Q_b\) satisfies \(f(Q_b)\equiv 0\) but not \(g(Q_b)\equiv 0\). Not surprisingly, deformations concentrate in a boundary layer of size \(\eta \), where a one-dimensional transition takes place according to the energy
defined for \(Q\in Q_\infty + H^1((1,\infty );{\mathcal {S}}_0)\). For \(\lambda =\infty \), this formula should be understood as
In other words, \(F_\infty \) is finite for maps \(Q\in Q_\infty + H^1((1,\infty );{\mathcal {S}}_0)\) which satisfy \(Q=n\otimes n -I/3\) for some measurable map \(n:(0,\infty )\rightarrow {\mathbb {S}}^2\).
Obviously the cases \(\lambda \in (0,\infty )\) and \(\lambda =\infty \) are quite different and they require separate treatments, but in both cases we obtain for the energy of a minimizer \(Q_\xi \) the asymptotics
where
The existence of a minimizer of \(F_\lambda \) which attains \(D_\lambda (Q_b(\omega ))\) for any \(\omega \in {\mathbb {S}}^2\) follows from the direct method. In Sect. 3.2, we will exploit the observation of Sternberg (1991) that the heteroclinic connections which minimize \(F_\lambda \) represent geodesics for a degenerate metric. In the case \(\lambda =\infty \) this enables us to obtain an exact value for the limiting energy,
where \(\kappa :=\root 4 \of {24}\). (See Lemma 3.4.)
More specifically, we obtain local asymptotics in angular subdomains of \(\Omega \). For \(U{\subset }{\mathbb {S}}^2\) we denote by \({\mathcal {C}}(U)\) the cone
and prove
Theorem 1.5
If \(Q_\xi \) minimizes \(E_\xi \) with boundary conditions (3) and
then for any measurable set \(U{\subset }{\mathbb {S}}^2\) it holds
Theorem 1.3 follows trivially from Theorem 1.5 by applying the latter to \(U=({\mathbb {S}}^2)_\pm = {\mathbb {S}}^2\cap \lbrace \pm x_3>0\rbrace \), since \(Q_b\) is symmetric under reflection with respect to the equatorial plane.
The lower bound in Theorem 1.5 follows from an elementary rescaling and the properties of \(\lambda \mapsto D_\lambda \). To obtain an upper bound matching this lower bound, a first approach would be to define a trial map Q on every radial direction by an appropriate rescaling of a minimizer of \(F_\lambda \), i.e., set
with \(Q_\omega \) minimizing \(F_\lambda \) under the constraint \(Q_\omega (1)=Q_b(\omega )\). The problem with this approach is that it may not be possible to control the derivatives of such Q with respect to angular variable \(\omega \). We overcome this difficulty by using different arguments in the cases \(\lambda \in (0,\infty )\) and \(\lambda =\infty \).
For \(\lambda \in (0,\infty )\), we take advantage of the fact that, although the regularity of \(\omega \mapsto Q_\omega \) is not understood, the map \(\omega \mapsto F_\lambda (Q_\omega )=D_\lambda (Q_b(\omega ))\) is easily seen to be continuous, hence Riemann integrable. Thus we obtain a trial map by smoothly interpolating between \(Q_{\omega _i}(r)\) for a discrete set \(\lbrace \omega _i\rbrace \). The cost of this weak approach is that we cannot hope to obtain a more precise remainder than \(o(1/\eta )\).
For \(\lambda =\infty \) the map \(Q_\omega \) takes the form \(n\otimes n-I/3\) and this restriction allows to specify its dependence on \(\omega \). However the topological constraint enforced by the boundary conditions prevents it to be smooth : there is a jump as \(\omega \) crosses the equatorial plane \(\lbrace x_3=0\rbrace \). We modify the trial map near this plane by including a Saturn ring defect which rectifies the topological charge. With this approach, the remainder in the upper bound is actually of the order \(O({\left| \ln \xi \right| })\).
Finally, it is natural and tempting to make a direct comparison between the symmetric minimizer (which we expect to represent the Saturn ring) and its usual competitor, the dipolar hedgehog. The difficulty is that we do not know if there exists such a solution, nor how to impose constraints under which there would be a minimizer of this form. However, we can restrict our attention to uniaxial tensors with oriented director fields, \(Q=n\otimes n -{\frac{1}{3}} I\), \(n\in {\mathcal {N}}\), where
Within this orientable setting, the Saturn ring line defect is not admissible anymore since it carries a half-integer degree (Ball and Zarnescu 2011). We show that orientable configurations have much larger energy at leading order:
Proposition 1.6
Let \(Q_\xi \) minimize \(E_\xi \) with boundary conditions (3) and \(\eta =\eta (\xi )\) with
Then, for any \(Q=n\otimes n -{\frac{1}{3}} I\) with \(n\in {\mathcal {N}}\), and any \(\xi >0\), we have
The paper is organized as follows. In Sect. 2, we prove the lower bound. In Sect. 3, we concentrate on the upper bound, considering the case \(\lambda \in (0,\infty )\) in Sect. 3.1 and \(\lambda =\infty \) in Sect. 3.2. We conclude with the short proofs of Theorem 1.5 and Proposition 1.6 in Sect. 4.
2 Lower Bound
In this section, we prove the
Proposition 2.1
If \(Q_\xi \) minimizes \(E_\xi \) with boundary conditions (3) and
then for any measurable set \(U{\subset }{\mathbb {S}}^2\) it holds
Proof
We use spherical coordinates \(x=r\omega \), \((r,\omega )\in (1,\infty )\times {\mathbb {S}}^2\). Setting \(r=1+\eta ({\tilde{r}} -1)\) and
we have
using (5) and (6) for the last inequality. We conclude using the fact (see Lemma 2.2 below) that
and Fatou’s lemma. \(\square \)
Lemma 2.2
For any \(Q_0\in {\mathcal {S}}_0\) and \(\lambda \in (0,\infty ]\) we have
Proof
The arguments are standard, we only sketch them here.
We first treat the case where \(D_\lambda (Q_0)=+\infty \). This occurs only if \(\lambda =\infty \) and \(f(Q_0)>0\). Then we also have \(D_\mu (Q_0)\rightarrow \infty \) as \(\mu \rightarrow \lambda =\infty \). Otherwise there would exist a sequence \(\mu _k\rightarrow \infty \) and maps \(Q^k\) with \(Q^k(1)=Q_0\) such that \(F_{\mu _k}(Q^k)\le C\), and therefore, up to a subsequence \(Q^k\) converges weakly in \(H^1((1,\infty );{\mathcal {S}}_0)\) to a map \(Q^*\) with \(Q^*(1)=Q_0\). However, the bound \(\mu _k^2\int f(Q^k)\le C\) implies that \(f(Q^*)=0\) a.e., contradicting \(f(Q_0)>0\).
Hence we may assume that \(D_\lambda (Q_0)<\infty \) and pick a minimizer \(Q^\lambda \) of \(F_\lambda \) with \(Q^\lambda (1)=Q_0\). Fix a sequence \(\mu _k\rightarrow \lambda \) and minimizers \(Q^k\) of \(F_{\mu _k}\) with \(Q^k(1)=Q_0\). Then we have the bound
and therefore, up to a subsequence, \(Q^k\) converges weakly in \(H^1((1,\infty );{\mathcal {S}}_0)\) toward a map \(Q^*\). The weak lower semi-continuity of \(\int {\left| \mathrm{d}Q/\mathrm{d}r\right| }^2\) and Fatou’s lemma then imply
so that combining the above we have
and deduce \(\lim F_{\mu _k}(Q^k)=\lim D_{\mu _k}(Q_0)=D_\lambda (Q_0)\). \(\square \)
3 Upper Bound
3.1 The Case \(\lambda \in (0,\infty )\)
In this section, we assume that
and show that
where we recall that \({\mathcal {H}}\) is the space of admissible configurations, defined in (4).This is obtained by constructing an admissible comparison map. This comparison map depends on two parameters \(\varepsilon ,h>0\), the use of which will become clear in the course of the proof.
Proposition 3.1
For any \(\varepsilon ,h,\xi >0\) there exists a map \(Q_\xi ^{h,\varepsilon }\) such that
where \(\lim _{h\rightarrow 0}(\lim _{\varepsilon \rightarrow 0}\sigma (h,\varepsilon )) =0\).
Proof
We construct an axially symmetric map \(Q_\xi ^{h,\varepsilon }\) of the form
where \({\widetilde{Q}}^{h,\varepsilon }({\tilde{r}}, \theta )\) is a smooth map to be determined later, and \(R_\varphi \) is the rotation of angle \(\varphi \) and axis \({\mathbf {e}}_3\). Dropping the exponents \(h,\varepsilon \) (as we will do when there is no confusion) it holds
The function \(\Xi \) is a nonnegative quadratic form with bounded coefficients depending smoothly on \(\varphi \). Since \(Q_\infty \) commutes with \(R_\varphi \), \(\Xi [{\widetilde{Q}}]\) vanishes at \({\widetilde{Q}}=Q_\infty \) and satisfies
for some absolute constant \(C>0\). Integrating in \(\Omega \) and changing variables according to \(r-1=\eta ({\tilde{r}}-1)\) we find
For any fixed \(h,\varepsilon >0\) we will have \(\sup _\xi {\mathcal {R}}_\xi ({\widetilde{Q}}^{h,\varepsilon })<\infty \) provided
Note that (8) implies that \({\widetilde{Q}}^{h,\varepsilon }-Q_\infty \equiv 0\) for large \({\tilde{r}}\) and near \(\theta =0\) and \(\theta =\pi \). Moreover we have
Since \(f(Q_\infty )=g(Q_\infty )=0\), if (8) is satisfied for all \(h,\varepsilon >0\), we deduce, gathering the above,
where \(F_\lambda \) was defined in (5). Recall that
The functional \(F_\lambda \) is invariant under pointwise conjugation by \(R_\varphi \) for any angle \(\varphi \in {\mathbb {R}}\), and therefore
Since \(Q_b(\omega )=Q_b(\theta ,\varphi )\) is axially symmetric, in other words
we deduce that \(D_\lambda (Q_b(\theta ,\varphi ))\) does not depend on the azimuthal angle \(\varphi \), and
Combining this with (9), in order to prove Proposition 3.1 it suffices to construct for all \(h,\varepsilon >0\) a smooth map \({\widetilde{Q}}^{h,\varepsilon }({\tilde{r}},\theta )\) which satisfies (8) and
In principle one would like to choose \({\widetilde{Q}}(\cdot ,\theta )\) minimizing \(F_\lambda \) with respect to the boundary condition \({\widetilde{Q}}(1,\theta )=Q_b(\theta ,0)\). But it is not obvious that such a map \({\widetilde{Q}}\) would be (even weakly) differentiable in \(\theta \). However we can make use of the continuity of \(\theta \mapsto D_\lambda (Q_b(\theta ,0))\) to bypass this issue, at the price of introducing the extra parameters \(h,\varepsilon >0\).
Thanks to Lemma 3.2 below, the function \(\theta \mapsto D_\lambda (Q_b(\theta ,0))\sin \theta \) is continuous on \([0,\pi ]\). In particular it is Riemann integrable, and there exists a family of partitions
such that
For any \(i\in \lbrace 1,\ldots , I_h-1\rbrace \) there exists a map \({\widetilde{Q}}_i^h({\tilde{r}})\) such that \({\widetilde{Q}}_i^h-Q_\infty \in C_c^\infty ([1,\infty ))\) and
Then, defining
we obtain
Eventually we define \({\widetilde{Q}}^{h,\varepsilon }\) by smoothing \({\widetilde{Q}}^h\) in \(\theta \), i.e.,
for some smooth kernel \(\varphi _\varepsilon (\theta )=\varepsilon ^{-1}\varphi (\theta /\varepsilon )\). Such map \({\widetilde{Q}}^{h,\varepsilon }\) satisfies (8), and
By dominated convergence we thus have
Combining this with (11) we obtain (10), thus completing the proof. \(\square \)
Lemma 3.2
The map \(Q_0\mapsto D_\lambda (Q_0)\) is locally Lipschitz.
Proof
Let \(Q_0^1,Q_0^2\in {\mathcal {S}}_0\) be such that \({\left| Q_0^1\right| },{\left| Q_0^2\right| }\le M\). Let \({\widetilde{Q}}^1\) be such that
Let \(\delta >0\) and define
Then
for \(C=\sup _{{\left| Q\right| }\le M}(\lambda ^2 f+g)\). Choosing \(\delta =C^{-1/2}{\left| Q_0^1-Q_0^2\right| }\) yields
thus proving the local Lipschitz continuity of \(D_\lambda \). \(\square \)
3.2 The Case \(\lambda =\infty \)
We next consider a complementary regime to the one considered above, with \(\eta =\eta (\xi )\) such that
that is, the characteristic length scale determined by the field is much larger than the length scale determined by elastic response in the nematic. Again, we derive an upper bound on the energy by constructing an appropriate test map, whose structure suggests the anticipated form of the minimizers. We show:
Proposition 3.3
There exists a map \(Q_\xi \) such that
Before proving the proposition we require some further information about the minimizing geodesic of the problem \(D_\infty \). Recall that this minimization is taken over uniaxial tensors and thus reduces to a problem for unit vector fields \(n\in {\mathbb {S}}^2\). We note that for \(Q=n\otimes n -\frac{1}{3} I\), the magnetic energy density is expressed as
with a slight abuse of notation. This is both a major simplification and a minor complication: whereas the potential vanishes for exactly one uniaxial tensor \(Q_\infty \), it vanishes for two antipodal directors \(n=\pm \,{\mathbf {e}}_3\). We denote by \(\omega (\theta ,\varphi )\) the point on \({\mathbb {S}}^2\) with angular coordinates \((\theta ,\varphi )\in [0,\pi ]\times [0,2\pi )\). Define
for \(n\in H^1_{loc}( [0,\infty ); {\mathbb {S}}^2)\) with \(n(0)=\omega (\theta ,\varphi )\), so that
Finiteness of the energy enforces the condition \(n(t)\rightarrow \pm {\mathbf {e}}_3\) as \(t\rightarrow \infty \), but the choice of terminal point will depend on the initial value \(n(0)\in {\mathbb {S}}^2\). Let
Then, since \(n(0)=\omega \) is chosen such that \(Q_b(\omega (\theta ,\varphi ))=n(0)\otimes n(0)-\frac{1}{3} I\), we have
By symmetry it is enough to consider the case where the target point is \(+{\mathbf {e}}_3\). We have the following characterization of the minimizers:
Lemma 3.4
For any \(\omega \in {\mathbb {S}}^2\) with angular coordinates \((\theta ,\varphi )\in [0,\pi ]\times [0,2\pi )\) there exists a minimizer \(n=n(t,\theta ,\varphi )\) of \(d_\infty ^+(\omega )\), with
The minimizer is \(C^1\) smooth and equivariant, that is \(n(t,\theta ,\varphi )=R_\varphi n(t,\theta ,0)\) for all \(\varphi \). Moreover, we have
for constant \(C>0\), uniformly in \(\theta ,\varphi \).
Proof
The existence of a minimizer for each fixed \((\theta ,\varphi )\) follows from Sternberg (1991); the other statements are special to our case. First, we note that for any rotation \(R_\varphi \), \(G_\infty (R_\varphi n)= G_\infty (n)\), and thus, it is sufficient to consider the case \(\varphi =0\). We claim that given any admissible \(n(t)=(n_1,n_2,n_3)\), the configuration \(N(t)=(\sqrt{1-n_3^2},0,n_3)\) has energy \(G_\infty (N)\le G_\infty (n)\). Indeed, we calculate
and
by the Cauchy–Schwartz inequality. Thus, it is sufficient to consider \(\varphi =0\), \(n=N\), and
Moreover, the curve \(\gamma \) traced by n(t) follows a meridian on the sphere.
Following Sternberg (1991), we note that
where \(\gamma \) is the curve traced out by n(t), \(\kappa =\root 4 \of {24}\), and the integral is with respect to arclength \(\mathrm{d}s\) on \(\gamma \). Equality holds when \(|\dot{n}|=\sqrt{g(n)}\), that is,
which may be integrated to give an explicit formula for the heteroclinic,
Clearly, n is smooth with respect to both t and \(\theta \in (0,\pi ]\), and a simple calculation shows that \({\partial n\over \partial \theta }(t,0)=0\), and so it is smooth for all \((t,\theta )\). The exponential decay also follows from direct calculation. Finally, to evaluate the energy at a minimizer, recall that in (13) equality is achieved at a minimizer, and so
\(\square \)
Remark 3.5
It is easy to see that the minimizer \(n(t,\theta ,\varphi )\) of \(d_\infty ^-(\theta ,\varphi )\) has energy \(G_\infty (n)=\kappa (1+\cos \theta )\), and so \(D_\infty (Q_b(\theta ,\varphi ))=\kappa (1-|\cos \theta |)\).
We are now ready to prove our upper bound proposition.
Proof of Proposition 3.3
We construct an axially symmetric map \(Q_\xi \) of the form
where \(R_\varphi \) is (as before) the rotation of angle \(\varphi \) about the axis \({\mathbf {e}}_3\). As above, in spherical coordinates we decompose the gradient as:
As the energy will be the same in each vertical cross section \(\{\varphi =\text {constant}\}\) it will be convenient to define a two-dimensional energy,
for \(U{\subset }\Omega _0:=\lbrace (r,\theta ):r>1,\, 0< \theta < \pi \rbrace \). We construct \({\overline{Q}}_\xi \) in the upper half \(\Omega _0^+:=\{(r,\theta ): \ r>1, \ 0\le \theta <{\pi \over 2}\}\) of the cross section \(\{\varphi =0\}\), and define its value in the lower cross section \(\theta \in ({\pi \over 2},\pi ]\) by reflection,
Moreover, we divide the region \(\{(r,\theta ): \ r>1, \ 0\le \theta <{\pi \over 2}\}\) into three subregions, and define \({\overline{Q}}_\xi \) as a smooth map in each, continuous across the common boundaries (Fig. 1).

Three subregions of \(\Omega _0^+\) used in the proof of Proposition 3.3
Region 1
\(\Omega _1=\{(r,\theta ): \ r>1, 0\le \theta \le {\pi \over 2}-\eta \}\). In this region, \({\overline{Q}}_\xi \) will be uniaxial, \({\overline{Q}}_\xi = \bar{n}\otimes \bar{n}-\frac{1}{3} I\), for a director field \(\bar{n}\in {\mathbb {S}}^2\). Specifically, let
denote the minimizing geodesic which attains the distance \(D_\infty (Q_b(\theta ,0))\), and whose explicit formula is given in (14). Then, for \((r,\theta )\in \Omega _1\) and \(t= (r-1)/\eta \), we set
Using the above expression of the energy density (16) we derive
as the \(\varphi \) derivative term simplifies to \(\Xi ({\overline{Q}}_\xi )= 2|\bar{n}_1|^2\). As \({\overline{Q}}_\xi \) is uniaxial, \(f({\overline{Q}}_\xi )\equiv 0\), and \(g({\overline{Q}}_\xi )=\sqrt{\frac{3}{2}}(1-\bar{n}_3^2)\). The energy in \(\Omega _1\) then becomes, after the change of variable \(r=1+\eta t\),
since by the exponential decay estimates of Lemma 3.4, each of the remaining integrals converges, and carries at least one factor of \(\eta \).
Region 2
\(\Omega _2=\{(r,\theta ): \ r\ge 1+2\eta , {\pi \over 2}-\eta \le \theta \le {\pi \over 2}\}\). By the exponential decay of \(\bar{n}\) to \({\mathbf {e}}_3\), the value of \({\overline{Q}}_\xi \) on the ray \(r\ge 1+2\eta \), \(\theta ={\pi \over 2}-\eta \) is already close to \(Q_\infty \), so here we interpolate between the two in this sector. Define \(\Phi _\eta ^+(t)\) to be the spherical angle associated to the heteroclinic \(n^+(t):=n(t,{\pi \over 2}-\eta )\), that is,
We note for later use that the exponential decay of n to \({\mathbf {e}}_3\) implies that the angle \(\Phi _\eta ^+(t)\) also has exponential decay to zero as \(t\rightarrow \infty \).
We extend \({\overline{Q}}_\xi \) to \(\Omega _2\) uniaxially by interpolating this angle: define
Then, for \(r\ge 1+2\eta \) and \({\pi \over 2}-\eta <\theta \le {\pi \over 2}\) we set
where (as usual) \(r=1+\eta t\).
To evaluate the energy in this sector we use
We then calculate the energy, recalling that \({\overline{Q}}_\xi \) is uniaxial, and so \(f({\overline{Q}}_\xi )=0\) and
Changing variables from \(r=1+\eta t\), since each term in the integrand is bounded by a decaying exponential in \(t\), we have the estimate:
Note that when \(\theta =\frac{\pi }{2}\), \(n_3={\mathbf {e}}_3\). When reflecting to the lower half of the cross section this will create a discontinuity in the director field, but will be invisible in the tensor \({\overline{Q}}_\xi \), which will take the value \(Q_\infty \) continuously across the equatorial plane.
Region 3
\(\Omega _3^+=\{(r,\theta ): \ 1<r<1+2\eta , {\pi \over 2}-\eta \le \theta \le {\pi \over 2}\}\). Unlike the other regions, here our test configuration will not be uniaxial; it is here that we imagine that the Saturn ring defect will occur.
It will be convenient to construct \({\overline{Q}}_\xi \) in the symmetric domain obtained by reflection across the equatorial plane, \(\Omega _3:=\{(r,\theta ): \ 1<r<1+2\eta , {\pi \over 2}-\eta \le \theta \le {\pi \over 2}+\eta \}\). We note that by the previous steps (and the definition of \({\overline{Q}}_\xi \) by reflection to the lower hemisphere,) the values of \({\overline{Q}}_\xi \) have already been determined on \(\partial \Omega _3\); in particular, \({\overline{Q}}_\xi |_{\partial \Omega _3}\) is uniaxial, with director which carries a degree of \(-\frac{1}{2}\).
Consider the square domain \(\widetilde{\Omega }_3=\{-1<s<1, \ -1<\tau <1\}\), which is obtained from \(\Omega _3\) via the change of variables
Note that here we are considering \((s,\tau )\) as Cartesian coordinates, with Jacobian \(\mathrm{d}r\, \mathrm{d}\theta =\eta ^2 \mathrm{d}s\, \mathrm{d}\tau \). We will define \({\overline{Q}}_\xi (r,\theta )={\widetilde{Q}}_\xi (s,\tau )\) for \((s,\tau )\in \widetilde{\Omega }_3\), with \({\widetilde{Q}}_\xi \) the solution of an appropriate boundary value problem. The energy in \(\Omega _3\) transforms as,
with \(r(s),\theta (t)\) as in (19), and \(\varepsilon :=\xi /\eta \rightarrow 0\). The boundary conditions induced from \({\overline{Q}}_\xi |_{\partial \Omega _3}\), given in terms of the director field, are:
-
\(n_\eta ^+(s+1)=n(s+1,{\pi \over 2}-\eta )\), for \(s\in [-1,1]\), \(\tau =1\);
-
its reflection, \(Tn_\eta ^+(s+1)=n(s+1,{\pi \over 2}+\eta )\), for \(s\in [-1,1]\), \(\tau =-1\);
-
the rescaled homeotropic condition, \((\cos (\tau \eta ),0,\sin (\tau \eta ))\), for \(s=-1\), \(\tau \in [-1,1]\);
-
the interpolated field from Region 2, \((\sin (\tau \Phi _\eta ^+(2)), 0, \text {sgn}(\tau )\cos (\tau \Phi _\eta ^+(2))\), for \(s=1\), \(-1\le \tau \le 1\), which is discontinuous but well defined as a Q-tensor.
Moreover each component converges in \(C^1\) as \(\eta \rightarrow 0\), and the boundary conditions determine a degree \(-\frac{1}{2}\) map on \(\partial \widetilde{\Omega }_3\).
Introducing polar coordinates \((\rho ,\alpha )\) in \(\widetilde{\Omega }_3\), we parametrize the square \(\partial \widetilde{\Omega }_3\) with respect to the polar angle, \(\rho =\gamma (\alpha )\), \(0\le \alpha <2\pi \). The boundary conditions given above may then be described in terms of this parametrization of \(\partial \widetilde{\Omega }_3\) via a phase \(\Psi _\eta (\alpha )\) which is continuous and piecewise smooth on \([0,2\pi )\), in the form
Since \({\hat{n}}_\eta (0)={\mathbf {e}}_3 = -{\hat{n}}_\eta (2\pi )\), this defines a continuous and piecewise smooth uniaxial tensor \({\hat{Q}}_\eta ={\hat{n}}_\eta \otimes {\hat{n}}_\eta -I/3\) on \(\partial \widetilde{\Omega }_3\). In a similar way we define \(\Psi _0\), \({\hat{n}}_0\), \({\hat{Q}}_0\) corresponding to the \(\eta \rightarrow 0\) limits of the boundary value components, parametrized by the polar angle \(\alpha \). The convergence \({\hat{Q}}_\eta \rightarrow {\hat{Q}}_0\) is uniform on \(\partial {\widetilde{\Omega }}_3\), so \({\hat{Q}}_0\) is homotopic to the uniaxial map of degree \(-1/2\) corresponding to the phase \(\Theta _0 (\alpha )=-\alpha /2\), \(\alpha \in [0,2\pi )\).
We first define \({\widetilde{Q}}_\xi \) in the square annulus \(\widetilde{\Omega }_3\setminus \overline{\widetilde{\Omega }}_{3/2}\), where \(\widetilde{\Omega }_{3/2}=[-\frac{1}{2},\frac{1}{2}]\times [-\frac{1}{2},\frac{1}{2}]\) and is parametrized in polar coordinates by \(\rho =\frac{1}{2} \gamma (\alpha )\). As in \(\Omega _2\), we extend \({\widetilde{Q}}_\xi \) as a uniaxial tensor by interpolating the phase angle associated to its director, but here we interpolate along radii,
with \({\hat{n}}_\eta (\rho ,\alpha ):=(\sin {\hat{\Psi }}_\eta ,0,\cos {\hat{\Psi }}_\eta )\) and \({\widetilde{Q}}_\xi :={\hat{n}}_\eta \otimes {\hat{n}}_\eta -\frac{1}{3} I\). Since \({\widetilde{Q}}_\xi \) is piecewise smooth and \({\left\| \Psi _\eta \right\| }_{C^1}\) is bounded on each edge of the square, by inserting in (20) we obtain
It remains to define \({\widetilde{Q}}_\xi \) in the smaller square \(\widetilde{\Omega }_{3/2}\). Here the boundary data is uniaxial and \(\eta \)-independent, given by the phase angle \(\Theta _0(\alpha )=-\alpha /2\) and corresponding director \(n_0(\alpha )=(\sin \Theta _0,0,\cos \Theta _0)\). Provided \(\varepsilon <\frac{1}{4}\) we may set
With this definition of \({\widetilde{Q}}_\xi \) we have
Comparing with (20), we note that \(r(s),\sin \theta (t)\rightarrow 1\) uniformly on \(\widetilde{\Omega }_3\), and hence, we may conclude that
In conclusion, the only nontrivial contribution to the energy at order \(\frac{1}{\eta }\) comes from Region 1, and, extending the definition of \({\overline{Q}}_\xi \) by reflection to the entire cross section \(\Omega _0=\lbrace r>1,\, 0<\theta <\pi \rbrace \), we obtain the desired upper bound,
Defining \(Q_\eta \) via (15), we complete the proof of the proposition. \(\square \)
4 Proving Theorem 1.5 and Proposition 1.6
Proof of Theorem 1.5
For any measurable \(U{\subset }{\mathbb {S}}^2\) we have by Proposition 2.1
On the other hand, using (21) and the upper bound proved in Sect. 3 we obtain
\(\square \)
Proof of Proposition 1.6
Let \(Q= n\otimes n -\frac{1}{3} I\) with \(n\in \mathcal {N}\), for which \(E_\xi (Q)<\infty \). Then
In particular, by Fubini’s theorem, for almost every \(\omega \in {\mathbb {S}}^2\) and \(\eta ,\xi \) fixed, we have
and hence on almost every ray, \(n(r,\omega )\rightarrow \pm {\mathbf {e}}_3\) as \(r\rightarrow \infty \). Again by Fubini’s theorem, \(n(r,\cdot )\in H^1({\mathbb {S}}^2;{\mathbb {S}}^2)\) for almost every \(r>1\), and so either \(n(r,\omega )\rightarrow {\mathbf {e}}_3\) for almost all \(\omega \in {\mathbb {S}}^2\) or \(n(r,\omega )\rightarrow -{\mathbf {e}}_3\) for almost all \(\omega \in {\mathbb {S}}^2\). Without loss, we assume the former, \(n(r,\omega )\rightarrow {\mathbf {e}}_3\) a.e. In particular, after the familiar change of variables \(r=1+\eta t\), \({\hat{n}}(t,\omega ):=n(r,\omega )\) is an admissible function for the minimization problem \(d_\infty ^+\) for a.e. \(\omega \), and so,
by Lemma 3.4.
On the other hand, we note that \(D_\lambda \le D_\infty \) for any \(\lambda \in (0,\infty ]\), since the domain of \(F_\lambda \) contains the domain of \(F_\infty \), and on the latter both functionals coincide. Thus, for any \(\lambda \in (0,\infty ]\), by (7),
and the proposition follows. \(\square \)
References
Alama, S., Bronsard, L., Galvão Sousa, B.: Weak anchoring for a two-dimensional liquid crystal. Nonlinear Anal. 119, 74–97 (2015)
Alama, S., Bronsard, L., Lamy, X.: Analytical description of the saturn-ring defect in nematic colloids. Phys. Rev. E 93, 012705 (2016a)
Alama, S., Bronsard, L., Lamy, X.: Minimizers of the Landau-de Gennes energy around a spherical colloid particle. Arch. Ration. Mech. Anal. 222(1), 427–450 (2016b)
Alama, S., Bronsard, L., Golovaty, D., Lamy, X. (in preparation)
Ball, J.M., Zarnescu, A.: Orientability and energy minimization in liquid crystal models. Arch. Ration. Mech. Anal. 202(2), 493–535 (2011)
Bauman, P., Park, J., Phillips, D.: Analysis of nematic liquid crystals with disclination lines. Arch. Ration. Mech. Anal. 205(3), 795–826 (2012)
Canevari, G.: Biaxiality in the asymptotic analysis of a 2D Landau-de Gennes model for liquid crystals. ESAIM Control Optim. Calc. Var. 21(1), 101–137 (2015)
Canevari, G.: Line defects in the small elastic constant limit of a three-dimensional Landau-de Gennes model. arXiv:1501.05236 (2016)
Contreras, A., Lamy, X.: Biaxial escape in nematics at low temperature. J. Funct. Anal. 272(10), 3987–3997 (2017)
Contreras, A., Lamy, X., Rodiac, R.: On the convergence of minimizers of singular perturbation functionals. Indiana Univ. Math. J. (2016)
Di Fratta, G., Robbins, J.M., Slastikov, V., Zarnescu, A.: Half-integer point defects in the Q-tensor theory of nematic liquid crystals. J. Nonlinear Sci. 26(1), 121–140 (2016)
Fukuda, J., Stark, H., Yoneya, M., Yokoyama, H.: Dynamics of a nematic liquid crystal around a spherical particle. J. Phys. Condens. Matter 16(19), S1957 (2004)
Fukuda, J., Yokoyama, H.: Stability of the director profile of a nematic liquid crystal around a spherical particle under an external field. Eur. Phys. J. E 21(4), 341–347 (2006)
Golovaty, D., Montero, J.A.: On minimizers of a Landau-de Gennes energy functional on planar domains. Arch. Ration. Mech. Anal. 213(2), 447–490 (2014)
Gu, Y., Abbott, N.: Observation of saturn-ring defects around solid microspheres in nematic liquid crystals. Phys. Rev. Lett. 85, 4719–4722 (2000)
Ignat, R., Nguyen, L., Slastikov, V., Zarnescu, A.: Uniqueness results for an ODE related to a generalized Ginzburg-Landau model for liquid crystals. SIAM J. Math. Anal. 46(5), 3390–3425 (2014)
Ignat, R., Nguyen, L., Slastikov, V., Zarnescu, A.: Stability of the melting hedgehog in the Landau-de Gennes theory of nematic liquid crystals. Arch. Ration. Mech. Anal. 215(2), 633–673 (2015)
Ignat, R., Nguyen, L., Slastikov, V., Zarnescu, A.: Instability of point defects in a two-dimensional nematic liquid crystal model. Ann. Inst. H. Poincaré Anal. Non Linéaire 33(4), 1131–1152 (2016a)
Ignat, R., Nguyen, L., Slastikov, V., Zarnescu, A.: Stability of point defects of degree \(\pm \frac{1}{2}\) in a two-dimensional nematic liquid crystal model. Calc. Var. Partial Differ. Equ. 55(5), 119 (2016b)
Loudet, J.C., Poulin, P.: Application of an electric field to colloidal particles suspended in a liquid-crystal solvent. Phys. Rev. Lett. 87, 165503 (2001)
Majumdar, A., Zarnescu, A.: Landau-de Gennes theory of nematic liquid crystals: the Oseen–Frank limit and beyond. Arch. Ration. Mech. Anal. 196(1), 227–280 (2010)
Stark, H.: Physics of colloidal dispersions in nematic liquid crystals. Phys. Rep. 351(6), 387–474 (2001)
Stark, H.: Saturn-ring defects around microspheres suspended in nematic liquid crystals: an analogy between confined geometries and magnetic fields. Phys. Rev. E 66, 032701 (2002)
Sternberg, P.: Vector-valued local minimizers of nonconvex variational problems. Rocky Mt. J. Math. 21, 799–807 (1991)
Acknowledgements
We thank E. C. Gartland for useful discussions on nondimensionalization. SA and LB were supported by NSERC (Canada) Discovery Grants.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Robert V. Kohn.
Rights and permissions
About this article

Cite this article
Alama, S., Bronsard, L. & Lamy, X. Spherical Particle in Nematic Liquid Crystal Under an External Field: The Saturn Ring Regime. J Nonlinear Sci 28, 1443–1465 (2018). https://doi.org/10.1007/s00332-018-9456-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00332-018-9456-z