
Abstract
This paper presents the numerical investigation of the microtube heat sink with impingement jet feeding. The inlet channel covers only the quarter of the tube perimeter so the swirl flow is settled in the tubes and the heat transfer between the liquid flow and silicon substrate is improved. The water with the variable physical properties is used as the working fluid and laminar flow regime is considered. The proposed microtube heat sink with impingement jet feeding is compared with classic microtube heat sink in terms of temperature variation along the heated surface and temperature difference. The influence of the temperature dependent physical properties on the fluid flow and heat transfer is analyzed.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The thermal management of the electronic devices and power sources became the challenging issue in the last decade because of both, miniaturization and heat transfer rate increasing. The various cooling solutions have been proposed using both the single and two-phase heat transfer. Since this paper deals with the single phase heat transfer of water, only these cooling solutions will be considered.
The advantage of the single-phase microchannel heat sink, is based on an increase the heat transfer coefficient as the hydraulic diameter is deceasing. Also the channel walls are acting as the fins that increase the heat transfer area. For the case of the microchannel heat sinks, the investigations are made for single layer arrangement [1–6] and double layer arrangement [7, 8]. The research has been made experimentally and numerically although the analytical solution based on a porous model has been announced [9]. The fractal branching microchannel heat sink was investigated in [10]. Also, the viscous dissipation effect and the slip flow regime were considered for rectangular microchannel heat sinks [11, 12]. In addition, the review chapters on micro-heat sinks might be found in [13, 14].
Contrary to the microchannel heat sink, Soliman et al. [15] presented the results for the numerical modeling made on microtube heat sink. The constant property laminar heat transfer of the water through the microtubes is considered. It was found that proposed heat sink have higher thermal resistance and requires lower pumping power compared to the microchannel heat sink for the same Re and hydraulic diameter. On the other hand, based on the unit pumping power, the microtube heat sink can dissipate slightly larger heat rate than the microchannel heat sink.
Besides, Ryu et al. [16] have presented the numerical analysis of the manifold microchannel heat sink. It is concluded that this heat sink has better performances than the classical microchannel heat sink, lower thermal resistance and more uniform temperature distribution for the same pumping power. The optimization of the heat sink geometric parameters is done to obtain the best heat transfer characteristics.
For the microchannel heat sinks with large length to diameter ratio and uniform inlet velocity feeding of the channels, the fluid flow and thermal regime are fully developed for almost the total channel length. As the heat transfer coefficient is lower in this case, another option is to induce flow instabilities and consequently to establish developing fluid flow and heat transfer along the channel.
Sung and Mudawar [17] analyzed the hybrid jet impingement microchannel heat sink in turbulent heat transfer and fluid flow. It was shown that the vorticity has the large influence on a zone outside the impingement jet. The stronger attachment of the fluid flow to the heated surface for higher Re is observed. It was also proposed the improved design of the heat sink based on the optimized analysis that lowers the temperature distribution of the heated surface.
Following this review of the cooling solutions used for electronic and high power devices, the microtube heat sink with impingement jet is analyzed. To extend the benefits from the fluid flow attachment to the tube wall, the inlet impingement jet is tangentially positioned to the microtube.
2 Problem description and numerical details
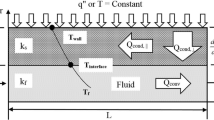
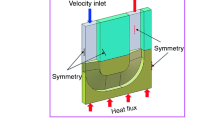
The microtube heat sink assembly proposed for numerical analysis is presented in the Fig. 1 and dimensions are given in Table 1. It might be observed that feeding of the microtube heat sink is realized through the gaps on the top surface of the heat sink. The cross section of the microtube with the inlet channel is presented in the Fig. 2. It can be noticed that the microtube is thermally and hydrodynamically symmetrical with respect to the boundary positioned at the half-length of the microtube. So, only the left part of the microtube is analyzed. Lelea et al. [18] and Lelea [19, 20] have analyzed numerically and experimentally the laminar heat transfer and fluid flow of the water through the single microtube and concluded that conventional theories are applicable to the microtubes with diameters down to 100 μm. Also the Reynolds analogy might be applied for different fluid flow configurations as mentioned in [21–23]. For the phenomena occurring in this case, the set of the Navier-Stokes equations can be used, as follows:

The microtube heat sink assembly with tangential impingement jet

The single microtube geometry
The conservation of mass
The conservation of momentum
The conservation of energy
For the micro-tube heat sink presented in this paper, the following boundary conditions are settled:
-
The fluid flow is stationary, incompressible and laminar;
-
The fluid properties were considered as temperature dependent with following equations:
-
Dynamic viscosity:
$$ {{\upmu}}\left( t \right) = 2.6412018\; \times 10^{ - 4} + 0.0014009 \times {\text{e}}^{{ - {\frac{t}{31.0578605}}}} $$ -
Density:
$$ {{\uprho}}\left( t \right) = 1000.0 \times \left( {1 - {\frac{t + 288.9414}{{508929.2 \times \left( {t + 68.12963} \right)}}} \times \left( {t - 3.9863} \right)^{2} } \right) $$ -
Thermal conductivity:
$$ k\left( t \right) = - 0.58166 + 6.355 \times 10^{ - 3} \times T - 7.964 \times 10^{ - 6} \times T^{2} $$ -
Specific heat:
$$ c_{\text{p}} \left( t \right) = 8958.9 - 40.535 \times T + 0.11243 \times T^{2} - 1.014 \times 10^{ - 4} \times T^{3} $$
-
-
The viscous dissipation is neglected because of the low flow rates;
-
The uniform velocity field and the constant temperature are imposed at the channel inlet, while at the outlet the partial derivates of the velocity and temperature in the stream-wise direction are vanishing;
-
The conjugate heat transfer between the solid and fluid flow is considered and the no-slip velocity conditions at the solid–fluid interface;
The conjugate heat transfer procedure, implies the continuity of the temperature and heat flux at the solid–liquid interface defined as,
Also at the inlet cross-section:
All the outer surfaces of the heat sink are insulated except the bottom one in contact with the chip:
At the outlet of the microtube the following boundary conditions are prescribed:
At the symmetry boundaries:
The set of the partial differential equations along with the boundary conditions are solved using the Fluent commercial solver [24] with methods described in [25]. The Simple algorithm is used for the velocity-pressure coupling solution and second order upwind scheme for equations discretization. The under-relaxation factors are used for pressure field (α = 0.3) and momentum conservation (α = 0.7). The convergence criterion is defined as:
The residuals for velocity components and continuity equation were 10−5 and for temperature field 10−8. Three different grids have been used to test the grid sensitivity, 1 (414 cells at each cross-section, 200 subdivisions in axial direction with total of 82,800 cells), 2 (646,250,161,500) and 3 (1,020,313,319,260). In Fig. 3 is presented the temperature distribution at the centerline of the heat sink bottom surface for these three grids. A difference between the grids 2 and 3 is about 1.5% along the axial direction, so the grid nr. 2 is used for further calculations.

Grid independence test
3 Results and discussion
The results obtained for velocity, pressure and temperature filed are used to calculate the main heat sink parameters like thermal resistance and pumping power. The thermal resistance is calculated as:
while the pumping power is defined as:
The pressure difference is calculated as a difference between the average values at the inlet and outlet cross-sections:
Also the Re is defined as:
In the Fig. 4 the temperature distribution is presented along the heated surface for circular impingement jet heat sink and classic heat sink with front inlet cross-section, and low pumping power Π = 0.003 W. It can be observed that maximum temperature is lower for the jet impingement microtube heat sink (T = 313.21 K for constant fluid properties and T = 311.13 for variable fluid properties) against the classic heat sink (T = 324.14 K). On the hand, the temperature difference along the heated surface is higher for the classic microtube heat sink (ΔT = 19.2 K) than the jet impingement microtube heat sink (ΔT = 9.6 K for constant fluid properties and ΔT = 7.8 K for variable fluid properties). In the jet impingement region the temperature is almost constant, while in the outside region the temperature variation exhibits almost the boundary layer behavior. It means that for very low pumping powers or mass flow rates, the jet zone impingement has negligible influence on outside region toward the microtube outlet cross-section.

The temperature distribution at the bottom heat sink surface along the fluid flow for Π = 0.003 W and two different configurations
In the Fig. 5, the temperature distribution along the centerline of the heated surface is presented for two arrangements and higher pumping power. Once again the jet impingement configuration has both lower maximum temperature (T = 304.84 K for constant fluid properties and T = 304.39 for variable fluid properties) and lower temperature difference (ΔT = 2.5 K for constant fluid properties and ΔT = 2.23 K for variable fluid properties) against the classic microtube heat sink (T = 312.82 K) and (ΔT = 9.8 K). In this case temperature behavior of the jet impingement heat sink has two separate zones outside the jet impingement region, each one with variation similar to boundary layer behavior. This means that the swirl flow created in the jet impingement zone has the impact on a downstream portion of the microtube.

The temperature distribution of a bottom heat sink surface along the fluid flow for Π = 0.055 W and two different configurations
In the Fig. 6, the thermal resistance versus pumping power is presented. Following these observations, it is obvious the thermal resistance for jet impingement microtube heat sink is lower than the thermal resistance of the classic microtube heat sink for the whole range of the pumping power.

Thermal resistance R versus pumping power for three different cases
The fluid viscosity distribution at the outlet cross-section for various mass flow rates is presented in the Fig. 7. For the low flow rates and higher outlet temperatures there is a large variation of viscosity along the cross-section. As it is expected the lower viscosity is observed near the tube wall. For the higher mass flow rates the swirl flow creates the higher mixing of the fluid and more uniform viscosity.

The viscosity distribution at the outlet cross section of the microtube for various mass flow rates
The similar conclusion might be outlined for a density distribution at the outlet cross-section. For lower mass flow rates and higher temperatures the variations in fluid density is observed from tube wall to the axis. Contrary to one that might expect, the portions of the fluid with higher density are not pushed toward the tube wall because of the lower variations in fluid density (Fig. 8).

The density distribution at the outlet cross section of the microtube for various mass flow rates
In Figs. 9 and 10, the fluid path lines for two different mass flow rates are presented. It is observed that for the low flow rates the swirl flow is created without mixing. The flow behavior is similar to the boundary layer one, except for the inlet portion of the tube. For the higher flow rates the swirl flow created by the tangential fluid inlet, increases the fluid mixing and heat transfer coefficient.

The axial velocity path lines for single microtube mass flow rate M = 10 × 10−5 kg/s

The axial velocity path lines for single microtube mass flow rate M = 80 × 10−5 kg/s
4 Conclusions
The numerical modeling of the tangential jet impingement microtube heat sink is presented. The obtained results for temperature and velocity fields are used for performance evaluation against the classic microtube heat sink, in terms of thermal resistance and pumping power. It is concluded that both, lower peak temperature and lower temperature difference are associated to jet impingement heat sink. Therefore an additional effort regarding the inlet manifold is fully justified considering the thermal benefits.
On the other hand, the fluid viscosity has a great influence on a temperature and velocity field and thermal parameters of the heat sink. This observation is valid for the lower flow rates and higher temperatures. Due to the small variations in fluid density, the portions of the fluid with higher density are not pushed toward the tube wall.
Abbreviations
- B :
-
Micro-heat sink width (m)
- b ch :
-
Inlet channel width (m)
- c p :
-
Specific heat (J/kg K)
- D i :
-
Inner diameter (m)
- h ch :
-
Inlet channel height (m)
- H :
-
Micro-heat sink height (m)
- k :
-
Thermal conductivity (W/m K)
- L ch :
-
Inlet channel length (m)
- L :
-
Micro-heat sink length (m)
- M :
-
mass flow rate (kg/s)
- N :
-
Number of the channels (–)
- Δp :
-
Pressure drop (Pa)
- q :
-
Heat flux (W/cm2)
- R :
-
Thermal resistance (cm K/W)
- Re :
-
Reynolds number (–)
- T :
-
Temperature (K)
- T max :
-
Peak temperature (K)
- ΔT :
-
Temperature difference (K)
- u, v, w :
-
Velocity (m/s)
- w m :
-
Module width (m)
- x, y, z :
-
Coordinate (m)
- μ:
-
Dynamic viscosity (Pa s)
- ρ:
-
Density (kg/m3)
- Π:
-
Pumping power (W)
- in:
-
Inlet
- out:
-
Outlet
- f:
-
Fluid
- s:
-
Solid
References
Tuckerman DB, Pease RFW (1981) High-performance heat sinking for VLSI. IEEE Electron Device Lett EDL 2:126–129
Qu W, Mudawar I (2002) Experimental and numerical study of pressure drop and heat transfer in single-phase micro-channel heat sink. Int J Heat Mass Transf 45:2549–2565
Fedorov A, Viskanta R (2000) Three dimensional conjugate heat transfer in the microchannel heat sink for electronic packaging. Int J Heat Mass Transf 41:399–415
Rahman MM (2000) Measurements of heat transfer in microchannels heat sinks. Int Commun Heat Mass Transf 27:495–506
Li J, Peterson GP, Cheng P (2004) Three-dimensional analysis of heat transfer in a micro-heat sink with single phase flow. Int J Heat Mass Transf 47:4215–4231
Wei X, Joshi YK (2004) Stacked microchannel heat sinks for liquid cooling of microelectronics component. ASME J Electron Packag 126:60–66
Patterson MK, Wei X, Joshi Y, Prasher R (2004) Numerical study of conjugate heat transfer in stacked microchannel. Inter Soc Conf Therm Phenom 372–380
Kim SJ, Kim D (1999) Forced convection in microstructures for electronic equipment cooling. J Heat Transf 121:639–645
Kim SJ, Kim D, Lee DY (2000) On the local thermal equilibrium in microchannel heat sink. Int J Heat Mass Transf 43:1735–1748
Liu S, Zhang Y, Liu P (2007) Heat transfer and pressure drop in fractal microchannel heat sink for cooling of electronic chips. Heat Mass Transf 44:221–227
Aynur TN, Kudussi L, Egrican N (2006) Viscous dissipation effect on heat transfer characteristics of rectangular microchannels under slip flow regime and H1 boundary conditions. Heat Mass Transf 42:1093–1101
Chen CH (2006) Slip-flow heat transfer in a microchannel with viscous dissipation. Heat Mass Transf 42:853–860
Hassan I (2006) Thermal-fluid Mems devices: a decade of progress and challenges ahead. ASME J Heat Transf 128:1221–1233
Garimella SV, Sobhan CB (2003) Transport in microchannels—a critical review. Annu Rev Heat Transf 13:1–50
Kroeker CJ, Soliman HM, Ormiston SJ (2004) Three-dimensional thermal analysis of heat sinks with circular cooling micro-channels. Int J Heat Mass Transf 47:4733–4744
Ryu JH, Choi DH, Kim SJ (2003) Three-dimensional numerical optimization of a manifold microchannel heat sink. Int J Heat Mass Transf 46:1553–1562
Sung MK, Mudawar I (2006) Experimental and numerical investigation of single-phase heat transfer using a hybrid jet-impingement/micro-channel cooling scheme. Int J Heat Mass Transf 49:682–694
Lelea D, Nishio S, Takano K (2004) The experimental research on microtube heat transfer and fluid flow of distilled water. Int J Heat Mass Transf 47:2817–2830
Lelea D (2005) Some considerations on frictional losses evaluation of a water flow in microtubes. Int Commun Heat Mass Transf 32:964–973
Lelea D (2007) The conjugate heat transfer of the partially heated microchannels. Heat Mass Transf 44:33–41
Genic SB, Jacimovic BM, Janjic B (2007) Experimental research of highly viscous fluid cooling in cross-flow to a tube bundle. Int J Heat Mass Transf 50:1288–1294
Wang KC, Chiou RT (2006) Local mass/heat transfer from a wall-mounted block in rectangular channel flow. Heat Mass Transf 42:660–670
Incropera FP, DeWitt DP, Bergman TL, Lavine AS (2006) Fundamentals of heat and mass transfer, 6th edn. Wiley, New York
Fluent 6.1.22 documentation. Fluent Inc. 2003
Patankar SV (1980) Numerical heat transfer and fluid flow. McGraw Hill, New York
Acknowledgments
This work has been financially supported by the Romanian National University Research Council (CNCSIS) and Ministry of Education and Research of Romania.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lelea, D. The microtube heat sink with tangential impingement jet and variable fluid properties. Heat Mass Transfer 45, 1215–1222 (2009). https://doi.org/10.1007/s00231-009-0495-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00231-009-0495-8