
Abstract
Activity patterns of animals often relate to environmental variables such as food availability and predation pressure. Technological advances are providing us with new tools to monitor and better understand these activity patterns. We used animal-attached data loggers recording acceleration and depth to compare activity patterns and vertical habitat use of whale sharks (Rhincodon typus) at Ningaloo Reef, Western Australia. Whale sharks showed a moderate reverse diel vertical migration but exhibited a clear crepuscular pattern in locomotory activity. Peak activity occurred at sunset, whereas vertical movement peaked prior to this. Typical ram surface filter feeding could be identified and occurred primarily during sunset and the first hours of night. At such times, direct observations indicated whale sharks were feeding on tropical krill swarms. Kinematic analysis of postural data and data from vertical movement suggests that whale sharks at Ningaloo spend ~8 min per day actively ram surface filter feeding. Considering the high biomass present in krill schools, it is estimated that whale sharks at Ningaloo have a similar energy intake as those at other aggregation sites. Diel patterns in activity and diving behaviour suggest that whale sharks have tuned their diving behaviour in anticipation of the formation of these high-density patches which appear to only be periodically, but predictably available at sunset. Our results confirm that diel patterns in vertical habitat selection and vertical movements do not necessarily reflect patterns in activity and foraging behaviour. Direct quantification of activity and behaviour is required in gaining accurate representation of diel activity patterns.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Diel changes in vertical habitat use (e.g. diel vertical migration, DVM) have been widely documented in aquatic predators and are considered to be the result of changes in the distribution of prey, which are driven by ambient light levels (Croxall et al. 1985; Watanabe et al. 2004; Sims et al. 2005; Shepard et al. 2006). Decreased light levels at night time are thought to reduce predation pressure on zooplankton by visual predators, which explains why zooplankton feed in surface waters during low light conditions and descend into deeper waters during daytime (Loose and Dawidowicz 1994; Folt and Burns 1999; Hays 2003). For planktivores, such as filter-feeding whale (Rhincodon typus) and basking sharks (Cetorhinus maximus), the daily shift in vertical habitat use is thought to be a direct response to the DVM of its prey (Sims et al. 2005), whilst higher trophic level predators shift their position in the water column with respect to their prey that follows vertically migrating zooplankton (Hays 2003). Thus, the majority of pelagic sharks are thought to undertake diel shifts in habitat selection for the purpose of increasing their foraging efficiency by tracking vertically migrating prey (West and Stevens 2001; Weng and Block 2004; Graham et al. 2006; Saunders et al. 2011).
Past studies investigating the patterns of activity and habitat selection of marine mega-vertebrates have largely been constrained by available technology (Ropert-Coudert and Wilson 2005; Whitney et al. 2012); commonly used animal-attached tags record depth along with temperature and ambient light, restricting analyses to the vertical component of movement (although some studies may use these data to estimate global position via geolocation). Nonetheless, such studies have resulted in unparalleled insights into the habits of some of the most enigmatic species on our planet (Boustany et al. 2002; Sims et al. 2005; Skomal et al. 2009; Block et al. 2011; Campana et al. 2011). Such work necessarily involves some inference with regard to the processes driving the observed movement. For instance, even though a shark may shift its position in the water column between day and night, this does not necessarily mean it is tracking prey; it could be making use of colder temperatures at deeper depths to decrease metabolism while not foraging, as has been suggested for blue sharks (Prionace glauca) (Campana et al. 2011). Many such uncertainties can be addressed using more sophisticated data-logging technology sampling more parameters, including, for example, tri-axial acceleration (Goldbogen et al. 2006; Wilson et al. 2008; Shepard et al. 2009b). Acceleration data can quantify locomotory activity [a powerful proxy of metabolic rate (Wilson et al. 2006a; Halsey et al. 2008; Clark et al. 2010; Gleiss et al. 2010)], as well as deduce the behaviour of an individual based on its body motion or posture (Yoda et al. 2001; Shepard et al. 2010; Nathan et al. 2012). Indeed, over recent years, a number of studies have shown the power of accelerometers to contextualise the observed movement patterns of sharks (Whitney et al. 2007, 2010; Gleiss et al. 2009a, 2011b; Nakamura et al. 2011). Accelerometers therefore appear to be a powerful tool to provide additional perspective to data obtained from depth sensors and help explain the mechanisms driving vertical movement, behaviour and general activity by individual sharks.
Whale sharks have been subject to multiple tagging studies (Gunn et al. 1999; Graham et al. 2006; Wilson et al. 2006b; Rowat and Gore 2007), which have elucidated both short and long-term horizontal movements, as well as vertical movement. Whale sharks are filter-feeding sharks that are well known for forming dense aggregations in a few select localities globally, often in order to feed (Heyman et al. 2001; Meekan et al. 2006; Holmberg et al. 2008; de la Parra Venegas et al. 2011; Ramírez-Macías et al. 2012). At Ningaloo Reef, Western Australia, whale sharks aggregate annually between March and June (Meekan et al. 2006; Holmberg et al. 2008). Mark-recapture studies of photograph-identified sharks suggest a mean residency time of approx. 33 days where sharks swimming near the surface are commonly observed by tourists (Holmberg et al. 2008). Acoustic tracking studies during this annual residency have shown that sharks remain within close proximity and move in a primarily parallel manner to the fringing Ningaloo Reef (Gunn et al. 1999). The coastal region of the Ningaloo Current contains high nutrient concentrations which are reflected in higher phytoplankton biomass than nearby oceanic waters (Woo et al. 2006), forming the basis of the food-web at the site. Despite the increased productivity of the North-West Shelf, whale sharks are rarely observed feeding at Ningaloo (Taylor 2007) and their vertical movement patterns lack the clear diel patterns (Gunn et al. 1999; Wilson et al. 2006b) that are commonly observed in planktivorous sharks while feeding in coastal waters (Sims et al. 2005; Motta et al. 2010). In the present study, we aimed to clarify the relationship between vertical migration and activity of whale sharks at Ningaloo, with a view to ascertain if the lack of diel patterns in depth use is indicative of sporadic foraging opportunities, with a view to clarify the role of the Ningaloo whale shark aggregation as a potential foraging hotspot.
Methods
Field protocol
Whale sharks were tagged at Ningaloo Reef (22°39′S; 113°33′E) off the Northwest Cape of Western Australia. All equipment and tagging procedures are described in detail elsewhere (Gleiss et al. 2009b, 2011b). In brief, multi-sensor data loggers (Wilson et al. 2008) were encased in buoyant housing and attached to free-swimming sharks using a fin-clamp attached to the second dorsal fin. Clamps consisted of a torsion spring, studded with two short spikes, which barely penetrated the skin of the fin, but would maintain the consistent orientation necessary to measure locomotor activity and animal orientation by the accelerometer. Data loggers automatically popped-off following the corrosion of a galvanic timed release and were recovered using VHF telemetry (Gleiss et al. 2009b).
Data treatment
Acceleration data were measured in three orthogonal axes, measuring surge, heave and sway (see Fig. 1a). The acceleration data consist of two components: the static acceleration, which represents the sensor’s orientation in relation to the earth’s gravitational pull (Yoda et al. 2001; Shepard et al. 2009a), and the dynamic acceleration, which measures the change in velocity of the sensor and therefore indicates locomotory activity (Wilson et al. 2006a; Shepard et al. 2009a). We determined the optimal smoothing window to separate the two components using the method detailed in Shepard et al. (2009a); raw data were smoothed using a moving average filter with a window of 5 s (i.e. smoothing over 20 data points for sampling frequencies of 4 Hz and 40 data points for sampling frequencies of 8 Hz), with the filtered data estimating static acceleration. Pitch angle was subsequently calculated from static surging acceleration:
where pitch (°) refers to the animals orientation with regard to the horizontal plane (Fig. 1b), a static surge referring to the smoothed surging acceleration and β to the offset of the tag’s axis in relation to the animal’s axis, as a result of imperfect placement of the logger. β was determined using the method described in Kawatsu et al. (2010), by using the regression of vertical velocity and pitch (see Gleiss et al. 2011b). Dynamic body acceleration (DBA) was used as a single proxy for locomotory power output (Wilson et al. 2006a; Gleiss et al. 2011c) and is defined as the absolute dynamic acceleration added from the different acceleration channels. Due to device-generated noise in the surging acceleration in 2008, we only used partial dynamic body acceleration (PDBA y, z ) of the y-axis and z-axis to derive our proxy locomotory effort (Green et al. 2009), thus avoiding problems of estimates not being consistent between years.

a Schematic diagram of a tagged whale shark showing the three components of acceleration recorded by the accelerometer. b Schematic figure elaborating on the definition of pitch angle during ascents (+α) and descents (−α) calculated from the static surge (See “Materials and Method”)
Data extraction
Due to the high sampling frequency in all channels, we sub-sampled 5-min mean values from the PDBA data, which reduces the large variability in activity estimates, due to peaks and troughs in acceleration data during the tail beat cycle (Gleiss et al. 2009a). We also calculated a 5-min mean value for the depths that sharks utilised, as well as absolute vertical velocity (VV) as an index for the degree of vertical movement, defined as the rate of change in depth over a 10-s period. This data reduction allowed us to analyse patterns in activity and vertical movement using computationally intensive statistical procedures (see “Statistical analysis” section).
In addition to analysing the entire time-series dataset, we also resampled the data to capture diel patterns in diving behaviour. Whale sharks at Ningaloo Reef undertake frequent oscillatory dives, as these dives are not evenly spaced in time within the datasets prevents the use of statistical procedures accounting for auto-correlation (see “Statistical analysis” section). To avoid this problem, we resampled our time series at consecutive 30-min intervals. Within each consecutive 30-min interval of our data, we calculated the % time spent in the upper 2 m of the water column and two currencies related to diving behaviour. We calculated (1) the maximum pitch angle during a 30-min period, which is equivalent to the steepest pitch angle during ascent from any dive performed in a 30-min period and (2) the deepest depths occupied within the same period. The maximum pitch angle during ascents represents a simple indicator of diving currency in whale sharks; steeper angles minimise the vertical cost of transport and shallower angles minimise the horizontal cost of transport, therefore giving an indication as to whether sharks were moving to cover horizontal or vertical distance, i.e. searching a horizontally restricted area or moving away from the patch previously occupied, respectively (Gleiss et al. 2011b).
Statistical analysis
To reconstruct the patterns in activity from the 8 sharks, we used a generalised additive mixed model (GAMM), implemented in the mgcv library (Wood 2006) in R (R Development Core Team 2010). GAMMs allow for nonlinear responses in the data, while accounting for differences in the measured parameters observed for different individuals. The addition of individual whale shark as a random effect, thus avoids pseudo-replication. Moreover, GAMMs permit the addition of a correlation structure to the model, which is of particular importance when dealing with serially correlated time series data, such as the ones in this study. GAMMs optimise the “wiggliness” of fitted data, by penalising fits with increasingly nonlinear characteristics, therefore providing an unbiased assessment of the relationship between response and predictor. Optimal smoothing is automatically performed by the mgcv package, using cross-validation. We modelled the serial dependence in our data using an auto-regressive process of order 1 (AR1) (Zuur et al. 2009), which assumes that the magnitude of the data at time t is affected by the magnitude of the data at time t − 1, where the magnitude of the serial dependence is determined by the auto-correlation function. Auto-correlation was tested on initial model fits (excluding a correlation structure) through the autocorrelation function, revealing a steady decline of serial correlation with increasing lag, supporting the choice in AR1 (Zuur et al. 2009). The correlation at lag = 1 (Table 2) was then used in specifying the correlation structure of the data and added as a term to the final model (Zuur et al. 2009). Error structures of the models were chosen or data were transformed after testing model assumptions (Zuur et al. 2010). All movement data (depth, vertical velocity and activity) were modelled as a function of time of day (covariate), while accounting for individual differences between individuals (random effect) and accounting for serial correlation. As our covariate (time of day) is circular, we used a cyclic smoother implemented in mgcv package (the “cc” smoother).
Results
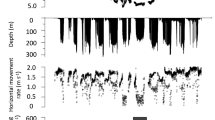
Data loggers recorded a total of 222 h of continuous activity and depth data from 8 whale sharks, resulting in a mean deployment duration of 27 ± 15 h per shark (Table 1). Sharks generally showed a multitude of different patterns of vertical movement, including continuous bounce diving and isolated V-shaped dives (Gleiss et al. 2011b), as well as protracted periods swimming near the surface (Gleiss et al. 2011b). Activity showed considerable variability with periods of low vs elevated activity and varying degrees of vertical movement (Fig. 2). Overall, whale sharks showed considerable variability in depth use over the 24-h cycle (Fig. 2).

Representative 24 h trace of a whale shark’s depth use, posture and activity, ascertained by a multi-channel data logger
Time series GAMMs
All time series data showed considerable auto-correlation, reaffirming the importance of accounting for serial correlation within the model. GAMM fits revealed a significant change in the mean occupied depth, representing a moderate (~10 m) reverse DVM (Table 2). Significant fits were also obtained for activity (PDBA, Table 2) and vertical movement (absolute vertical velocity, Table 2) in relation to Time of Day. A clear peak in activity was evident at sunset (0.12 g) and a minor peak at sunrise (0.1 g, Fig. 3), indicative of crepuscular activity. Activity subsequently declined to the lowest levels around midnight (0.6 g, Fig. 3). The degree of vertical movement was greatest prior to sunset (~0.25 m s−1) and showed a decline after this initial peak (Fig. 3). Vertical movement was at its lowest around midday (~0.12 m s−1) and after sunset (~0.17 m s−1, Fig. 3).

General additive mixed model of 5-min means for depth (a) and partial dynamic body acceleration (b) absolute vertical velocity (c) for all 8 whale sharks over the 24-h day (222 h worth of data). Depth use showed considerable variability and only minor diel vertical migration. Vertical movement (absolute vertical velocity) was greatest prior to sunset and midnight, while being lowest during daylight hours. Activity (PDBA) showed a primarily crepuscular pattern, with a major increase in activity around sunset and a minor increase around sunrise, whereas night showed low levels of activity. Colours represent individual whale sharks
In contrast to mean occupied depths, maximum depth of the resampled time series did not show any significant diel trends (Fig. 4a). Diel trends were, however, detected in the % time spent in surface waters, revealing that sharks spent the least amount of time in surface waters at midnight, more during daytime (~20 %) and peak utilisation of surface waters at sunset (~40 %, Fig. 4b). The maximum pitch angles observed within each 30-min period also displayed a significant diel pattern, with steeper ascent angles recorded during daytime than during night time. The model revealed the steepest ascent angle to occur prior to sunset (Fig. 4c).

General additive mixed model of the 30-min resampled time series for maximum depth (a), % time spent in surface waters (b) and the maximum ascent pitch angle measure by the accelerometer (c). Note the lack of a diel pattern in maximum dive depth, but a crepuscular pattern in time spent in surface waters and a diel pattern in maximum ascent angle, which is greatest at the onset of twilight. Fits for all additive models are given in Table 2
Activity in surface waters
Visual observations of feeding sharks
On several occasions during the field season in 2012, aggregations of up to 20 whale sharks could be observed filter feeding at the surface around sunset together with Mobula sp. (Rafinesque 1810) and other planktivorous fish. The prey items consisted mainly of Pseudeuphausia latifrons with swarms in the top 50 cm of the water column and concentrated in areas of approximately 30–50 m diameter. While feeding, the first dorsal fin and much of the dorsal part of the sharks’ heads usually cleared the water, demonstrating a body posture with a pitch angle greater than horizontal. Tail beat frequency and swim speed were also visibly higher than in animals observed during the day (personal observations BN and NL, Fig. 5).

Example traces of kinematic and activity data of a whale shark in surface water during the day (a) and during sunset (b). Note the difference in activity (PDBA) and the extended periods of sharks swimming with a positive angle of attack (indicated by grey box) at sunset, which remains primarily absent during the day (b)
Tag data
The increased activity and residence in surface waters at sunset was accompanied by periods of between 2 and 20 min of increased swimming attitude (increased pitch) at the surface (depth <2 m) and a corresponding increase in PDBA, while maintaining constant depth (absolute vertical velocity <0.05 m s−1, see Fig. 5). These kinematic parameters resemble those of sharks performing ram surface feeding (see Fig. 6 in visual observations, Nelson and Eckert 2007; Taylor 2007). In an effort to quantify the duration of sharks engaged in kinematically similar behaviour, we calculated the duration where sharks were moving with limited vertical velocity (between −0.05 and 0.05 m s−1), while still maintaining a positive angle of attack >10°. These postural definitions are based on previous measurements by direct observations (Nelson and Eckert 2007; Motta et al. 2010). Based on our observations and those of other workers (see Fig. 6 in visual observations, Nelson and Eckert 2007; Taylor 2007) of increased activity during ram surface feeding, we chose the 90th percentile of activity values to qualify as putative feeding behaviour, given that the previous two categories were also met. The total amount of time spent performing such activity for all sharks tagged reached 77 min, with the most amount of time performing the activity at sunset (33 min, 5.38 % of sunset), although some periods were noted during the day (17 min, 0.34 % of the daytime) and at night (27 min, 0.46 % of night time), resulting in a daily estimated ram surface-feeding duration of 8.3 min.

Still images of a whale shark vigorously ram surface filter feeding on a swarm of tropical krill, (Pseudeuphausia latifrons) just prior to sunset north east of Ningaloo Reef near the Murion Islands (21°35.285S, 114°16.771E). a, b and c showing the typical posture of ram surface filter-feeding sharks. d Note the dense swarm of P. latifrons visible in front of the sharks’ mouth. © Brad Norman
Discussion
The continuous advances in the sensors available for animal tagging studies are opening the doors to investigations into the physiology and behaviour of difficult to study species. Acceleration data loggers are providing a new means to understand both the behaviour and movement energetics in wide range of vertebrates and are increasingly used to infer the temporal changes in animal activity. Although our datasets are short (8 whale sharks over a total of 222 h) in comparison with those typically employed in acoustic telemetry or satellite tagging yielding depth data, the highly detailed behavioural information gathered from the data loggers afford detailed insights into the movement of whale sharks that are not attainable using other techniques (Gleiss et al. 2009a; Whitney et al. 2010). For marine animals, data on the depth distribution have historically provided a sole estimate of temporal dynamics of activity, with little means of investigating underlying assumptions. Our data provide novel insights into the behavioural ecology of whale sharks, while also highlighting some common issues related to inferring patterns of activity from depth data alone.
Estimating activity: depth versus locomotory activity
Our data clearly demonstrate differing patterns in the activity rhythms inferred from depth use patterns and those from locomotor activity measured using accelerometers. This is an important finding, considering that depth use patterns are sometimes considered a proxy for the level of activity in fish or as an indicator of rhythmicity in activity. Although this approach may be warranted in benthic animals, where a strong dichotomy between active and inactive exists (Wearmouth and Sims 2009), continuously swimming animals prove more difficult. Whereas whale sharks at Ningaloo displayed a moderate reverse DVM was detected in this study (Fig. 3a), acceleration data confirmed a clear crepuscular pattern in activity (Fig. 3c). The peaks in activity around sunset were accompanied by posture data indicative of feeding behaviour. This confirms that depth selection may in some cases have limited applicability in inferring activity in sharks, particularly planktivorous species, such as whale sharks.
Diel changes in the function of vertical movement
A common difficulty in interpreting data on the vertical movement of pelagic fish has been gathering evidence for any of the many competing hypotheses that may provide the reason for observed movements, which include searching the water column, thermoregulation and efficient locomotion (Carey and Scharold 1990; Klimley et al. 2002). The addition of further layers of data on the movement and activity gives further means to infer the function of the observed diving behaviour. Our data suggest that in the case of whale sharks at Ningaloo, the function of vertical movement likely changes on a diel basis, as a result of changing environmental conditions influencing the behaviour of the sharks’ prey.
At sunset, the apparent predictability of zooplankton being available to whale sharks may be the reason for the emergence of such predictable patterns in some of the diving characteristics. The peak in vertical activity prior to sunset is an indication of sharks anticipating the availability of their prey, triggering vertical search of the water column. This is further exemplified by the periods preceding dusk activity being characterised by the greatest ascent pitch angles, confirming that whale sharks were indeed performing a vertical search of the water column (Gleiss et al. 2011b), as opposed to the low ascent angles typical of movement aimed at minimising the cost of horizontal transport (Weihs 1973; Gleiss et al. 2011a), which dominate night time. Rhythmicity in diving behaviour has previously been shown to correspond to the behaviour of prey, which gives credit to the hypothesis that sharks may have intimate knowledge where their prey is likely to aggregate (Graham et al. 2006).
At night, continuous bounce dives that occur are characteristic of straight movement paths (Gleiss et al. Unpublished data). Straight movement paths would not be characteristic of feeding behaviour where area-restricted search would be expected (Sims and Quayle 1998; Papastamatiou and Lowe 2012; Papastamatiou et al. 2012), suggesting that little feeding occurs at this time. We hypothesise that this time is used to travel between patches of productivity within the Reef system, such as the channels which have been shown to be characteristic of frontal zones with associated high productivity (Wilson et al. 2002).
During the day, sharks spent ~25 % of their time swimming near the surface. An additional hypothesis that has recently received support in influencing the diving behaviour of whale sharks is thermoregulation (Thums et al. 2012). The generally high temperatures in our study (24–26 °C), even at depth, are close to the point (25 °C) at which whale sharks appear to cease diving for thermoregulatory purpose. However, this hypothesis should not be discounted in explaining some of the surface swimming behaviour, due to the potentially beneficial physiological implications of greater temperatures.
Twilight foraging: a potential role of prey behaviour?
Nocturnal ascents into surface waters are a common behaviour of zooplankton, which is thought to decrease the risk of predation by visual predators and has been shown to affect the foraging patterns of a wide range of species (Hays 2003). Indeed, vertical migrations of planktonic prey influence the vertical habitat selection of marine predators (Croxall et al. 1985), including filter-feeding sharks (Sims et al. 2005). For large filter feeders, density of prey is pivotal in governing feeding success (Goldbogen et al. 2011) and, more importantly, whether to feed at all (Sims 1999). Considering the whale sharks at Ningaloo appear to show only minor diel patterns in depth selection, yet pronounced phases of ram surface filter feeding and high activity at sunset, may suggest that temporal dynamics of aggregation of the zooplankton prey represents the critical factor in influencing the behaviour of whale sharks at Ningaloo, rather than the vertical migration per se. Active surface ram filter feeding is only thought to be utilised by whale sharks when prey densities are highest—87.0 × 103 ± 21.9 × 103 individual copepods m−3 compared to 5.9 × 103 ±985 m−3 when passive feeding (Nelson and Eckert 2007). The prevalence of ram surface filter feeding at sunset would therefore suggest that dense patches of potential prey are primarily available during these times only.
Ningaloo: a foraging hotspot?
Compared to other seasonal aggregation sites, such as Mexico or Belize (Graham et al. 2006; Motta et al. 2010), whale sharks at Ningaloo Reef show little diel changes in depth use (Gunn et al. 1999; Wilson et al. 2006b). Contrary to Ningaloo, whale sharks in Mexico’s Quintana Roo aggregation site show strong reverse DVM, with virtually all of daytime spent in surface waters feeding near continuously (Motta et al. 2010) and similar patterns are also observed at other aggregation sites (Heyman et al. 2001; Rowat et al. 2007). Observations of active surface feeding have remained scarce at Ningaloo, possibly as a result of the primary feeding behaviour occurring at sunset and early parts of the night, as supported by our direct observations and those of Taylor (Taylor 2007). Although sharks at Ningaloo spend less time in surface waters than those at other sites (Rowat and Gore 2007; Motta et al. 2010), daytime swimming in surface waters ranges from 10 to 40 %, indicating that swimming in surface waters does not always equate to active feeding. In order to gain a deeper understanding of the potential importance of this twilight feeding behaviour, comparisons of estimated feeding durations are warranted. Motta et al. (2010) estimated whale sharks of similar size to devote 7.5 h day−1 to feeding in Quintana Roo, Mexico. With the reasonable assumption that sharks of the same size of the same species and possibly population (Schmidt et al. 2009; Sequeira et al. 2013) have a similar energy demand, we can estimate the required prey density to achieve similar net energy gain, based on our conservative estimates of foraging time and the filtering volume of a feeding whale shark (Motta et al. 2010). The daily ration of 14,931 kJ for a 4.2 m whale shark (Motta et al. 2010) has to be met in the putative time spent feeding (8.3 min in our case), resulting in a required energy intake of 1799 kJ min−1. We can calculate the required prey density based on the filtering volume of 326 m3 h−1 (Motta et al. 2010) or 5.4 m3 min−1, yielding 331 kJ m−3 of required planktonic prey. The only quantitative estimate of the density of krill in high-density swarms is that of Wilson et al. (2001): surface swarming of P. latifrons on which whale sharks were feeding at Ningaloo were found in swarms of 77000 individual krill m−3. Assuming a mass of individual krill with length of 9.59 mm of ~0.009 g, based on the length–weight relationship of the Euphausiacea (Mauchline 1967), the biomass present in the krill swarm sampled by Wilson et al. (2001) is ~770 g m−3. Given no data exist for the energy density of P. latifrons, we will assume the energy density to be similar the zooplankton studied by Motta et al. (2010) (i.e. 1.357 kJ/g), which is a conservative assumption, seeing as euphausids generally have higher energy density (e.g. 4.6 kJ/g in Euphausia superba). Combining data of foraging time, filtering volume, krill density and energy density result in a conservative estimate of a daily ration of 47,121 kJ/day for Ningaloo sharks. Although this value represents a crude estimate of the bioenergetics of whale sharks feeding at Ningaloo, it exemplifies that even though foraging time may be low, putative energy gains from schooling krill can be so high that energy intake may be 3× greater than in Mexico. Indeed, Wilson et al. (2001) have previously hypothesised that the aggregation of whale sharks at Ningaloo may be linked to schooling behaviour of tropical krill, although no conclusive evidence could be found to support this notion in more detailed studies (Wilson et al. 2002, 2003), perhaps as a result of the apparently sporadic nature of these plankton aggregations. Although there remains the question as to how common such dense aggregations are, the potentially extraordinarily high foraging return supports the hypothesis that Ningaloo is a profitable foraging location, even though the temporal dynamics of movement and foraging time differs considerably from other locations, as a result of prey being primarily available to sharks around sunset.
Conclusions
Our data show that the most important period of the day for feeding whale sharks at Ningaloo was sunset with high activity levels coupled with prolonged periods spent in surface waters feeding. The active surface-feeding behaviour at this time closely resembles the behaviour of whale sharks previously monitored at this site by direct observation (Taylor 2007), as well as our recent observations, where sharks primarily fed on tropical krill. The potentially high biomass present in krill swarms likely only requires sharks to feed for several minutes per day rendering the putative energy gain by whale sharks while aggregating at Ningaloo equal to other sites where whale sharks are observed to feed more frequently. This potentially high energy intake may play an important role in the annual aggregation of these animals along the coastline of NW Western Australia. We also conclude that patterns in depth use do not necessarily reflect rhythmicity of animal activity and the simple dynamics of vertical migration are probably not adequate to make inferences about foraging patterns of pelagic animals, especially those that are planktivorous. Data from additional sensors, such as the accelerometers in this study, can provide much needed context for the interpretation of movement patterns from free-swimming fish.
References
Block B, Jonsen I, Jorgensen S, Winship A, Shaffer S, Bograd S, Hazen E, Foley D, Breed G, Harrison AL (2011) Tracking apex marine predator movements in a dynamic ocean. Nature 475:86–90
Boustany AM, Davis SF, Pyle P, Anderson SD, Le Boeuf BJ, Block BA (2002) Satellite tagging: expanded niche for white sharks. Nature 415:35–36
Campana SE, Dorey A, Fowler M, Joyce W, Wang Z, Wright D, Yashayaev I (2011) Migration pathways, behavioural thermoregulation and overwintering grounds of blue sharks in the Northwest Atlantic. PLoS One 6:e16854
Carey FG, Scharold JV (1990) Movements of blue sharks (Prionace glauca) in depth and course. Mar Biol 106:329–342
Clark TD, Sandblom E, Hinch SG, Patterson DA, Frappell PB, Farrell AP (2010) Simultaneous biologging of heart rate and acceleration, and their relationships with energy expenditure in free-swimming sockeye salmon (Oncorhynchus nerka). J Comp Physiol B 180:673–684. doi:10.1007/s00360-009-0442-5
Croxall J, Everson I, Kooyman G, Ricketts C, Davis R (1985) Fur seal diving behaviour in relation to vertical distribution of krill. J Anim Ecol 54:1–8
de la Parra Venegas R, Hueter R, Cano JG, Tyminski J, Remolina JG, Maslanka M, Ormos A, Weigt L, Carlson B, Dove A (2011) An unprecedented aggregation of whale sharks, Rhincodon typus, in Mexican Coastal waters of the Caribbean Sea. PLoS One 6:e18994
Folt CL, Burns CW (1999) Biological drivers of zooplankton patchiness. Trends Ecol Evol 14:300–305
Gleiss AC, Gruber SH, Wilson RP (2009a) Multi-channel data-logging: towards determination of behaviour and metabolic rate in free-swimming sharks. In: Nielsen JL, Arrizabalaga H, Fragoso N, Hobday A, Lutcavage M, Sibert J (eds) Tagging and tracking of marine animals with electronic devices. Springer, New York, pp 213–228
Gleiss AC, Norman B, Liebsch N, Francis C, Wilson RP (2009b) A new prospect for tagging large free-swimming sharks with motion-sensitive data-loggers. Fish Res 97:11–16. doi:10.1016/j.fishres.2008.12.012
Gleiss AC, Dale JJ, Holland KN, Wilson RP (2010) Accelerating estimates of activity-specific metabolic rate in fish: testing the applicability of acceleration data-loggers. J Exp Mar Biol Ecol 385:85–91. doi:10.1016/j.jembe.2010.01.012
Gleiss AC, Jorgensen SJ, Liebsch N, Sala JE, Norman B, Hays GC, Quintana F, Grundy E, Campagna C, Trites AW (2011a) Convergent evolution in locomotory patterns of flying and swimming animals. Nat Commun 2:352
Gleiss AC, Norman B, Wilson RP (2011b) Moved by that sinking feeling: variable diving geometry underlies movement strategies in whale sharks. Funct Ecol 25:595–607. doi:10.1111/j.1365-2435.2010.01801.x
Gleiss AC, Wilson RP, Shepard ELC (2011c) Making overall dynamic body acceleration work: on the theory of acceleration as a proxy for energy expenditure. Methods Ecol Evol 2:34–42. doi:10.1111/j.2041-210X.2010.00057.x
Goldbogen JA, Calambokidis J, Shadwick RE, Oleson EM, McDonald MA, Hildebrand JA (2006) Kinematics of foraging dives and lunge-feeding in fin whales. J Exp Biol 209:1231–1244. doi:10.1242/jeb.02135
Goldbogen J, Calambokidis J, Oleson E, Potvin J, Pyenson N, Schorr G, Shadwick R (2011) Mechanics, hydrodynamics and energetics of blue whale lunge feeding: efficiency dependence on krill density. J Exp Biol 214:131–146
Graham RT, Roberts CM, Smart JCR (2006) Diving behaviour of whale sharks in relation to a predictable food pulse. J R Soc Interface 3:109–116
Green JA, Halsey LG, Wilson RP, Frappell PB (2009) Estimating energy expenditure of animals using the accelerometry technique: activity, inactivity and comparison with the heart-rate technique. J Exp Biol 212:471–482. doi:10.1242/jeb.026377
Gunn JS, Stevens JD, Davis TLO, Norman BM (1999) Observations on the short-term movements and behaviour of whale sharks (Rhincodon typus) at Ningaloo Reef, Western Australia. Mar Biol 135:553–559
Halsey LG, Shepard ELC, Quintana F, Gomez Laich A, Green JA, Wilson RP (2008) The relationship between oxygen consumption and body acceleration in a range of species. Comp Biochem Physiol A 152:197–202
Hays GC (2003) A review of the adaptive significance and ecosystem consequences of zooplankton diel vertical migrations. Hydrobiologia 503:163–170
Heyman WD, Graham RT, Kjerfve B, Johannes RE (2001) Whale sharks Rhincodon typus aggregate to feed on fish spawn in Belize. Mar Ecol Prog Ser 215:275–282
Holmberg J, Norman B, Arzoumanian Z (2008) Estimating population size, structure, and residency time for whale sharks Rhincodon typus through collaborative photo-identification. Endanger Species Res 7:39–53
Kawatsu S, Sato K, Watanabe Y, Hyodo S, Breves JP, Fox BK, Grau EG, Miyazaki N (2010) A new method to calibrate attachment angles of data loggers in swimming sharks. EURASIP J Adv Signal Process 1–6. doi:10.1155/2010/732586
Klimley AP, Beavers SC, Curtis TH, Jorgensen SJ (2002) Movements and swimming behavior of three species of sharks in La Jolla Canyon, California. Environ Biol Fishes 63:117–135
Loose CJ, Dawidowicz P (1994) Trade-offs in diel vertical migration by zooplankton: the costs of predator avoidance. Ecology 75:2255–2263
Mauchline J (1967) Volume and weight characteristics of species of Euphausiacea. Crustaceana 13:241–248
Meekan MG, Bradshaw CJA, Press M, McLean C, Richards A, Quasnichka S, Taylor JG (2006) Population size and structure of whale sharks Rhincodon typus at Ningaloo Reef, Western Australia. Mar Ecol Prog Ser 319:275–285
Motta PJ, Maslanka M, Hueter RE, Davis RL, de la Parra R, Mulvany SL, A SJ, Habegger ML, Mara KR, Gardiner JM, Tyminski JP, Zeigler LD (2010) Feeding anatomy, filter-feeding rate, and diet of whale sharks Rhincodon typus during surface ram filter feeding off the Yucatan Peninsula, Mexico. Zoology 113:199–212
Nakamura I, Watanabe Y, Papastamatiou Y, Sato K, Meyer C (2011) Yo-yo vertical movements suggest a foraging strategy for tiger sharks Galeocerdo cuvier. Mar Ecol Prog Ser 424:237–246. doi:10.3354/meps08980
Nathan R, Spiegel O, Fortmann-Roe S, Harel R, Wikelski M, Getz WM (2012) Using tri-axial acceleration data to identify behavioral modes of free-ranging animals: general concepts and tools illustrated for griffon vultures. J Exp Biol 215:986–996
Nelson JD, Eckert SA (2007) Foraging ecology of whale sharks (Rhincodon typus) within Bahia de Los Angeles, Baja California Norte, Mexico. Fish Res 84:47–64
Papastamatiou Y, Lowe C (2012) An analytical and hypothesis‐driven approach to elasmobranch movement studies. J Fish Biol 80:1342–1360
Papastamatiou YP, DeSalles PA, McCauley DJ (2012) Area-restricted searching by manta rays and their response to spatial scale in lagoon habitats. Mar Ecol Prog Ser 456:233–244
R Development Core Team (2010) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna
Ramírez‐Macías D, Meekan M, La Parra‐Venegas D, Remolina‐Suárez F, Trigo‐Mendoza M, Vázquez‐Juárez R (2012) Patterns in composition, abundance and scarring of whale sharks Rhincodon typus near Holbox Island, Mexico. J Fish Biol 80:1401–1416
Ropert-Coudert Y, Wilson RP (2005) Trends and perspectives in animal-attached remote sensing. Front Ecol Environ 3:437–444
Rowat D, Gore M (2007) Regional scale horizontal and local scale vertical movements of whale sharks, in the Indian Ocean off Seychelles. Fish Res 84:32–40
Rowat D, Meekan MG, Engelhardt U, Pardigon B, Vely M (2007) Aggregations of juvenile whale sharks (Rhincodon typus) in the Gulf of Tadjoura, Djibouti. Environ Biol Fishes 80:465–472. doi:10.1007/s10641-006-9148-7
Saunders RA, Royer F, Clarke MW (2011) Winter migration and diving behaviour of porbeagle shark, Lamna nasus, in the Northeast Atlantic. ICES J Mar Sci 68:166–174
Schmidt JV, Schmidt CL, Ozer F, Ernst RE, Feldheim KA, Ashley MV, Levine M (2009) Low genetic differentiation across three major ocean populations of the whale shark, Rhincodon typus. PLoS One 4:e4988
Sequeira AMM, Mellin C, Meekan MG, Sims DW, Bradshaw CJA (2013) Inferred global connectivity of whale shark Rhincodon typus populations. J Fish Biol 82:367–389. doi:10.1111/jfb.12017
Shepard ELC, Ahmed MZ, Southall EJ, Witt MJ, Metcalfe JD, Sims DW (2006) Diel and tidal rhythms in diving behaviour of pelagic sharks identified by signal processing of archival tagging data. Mar Ecol Prog Ser 328:205–213
Shepard ELC, Wilson RP, Halsey LG, Quintana F, Laich AG, Gleiss AC, Liebsch N, Myers AE, Norman B (2009a) Derivation of body motion via appropriate smoothing of acceleration data. Aquat Biol 4:235–241. doi:10.3354/Ab00104
Shepard ELC, Wilson RP, Quintana F, Gómez Laich A, Forman DW (2009b) Pushed for time or saving on fuel: fine-scale energy budgets shed light on currencies in a diving bird. Proc R Soc B 276:3149–3155. doi:10.1098/rspb.2009.0683
Shepard ELC, Wilson RP, Quintana F, Gomez Laich A, Liebsch N, Albareda DA, Halsey LG, Gleiss A, Morgan DT, Myers AE, Newman C, Macdonald DW (2010) Identification of animal movement patterns using tri-axial accelerometry. Endanger Species Res 10:47–60
Sims DW (1999) Threshold foraging behaviour of basking sharks on zooplankton: life on an energetic knife-edge? Proc R Soc Lond B Biol Sci 266:1437–1443
Sims DW, Quayle VA (1998) Selective foraging behaviour of basking sharks on zooplankton in a small-scale front. Nature 393:460–464
Sims DW, Southall EJ, Tarling GA, Metcalfe JD (2005) Habitat-specific normal and reverse diel vertical migration in the plankton-feeding basking shark. J Anim Ecol 74:755–761. doi:10.1111/j.1365-2656.2005.00971.x
Skomal GB, Zeeman SI, Chisholm JH, Summers EL, Walsh HJ, McMahon KW, Thorrold SR (2009) Transequatorial migrations by basking sharks in the Western Atlantic Ocean. Curr Biol 19:1019–1022
Taylor JG (2007) Ram filter-feeding and nocturnal feeding of whale sharks (Rhincodon typus) at Ningaloo Reef, Western Australia. Fish Res 84:65–70
Thums M, Meekan M, Stevens J, Wilson S, Polovina J (2012) Evidence for behavioural thermoregulation by the world’s largest fish. J R Soc Interface 10:20120477
Watanabe Y, Baranov EA, Sato K, Naito Y, Miyazaki N (2004) Foraging tactics of Baikal seals differ between day and night. Mar Ecol Prog Ser 279:283–289
Wearmouth VJ, Sims DW (2009) Movement and behaviour patterns of the critically endangered common skate Dipturus batis revealed by electronic tagging. J Exp Mar Biol Ecol 380:77–87
Weihs D (1973) Mechanically efficient swimming techniques for fish with negative buoyancy. J Mar Res 31:194–209
Weng KC, Block BA (2004) Diel vertical migration of the bigeye thresher shark (Alopias superciliosus), a species possessing orbital retia mirabilia. Fish Bull 102:221–229
West GJ, Stevens JD (2001) Archival tagging of school shark, Galeorhinus galeus, in Australia: initial results. Environ Biol Fishes 60:283–298
Whitney NM, Papastamatiou YP, Holland KN, Lowe CG (2007) Use of an acceleration data logger to measure diel activity patterns in captive whitetip reef sharks, Triaenodon obesus. Aquat Living Resour 20:299–305. doi:10.1051/alr:2008006
Whitney N, Pratt HJ, Pratt T, Carrier J (2010) Identifying shark mating behaviour using three-dimensional acceleration loggers. Endanger Species Res 10:71–82. doi:10.3354/esr00247
Whitney NM, Papastamatiou YP, Gleiss AC (2012) Integrative multi-sensor tagging of elasmobranchs: emerging techniques to quantify behavior, physiology, and ecology. In: Carrier JC, Heithaus MR, Musick JA (eds) Biology of sharks and their relatives, vol 2. CRC Press, Boca Raton
Wilson S, Pauly T, Meekan MG (2001) Daytime surface swarming by Pseudeuphausia latifrons (Crustacea, Euphausiacea) off Ningaloo Reef, Western Australia. Bull Mar Sci 68:157–162
Wilson SG, Pauly T, Meekan MG (2002) Distribution of zooplankton inferred from hydroacoustic backscatter data in coastal waters off Ningaloo Reef, Western Australia. Mar Freshw Res 53:1005–1016
Wilson SG, Carleton JH, Meekan MG (2003) Spatial and temporal patterns in the distribution and abundance of macrozooplankton on the southern North West Shelf, Western Australia. Estuar Coast Shelf Sci 56:897–908
Wilson RP, White CR, Quintana F, Halsey LG, Liebsch N, Martin GR, Butler PJ (2006a) Moving towards acceleration for estimates of activity-specific metabolic rate in free-living animals: the case of the cormorant. J Anim Ecol 75:1081–1090
Wilson SG, Polovina JJ, Stewart BS, Meekan MG (2006b) Movements of whale sharks (Rhincodon typus) tagged at Ningaloo Reef, Western Australia. Mar Biol 148:1157–1166
Wilson RP, Shepard ELC, Liebsch N (2008) Prying into the intimate details of animal lives: use of a daily diary on animals. Endanger Species Res 4:123–137. doi:10.3354/esr00064
Woo M, Pattiaratchi C, Schroeder W (2006) Summer surface circulation along the Gascoyne continental shelf, Western Australia. Cont Shelf Res 26:132–152. doi:10.1016/j.csr.2005.07.007
Wood SN (2006) Generalized additive models: an introduction with R. Chapman and Hall/CRC, Boca Raton
Yoda K, Naito Y, Sato K, Takahashi A, Nishikawa J, Ropert-Coudert Y, Kurita M, Le Maho Y (2001) A new technique for monitoring the behaviour of free-ranging Adelie penguins. J Exp Biol 204:685–690
Zuur AF, Ieno EN, Walker NJ, Saveliev AA, Smith GM (2009) Mixed effects models and extensions in ecology with R. Springer, New York
Zuur AF, Ieno EN, Elphick CS (2010) A protocol for data exploration to avoid common statistical problems. Methods Ecol Evol 1:3–14
Acknowledgments
S.W. is funded by a Postgraduate Scholarship from the Fisheries Society of the British Isles. A.C.G. is funded by a Wingate Foundation Scholarship and a Swansea University Research Fees Scholarship. B.N. is funded through ECOCEAN Inc. and Murdoch University Research Studentship. Three anonymous referees, Sabrina Fossette and Graeme Hays gave helpful suggestions that greatly improved the quality of this paper. Whale shark fieldwork was funded by Royal Caribbean Cruise Lines (Ocean Fund), the Murdoch University Foundation and a Rolex Award for Enterprise under permit by the Western Australian Department of Environment and Conservation (DEC). The crew of RV Bo Kooling, L. Longley, G. Shedrawi, H. Shortland-Jones, D. Morgan, S. Lindfield, D. Bradley, E. Wilson, DEC and Department of Fisheries, Western Australia provided essential field support. This paper is dedicated to the memory of Clive “Q” Francis—without Clive, none of our tags would have ever been deployed on whale sharks.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by J. D. R. Houghton.
Adrian C. Gleiss and Serena Wright are joint first authors with equal contribution.
Rights and permissions
About this article
Cite this article
Gleiss, A.C., Wright, S., Liebsch, N. et al. Contrasting diel patterns in vertical movement and locomotor activity of whale sharks at Ningaloo Reef. Mar Biol 160, 2981–2992 (2013). https://doi.org/10.1007/s00227-013-2288-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00227-013-2288-3